Изобретение относится к авиации и пригодно для всех типов самолетов.
Известны самолеты, содержащие, в частности, двигатель/двигатели, см. «Самолет с управлением флюгерная утка» пат. №RU 2410286. У всех известных самолетов тяга двигателя/двигателей направлена вперед параллельно продольной оси самолета, а подъемная сила создается за счет обтекания крыла с определенным аэродинамическим качеством. Это не является оптимальным, так как, направив тягу двигателя чуть вверх, можно получить приращение суммарной подъемной силы самолета.
ИЗОБРЕТЕНИЕ 1. С целью получения большей подъемной силы и, следовательно, большего аэродинамического качества самолета, данный самолет имеет двигатель/двигатели, который направлен вверх-вперед относительно продольной оси самолета, или источник тяги которого направлен вверх-вперед относительно продольной оси самолета. См. фиг.1. Последнее означает, что двигатель может быть направлен как угодно, но источник его тяги, движитель (воздушный винт, пропфэн, второй контур, сопло турбины) расположен под углом к двигателю и его вектор направлен вверх-вперед.
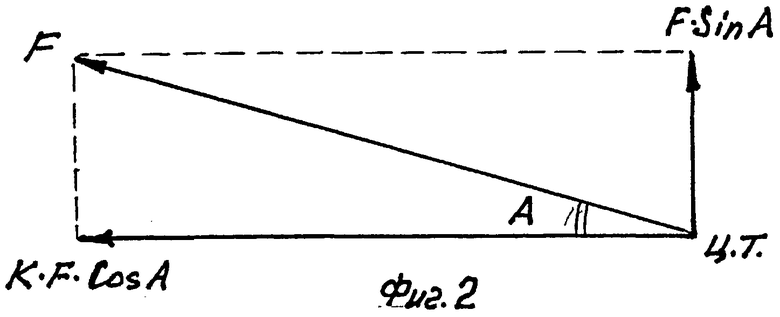
Разумеется, угол разворота двигателя верх относительно продольной оси (по аналогии с крылом будем называть этот угол «углом атаки двигателя») будет иметь какой-то оптимум. Рассчитаем его, см. фиг.2. Допустим, вектор тяги двигателя F направлен вперед-вверх под оптимальным углом А. Тогда двигатель сам создает подъемную силу FSinA, и за счет качества самолета K создается подъемная сила KFCosA. He путать качество самолета с качеством крыла! Качество самолета определяется так: из подъемной силы крыла вычитается отрицательная подъемная сила на заднем горизонтальном оперении ЗГО (если оно заднее), и получается попросту вес самолета P. Вес самолета делится на сопротивление крыла, сопротивление ЗГО, киля, фюзеляжа, пилонов, гондол двигателей и вспомогательных устройств (антенн, датчиков и т.п.), то есть попросту - на тягу двигателя, K=P/F. И это качество будет сильно отличаться от качества чистого крыла.
Суммарная подъемная сила равна весу самолета, то есть:
FSinA+KFCosA=Р
Для определения экстремума берем первую производную:
FCosA-KFsinA=0 или
FCosA=KFSinA или
CtgA=K или tgA=1/K получаем.
A=arcctgK=arctg(1/K)
То, что первая производная имеет значение, равное нулю,, означает, что экстремум существует, и что суммарная подъемная сила двигателя и крыла будет несколько выше, чем при горизонтальном расположении двигателя. Этот выигрыш будет невелик, но он будет, а это главное.
Но такой самолет кроме небольшого выигрыша в подъемной силе имеет другое большое преимущество перед обычным самолетом: допустим, летчик понял, что он недотягивает до полосы. Резкое увеличение тяги не даст быстрого результата, если скорость самолета невелика и уже близка к скорости сваливания. Увеличение тангажа и вовсе может привести к катастрофе. Обычный самолет некоторое время будет продолжать падать, пока существенно не увеличит скорость.
А данный самолет в такой ситуации за счет синусной составляющей тяги сразу плавно, но уверенно начнет набирать высоту. Это позволит избежать многих катастроф, особенно в сложных погодных условиях.
Разумеется, двигатель, расположенный под углом А, должен быть так расположен по высоте, чтобы вектор его тяги проходил через центр тяжести самолета ц.т., или хотя бы проходил как можно ближе к нему. Благоприятной для этого компоновкой обладают самолеты-верхнепланы с двигателями под крыльями на пилонах, самолеты-низкопланы с двигателями над крыльями на пилонах, и самолеты истребители с двигателями в фюзеляже или на уровне фюзеляжа (особенно на больших сверхзвуковых скоростях, когда реальное аэродинамическое качество самолета резко падает). Компоновка с двигателями на пилонах в задней части фюзеляжа (как у ТУ-154) этому не благоприятствует.
ИЗОБРЕТЕНИЕ 2. Как сказано выше, сам двигатель может быть расположен несколько иначе, чем движитель. В горизонтальном полете двигатель, особенно двухконтурный турбореактивный, желательно располагать параллельно продольной оси самолета, чтобы обеспечить хорошую работу входного устройства компрессора. Однако во время взлета и посадки сам самолет имеет значительный положительный тангаж, и входное устройство обтекается под некоторым углом снизу. Это может вызвать падение тяги, которая особенно нужна при взлете, и даже возникновение помпажа.
С целью хорошей работы входного устройства компрессора данный самолет имеет двигатель/двигатели, входное устройство которого направлено вперед-вниз. Этот угол (будем называть его угол склонения) должен быть таким, чтобы работа двигателя в горизонтальном полете не нарушалась вовсе или нарушалась на исчезающее незначительную величину. Тогда двигатель будет хорошо тянуть в горизонтальном полете, и будет иметь повышенную тягу и запас по помпажу на взлете.
При изменении углов наклона сопел первого и второго контуров и изменении угла наклона входного устройства сам двигатель может оставаться в прежнем - параллельном - положении. И аэродинамическое сопротивление гондолы двигателя не увеличиться.
ИЗОБРЕТЕНИЕ 3. Как сказано выше, вектор тяги двигателей должен проходить через центр тяжести самолета. Если по конструктивным соображениям точного соответствия достичь не удалось, то в систему управления танггажом желательно автоматически вводить поправку на пикирующий или кабрирующий момент, возникающий при изменении тяги двигателя.
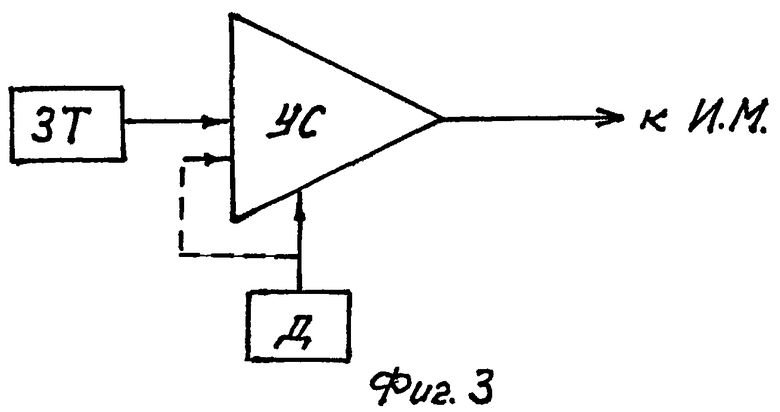
В электродистанционном типе управления это делается достаточно просто: в усилитель, получающий сигнал с задатчика положения горизонтальных рулей или с задатчика тангажа ЗТ (см. фиг.3), вводится сигнал с соединенного с ним датчика тяги двигателя или с датчика положения рычага управления двигателем (РУД) с целью изменения его коэффициента усиления, или этот сигнал с датчика подается в определенном масштабе на вход упомянутого усилителя (на фиг.3 этот вариант показан пунктиром). С усилителя сигнал поступает как обычно - к исполнительным механизмам горизонтальных рулей И.М.
На фиг.1 показан данный самолет-верхнеплан, состоящий из фюзеляжа 1 с крылом 2, килем 3, ЗГО 4 и двигателей 5 на пилонах под консолями крыла. Вектор тяги двигателей отклонен вверх, а входное устройство отклонено вниз.
Допустим, качество крыла равно 40, но с учетом отрицательной подъемной силы на ЗГО и упомянутых аэродинамических сопротивлений качество самолета равно 10. Допустим, тяга двигателя равна 1 т. Тогда при горизонтальном расположении двигателей самолет в равномерном горизонтальном полете на данной высоте с данной скоростью может иметь вес 10 т.
При расположении двигателей вперед-вверх оптимальный угол атаки двигателей составит
A=arcctgK=arctg1/K=arctg 0,1=5,72 градуса.
И подъемная сила несколько увеличится. В остальном самолет функционирует как обычно.
На фиг.3 показана система электро дистанционного управления рулями высоты, где: ЗТ - задатчик положения рулей или задатчик тангажа, УС - усилитель, Д - тензометрический датчик тяги двигателей или датчик положения РУДа.
Работает эта система так: при неизменном режиме работы двигателя усилитель УС отрабатывает сигнал задатчика ЗТ, что приводит к адекватному отклонению рулей. Если вектор тяги двигателя не проходит через центр тяжести самолета «ц.т.», то при изменении тяги сигнал с датчика Д изменяет в нужную сторону коэффициент усиления усилителя, и положение рулей меняется. Или возможен другой вариант: сигнал с датчика Д с нужным знаком подается на вход усилителя, и положение рулей меняется в нужную сторону.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2012 |
|
RU2531706C2 |
| КОСМОЛЕТ СТАРОВЕРОВА (ВАРИАНТЫ) И АЛГОРИТМ ЕГО РАБОТЫ | 2012 |
|
RU2503592C1 |
| КОСМИЧЕСКАЯ РАКЕТА /ВАРИАНТЫ/ И СПОСОБ ЕЕ ПОСАДКИ | 2014 |
|
RU2568630C1 |
| САМОЛЕТ СТАРОВЕРОВА -2 | 2013 |
|
RU2544453C1 |
| ПРОТИВОСАМОЛЕТНАЯ РАКЕТА | 2009 |
|
RU2439476C2 |
| УПРАВЛЕНИЕ "УТКА" - 3 | 2012 |
|
RU2515818C2 |
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2007 |
|
RU2410286C2 |
| УПРАВЛЕНИЕ "УТКА" -2 /ВАРИАНТЫ/ | 2012 |
|
RU2515817C2 |
| САМОЛЕТ ДЛЯ ПОСАДКИ ПРИ БОКОВОМ ВЕТРЕ (ВАРИАНТЫ) | 2008 |
|
RU2400398C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2504815C2 |
Группа изобретений относится к области авиации. По первому варианту самолет содержит фюзеляж, крыло, оперение и двигатель/двигатели. Двигатель/двигатели направлен вверх-вперед относительно продольной оси самолета, или источник тяги которого направлен вверх-вперед относительно продольной оси самолета с учетом аэродинамического качества самолета. По второму варианту самолет содержит фюзеляж, крыло, оперение, электродистанционную систему управления и двигатель/двигатели. В усилитель, получающий сигнал с задатчика положения горизонтальных рулей или с задатчика тангажа, вводится сигнал с соединенного с ним датчика тяги двигателя или с датчика положения рычага управления двигателем, с целью изменения его коэффициента усиления, или этот сигнал с датчика подается в определенном масштабе на вход усилителя. Группа изобретений направлена на получение большей подъемной силы. 2 н.п. ф-лы, 3 ил.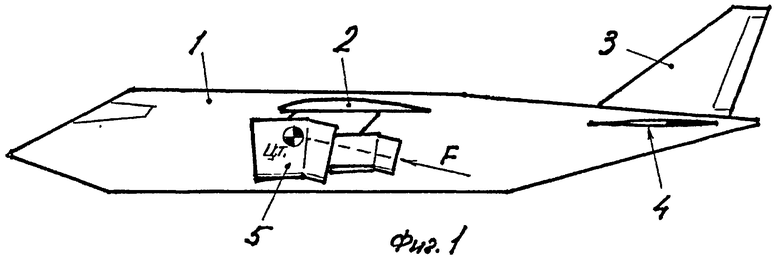
1. Самолет, содержащий фюзеляж, крыло, оперение и двигатель/двигатели, отличающийся тем, что самолет имеет двигатель/двигатели, который направлен вверх-вперед относительно продольной оси самолета, или источник тяги которого направлен вверх-вперед относительно продольной оси самолета, на угол A=arcctgK=arctg(1/K), где K - аэродинамическое качество самолета.
2. Самолет, содержащий фюзеляж, крыло, оперение, электродистанционную систему управления и двигатель/двигатели, отличающийся тем, что в усилитель, получающий сигнал с задатчика положения горизонтальных рулей или с задатчика тангажа, вводится сигнал с соединенного с ним датчика тяги двигателя или с датчика положения рычага управления двигателем, с целью изменения его коэффициента усиления, или этот сигнал с датчика подается в определенном масштабе на вход упомянутого усилителя.
| US 3532306 A, 06.10.1970 | |||
| 0 |
|
SU278068A1 | |
| US 2929580 A, 22.03.1960 | |||
| US 3532306 A, 06.10.1970 | |||
| СПОСОБ ПРИГОТОВЛЕНИЯ ЖЕЛЕЙНОГО МАРМЕЛАДА | 2003 |
|
RU2259114C2 |
| МНОГОРЕЖИМНЫЙ САМОЛЕТ ИНТЕГРАЛЬНОЙ АЭРОДИНАМИЧЕСКОЙ КОМПОНОВКИ | 1998 |
|
RU2138423C1 |

