Изобретение относится к области электротехники, в частности к электроприводам переменного тока, и может быть использовано в качестве электромеханического преобразователя для механизмов, имеющих упругую связь с неподвижной опорой.
Известен двигатель с двойным статором Бушеро (Шенфер К.И. Асинхронные машины. - М.-Л.: Редакция энергетической литературы. 1938. - 412 с. - С.185-187), имеющий два ротора с короткозамкнутыми обмотками и два статора, причем один из статоров может поворачиваться относительно второго.
Недостатками известного технического решения является то, что управление поворотом подвижного статора производится вручную; двигатель подключается к сети непосредственно, что исключает возможность регулировать параметры подводимого к статору напряжения; пуск сопровождается высокими электрическими потерями, вызванными рассеиванием мощности на короткозамыкающем кольце, расположенном между двумя роторами; конструкция предусматривает регулирование величины электромагнитного момента только при пуске двигателя; роторы расположены на одном валу, в связи с чем, его невозможно применить для подавления вибраций корпуса, вызванных переменными нагрузками при установке двигателя на упругой опоре.
Наиболее близким устройством к предлагаемому является асинхронная машина (Асинхронная машина: пат. Рос. Федерации 2161361, МПК7 Н02К 17/42, Н02К 17/30, Н02К 3/20 / М.М.Таегян, П.В.Юргалов, А.В.Романов), включающая два статора и ротор с общей короткозамкнутой обмоткой, причем один из статоров может поворачиваться относительно второго с помощью устройства непрерывного автоматического регулирования углом поворота.
Недостатками известного технического решения, принятого за прототип, является то, что двигатель подключается к сети непосредственно, что исключает возможность регулировать параметры подводимого к статору напряжения, а его ротор расположен на одном валу, в связи с чем данную конструкцию невозможно применить для подавления вибраций корпуса, вызванных переменными нагрузками при установке двигателя на упругой опоре.
Задачей изобретения является снижение вибраций корпуса, вызванных переменными нагрузками при установке двигателя на упругой опоре и повышение его КПД.
Технический результат заявляемого изобретения выражается в предотвращении возникновения колебательных нагрузок при установке двигателя на упругой раме и снижении электромагнитных и механических потерь при пуске и в режиме преодоления нагрузки.
Указанный технический результат достигается тем, что в сдвоенном асинхронном электродвигателе, включающем два ротора с короткозамкнутыми обмотками, неподвижный статор и подвижный статор, согласно изобретению роторы расположены на разных валах, подвижный статор жестко соединен с ротором, относящимся к неподвижному статору, а каждый из статоров подключен к сети через индивидуальный преобразователь частоты, включающий измерительную систему и регулятор скорости.
Таким образом, подключение каждого из статоров двигателя через индивидуальный преобразователь частоты позволит производить одновременно и непрерывно автоматическое регулирование как электромагнитного момента на валу двигателя, относящемуся к неподвижному статору, так и на валу, относящемуся к подвижному статору, причем независимо друг от друга, и также непрерывное регулирование параметров подводимого к статору напряжения, за счет чего реализуется снижение электромагнитных потерь в двигателе как при пуске, так и в режиме преодоления нагрузки. Регулирование электромагнитного момента на валу двигателя, относящемуся к подвижному статору, позволит производить пуск и преодоление двигателем нагрузки на его оконечном валу с минимальными механическими потерями, а регулирование электромагнитного момента на валу двигателя, относящемуся к неподвижному статору, реализует электромагнитную связь подвижного статора с упругой опорой, за счет чего производится активное подавление вибраций корпуса, вызванных переменными нагрузками при установке двигателя на упругой опоре.
Изобретение поясняется рисунком, где схематично показана взаимосвязь составных элементов сдвоенного асинхронного электродвигателя.
Заявляемое устройство состоит из неподвижного статора 1 и подвижного статора 2, жестко соединенного с ротором 3, относящимся к неподвижному статору 1, а ротор 4, относящийся к подвижному статору 2, расположен на оконечном валу двигателя 5. Неподвижный статор 1 имеет устройства крепления, при помощи которых двигатель устанавливается на упругую опору 6, механически связанную с неподвижной опорой 7. Обмотка неподвижного статора 1 подключена к электрической сети через преобразователь частоты 8, а обмотка подвижного статора 2 подключена к сети через преобразователь частоты 9.
Сдвоенный асинхронный двигатель работает следующим образом. К обмоткам неподвижного статора 1 подводится напряжение, создаваемое преобразователем частоты 8, а к обмоткам подвижного статора 2 подводится напряжение, создаваемое преобразователем частоты 9. Каждый из преобразователей частоты 8 и 9 с использованием входящей в свой состав измерительной системы формирует электромагнитный момент на валу двигателя, причем электромагнитный момент M1, формируемый при помощи преобразователя частоты 8, действует на ротор 3, относящийся к неподвижному статору 1, и на подвижный статор 2, поскольку между подвижным статором 2 и ротором 3 существует жесткая связь, а электромагнитный момент М2, формируемый при помощи преобразователя частоты 9, действует на ротор 4, относящийся к подвижному статору 2, и на оконечный вал двигателя 5. Величина создаваемых электромагнитных моментов M1 и М2 задается автоматически конструктивно входящими в состав преобразователей частоты 8 и 9 регуляторами скорости таким образом, чтобы вследствие разницы создаваемых электромагнитных моментов и момента сопротивления на оконечном валу двигателя 5 возникал динамический момент, вызывающий совместное угловое перемещение подвижного статора 2 и ротора 3, относящегося к неподвижному статору 1, а также угловое перемещение ротора 4 относительно подвижного статора 2. Регуляторы, входящие в состав преобразователей частоты 8 и 9, действуют таким образом, чтобы разгон роторов 3 и 4 до требуемой угловой скорости производился за одинаковый промежуток времени. По окончании процесса пуска электромагнитный момент M1, формируемый при помощи преобразователя частоты 8, полностью уравновесит эквивалентный момент М0, возникающий в упругой опоре 6 вследствие свободы движения относительно неподвижной опоры 7, а электромагнитный момент М2, формируемый при помощи преобразователя частоты 8, уравновесит нагрузку, прикладываемую к оконечном валу 5.
Поскольку между неподвижной опорой 7 и подвижным статором 2, к которому относится ротор 4 и оконечный вал двигателя 5, отсутствует непосредственная механическая связь, переходные процессы по моменту, возникающие вследствие изменения основной нагрузки двигателя, будут отражаться на изменении угловой скорости подвижного статора 2, но в условиях автоматического регулирования электромагнитного момента M1, действующего на ротор 3, а следовательно, на неподвижный статор 1, не будут отражаться на эквивалентном моменте М0 упругой опоры 6, таким образом предотвращая возникновение вибраций корпуса, вызванных переменными нагрузками при установке двигателя на упругой опоре.
Поскольку задание требуемой угловой скорости сдвоенного асинхронного электродвигателя реализуется регуляторами скорости, заложенными в преобразователи частоты 8 и 9, тахограмма движения оконечного вала 5 может быть задана таким образом, чтобы минимизировать механические потери при пуске. Автоматическое регулирование электромагнитного момента М2 на оконечном валу 5 позволит снизить механические потери в режиме преодоления нагрузки.
Автоматическое регулирование электромагнитных моментов M1 и М2 обеспечит плавный разгон двигателя при пуске без завышенного потребления токов неподвижным и подвижным статорами 1 и 2 из сети, таким образом обеспечивая снижение электромагнитных потерь в двигателе при пуске. Поскольку электромагнитные моменты M1 и М2 автоматически формируются преобразователями частоты 8 и 9 и могут быть сопоставлены с номинальными значениями величины электромагнитного момента для сдвоенного асинхронного электродвигателя, при снижении нагрузки на оконечном валу 5 без ущерба для перегрузочной способности двигателя может быть снижено значение как активного, так и реактивного тока, потребляемого неподвижным и подвижным статорами 1 и 2 из сети, за счет чего реализуется снижение электромагнитных потерь в двигателе в режиме преодоления нагрузки.
Таким образом, снижение механических и электромагнитных потерь в сдвоенном асинхронном электродвигателе при пуске и в режиме преодоления нагрузки обеспечит повышение его КПД.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИНХРОННО-АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2752234C2 |
| СИНХРОННО-АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С КОРОТКОЗАМКНУТОЙ ОБМОТКОЙ РОТОРА | 1997 |
|
RU2153755C2 |
| РУССКИЙ АВТОМАТИЗИРОВАННЫЙ ПАРАМЕТРИЧЕСКИЙ ЭЛЕКТРОПРИВОД ЯЛОВЕГИ | 2004 |
|
RU2262791C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2022 |
|
RU2791428C1 |
| ДЕЗИНТЕГРАТОР | 2013 |
|
RU2541688C1 |
| Двигатель сепаратора совмещенной конструкции | 2021 |
|
RU2776987C1 |
| АСИНХРОННЫЙ ТРЕХФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2759161C2 |
| АСИНХРОННЫЙ РЕГУЛИРУЕМЫЙ ДВИГАТЕЛЬ | 1990 |
|
RU2031516C1 |
| Самотормозящийся сдвоенный аксиальный асинхронный электродвигатель для привода поточных линий | 2017 |
|
RU2655378C1 |
| ЦЕНТРОБЕЖНЫЙ КРИОГЕННЫЙ КОМПРЕССОР | 1992 |
|
RU2034999C1 |
Изобретение относится к области электротехники, в частности к электроприводам переменного тока, и может быть использовано в качестве электромеханического преобразователя для механизмов, имеющих упругую связь с неподвижной опорой. Технический результат, достигаемый при использовании настоящего изобретения, состоит в предотвращении возникновения колебательных нагрузок, а также в снижении электромагнитных и механических потерь при пуске и в режиме преодоления нагрузки. Указанный технический результат достигается тем, что в сдвоенном асинхронном электродвигателе, включающем два ротора с короткозамкнутыми обмотками, неподвижный статор и подвижный статор, согласно изобретению роторы расположены на разных валах, подвижный статор жестко соединен с ротором, относящимся к неподвижному статору, а каждый из статоров подключен к сети через индивидуальный преобразователь частоты, включающий измерительную систему и регулятор скорости. 1 ил.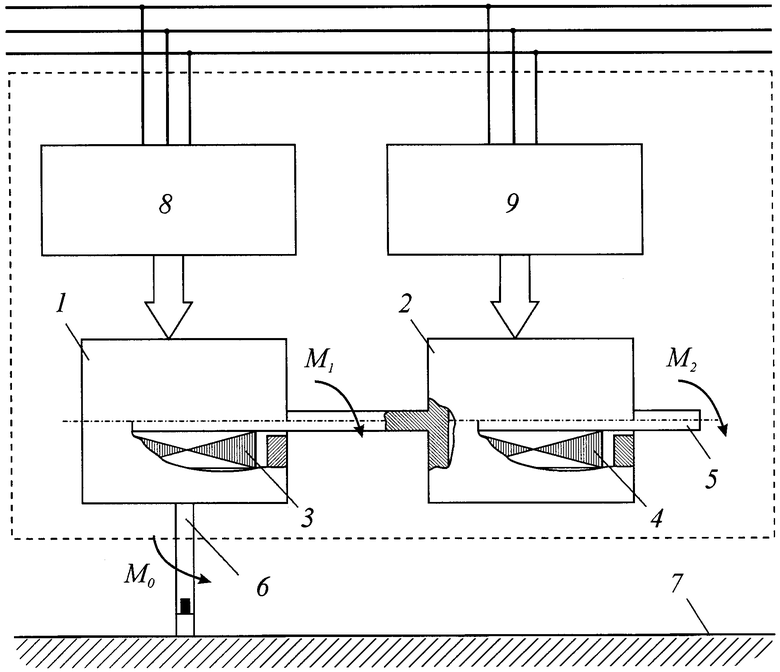
Сдвоенный асинхронный электродвигатель, содержащий два ротора с короткозамкнутыми обмотками, неподвижный статор и подвижный статор, отличающийся тем, что роторы расположены на разных валах, подвижный статор жестко соединен с ротором, относящимся к неподвижному статору, а каждый из статоров подключен к сети через индивидуальный преобразователь частоты, включающий измерительную систему и регулятор скорости.
| АСИНХРОННАЯ МАШИНА | 1999 |
|
RU2161361C1 |
| КАСКАДНЫЙ ЭЛЕКТРИЧЕСКИЙ ПРИВОД | 1991 |
|
RU2050672C1 |
| Каскад электрических машин | 1949 |
|
SU80943A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГ.АТЕЛЬНЫМ АСИНХРОННЫМ КАСКАДНЫМ ЭЛЕКТРОПРИВОДОМ! ^ЬБ-'-О^ГКА | 0 |
|
SU168782A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ ДЛЯ ГЕРМЕТИЧНЫХ ОБЪЕКТОВ | 2000 |
|
RU2173926C1 |
| АСИНХРОННЫЙ РЕГУЛИРУЕМЫЙ ДВИГАТЕЛЬ | 1990 |
|
RU2031516C1 |
| US 3500155 А, 10.03.1970 | |||
| US 4945296 А, 31.07.1990 | |||
| Направляющая втулка | 1982 |
|
SU1170110A1 |
| ШЕНФЕР К.И | |||
| Асинхронные машины | |||
| - М.-Л.: Редакция энергетической литературы, 1938, с.185-187. | |||

