Группа изобретений относится к способам определения координат движущихся объектов.
Способ определения координат источника магнитного поля в горизонтальной плоскости
Известен способ определения основных элементов маневрирования одиночного корабля относительно неподвижной точки, включающий фиксирование техническими средствами (ТС) носителя текущих физических данных объекта (определение текущих координат - радиус-вектора и курсового угла) и определение элементов маневрирования графическим способом или аналитическим посредством решения дифференциальных уравнений относительных перемещений [1].
Известен способ определения координат и параметров движения подводной цели одним вертолетом с опускаемой гидроакустической станцией (ОГАС), работающей в режиме шумопеленгования (ШП), включающий фиксирование техническими средствами (ТС) носителя текущих физических данных объекта (обнаружение подводной цели ОГАС вертолета), определение по трем пеленгам курса цели, подъем ОГАС и перелет вертолета в новую точку зависания, опускание ОГАС, определение пеленга на цель из новой точки, расчет дальности до цели, находящейся в месте пересечения последнего пеленга на нее и расчетного (фиктивного) пеленга из первой точки зависания, установление скорости движения подводной цели [2].
Известен способ определения положения линии траверза источника магнитного поля (МП) на плоскости, заключающийся в фиксировании координат носителя, регистрации значения модуля вектора магнитной индукции (ВМИ) и определении момента времени достижения нарастающим сигналом своего максимума, который соответствует прохождению носителем точки траектории, ближайшей к источнику МП (траверзу) [3].
Известно устройство, которое обеспечивает определение координат источника МП [3]. Такой эффект реализуется за счет пространственного размещения на носителе четырех трехкомпонентных магнитометрических датчиков и измерения в выбранной опорной системе координат углового положения объекта с размещенными на нем датчиками синхронно с измерением ВМИ.
Указанные способы и устройство определения координат движущегося объекта имеют свои недостатки.
Недостатком способа определения основных элементов маневрирования одиночного корабля относительно неподвижной точки является тот факт, что способ основан на прямом измерении текущих координат объекта (курсового угла и дальности) ТС наблюдения.
Недостатком способа определения координат и параметров движения подводной цели одним вертолетом с ОГАС, работающей в режиме ШП, является тот факт, что способ также предусматривает измерение одной из координат объекта (курсового угла) ТС наблюдения.
Недостатком способа определения положения линии траверза источника МП на плоскости является невозможность определения координат объекта.
Недостатком устройства определения координат источника МП является требование пространственного размещения на носителе четырех трехкомпонентных магнитометрических датчиков. Предлагаемый способ нуждается в изменении напряженности МП только одним трехкомпонентным магнитометрическим датчиком, размещенным на носителе.
Целью изобретения является возможность определения координат объектов с помощью фиксирования текущих координат носителя, значений модуля ВМИ и решения аналитической задачи относительного перемещения объекта в горизонтальной плоскости при известном законе изменения модуля ВМИ с изменением расстояния между носителем и объектом.
Поставленная цель достигается (фиг.2) благодаря тому, что в отличие от способов-прототипов, включающих фиксирование ТС носителя текущих физических данных объекта (координат), предлагается осуществлять регистрацию (измерение) текущих координат носителя, значений модуля ВМИ и решать аналитическую задачу относительного перемещения объекта в горизонтальной плоскости при известных элементах движения носителя, значениях модуля ВМИ и законе их изменения в зависимости от расстояния между носителем и объектом.
Так как определение координат объекта осуществляется только по измерению характеристик его МП, то достигается полная независимость работы координатора от других факторов.
О соответствии предложенного технического решения критерию «существенные отличия» свидетельствуют сведения, приведенные в таблице 1.
Предложенное техническое решение соответствует критерию «существенные отличия», так как ни один из отличительных признаков в известных способах не обнаружен.
Достижение положительного эффекта при осуществлении предложенного способа подтверждается сведениями, приведенными в таблице 2.
Техническое осуществление предложенного способа поясняется чертежами, на которых:
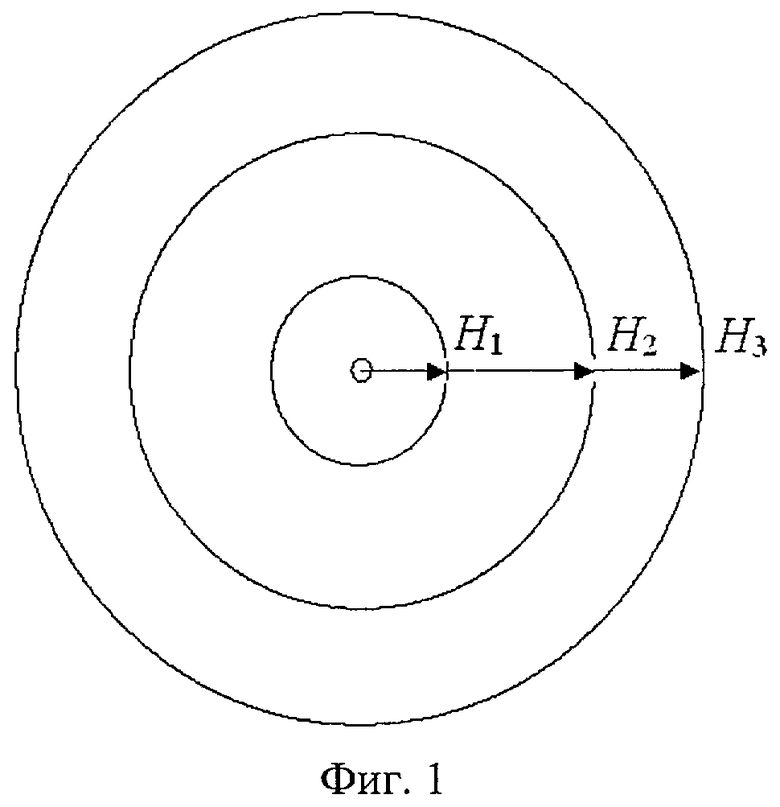
фиг.1 - характеристика напряженности магнитного поля объекта;
фиг.2 - траектория носителя относительно объекта-носителя магнитного поля.
Сущность предлагаемого способа заключается в следующем.
Датчик измерения магнитометрического сигнала (МС), установленный на носитель (далее магнитометр), осуществляет последовательные измерения скалярной величины - модуля ВМИ в процессе движения носителя относительно объекта в горизонтальной плоскости.
Известно, что МС убывает с расстоянием от источника МП пропорционально кубу радиуса, согласно закону Био-Савара-Лапласа [4], [5]:

Из этого следует, что при фиксированном расстоянии r от носителя до объекта, это расстояние связано с измеренным значением МС объекта соотношением:

где k - некоторый коэффициент.
Для исключения неизвестного параметра k осуществляются измерения модуля ВМИ в двух точках траектории носителя. Первое траекторное измерение i=1 при нахождении носителя датчика в точке с координатами (x1, y1) приводит к уравнению:

Аналогично составляется второе уравнение для другой точки i=2 с координатами (х2, у2):

Уравнения (3) и (4) образуют систему уравнений с неизвестным параметром k. Сомножитель  входит линейно и его можно исключить путем деления уравнения (3) на уравнение (4):
входит линейно и его можно исключить путем деления уравнения (3) на уравнение (4):

Полученное уравнение исключает в дальнейшем использование неопределенного параметра k, но и не позволяет найти неизвестные (х, y). Для решения задачи требуется осуществить третье измерение МС в точке i=3 с координатами (х3, y3) и составить следующую систему из двух уравнений:
Решение системы уравнений дает две пары координат объекта-источника МП - истинные и зеркальные относительно линии курса носителя. При наличии двух пар координат объекта с неопределенностью относительно истинного и зеркального положения объекта, полученных по данным магнитометра, для однозначного решения задачи определения местоположения объекта достаточно иметь измеренное направление на объект. Истинным является то местоположение, которое расположено ближе к линии направления ВМИ.
Система нелинейных уравнений (6) решается известными способами, в том числе с использованием современного программного обеспечения, например математических пакетов Mathcad или Matlab.
Способ определения координат источника магнитного поля в пространстве
Известен способ определения основных элементов маневрирования одиночного корабля относительно неподвижной точки, включающий фиксирование техническими средствами (ТС) носителя текущих физических данных объекта (определение текущих координат - радиус-вектора и курсового угла) и определение элементов маневрирования графическим способом или аналитическим посредством решения дифференциальных уравнений относительных перемещений [1].
Известен способ определения координат и параметров движения подводной цели одним вертолетом с опускаемой гидроакустической станцией (ОГАС), работающей в режиме шумопеленгования (ШП), включающий фиксирование техническими средствами (ТС) носителя текущих физических данных объекта (обнаружение подводной цели ОГАС вертолета), определение по трем пеленгам курса цели, подъем ОГАС и перелет вертолета в новую точку зависания, опускание ОГАС, определение пеленга на цель из новой точки, расчет дальности до цели, находящейся в месте пересечения последнего пеленга на нее и расчетного (фиктивного) пеленга из первой точки зависания, установление скорости движения подводной цели [2].
Известен способ определения положения линии траверза источника магнитного поля (МП) на плоскости, заключающийся в фиксировании координат носителя, регистрации значения модуля вектора магнитной индукции (ВМИ) и определении момента времени достижения нарастающим сигналом своего максимума, который соответствует прохождению носителем точки траектории, ближайшей к источнику МП (траверзу) [3].
Известно устройство, которое обеспечивает определение координат источника МП [3]. Такой эффект реализуется за счет пространственного размещения на носителе четырех трехкомпонентных магнитометрических датчиков и измерения в выбранной опорной системе координат углового положения объекта с размещенными на нем датчиками синхронно с измерением ВМИ.
Известен способ определения координат источника МП в горизонтальной плоскости, заключающийся в регистрации (измерении) текущих координат носителя, значений модуля ВМИ и решении аналитической задачи относительного перемещения объекта в горизонтальной плоскости при известных элементах движения носителя, значениях модуля ВМИ и законе их изменения в зависимости от расстояния между носителем и объектом.
Указанные способы и устройство определения координат движущегося объекта имеют свои недостатки.
Недостатком способа определения основных элементов маневрирования одиночного корабля относительно неподвижной точки является тот факт, что способ основан на прямом измерении текущих координат объекта (курсового угла и дальности) ТС наблюдения.
Недостатком способа определения координат и параметров движения подводной цели одним вертолетом с ОГАС, работающей в режиме ШП, является тот факт, что способ также предусматривает измерение одной из координат объекта (курсового угла) ТС наблюдения.
Недостатком способа определения положения линии траверза источника МП на плоскости является невозможность определения координат объекта.
Недостатком устройства определения координат источника МП является требование пространственного размещения на носителе четырех трехкомпонентных магнитометрических датчиков. Предлагаемый способ нуждается в изменении напряженности МП только одним трехкомпонентным магнитометрическим датчиком, размещенным на носителе.
Недостатком способа определения координат источника МП в горизонтальной плоскости является невозможность определения координат объекта в пространстве.
Целью изобретения является возможность определения координат объектов с помощью фиксирования текущих координат носителя, значений модуля ВМИ и решения аналитической задачи относительного перемещения объекта в пространстве при известном законе изменения модуля ВМИ с изменением расстояния между носителем и объектом.
Поставленная цель достигается (фиг.2) благодаря тому, что в отличие от способов-прототипов, включающих фиксирование ТС носителя текущих физических данных объекта (координат), предлагается осуществлять регистрацию (измерение) текущих координат носителя в пространстве, значений модуля ВМИ и решать аналитическую задачу относительного перемещения объекта в пространстве при известных элементах движения носителя, значениях модуля ВМИ и законе их изменения с изменением расстояния между носителем и объектом.
Так как определение координат объекта осуществляется только по измерению характеристик его МП, то достигается полная независимость работы координатора от других факторов.
О соответствии предложенного технического решения критерию «существенные отличия» свидетельствуют сведения, приведенные в таблице 3.
Предложенное техническое решение соответствует критерию «существенные отличия», так как ни один из отличительных признаков в известных способах не обнаружен.
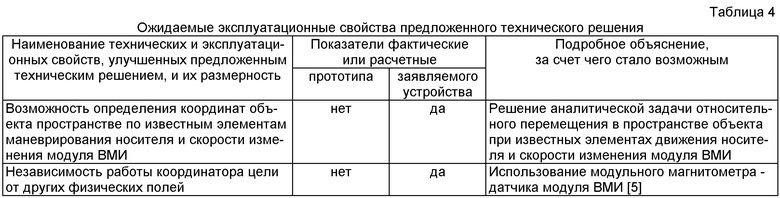
Достижение положительного эффекта при осуществлении предложенного способа подтверждается сведениями, приведенными в таблице 4.
Техническое осуществление предложенного способа поясняется чертежами, на которых:
фиг.1 - характеристика напряженности магнитного поля объекта;
фиг.2 - траектория носителя относительно объекта-носителя магнитного поля.
Сущность предлагаемого способа заключается в следующем.
Датчик измерения магнитометрического сигнала (МС) (далее магнитометр), установленный на носитель, осуществляет последовательные измерения скалярной величины - модуля ВМИ в процессе движения носителя относительно объекта в пространстве.
Известно, что МС убывает с расстоянием от источника МП пропорционально кубу радиуса, согласно закону Био-Савара-Лапласа [4], [5], и определяется формулой (1):
 .
.
Следовательно, при фиксированном расстоянии r от носителя до объекта, это расстояние связано с измеренным значением МС объекта соотношением (2):
где k - некоторый коэффициент.
Для исключения неизвестного параметра k осуществляются измерения модуля ВМИ в двух точках траектории носителя. Первое траекторное измерение i=1 при нахождении носителя магнитометра в точке с координатами (х1, у1, z1) определяется выражением:

Второе траекторное измерение для i=2 (х2, y2, z2) находится аналогично:

Уравнения (7) и (8) образуют систему уравнений с неизвестным параметром k. Сомножитель  входит линейно и его можно исключить путем деления уравнения (7) на уравнение (8):
входит линейно и его можно исключить путем деления уравнения (7) на уравнение (8):

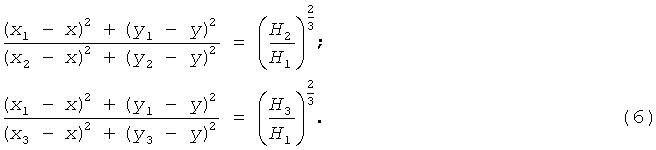
После устранения неопределенности получено уравнение с тремя неизвестными (х, y, z). Полная система из трех уравнений относительно трех неизвестных (х, y, z) может быть получена за счет третьего и четвертого измерений МС:
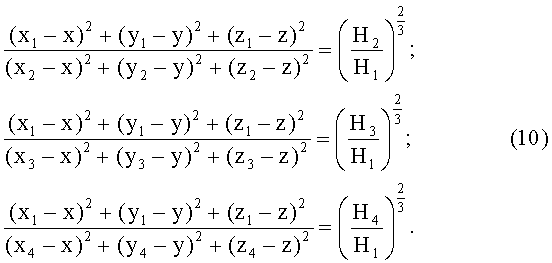
В результате решения системы уравнений (10) получаются три пары координат объекта-источника магнитного поля - истинные и зеркальные относительно вектора курса носителя. При наличии трех пар координат объекта с неопределенностью относительно истинного и зеркального положения объекта, полученных по данным магнитометра, для однозначного решения задачи определения местоположения объекта достаточно иметь измеренное направление на объект. Истинным является то местоположение, которое расположено ближе к линии направления вектора магнитной индукции.
Система нелинейных уравнений (10) решается известными способами, в том числе с использованием современного программного обеспечения, например математических пакетов Mathcad или Matlab.
Источники информации
1. Рабинович Я.Б. Общий анализ относительных перемещений маневрирующих кораблей. Приложение к т.3 Курса кораблевождения. - Л.: УНГС ВМФ, 1958.
2. Колпаков Л.А. и др. Методика определения координат и параметров движения подводной цели, обнаруженной одиночным вертолетом с опускаемой гидроакустической станцией, работающей в режиме шумопеленгования. - М.: ЦСИФ МО РФ, 1994.
3. Смирнов Б.М. Решение задачи определения координат источника магнитного поля // Журнал «Измерительная техника»: ежемесячный научно-технический журнал. - М.: Издательство стандартов, ISSN 0368-1025. - 2003, №7, с.38-42.
4. Ацюковский В.А. Эфиродинамические основы электромагнетизма. - М.: изд. «Петит», 2006. - 160 с.
5. Семевский Р.Б., Аверкиев В.В., Яроцкий В.А. Специальная магнитометрия. - СПб.: Наука, 2002. - 228 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциальный способ поиска и обнаружения подводных лодок | 2022 |
|
RU2797407C1 |
| Способ магнитной навигации подводного аппарата | 2024 |
|
RU2826188C1 |
| Гидроакустический комплекс позиционирования и связи для навигационно-информационного обеспечения автономных необитаемых подводных аппаратов | 2023 |
|
RU2812089C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ (ПЕЛЕНГА И ДИСТАНЦИИ) И ПАРАМЕТРОВ ДВИЖЕНИЯ (КУРСА И СКОРОСТИ) МОРСКОЙ ШУМЯЩЕЙ ЦЕЛИ | 2017 |
|
RU2649887C1 |
| УТОЧНЕННОЕ ПОЗИЦИОНИРОВАНИЕ В ПОДВОДНОМ НАВИГАЦИОННОМ ПРОСТРАНСТВЕ, ОБРАЗОВАННОМ ПРОИЗВОЛЬНО РАССТАВЛЕННЫМИ ГИДРОАКУСТИЧЕСКИМИ МАЯКАМИ-ОТВЕТЧИКАМИ | 2011 |
|
RU2488842C1 |
| Корабль освещения подводной обстановки | 2022 |
|
RU2803404C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433427C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ | 2022 |
|
RU2801977C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ НАБЛЮДАЕМОГО ФЕРРОМАГНИТНОГО ОБЪЕКТА | 2021 |
|
RU2778326C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
Группа изобретений относится к способам определения координат движущихся объектов. В способе фиксируют техническими средствами носителя текущих физических данных объекта. В качестве физических данных используется модуль вектора напряженности магнитного поля объекта. Величина изменения полученных физических данных сопоставляется с известным законом их изменения с изменением относительного взаимоположения носителя и объекта. Решаются задачи относительного перемещения объекта и носителя на плоскости или в пространстве. Достигается возможность определения координат объекта только по изменению характеристик его магнитного поля. 2 н.п. ф-лы, 2 ил., 4 табл.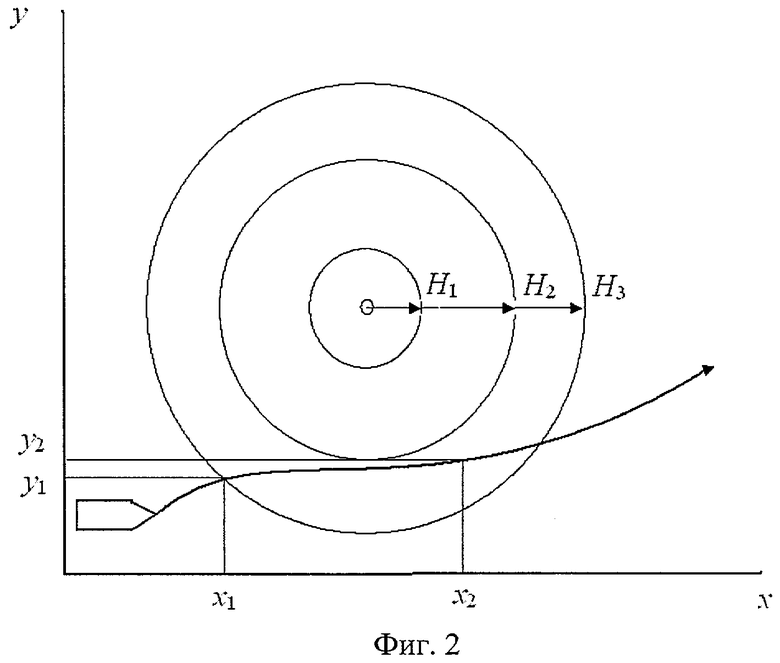
1. Способ определения координат объекта, включающий фиксирование техническими средствами носителя текущих физических данных объекта, решение аналитической задачи относительного перемещения объекта на плоскости при известных элементах движения носителя и величине изменения полученных физических данных, отличающийся тем, что в качестве физических данных используется модуль вектора напряженности магнитного поля объекта, величина изменения полученных физических данных сопоставляется с известным законом их изменения с изменением относительного взаимоположения носителя и объекта, и решается задача относительного перемещения объекта и носителя на плоскости.
2. Способ определения координат объекта, включающий фиксирование техническими средствами носителя текущих физических данных объекта, решение аналитической задачи относительного перемещения объекта при известных элементах движения носителя и закона изменения полученных физических данных, отличающийся тем, что в качестве физических данных используется модуль вектора напряженности магнитного поля объекта, величина изменения полученных физических данных сопоставляется с известным законом их изменения с изменением относительного взаимоположения носителя и объекта, и решается задача относительного перемещения объекта и носителя в пространстве.
| БОРТОВАЯ МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНОЙ ЛОДКИ | 1978 |
|
SU1840306A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВОГО ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 2000 |
|
RU2166735C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ С ПОДВИЖНОГО ОБЪЕКТА | 2002 |
|
RU2219497C1 |

