Изобретение относится к области магниторазведки и может быть использовано при поиске и обнаружении подводных лодок (ПЛ) при помощи установленных на подвижном носителе бортовых средств магнитных измерений, в частности скалярных магнитометров.
В существующих авиационных поисковых магнитометрических системах применяются алгоритмы обнаружения ПЛ, основанные на том положении, что в поисковом режиме магнитометр совершает прямолинейное движение [Семевский Р.Б., Аверкиев В.В., Яроцкий В.А. Специальная магнитометрия. СПб.: «Наука», 2002, гл.3].
Наиболее близким по технической сущности к заявляемому является способ поиска и обнаружения ПЛ при помощи бортовых магнитометрических средств, установленных на авиационном носителе [Яроцкий В.А. Методы обнаружения и определения местоположения объектов по их постоянному магнитному полю // Зарубежная радиоэлектроника, №3, стр.48, 1984], принятый в качестве прототипа. Этот способ включает обследование назначенного района поиска ПЛ прямолинейными параллельными галсами при помощи скалярного магнитометра, установленного на подвижном носителе. При этом никакой увязки курса движения носителя с районом поиска ПЛ не предусматривается. Понятие «обследование назначенного района поиска прямолинейными галсами при помощи СМ, установленного на подвижном носителе» означает:
- движение носителя прямолинейными параллельными галсами до полного покрытия района поиска;
- обработку текущих показаний СМ по вышеупомянутым алгоритмам с целью обнаружения в них составляющей, индуцированной ПЛ.
Недостатком указанного способа является уменьшение вероятности правильного обнаружения и соответствующее увеличение вероятности пропуска цели при поиске ПЛ в высоких широтах, если курсы движения носителя не согласованы с физическими параметрами, которыми характеризуется район поиска.
Задачей настоящего изобретения является повышение вероятности правильного обнаружения ПЛ и соответствующее уменьшение вероятности пропуска цели за счет выбора таких курсов движения носителя, которые позволяют максимизировать статистику магнитометрического обнаружения в назначенном районе поиска ПЛ.
Это достигается тем, что в предлагаемом способе поиска и обнаружения ПЛ, включающем обследование назначенного района поиска параллельными прямолинейными галсами при помощи скалярного магнитометра, установленного на подвижном носителе, в отличие от прототипа, в тех районах поиска, где угол J магнитного наклонения вектора индукции геомагнитного поля удовлетворяет условию |J|<20°, обследование назначенного района поиска производится галсами, соответствующими магнитным курсам w=90° и 270°, а в районах поиска, где |J|>20°, обследование производится галсами, соответствующими магнитным курсам w=0° и 180°.
Представим обоснование предлагаемого способа поиска и обнаружения ПЛ. Оно основано на нахождении и анализе зависимости статистики магнитометрического обнаружения от физических параметров, характеризующих район поиска и схему движения носителя.
Район поиска ПЛ характеризуем углом магнитного наклонения вектора индукции геомагнитного поля J, в качестве параметра движения носителя принят его магнитный курс w. В качестве достаточной статистики магнитометрического обнаружения принята энергия Е составляющей магнитометрического сигнала, которую индуцирует в скалярном магнитометре магнитное поле ПЛ [Семевский Р.Б., Аверкиев В.В., Яроцкий В.А. Специальная магнитометрия. СПб.: «Наука», 2002, стр.92-93].
Для преодоления априорной неопределенности статистики относительно курса ПЛ в качестве оценки последней принята энергия  , усредненная по этому параметру:
, усредненная по этому параметру:
где µ0 - магнитная постоянная, М - величина магнитного момента ПЛ, D - величина наклонной траверзной дальности до ПЛ, V - скорость движения носителя (скалярного магнитометра),  - безразмерная энергия, отражающая статистическую зависимость энергии
- безразмерная энергия, отражающая статистическую зависимость энергии  от магнитного наклонения района поиска J и магнитного курса носителя w. Угловыми скобками обозначена процедура усреднения.
от магнитного наклонения района поиска J и магнитного курса носителя w. Угловыми скобками обозначена процедура усреднения.
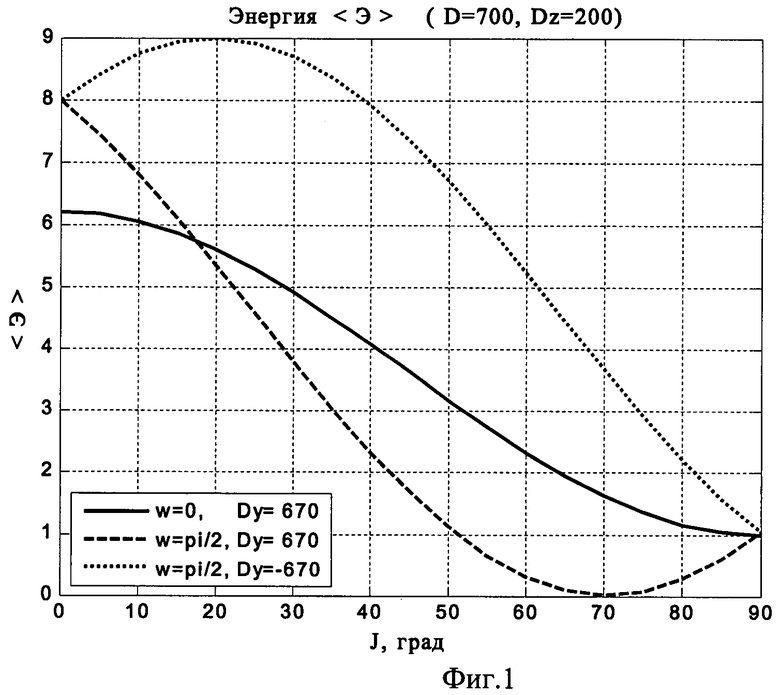
На фиг.1 представлены графики зависимости безразмерной энергии  от угла магнитного наклонения J на магнитных курсах носителя w=0, 90°. Усреднение выполнено по априорно неизвестному курсу ПЛ в предположении равномерного распределения последнего в диапазоне 0÷360°.
от угла магнитного наклонения J на магнитных курсах носителя w=0, 90°. Усреднение выполнено по априорно неизвестному курсу ПЛ в предположении равномерного распределения последнего в диапазоне 0÷360°.
Для величины наклонной траверзной дальности принято значение D=700 м, вертикальное расстояние до ПЛ составляет Dz=200 м, боковое уклонение составляет  .
.
Для уяснения сущности предлагаемого технического решения рассмотрим, как соотносятся значения безразмерной энергии  на ортогональных магнитных курсах w=0, 90° в разных районах поиска ПЛ.
на ортогональных магнитных курсах w=0, 90° в разных районах поиска ПЛ.
Из графиков, представленных на фиг.1, следует, что в районах поиска ПЛ, где 0<J<20°, поиск ПЛ на курсе w=90° статистически более эффективен, чем на курсе w=0, поскольку обеспечивает более высокое значение достаточной статистики магнитометра.
В районах поиска ПЛ, где 20°<J<90°, ситуация существенно иная:
- при пролете носителя справа от ПЛ (Dy<0) значение энергии на курсе w=90° больше, чем на курсе w=0;
- при пролете носителя слева от ПЛ (Dy>0) значение энергии на курсе w=90° меньше, чем на курсе w=0. В частности, при J=70° имеет место экстремально малое отношение этих энергий:
Это приводит к тому, что в половине случаев первичного контакта с ПЛ (конкретно в тех случаях, которые соответствуют пролету носителя справа от ПЛ: Dy>0) поиск ПЛ на курсе w=0 статистически более эффективен, чем на курсе w=90°, поскольку обеспечивает более высокое значение достаточной статистики магнитометра.
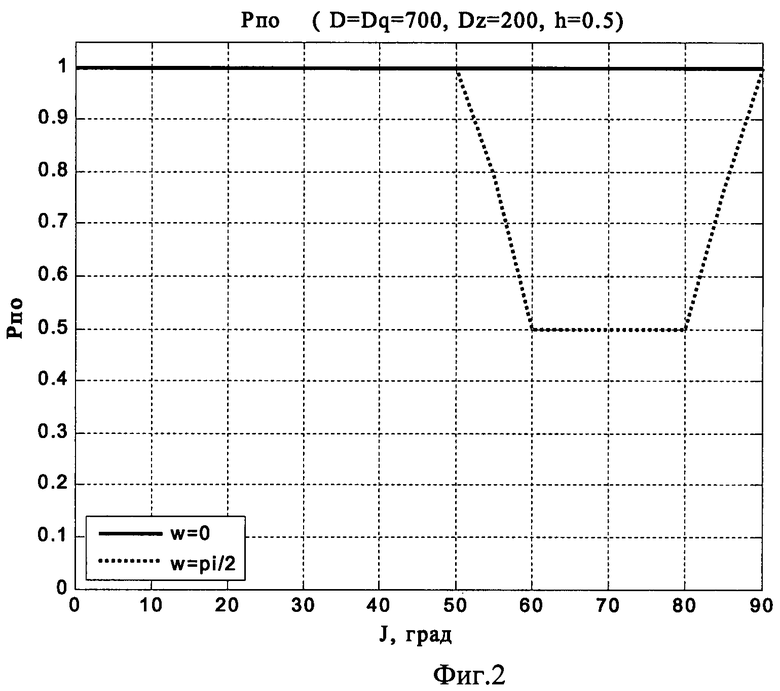
Покажем это на примере поиска ПЛ в районе поиска, который характеризуется углом магнитного наклонения J=70°. Пусть безразмерный порог обнаружения выбран равным h=0.5. Из фиг.1 имеем следующие неравенства:

Это означает, что при поиске ПЛ на курсе w=0 каждый пролет носителя магнитометра в окрестности ПЛ на дальности D обеспечит превышение статистикой магнитометра порога h, т.е. будет зафиксирован факт обнаружения.
При поиске ПЛ на курсе w=90° факт обнаружения ПЛ на дальности D будет зафиксирован только при пролете носителя справа от нее; при пролете носителя слева от ПЛ будет иметь место пропуск цели. А поскольку вероятности пролета справа и слева одинаковы, то первичный контакт с каждой второй ПЛ (в среднем) будет сопровождаться пропуском цели.
Представленный анализ выполнен для случая поиска ПЛ в северном полушарии (0<J<90°). Легко показать, что аналогичные выводы имеют место при поиске ПЛ в южном полушарии. Также очевидно, что статистические характеристики обнаружения на курсе w=270° тождественны тем, что имеют место на курсе w=90°.
Для проверки представленных результатов было выполнено имитационное статистическое моделирование процесса поиска и обнаружения ПЛ при помощи авиационной поисковой магнитометрической системы, основным измерителем которой является скалярный магнитометр. Результаты моделирования представлены на фиг.2. Они полностью подтвердили представленные выводы.
Таким образом, предлагаемый способ поиска и обнаружения ПЛ, заключающийся в выборе определенных курсов движения носителя (скалярного магнитометра), увязанных с районом поиска ПЛ, обеспечивает, в отличие от прототипа, повышение вероятности обнаружения и соответствующее уменьшение вероятности пропуска цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциальный способ поиска и обнаружения подводных лодок | 2022 |
|
RU2797407C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433427C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОЙ МАГНИТНОЙ АНОМАЛИИ | 2007 |
|
RU2411550C2 |
| БОРТОВАЯ МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОЙ ЛОДКИ | 1985 |
|
SU1840171A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433429C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2007 |
|
RU2331090C1 |
| ПРОТИВОЛОДОЧНАЯ КРЫЛАТАЯ РАКЕТА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2014 |
|
RU2546726C1 |
| БОРТОВАЯ МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОЙ ЛОДКИ | 1983 |
|
SU1840173A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТЫ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU1829578C |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ БОРТОВЫМ ОБНАРУЖИТЕЛЕМ С КОМПЕНСАЦИЕЙ ВАРИАЦИЙ МАГНИТНЫХ ПОЛЕЙ | 2019 |
|
RU2709787C1 |
Изобретение относится к области магниторазведки и может быть использовано при поиске и обнаружении подводных лодок (ПЛ) при помощи установленных на подвижном носителе бортовых средств магнитных измерений, в частности скалярных магнитометров. Заявлен способ поиска и обнаружения подводных лодок, согласно которому в районах поиска, где угол J магнитного наклонения вектора индукции геомагнитного поля удовлетворяет условию |J|<20°, обследование назначенного района поиска производится галсами, соответствующими магнитным курсам w=90° и 270°, а в районах поиска, где |J|>20°, обследование производится галсами, соответствующими магнитным курсам w=0° и 180°. Технический результат: повышение вероятности правильного обнаружения и соответствующее уменьшение вероятности пропуска цели за счет выбора таких курсов движения носителя, которые позволяют максимизировать статистику магнитометрического обнаружения в назначенном районе поиска ПЛ. 2 ил.
Способ поиска и обнаружения подводных лодок, включающий обследование назначенного района поиска параллельными прямолинейными галсами при помощи скалярного магнитометра, установленного на подвижном носителе, отличающийся тем, что в тех районах поиска, где угол J магнитного наклонения вектора индукции геомагнитного поля удовлетворяет условию |J|<20°, обследование назначенного района поиска производится галсами, соответствующими магнитным курсам w=90° и 270°, а в районах поиска, где |J|>20°, обследование производится галсами, соответствующими магнитным курсам w=0° и 180°.
| Способ измерения геомагнитного поля | 1985 |
|
SU1294135A1 |
| Способ измерения геомагнитного поля | 1985 |
|
SU1294135A1 |
| 0 |
|
SU152965A1 | |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИНДУКЦИИ ГЕОМАГНИТНОГО ПОЛЯ С ПОДВИЖНОГО ОБЪЕКТА | 2002 |
|
RU2206109C1 |
| Способ получения олигомеров этилена | 1985 |
|
SU1351912A1 |

