Область техники, к которой относится изобретение
Изобретение относится к ассистирующим хирургическим комплексам для проведения минимально инвазивных хирургических операций. Более конкретно, изобретение относится к способу управления камерой в системе компенсации контроллера оператора для управления роботохирургическим комплексом. Изобретение возможно использовать в различных областях, где необходимо визуально взаимодействовать с рабочим полем, находящемся в труднодоступном для оператора месте: медицинская робототехника, промышленные манипуляторы, взаимодействие с объектами в опасных для жизни оператора средах и другое.
Предпосылки создания изобретения
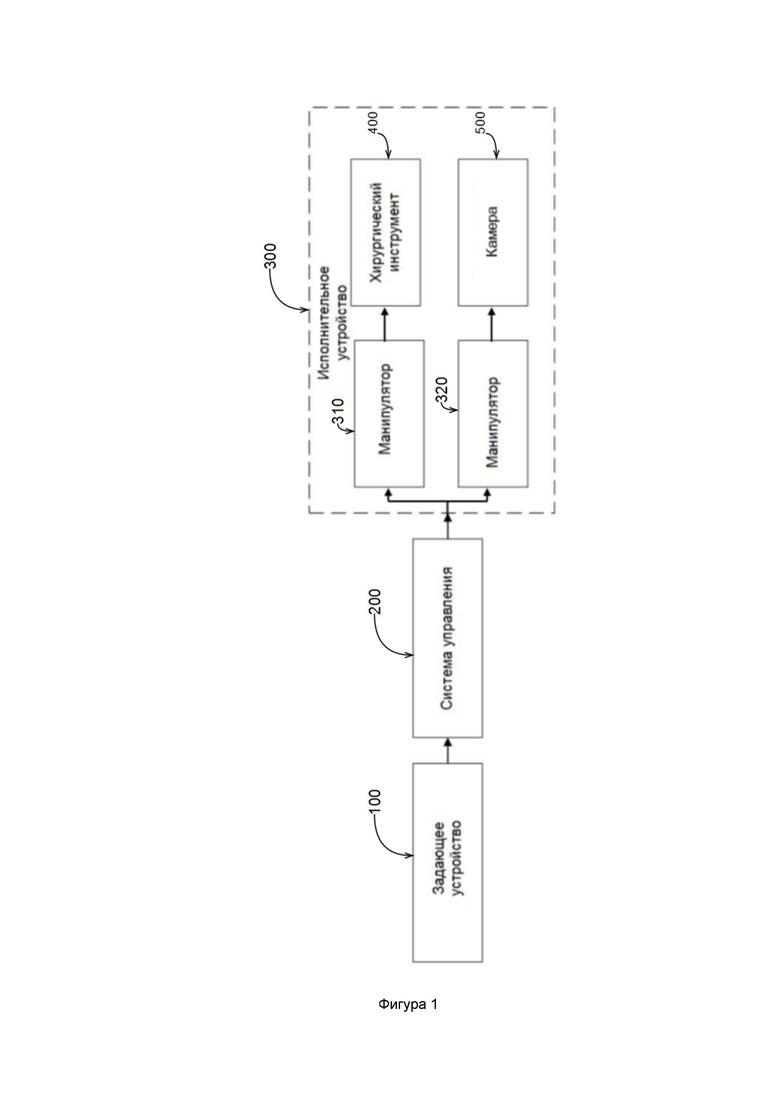
Роботохирургическая система представляет собой комплекс, состоящий из трех основных узлов, представленных на фигуре 1. Комплекс состоит из задающего устройства 100, системы управления 200 и исполнительного устройства 300. В качестве задающего устройства 100 выступают контроллеры управления, с которыми непосредственно взаимодействует хирург, - механизмы, воздействуя руками на которые, хирург генерирует по меньшей мере достаточные для проведения роботохирургической операции три поступательные и три вращательные движения. Исполнительными устройствами 300 являются манипуляторы 310, 320, на которые крепятся хирургические инструменты 400 и эндоскопическая камера 500, позволяющая передавать изображение операционного поля. Для отображения рабочего поля используется трехмерная система визуализации, которая транслирует изображение со стереоскопичекской камеры на 3D экран, расположенный перед хирургом, с эффектом реальной глубины. Взаимодействие всех устройств комплекса осуществляется при помощи системы управления 200, которая является центральным узлом системы.
Эндоскопические камеры применительно к роботохирургии обеспечивают стереоскопическую визуализацию и являются одним из важных узлов робот-ассистирующего комплекса, так как обеспечивают передачу изображения операционного поля оперирующему хирургу. В области малоинвазивной хирургии особое внимание уделяется удобству управления камерой, в частности, интуитивно понятному взаимодействию хирурга с исполнительным устройством.
Роботохирургия выгодно отличается от лапароскопии тем, что управление камерой осуществляется непосредственно оперирующим хирургом (в лапароскопии для данной функции часто привлекается ассистент).
Контроллер может по команде хирурга управлять или манипулятором с инструментом или манипулятором с камерой. Хирургу при этом достаточно при помощи педали переключать контроллер с управления инструментом на управление камерой.
Главной проблемой в управлении камерой является то, что она работает в сферической системе координат, а управляющие ею контроллеры - в декартовой системе координат. Если во время операции необходимо выдерживать постоянный размер и сохранять выбранный масштаб операционного поля, то при повороте камеры необходимо выполнить ее дополнительное компенсирующее перемещение вдоль оси направления зрения: приближение или удаление - в зависимости от того, в какую сторону камера поворачивается. Традиционно эту процедуру вынужден выполнять хирург. Но для ее качественного выполнения необходимы как значительный опыт хирурга, так и умение хирурга переключать «в уме» декартовую систему координат на сферическую и обратно. Такие условия приводят к значительной потере времени, повышению вероятности совершения ошибки хирургом и полностью закрывают возможность автоматизации отдельных переходов хирургической операции.
Возможность автоматической компенсации положения камеры при ее управлении контроллером является важной и пока не решенной задачей в роботохирургии. Решение этой задачи позволит автоматически совмещать декартову и сферическую системы координат и автоматически контроллером и/или манипулятором отрабатывать необходимые компенсационные движения, тем самым обеспечивая хирургу удобный, интуитивно понятный порядок управления.
В этой связи важными, а порой и определяющими для работы робот-асситирующего комплекса в целом, являются выбранные методы и способы управления камерой, передающей стереоизображение оператору. Связано это в первую очередь с необходимостью внедрения системы компенсации контроллера оператора, в которой будет программно реализован способ интуитивно понятного интерфейса взаимодействия хирурга с манипулятором, на который крепится эндоскопическая камера.
Взаимодействие хирурга с камерой отличается от управления хирургическими инструментами. Обусловлено это количеством степеней свободы: для управления камерой достаточным является управление тремя поступательными степенями свободы, а для контроля инструмента к ним добавляются три вращательные степени браншей (кончика) инструмента.
Различия в локальных системах координат задающего (контроллер) и исполнительного (манипулятор) устройств, которые объясняются механическими особенностями конструкций, являются незначительными при управлении хирургическим инструментом, но они же являются источником разногласия, которое не позволяет хирургу интуитивно, без когнитивной коррекции, взаимодействовать с камерой. Хирургу приходится понимать и помнить при работе, что при управлении камерой изменение ее положения будет происходить не совсем по тем траекториям, которые он задает. Это приводит к тому, что для эффективного управления камерой хирургу необходимо дополнительно освоить профессиональные навыки, на приобретение и закрепление которых потребуется значительный период времени. Интуитивно понятное управление - это управление камерой, основанное на том же самом порядке движений, что и в случае управления хирургическими инструментами.
Расхождения при управлении контроллером перемещения инструмента и камеры незначительны при проведении хирургических процедур при очень близком приближении к оперируемой области, но в случае процедуры осмотра операционного поля на некотором расстоянии расхождения становятся уже существенны, что вынуждает хирурга совершать дополнительные перемещения камеры для их компенсации. Недостаточная квалификация хирурга или отсутствие у него должного опыта по компенсации положения камеры может создать проблемы, связанные с потерей во время операции операционного поля или по неадекватному восприятию его местоположения и размеров. Компенсация положения камеры становится ключевой задачей при автоматизации отдельных переходов хирургической операции.
Существуют методы управления камерным манипулятором, которые направлены на решение описанных выше проблем. Например, такие методы раскрыты в патентах США US 6574355 B2, US 9188973 B2, US9949798B2.
В способе, описанным в US 6574355 B2. производится программная и аппаратная компенсация при движении камеры. Изменение видимого положения наконечников манипулятора улучшает удобство управления оператора при работе с объектом в рабочей области. Но данная компенсация направлена на корректировку поля зрения камеры и отвечает за синхронное расположение хирургических инструментов на изображении с камеры. Само поступательное движение камеры при переходе от системы координат контроллера управления в систему координат манипулятора никоим образом не компенсируется.
В способе, описанным в US 9188973 B2, используют алгоритм определения координат манипулятора робота на основе его местоположения в системе координат камеры. Данные преобразования координат облегчают калибровку систем камер. Использование предложенных методов позволяет точнее позиционировать всю систему, а также управлять камерой в зависимости от решаемой задачи. Однако компенсация движения камеры при изменении положения отсутствует.
В US 9949798 B2 представлен способ управления камерой, в котором используются различные локальные системы координат для контроллера управления как задающего устройства и манипулятора камеры как исполнительного устройства, что позволяет переходить из одной системы координат в другую при управлении и реализовывать отдельные методы управления камерой в рамках операционного поля. При этом в данном техническом решении не уделяется особое внимание тонкостям управления и взаимодействия, предполагается прямолинейный переход из одной системы координат в другую без внедрения каких-либо методов механической либо программной компенсации для особых случаев и режимов управления камерой. Для предложенного способа взаимодействия и управления камерой хирургу необходимо дополнительно обучаться и привыкать, так как данные движения не интуитивны и требуют определенных навыков управления.
Обзор современных решений, а также имеющихся научных исследований в области роботизированных хирургических комплексов, в частности программных или аппаратных способов компенсации перемещений, приводит к выводу о существовании потребности в создании усовершенствованной системы взаимодействия хирурга с робот-ассистирующим комплексом. Существующие разработки методов и систем для управления движением камерой в составе роботохирургических комплексов не позволяют решить следующую совокупность проблем:
1. Отсутствие интуитивно понятного взаимодействия хирурга с камерой при ее перемещении, обеспечивающего удержание изображения операционного поля в рамках заданного поля зрения. Такое свойство системы, как интуитивно понятное управление системой, снимает с хирурга обязанность постоянно контролировать, рассчитывать в уме и на основе расчетов совершать дополнительные компенсационные перемещения контроллером при перемещении камеры.
2. Отсутствие программных либо механических методов компенсации управления камерой при проведении роботохирургической операции, избавляющих хирурга от дополнительных управляющих команд для перемещения камеры с целью удержания изображения на целевой точке операционного поля.
3. Отсутствие программных методов компенсации расхождений между средней линией кадра и линией горизонта при наличии данной технической возможности у конструкции манипулятора.
4. Отсутствие масштабирования движений контроллером при разном отдалении расположенного в теле пациента конца стереоскопической камеры от «нулевой точки» (точки входа камеры в тело пациента).
5. Необходимость приобретения определенных навыков управления камерой для понимания работы существующих систем визуализации в роботохирургических комплексах.
Таким образом, существует потребность в усовершенствовании метода компенсации поступательных движений в режиме управления камерой для того, чтобы обеспечить хирургу возможность более интуитивно понятного и комфортного управления роботохирургическим комплексом, и для того, чтобы обеспечить более совершенное взаимодействие с комплексом, что в свою очередь повышает качество и эффективность роботохирургических операций. Именно решению перечисленных проблем посвящена данная заявка.
Суть изобретения
Технической задачей, на решение которой направлено настоящее изобретение, является интуитивно понятное управление движением камерой для наблюдения операционного поля без необходимости освоения дополнительных навыков компенсаций при управлении, повышение качества и эффективности роботохирургических операций.
Технический результат настоящего изобретения заключается в создании способа взаимодействия контроллера управления с механическим манипулятором, входящим в состав роботохирургического комплекса, с закрепленной на нем камерой, позволяющего уменьшить или убрать совсем количество совершаемых хирургом компенсационных движений при управлении камерой, тем самым обеспечив сокращение продолжительности операции, уменьшение рисков ошибок хирурга, а также сокращение утомляемости хирурга на основе максимально интуитивно понятного порядка управления камерой.
Удобное и интуитивно понятное управление камерой достигается за счет исследованной, смоделированной и программно-реализованной системы, фиксирующей управляющие команды, сгенерированные в системе координат контроллера, и преобразующей их в управляющие команды, но уже в системе координат манипулятора камеры, что представляет собой мехатронно-программную компенсацию движения камеры.
Способ компенсации движений камеры включает в себя: обеспечение компенсации плоскости движения манипулятора камеры; обеспечение масштабирования движений контроллера управления; обеспечение нивелирования расхождения средней линии кадра и линии горизонта.
Предлагаемый способ управления движением манипулятора с закрепленным на нем камерой должен отвечать следующим требованиям:
1. Осуществление способа компенсации движения камеры должно увеличивать для хирурга интуитивность управления.
2. Скомпенсированное движение манипулятора должно точно воспроизводить положение камеры в операционной области в соответствии с управляющими командами контроллера управления хирурга.
3. Использование способов компенсации не должно уменьшать рабочую область хирурга в рамках операционного поля и должно позволять хирургу изменять поле обзора камеры в операционном поле с минимальным количеством управляющих движений контроллера управления.
Предлагаемый способ компенсации движения камеры позволит менять положение конца камеры в одной плоскости в зависимости лишь от глубины погружения камеры относительно «нулевой точки». Внедрение дополнительных способов компенсации расхождения средней линии кадра и линии горизонта позволят уменьшить недостатки, возникающие при изменении поля зрения камеры и адаптации хирурга к полученному результату. Описываемый ниже способ для управления перемещением камерным манипулятором контроллером управления выполнен с возможностью облегчения перемещения стереокамеры, визуализирующей хирургическую область, в операционном поле за счет компенсационного масштабирования движений контроллера. Способ предполагает управление камерой в системе координат, которая аналогична декартовой системе координат, применяемой для передвижения инструментов.
Точность воспроизведения управляющих команд гарантируется механическим манипулятором, к которому крепится камера, особенности конструкции которого в рамках данной заявки не рассматриваются, но гарантирующего по меньшей мере три поступательные степени свободы для камеры.
Точность определения изменения положения, а также генерацию управляющих команд гарантирует контроллер управления, обеспечивающего передачу изменения положения, по меньшей мере, в трех поступательных степенях свободы.
Технический результат достигается за счет создания способа управления движением камеры, закрепленной на манипуляторе роботохирургического комплекса, включающего два контроллера управления роботохирургическим комплексом, каждый из которых выполнен с возможностью оцифровывания движений рук хирурга и обеспечивающий передачу векторов движения по трем поступательным и трем вращательным степеням свободы, представляющих разность между координатами контроллера управления в начальном положении и координатами контроллера при изменении положения руки хирурга, при этом каждый контроллер управления выполнен с возможностью переключения в режим управления камерой с помощью педали управления, по меньшей мере один манипулятор с закрепленной на нем камерой для обзора операционного поля, обеспечивающий ее перемещение по трем поступательным степеням свободы, систему автоматического управления, которая связана с обоими контроллерами, управляемыми хирургом, и по меньшей мере одним манипулятором, при этом способ характеризуется следующими шагами:
передача данных векторов движения по трем поступательным и трем вращательным степеням свободы правого и левого контроллера управления в систему автоматического управления с постоянной частотой,
осуществление переключения контроллеров управления в режим управления камерой, закрепленной на манипуляторе, путем нажатия на педаль управления, при этом сигнал с педали управления передают в систему автоматического управления и на контроллеры управления для блокировки у последних вектора движения вращательных степеней свободы, причем после блокировки вращательных степеней свободы контроллера управления вектор вращательных координат в системе автоматического управления обнуляется;
осуществление управления движением манипулятора с закрепленной на нем камерой посредством одновременного перемещения контроллеров управления и последующего выполнения следующих этапов:
этап сохранения полученных векторов движения контроллеров управления в системе автоматического управления,
этап обработки и объединения векторов движения правого и левого контроллера управления, характеризующих поступательные движения, для нахождения суммарного перемещения,
этап масштабирования полученного на предыдущем этапе вектора перемещения,
этап компенсации движения, содержащий суммирование отмасштабированного вектора перемещения и вектора текущего положения указанного манипулятора в его локальной декартовой системе координат, и перевод полученного вектора положения манипулятора из декартовой в сферическую систему координат,
этап компенсации отклонения линии горизонта от средней линии кадра путем вычисления величины расхождения угла, зависящего от углов наклона камеры в сферической системе координат,
этап одновременной передачи полученных на предыдущих шагах данных на исполнительные механизмы манипулятора для его поступательного перемещения и поворота вокруг продольной оси закрепленной на нем камеры.
При этом масштабирование вектора перемещения осуществляют с учетом отдаления камеры от нулевой точки камеры в локальной системе координат камеры, относительно которой изменяет свое положение вектор положения камеры с началом в точке вхождения камеры в отверстие в теле пациента и с концом, совпадающим с фактическим положением конца камеры.
Краткое описание чертежей
Прилагаемые чертежи, которые включены в состав настоящего описания и являются его частью, иллюстрируют вариант осуществления изобретения и совместно с вышеприведенным общим описанием изобретения и нижеприведенным подробным описанием примеров осуществления изобретения служат для пояснения принципов настоящего изобретения. Для ясности и просты приведенные чертежи не обязательно выполнены в масштабе.
Фигура 1 изображает структурную схема робот-ассистирующего комплекса.
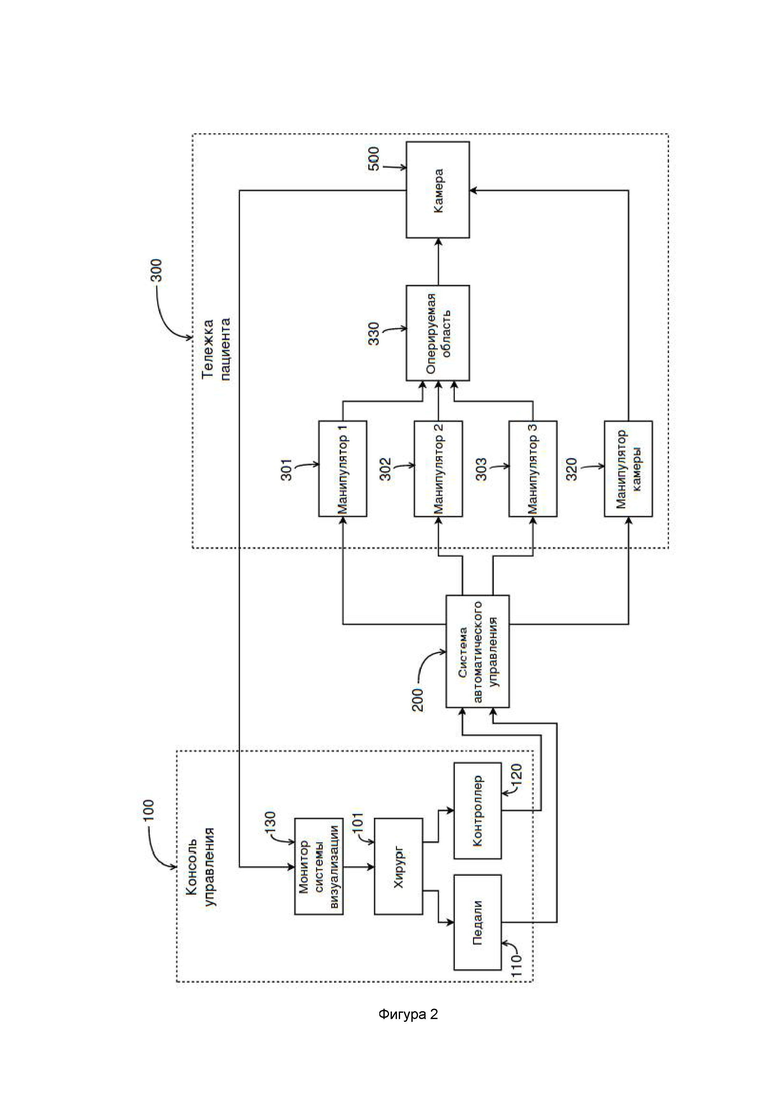
Фигура 2 изображает структурную модель роботохирургического комплекса, которая применяется для настоящего изобретения.
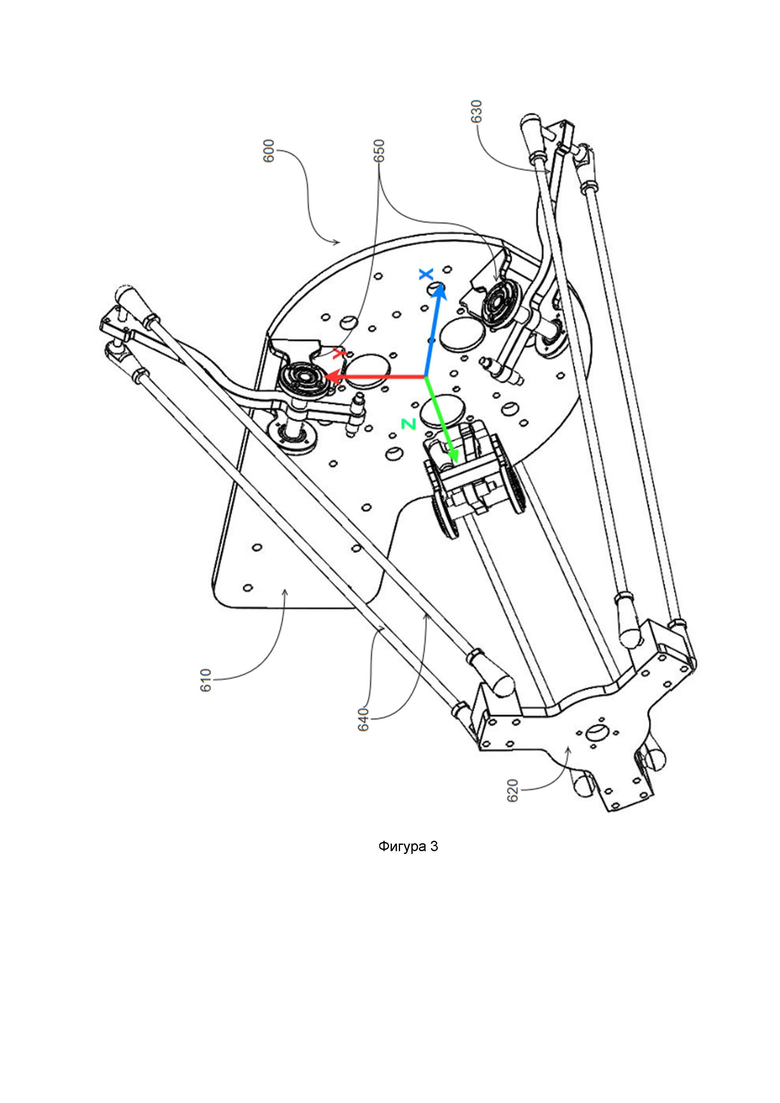
Фигура 3 изображает общий вид контроллера управления хирурга, который используется в настоящем изобретении.
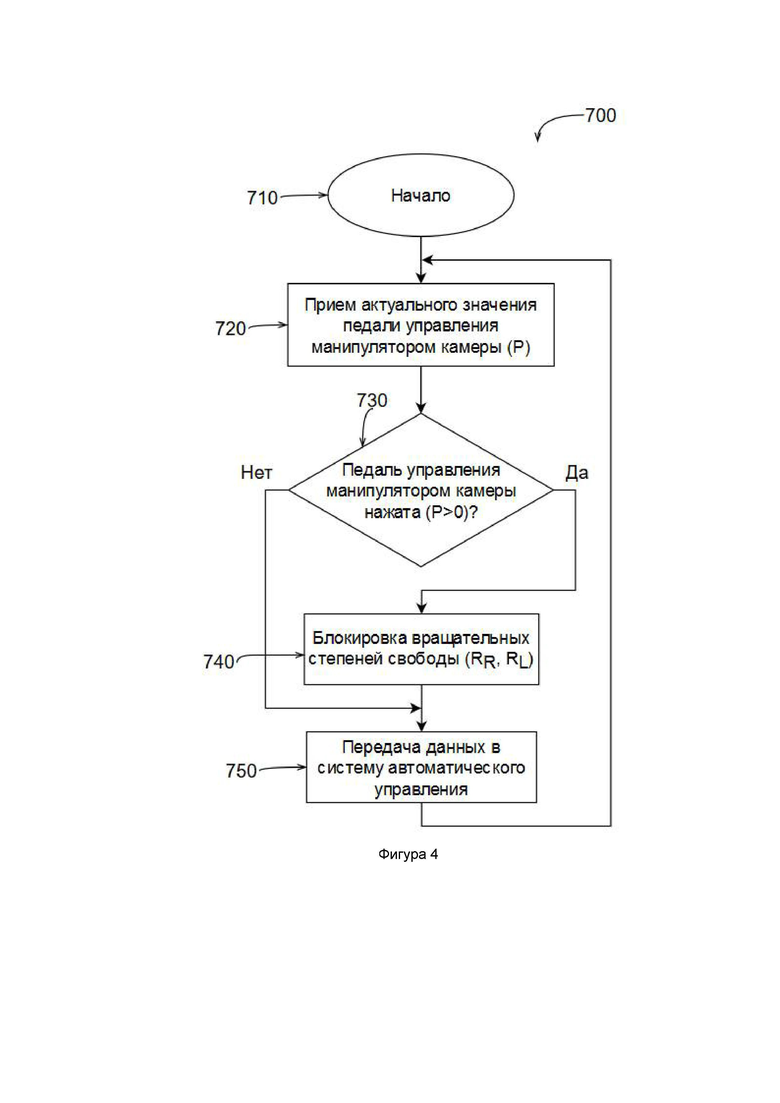
Фигура 4 изображает общую принципиальную блок-схему алгоритма работы контроллера управления хирурга.
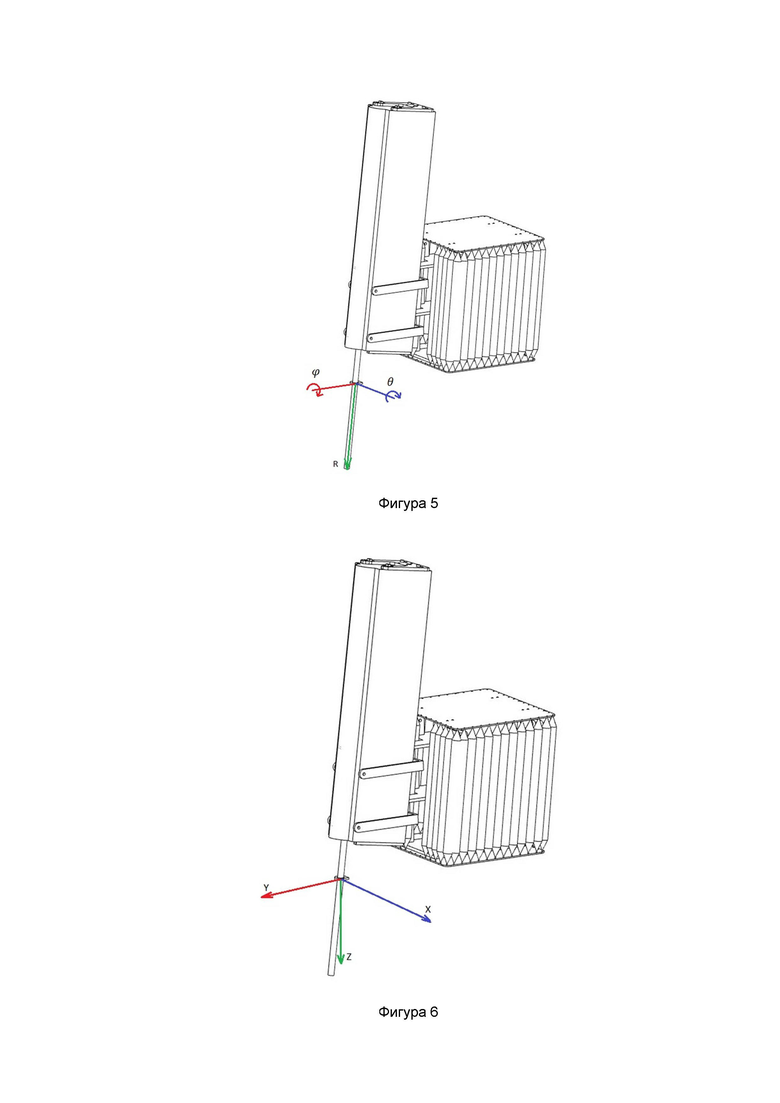
Фигура 5 изображает расположение локальной сферической системы координат манипулятора, берущей начало в «нулевой точке».
Фигура 6 изображает расположение декартовой ортогональной системы координат манипулятора с началом в «нулевой точке».
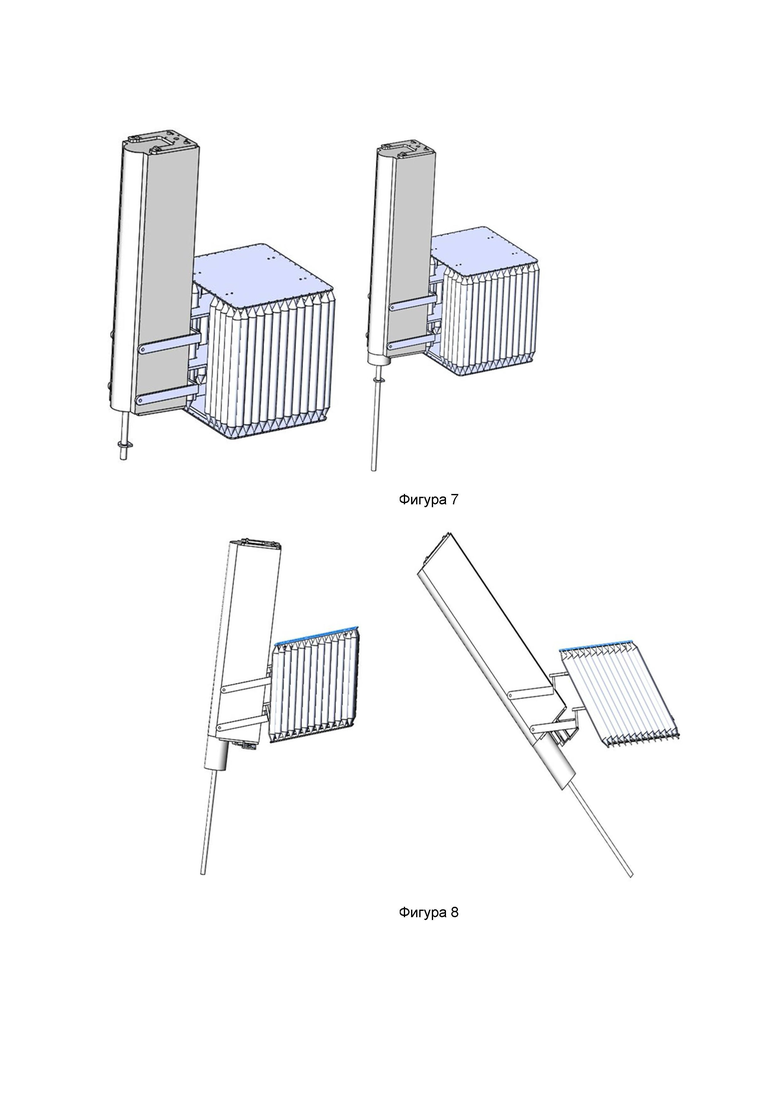
Фигура 7 изображает моделирование изменения положения конца камеры при изменении каждой координаты в отдельности. Изменение длины камеры относительно «нулевой точки».
Фигура 8 изображает моделирование изменения положения конца камеры при изменении каждой координаты в отдельности. Изменение наклона камеры относительно продольной оси.
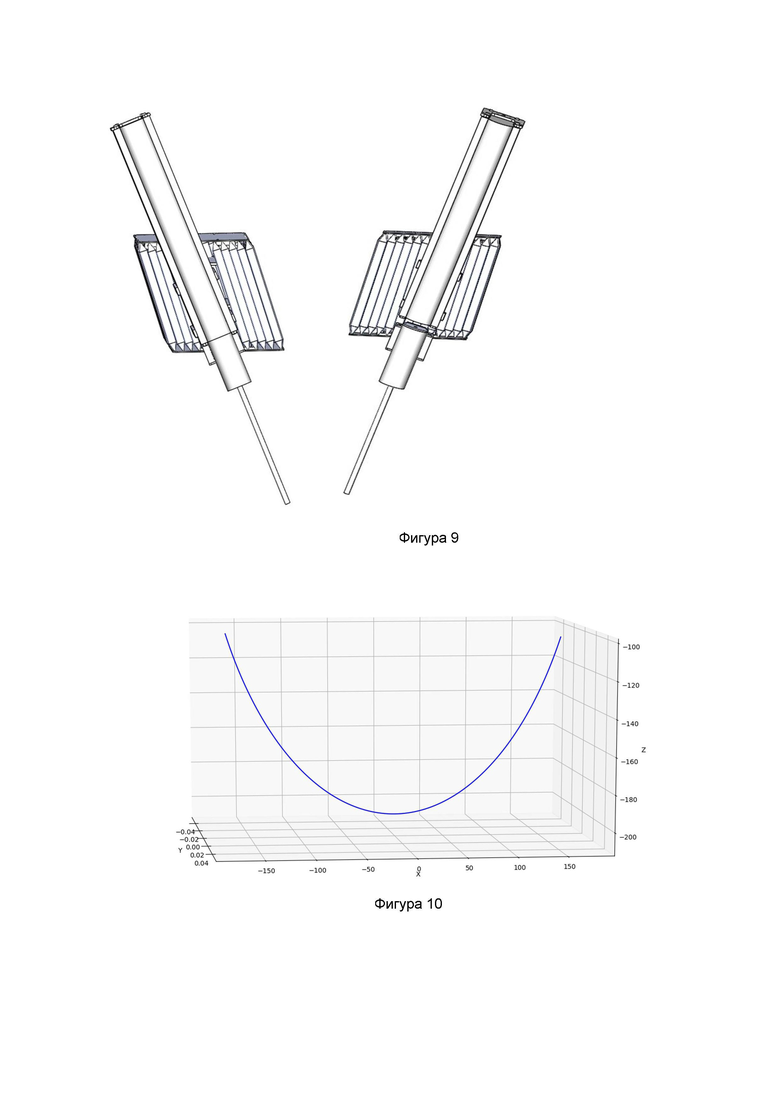
Фигура 9 изображает моделирование изменения положения конца камеры при изменении каждой координаты в отдельности. Изменение наклона камеры относительно поперечной оси.
Фигура 10 показывает траекторию движения камерного манипулятора при изменении угла  вдоль продольной оси при постоянных
вдоль продольной оси при постоянных  . Движение осуществляется по окружности с радиусом
. Движение осуществляется по окружности с радиусом  .
.
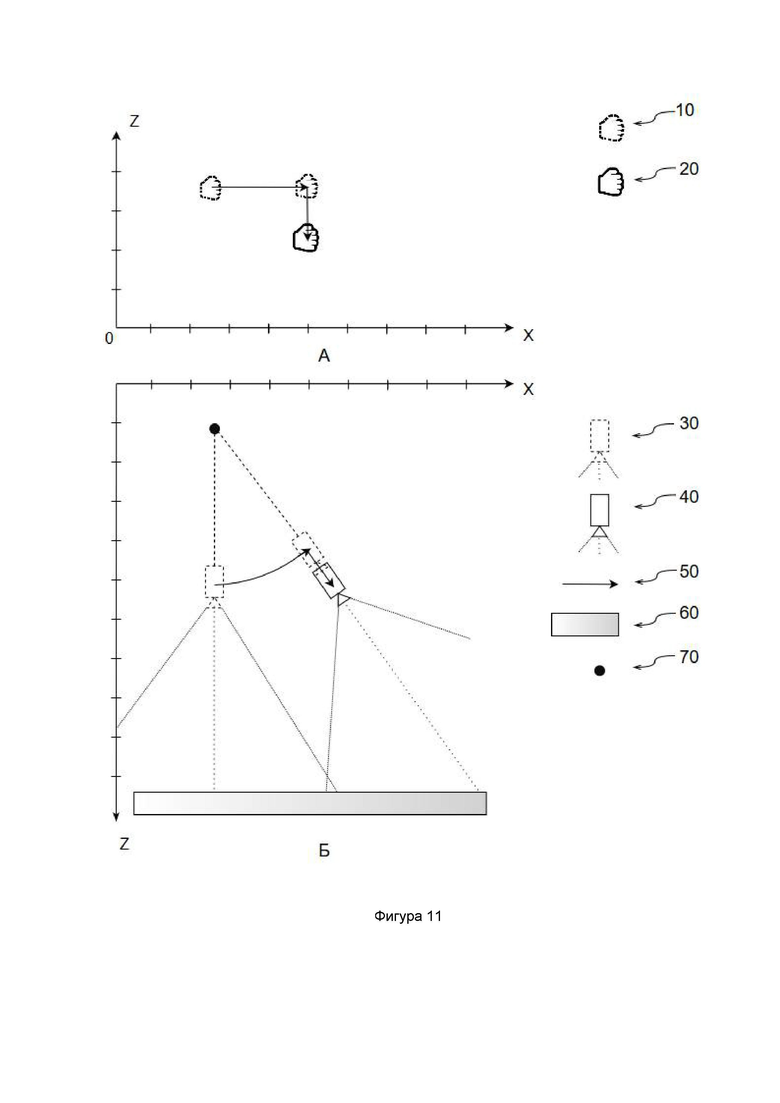
Фигура 11 схематично показывает соотношения между перемещениями контроллера управления хирурга и движением манипулятора камеры в декартовой системе координат. На фигуре 11А схематически приведены перемещения руки хирурга в декартовой системе координат контроллера управления. Перемещение камеры в декартовой системе координат манипулятора камеры отображено на фигуре 11Б.
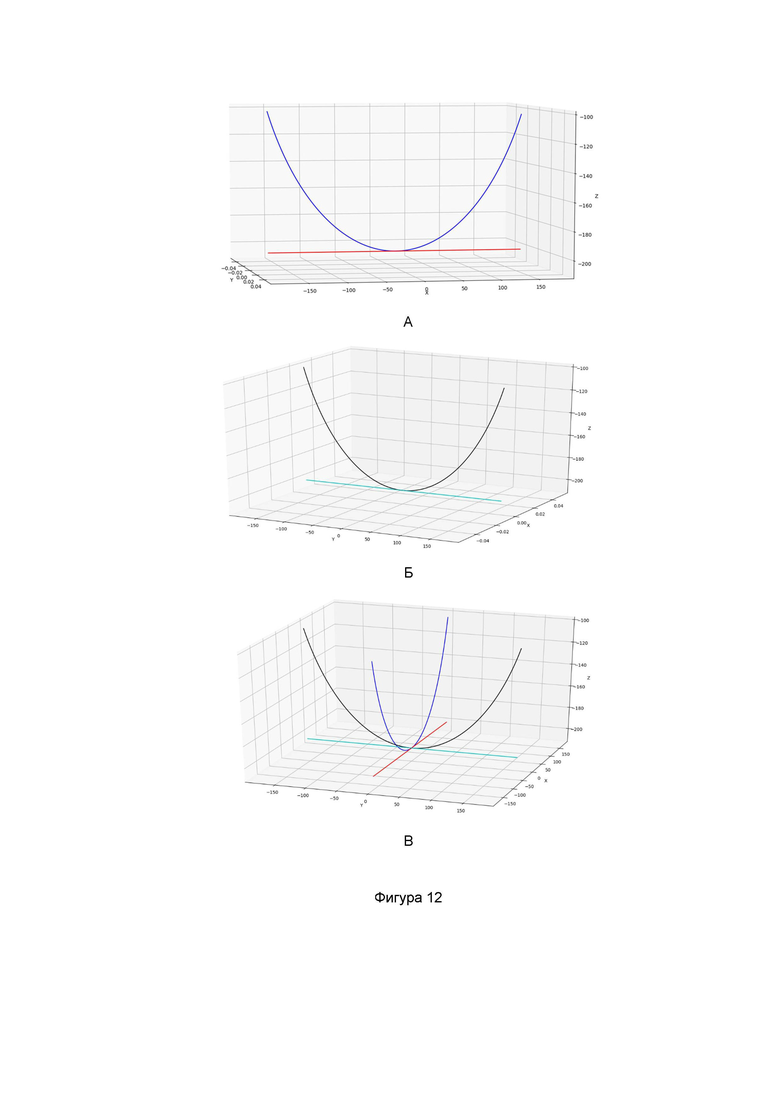
Фигура 12 отражает траектории движения кончика камеры в декартовой системе координат камеры и скомпенсированный вид данный траектории после применения предлагаемого алгоритма компенсации движения камеры. Фигуры 12А, 12Б и 12В показывают траектории движения кончика камеры при различных ее движениях.
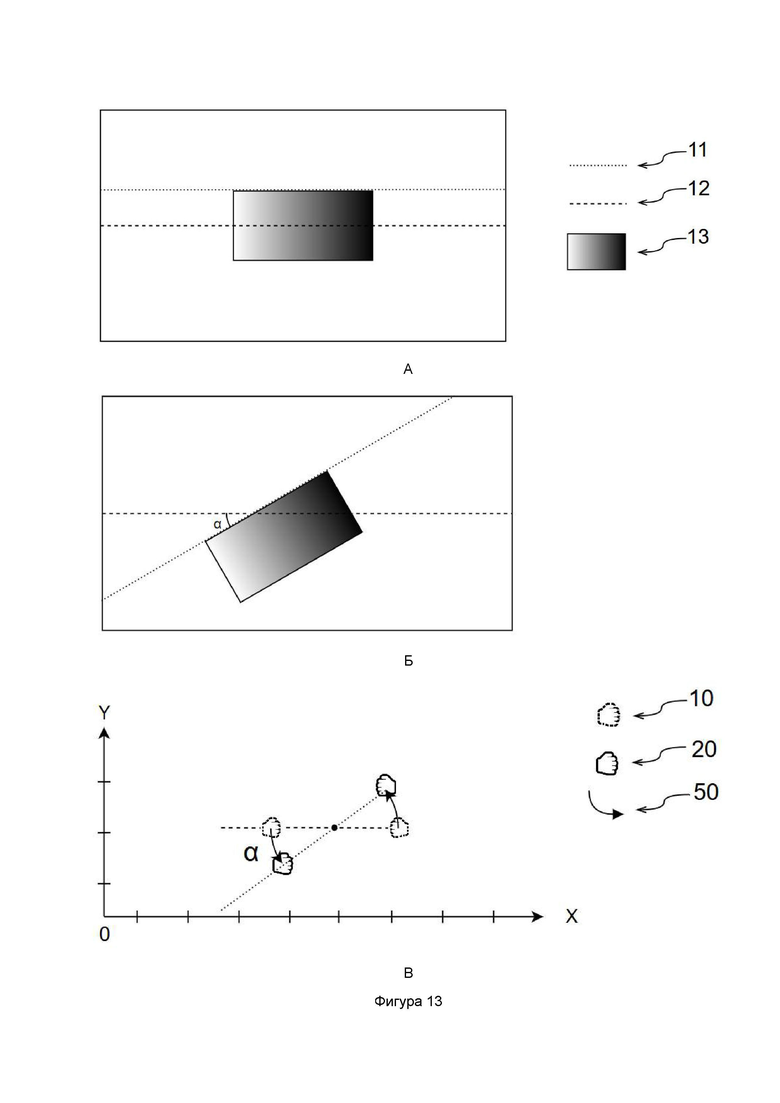
Фигура 13 отражает совершаемое движение контроллером управления хирурга и отклонение средней линии кадра от линии горизонта. Фигура 13А показывает изображение в кадре при нулевом угле наклона манипулятора камеры. Фигура 13Б показывает изображение в кадре при положительном угле наклона манипулятора камеры. Фигура 13В отражает необходимое движение рук оператора для восстановления линии горизонта в декартовой системе координат контроллера.
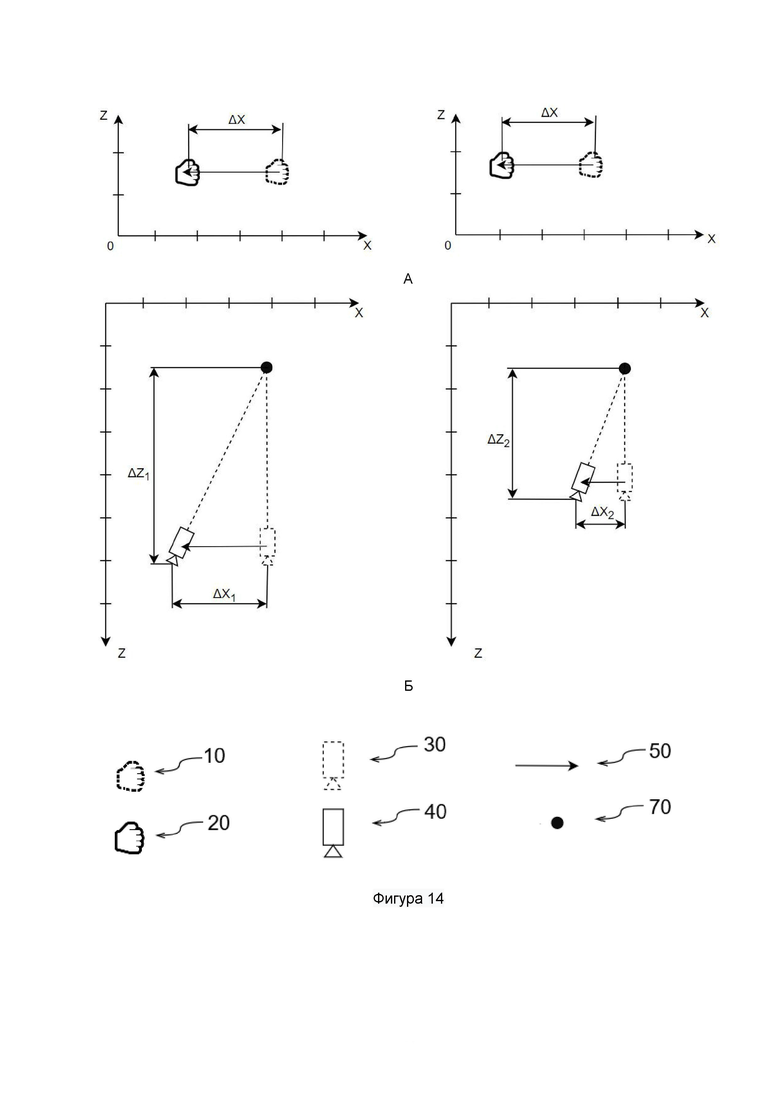
Фигура 14 схематично отражает алгоритм изменения масштаба камерного манипулятора.
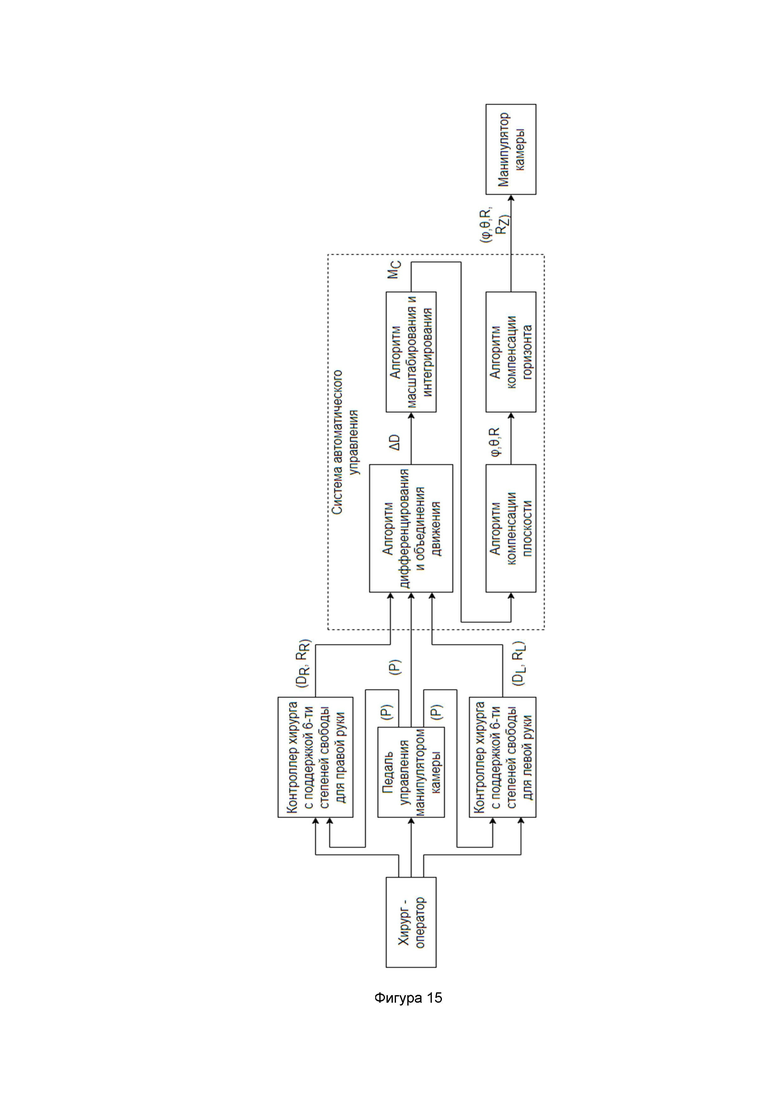
Фигура 15 схематично отражает подробную функциональную схему управления камерой.
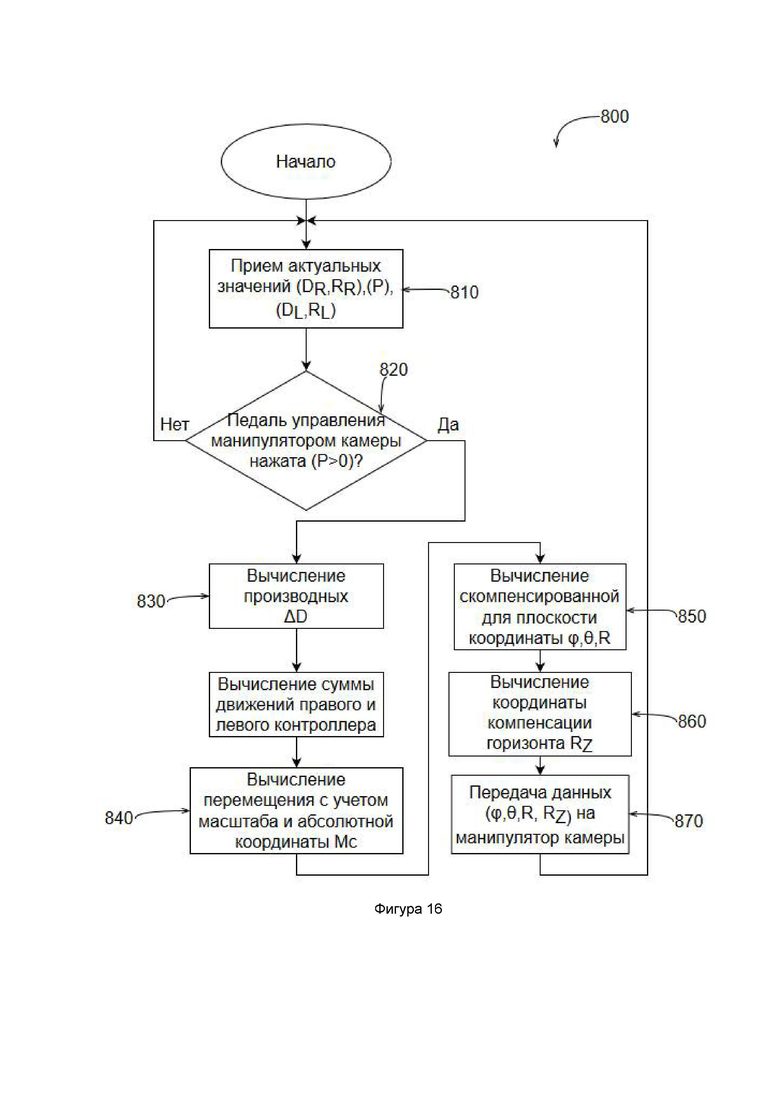
Фигура 16 отражает блок-схему алгоритма работы системы автоматического управления манипулятором камеры.
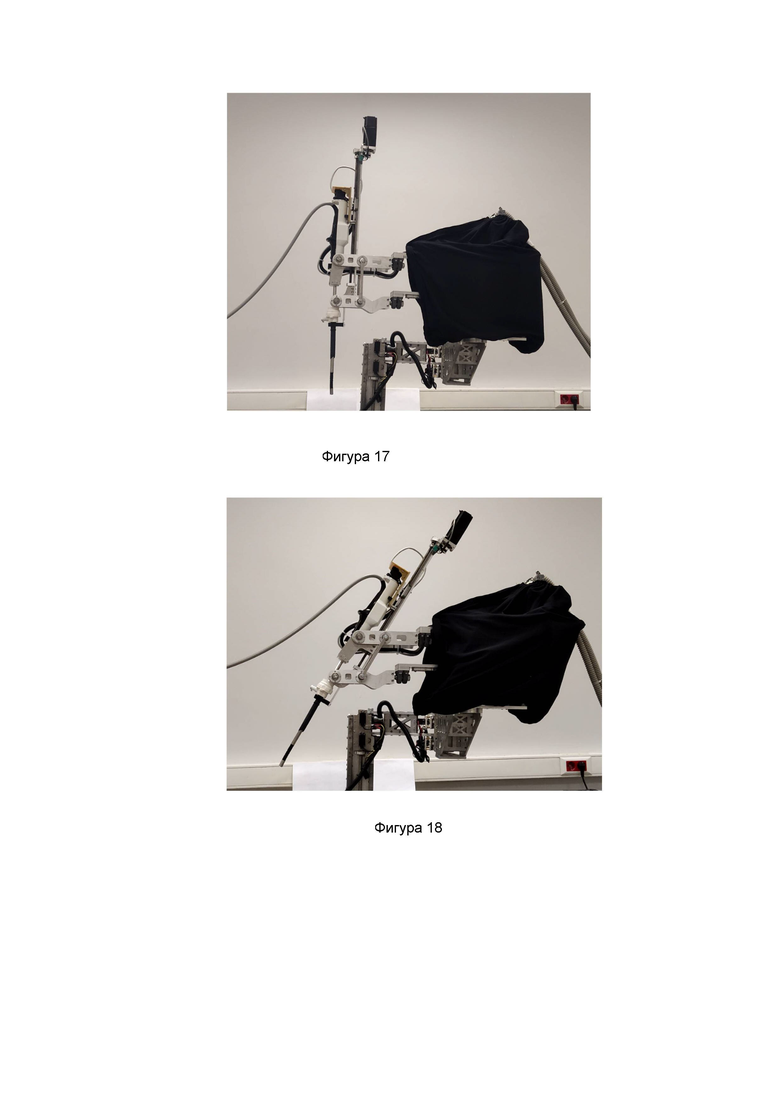
Фигура 17 изображает манипулятор камеры в сферических координатах 
Фигура 18 изображает манипулятор камеры в сферических координатах 
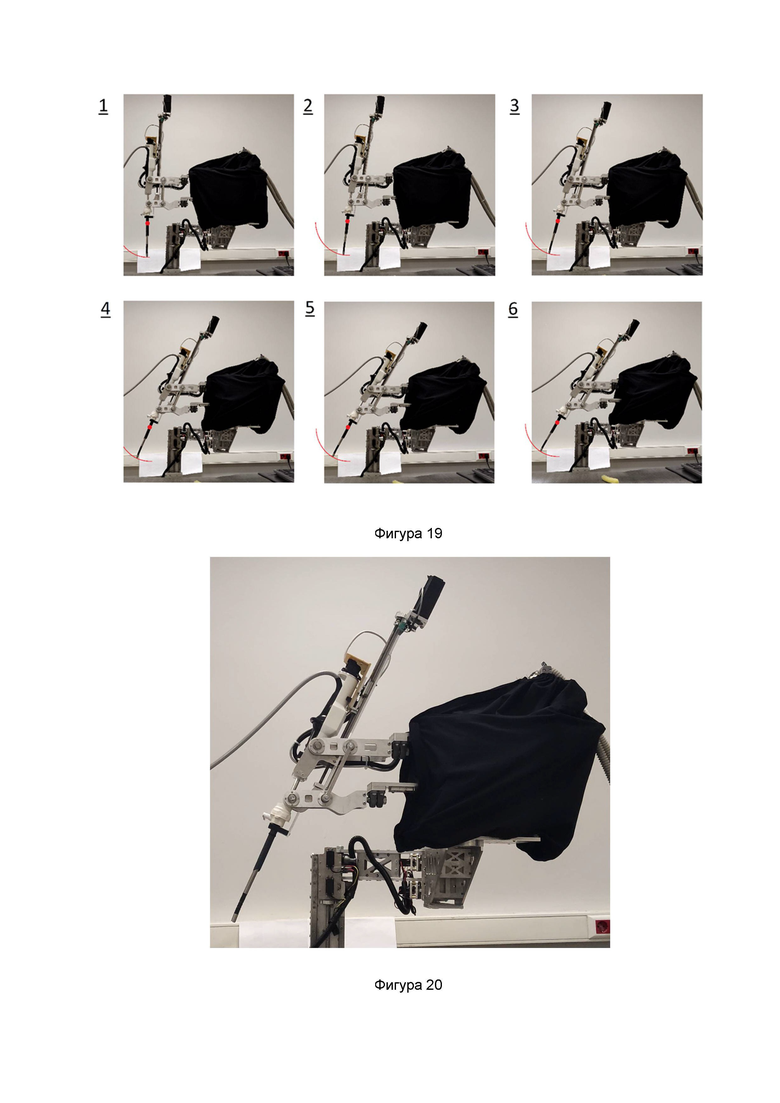
Фигура 19 показывает последовательность движения манипулятора камеры без применения предлагаемого способа компенсации движения камеры (без применяемого алгоритма компенсации плоскости).
Фигура 20 изображает манипулятор камеры в сферических координатах 
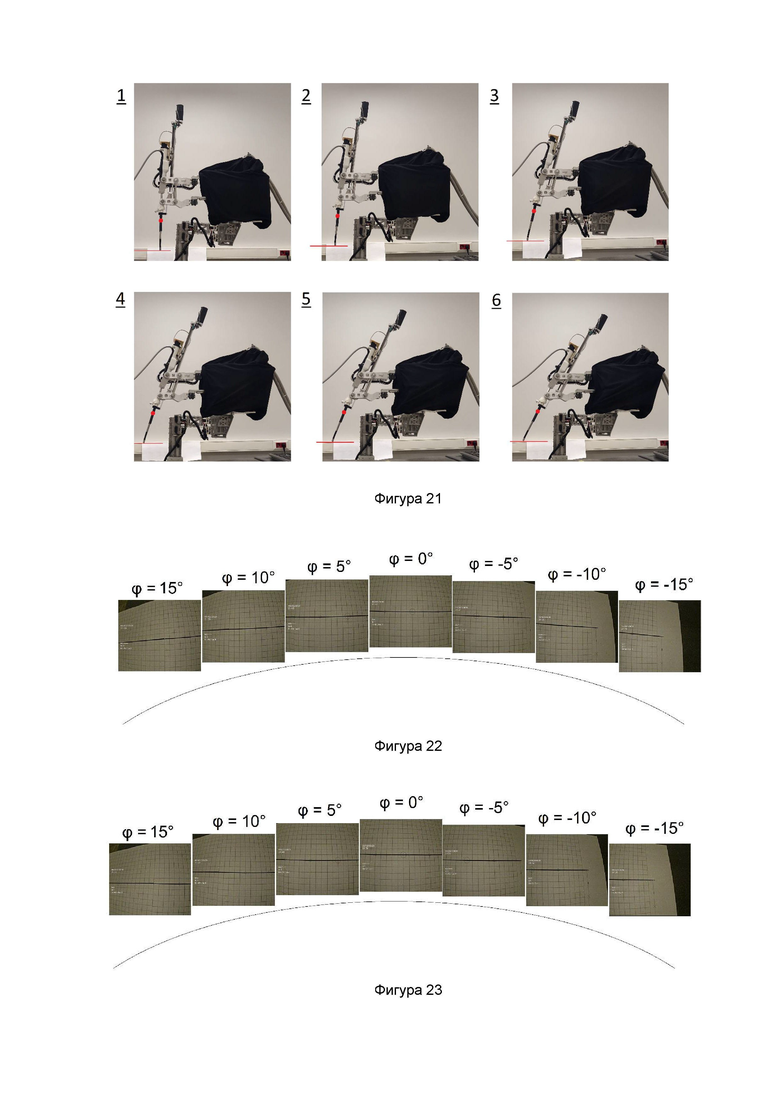
Фигура 21 показывает последовательность движения манипулятора камеры с применением предлагаемого способа компенсации движения камеры (с использованием применяемого алгоритма компенсации плоскости).
Фигура 22 показывает последовательность изображений вдоль проекции траектории без компенсации горизонта.
Фигура 23 показывает последовательность изображений вдоль проекции траектории с компенсацией горизонта.
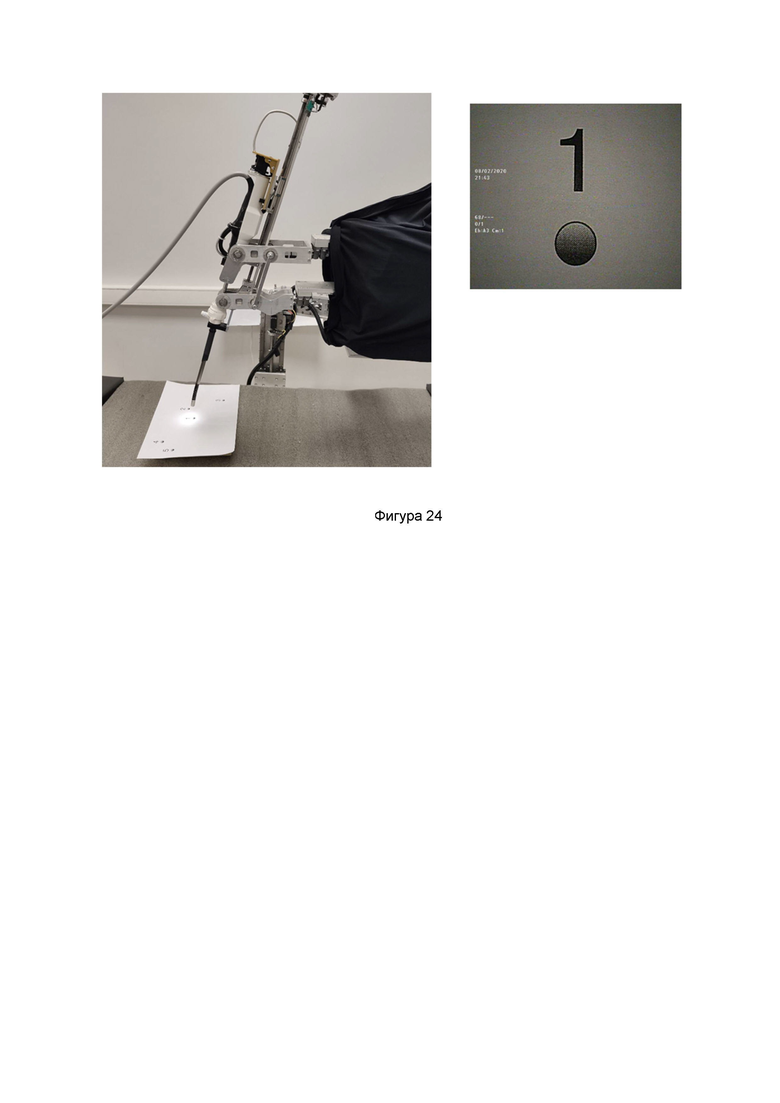
Фигура 24 изображает объект операционного поля с нанесенными контрольными точками (слева), изображение первой контрольной точки в кадре (справа).
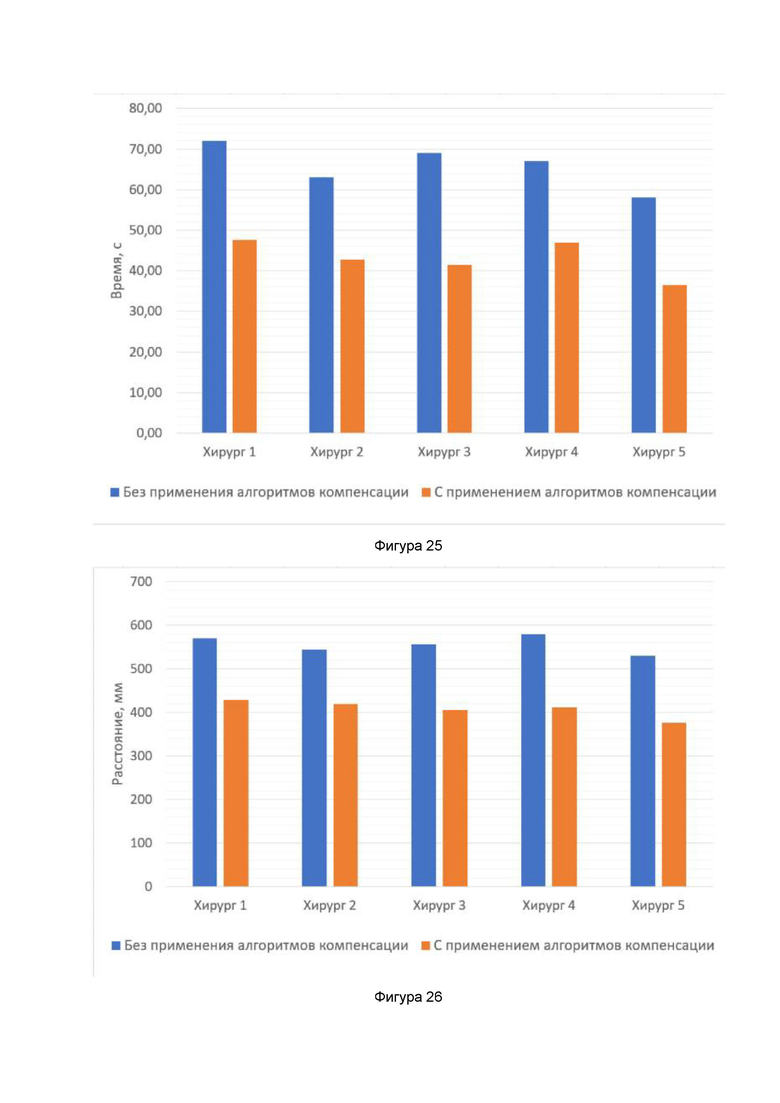
Фигура 25 показывает результаты серии экспериментов после статистической обработки данных, отражающих среднее время позиционирования камеры с применением предложенного способа управления движением камеры и без него.
Фигура 26 показывает результаты серии экспериментов после статистической обработки данных, отражающих среднее расстояние перемещения рук хирурга при позиционировании манипулятора камеры с применением предложенного способа управления движением камеры и без него.
Термины и определения
Для лучшего понимания настоящего изобретения ниже приведены некоторые термины, использованные в настоящем описании изобретения. Если не определено отдельно, технические и научные термины в данной заявке имеют стандартные значения, общепринятые в научной и технической литературе.
В настоящем описании и в формуле изобретения термины «включает», «включающий» и «включает в себя», «имеющий», «снабженный», «содержащий» и другие их грамматические формы не предназначены для истолкования в исключительном смысле, а, напротив, используются в неисключительном смысле (т.е., в смысле «имеющий в своем составе»). В качестве исчерпывающего перечня следует рассматривать только выражения типа «состоящий из».
В настоящих материалах заявки под терминами «роботизированный технологический комплекс», «роботизированная система», «роботизированный комплекс», «роботохирургический комплекс», «роботохирургическая система» понимают сложные системы или комплексы в хирургии с использованием робота-ассистента во время операции. «Робот-ассистивные системы» или «робот-ассистированные хирургические системы» - это роботизированные системы, предназначенные для проведения медицинских операций. Это не автономные устройства, робот-ассистивными системами при проведении операции управляют хирурги.
В настоящих материалах заявки под термином «мехатронный комплекс» или «мехатронная система» понимают комплекс или систему с компьютерным управлением движения, которые базируются на знаниях в области механики, электроники и микропроцессорной техники, информатики и компьютерного управления движением машин и агрегатов.
В настоящей заявке под термином «оператор» понимают производящего операции врача-хирурга. Признаки «оператор» и «хирург» в настоящем описании изобретения являются синонимами.
Термин «соединенный» означает функционально соединенный, при этом может быть использовано любое количество или комбинация промежуточных элементов между соединяемыми компонентами (включая отсутствие промежуточных элементов).
Кроме того, термины «первый», «второй», «третий» и т.д. используются просто как условные маркеры, не накладывая каких-либо численных или иных ограничений на перечисляемые объекты.
Подробное описание изобретения
Описание примерных вариантов осуществления настоящего изобретения, приведенное ниже, приводится исключительно в качестве примера и предназначено для иллюстративных целей и не предназначено для ограничения объема раскрываемого изобретения.
Настоящее решение относится к способу управления перемещением камерой, закрепленной на механическом манипуляторе роботохирургического комплекса, которая позволяет получить изображение операционного поля во время проведения хирургической операции.
Пример структуры роботохирургического комплекса приведен на фигуре 2. Роботохирургический комплекс состоит из трех взаимосвязанных основных узлов: тележка пациента (исполнительное устройство) 300, система автоматического управления 200 и консоль управления (задающее устройство) 100, которая получает команды от хирурга 101 для дальнейшего преобразования их в движение закрепленных в манипуляторе хирургических инструментов или для обеспечения генерации управляющих команд от хирурга для других блоков роботохирургического комплекса.
Также одним из важных узлов в роботохирургическом комплексе является система стереоизображения (система визуализации), которая включает камеру 500 для получения изображения операционного поля 330 и монитор системы визуализации 130 для отображения полученного от камеры трехмерного изображения операционного поля. От качества получаемого хирургом изображения зависит эффективность проводимой операции. Современное развитие мехатронных систем и постоянное совершенствование роботохирургии предъявляет новые требования к разрабатываемым устройствам системы визуализации.
Консоль управления 100 находится вне стерильной зоны хирургического блока и выполнена с возможностью управления: манипуляторами 301, 302, 303 с закрепленными на них хирургическими инструментами; манипулятором 320 с закрепленной на нем камерой 500; непосредственно самими хирургическими инструментами. В управлении участвует контроллер 120, управляемый руками хирурга, и педали, управляемые ногами хирурга.
Обычно манипуляторы с хирургическими инструментами и камерой смонтированы на тележке пациента, которая предназначена для их поддержки и расположения относительно пациента. Следует понимать, что роботохирургический комплекс может иметь любое число манипуляторов, так, например, один или более манипуляторов. На фигуре 2 показаны три манипулятора 301, 302, 303, выполненные с возможностью перемещения в трех плоскостях и вращения в трех плоскостях, а также манипулятор 320 камеры 500. Все манипуляторы, указанные на структурной схеме и являющиеся частью тележки пациента, обладают общими механическими характеристиками и конструкционным особенностями. Каждый манипулятор имеет корпус и соединительный узел манипулятора, к которому съемно может быть присоединен хирургический инструмент или камера, движение и положение которых имеет возможность изменять хирург, манипулируя/управляя с помощью контроллера управления, который оцифровывает движение руки хирурга.
Контроллер управления 120 хирурга позволяет управлять хирургическими инструментами и камерой, расположенных внутри пациента при проведении хирургической операции. Контроллер управления преобразует механические движения руки хирурга на всей естественной амплитуде движений по шести степеням свободы для генерирования управляющих команд для роботохирургического комплекса.
Контроллер управления хирурга формирует команду на перемещение хирургического инструмента. Дополнительно контроллер выполняет управление поворотами и открытием-закрытием бранша на хирургическом инструменте. Хирург имеет возможность генерировать по меньшей мере три поступательные и три вращательные степени свободы и дополнительно как минимум одну степень свободы при смыкании/размыкании браншей, что достаточно для управления хирургическим инструментом при выполнении хирургической операции.
Под педалью 110 в настоящей заявке понимают контактный коммутационный аппарат (механический или электронный), способный включать/выключать прохождение тока в цепи. В качестве такого аппарата может выступать педаль, кнопка, выключатель, переключатель и тому подобное. Здесь и далее в рамках настоящей заявки педалью 110 является ножной педальный выключатель, который замыкает электрическую цепь при нажатии хирургом на педаль ногой. В составе консоли управления педалей может быть несколько. Педали предназначены для смены режимов работы контроллера управления либо для переключения дополнительного функционала, например, коагуляции, лазера и тому подобное. Ножные педальные выключатели позволяют хирургу управлять камерой, инструментами, электрохирургическими инструментами.
Система автоматического управления 200 на основе полученных данных от контроллеров управления 120 и сигнала с педалей 110 генерирует управляющие команды, которые могут быть направлены как на манипуляторы 301, 302, 303 с хирургическими инструментами, так и на манипулятор 320 камеры. Нажатие и удерживание ножного выключателя 110 отключает контроллеры управления 120 от управления хирургическими инструментами (от управления манипуляторами 301, 302, 303 с хирургическими инструментами) и включает и позволяет выполнить управление движением манипулятора 320 с камерой 500. В этом режиме оба контроллера 120, правый и левый, работают одновременно. Когда педаль 110 будет отпущена, контроллеры управления 120 опять будут управлять хирургическими инструментами. В этом случае система автоматического управления 200 получает от контроллера управления 120 данные о трех поступательных и трех вращательных степенях свободы и генерирует на их основе три поступательных и три вращательных перемещения манипулятора с хирургическим инструментом. При нажатой педали 110 управления камерой достаточным является генерирование трех поступательных степеней свободы. Таким образом, производится блокировка вращательных степеней свободы контроллеров управления 120.
Изображение оперируемой области, транслируемое стереоскопической камерой 500, доступно хирургу на мониторе 130 системы визуализации.
В качестве контроллера управления предполагается использование механической конструкции 600 с параллельной структурой, вид которой приведен на фигуре 3. Данная конструкция 600 позволяет обеспечить по меньшей мере три поступательные степени свободы путем возвратно-поступательного движения механизма по трем взаимно ортогональным осям, указанным на фигуре 3, которые являются достаточными для управления манипулятором камеры в составе роботохирургического комплекса. Изображенный контроллер управления 600 состоит из по меньшей мере двух платформ: неподвижной опорной 610 и подвижной 620, - и параллельной структуры, выполненной, предпочтительно, на основе механизма типа «дельта» (дельта-робота или дельтапода), а также приводного механизма, который приводит в движение дельта-робот, обеспечивая при этом минимальный люфт.
Дельта-робот состоит из трех рычагов 630, расположенных под углом 120º относительно друг друга и прикрепленных к опорной платформе 610. Преимуществом конструкции дельта-робота является использование параллелограммов, содержащих штанги 640 постоянной длины, расположенные попарно параллельно и соединенные между собой с помощью карданных шарниров. Параллелограммы одним концом соединены за соответствующие рычаги 630, а вторым концом связаны с подвижной платформой 620. Такая конструкция позволяет сохранять пространственную ориентацию механизмов робота. При этом подвижная платформа 620 всегда расположена параллельно опорной платформе 610. Соединение рычагов 630 с опорной платформой 610 производится через верхние подшипниковые узлы 650, чтобы обеспечить необходимые углы для исходного состояния дельта-робота. Верхние подшипниковые узлы 650 закреплены на опорной платформе 610. Установленные на верхние подшипниковые узлы 650 рычаги 630 на центрах соединения образуют равносторонний треугольник, углы которого влияют на размер полезной рабочей области дельта-робота. Увеличивая длину рычага, увеличивается ход по оси Z. Размеры при перемещении по осям X и Y задаются параллелограммами.
Для управления тремя вращательными степенями свободы к подвижной платформе 620 контроллера управления 600 крепится ручка, реализованная одним из любых известных способов. В рамках данной заявки конструкция подобной ручки не рассматривается.
Использование параллельной структуры обеспечивает высокую точность позиционирования, уменьшает нагрузку на руки оператора, увеличивает диапазон перемещения рук и сводит к минимуму ограничения на способность хирурга манипулировать хирургическими инструментами, включая камеру.
Воспроизведение команд от контроллера управления в непосредственные перемещения камеры осуществляется механическим манипулятором, который способен осуществлять движение по меньшей мере в трех поступательных степенях свободы и обеспечивать вращение вокруг продольной оси устройства, на котором крепится камера (эндоскопа).
Блок-схема 700 алгоритма работы контроллера управления приведена на фигуре 4.
В начальный момент времени, на первом этапе работы 710, хирург садится за консоль управления и начинает взаимодействие с контроллерами управления (с левым и с правым),
На втором этапе работы 720 принимают актуальное значение педали управления P.
На третьем этапе работы 730 осуществляют сравнение управляющего сигнала P от педали с нулевым значением для определения режима работы контроллера управления.
В режиме работы хирургическими инструментами, когда педаль отпущена (на систему автоматического управления поступает управляющий сигнал P от педали, равный нулю), каждый контроллер управления хирурга с постоянной частотой передает данные о трех поступательных и трех вращательных степенях свободы в систему автоматического управления (этап 750). Данные можно представить в виде двух различных векторов:


В режиме управления манипуляторами с хирургическими инструментами с контроллеров в систему автоматического управления поступают пакеты с шестью координатами.
При нажатии на педаль, отвечающую за переключение в режим управления манипулятором камеры, в случае, если на этапе 730 управляющий сигнал с педали отличен от нуля, то вращательные степени свободы на правом и левом контроллере блокируются (этап 740), оставляя возможность лишь для поступательных перемещений. Кроме того, сигнал с педали и данные о трех поступательных степенях свободы, поступаемые с контроллеров управления, передаются в систему автоматического управления (этап 750), тем самым уведомляя систему о начале управления манипулятором камеры.
Камера широко определяется в данной заявке как любое устройство, структурно сконфигурированное с возможностью формирования стереоизображения, будучи введенной в тело пациента. Изображение операционного поля может быть получено оптически с помощью волоконной оптики, объективов и миниатюризированных систем формирования изображений, например, с помощью видеоэндоскопа (далее – эндоскоп).
Камера вводится в организм через отверстие в теле пациента. Точка/плоскость входа определяется как «нулевая точка», поскольку все перемещения инструмента или камеры в теле пациента обеспечиваются двумя вращательными степенями свободы относительно этой точки и одной линейной степенью свободы. В «нулевой точке» располагается троакар для дополнительной фиксации инструментов и камеры. Также существует «нулевая точка камеры» в локальной системе координат камеры, относительно котороой изменяет свое положение вектор положения камеры с началом в «нулевой точке» и с концом, совпадающим с фактическим положением конца камеры. У камеры есть поле обзора, зависящее от характеристик объектива камеры. Камера передает изображение только той части операционного поля, которая попала в поле обзора.
Поле зрения камеры может иметь область, сконфигурированную для того, чтобы быть видимой камерой в любой момент времени.
Когда камера движется, область поля зрения перемещается вместе с камерой, что позволяет визуально обследовать операционную область. От особенностей перемещения камеры зависит и изменение области видимости. При этом хирургу должна быть гарантирована однозначность в понимании перемещения камеры и связанного с этим перемещения/изменения поля зрения в пределах операционного поля.
Особое внимание уделяется манипулятору, работа которого должна ориентироваться на некоторые особенности, которые возникают в силу специфики роботохирургии. Так как хирургические инструменты, а также стереокамера вводятся в тело пациента через отверстия, в которое вставляется троакар, то изменения положения осуществляются относительно «нулевой точки».
С целью упрощения математического аппарата и структуры системы автоматического управления локальная система координат манипулятора описывается сферической системой координат, перемещения в которой осуществляются углами φ,θ относительно «нулевой точки» вокруг продольной и поперечной осей, а так же радиуса выдвижения камеры R относительно «нулевой точки». Координаты (φ,θ,R) образуют локальную сферическую систему координат манипулятора.
Локальная система координат механического манипулятора может рассматриваться как изменение длины камеры , а также наклоны  в обе стороны относительно «нулевой точки» вокруг продольной и поперечной осей. Это достаточный набор координат, при помощи которого можно воспроизводить управляющие команды, сгенерированные для манипулятора камеры. Расположение локальной сферической системы координат с началом в «нулевой точке» показано на фигуре 5. На фигуре 5 изображен узел манипулятора, к которому крепится камера с помощью средств крепления с возможностью изменения ее ориентации и положения.
в обе стороны относительно «нулевой точки» вокруг продольной и поперечной осей. Это достаточный набор координат, при помощи которого можно воспроизводить управляющие команды, сгенерированные для манипулятора камеры. Расположение локальной сферической системы координат с началом в «нулевой точке» показано на фигуре 5. На фигуре 5 изображен узел манипулятора, к которому крепится камера с помощью средств крепления с возможностью изменения ее ориентации и положения.
Кроме сферической системы координат движения манипулятора можно описать в декартовой ортогональной системе координат с началом в «нулевой точке» (фигура 6). Плоскость XY в данном случае будет параллельна плоскости нижней платформы манипулятора (не показана на чертеже), а ось OZ перпендикулярна данной плоскости и положительно направлена от «нулевой точки» в сторону конца стереоскопической камеры.
На фигурах 7-9 продемонстрированы изменения положения конца камеры при изменении каждой координаты в отдельности. Фигура 7 отображает изменение длины камеры относительно «нулевой точки». Данная координата в локальной системе координат отвечает за приближение либо отдаление от оперируемой рабочей области. Важно отметить, что в рамках моделирования изменения положения механические особенности манипулятора не рассматриваются, а уделяется внимание тому, как изменяется положение камеры при изменении определенной координаты. Фигура 8 отражает изменение наклона камеры относительно продольной оси, что позволяет хирургу изменять положение в операционном поле вдоль продольной оси в поле обзора. Изменение наклона камеры относительно поперечной оси показано на фигуре 9. Такое изменение позволяет хирургу изменять положение в операционном поле вдоль поперечной оси в поле обзора. Таким образом, любое положение камеры в операционном поле возможно однозначно определить при помощи данных трех локальных координат для механического манипулятора, на который крепится камера.
На фигуре 10 в качестве примера показана траектория движения камерного манипулятора (траектория конца камеры) только при изменении угла наклона вдоль продольной оси  при постоянных значениях угла наклона вдоль поперечной оси и координаты длины камеры . В этом случае камера будет двигаться по внутренней поверхности сферы с радиусом, равным R.
при постоянных значениях угла наклона вдоль поперечной оси и координаты длины камеры . В этом случае камера будет двигаться по внутренней поверхности сферы с радиусом, равным R.
Но при этом контроллер управления перемещается в своей собственной ортогональной декартовой системе координат. Различие в локальных системах координат между контроллером и манипулятором приводит к тому, что хирургу приходится производить дополнительные движения контроллером, что при длительной операции может приводить к преждевременной усталости и ошибкам при удержании заданного операционного поля. Уменьшение количества совершаемых хирургом движений является одним из критериев повышения качества операции.
Рассмотрим случай, при котором необходимо переместить поле зрения камеры относительно исследуемого объекта на заданной высоте (фигура 11). На фигуре 11А схематически приведены перемещения руки хирурга в декартовой системе координат контроллера управления, которые обеспечивают необходимое движение камерным манипулятором. Для перемещения поля зрения камеры относительно исследуемого объекта хирургу необходимо первоначально переместить контроллер в том же направлении. Стоит учитывать, что камерный манипулятор осуществляет движение по внутренней поверхности сферы радиусом, равным длине стереоскопической камеры от «нулевой точки». Перемещение камеры в декартовой системе координат манипулятора камеры отображено на фигуре 11Б.
Условные обозначения, приведенные на фигуре 11: 10 - начальное и промежуточное положение руки оператора; 20 - итоговое положение руки оператора; 30 - начальное и промежуточное положение камеры, 40 - итоговое положение камеры, 50 - направление перемещения, 60 - исследуемый объект, 70 – «нулевая точка» камеры.
Далее хирургу необходимо вручную компенсировать то расстояние, на которое изменилось положение камеры относительно первоначального расстояния от исследуемого объекта. Таким образом, как следует из фигуры 11, хирург за два блока движений приводит камеру в нужную ему позицию. Например, для осуществления движения камерного манипулятора вдоль одной оси ОХ по радиусу, хирургу пришлось выполнять два движения – вдоль оси ОХ в том же направлении, что и манипулятор, и вдоль оси ОZ, в сторону исследуемого объекта, чтобы компенсировать отклонение, вызванное движением по радиусу, и тем самым обеспечить линейное перемещение.
Помимо погрешностей при совершении дополнительных движений хирургом, для того, чтобы переместить камеру из одной координаты в другую, восприятие хирургом изображений также может вносить искажения, которые возникают из-за разности системы координат контроллера управления и камеры. При таком управлении отсутствует интуитивность управления камерой, так как на прямолинейное движение контроллера управления вынужденно осуществляется наклонное движение исполнительного устройства (манипулятора с камерой), что приводит к расхождениям в восприятии хирургом. В связи с этим для управления камерой хирургу необходимо дополнительно обучаться и привыкать.
Способ компенсации движения камеры позволит менять положение конца камеры в одной плоскости, равноудаленной от оперируемой области и зависящей лишь от глубины погружения камеры относительно «нулевой точки». Данное скомпенсированное движение облегчит управление камерой в операционном поле за счет управления и воспроизведения движения камеры в аналогичных декартовых системах координат.
В конечном счете, это приводит к нивелированию различий в локальных системах координат задающего и исполнительного устройств, что повышает интуитивность управления камерой для хирурга, исключает лишние действия со стороны оператора и уменьшает число движений контроллера управления хирургом, что приводит к повышению качества и эффективности проводимых операций.
На фигурах 12А, 12Б и 12В показаны траектории движения кончика камеры в декартовой системе координат (движение по внутренней поверхности сферы с радиусом равным R) и скомпенсированный вид данный траектории (движение по прямой) после применения предлагаемого способа компенсации движения камеры при изменении угла наклона вдоль продольной оси при зафиксированных координатах длины камеры и угла наклона вдоль поперечной оси на контроллере управления, при изменении угла наклона вдоль поперечной оси при зафиксированных координатах длины камеры и угла наклона вдоль продольной оси на контроллере управления и при изменении углов наклона камеры вдоль продольной и поперечной оси при зафиксированной координате длины камеры.
Кроме того, при наклонах камерного манипулятора относительно «нулевой точки» (фигура 8, фигура 9) возникает отклонение средней линии кадра от линии горизонта. Данное искажение возникает из-за описанного выше движения в сферической системе координат.
Более подробно совершаемое контроллером движение и отклонение средней линии кадра от линии горизонта продемонстрировано на фигуре 13. Фигура 13А показывает изображение в кадре при нулевом угле наклона α манипулятора камеры. Фигура 13Б показывает изображение в кадре при положительном угле наклона α манипулятора камеры. α - угол между средней линией кадра и линией горизонта. Фигура 13В отражает необходимое движение рук оператора для восстановления линии горизонта в декартовой системе координат контроллера.
Условные обозначения, приведенные на фигуре 13: 11- линия горизонта,12 - средняя линия кадра, 13 – изображение исследуемого объекта, 10 - начальное положение руки оператора, 20 - итоговое положение руки оператора, 50 - направление движения.
Расхождение между средней линией кадра и линией горизонта устраняется поворотом эндоскопа вокруг собственной продольной оси в сторону, противоположную наклону (фигура 13В). Обычно оператор совершает данную процедуру вручную, при наличии такой технической возможности, заложенной в конструкцию манипулятора.
Для перехода в режим вращения эндоскопом, оператор нажимает педаль, которая передает сигнал в систему автоматического управления и контроллеры управления. Вращение осуществляется одновременным перемещением обоих контроллеров вдоль окружности по или против часовой стрелки в заданной плоскости. Диаметр окружности является расстоянием между контроллерами.
Таким образом, процесс выравнивания линии горизонта в кадре является периодической процедурой для хирурга, что приводит к совершению дополнительных движений рукой.
Автоматизация процессов выравнивания линии горизонта и перемещения поля зрения камеры относительно исследуемого объекта исключит лишние действия со стороны оператора и уменьшит число движений контроллером.
Дополнительным функционалом, который требует реализации при создании системы управления камерным манипулятором, является необходимость масштабирования движений манипулятора с камерой в плоскости XY в зависимости от координаты z. Данная необходимость вызвана тем, что чем выше находится стереокамера над исследуемым объектом или пространством, тем меньшие перемещения необходимо осуществлять манипулятором для обзора рабочей области. Схематично алгоритм изменения масштаба камерного манипулятора приведен на фигуре 14. На фигуре 14А показано приращение координаты по оси Х для контроллера управления хирурга в декартовой системе координат контролера управления. На фигуре 14Б показано изменение положения камеры при совершении перемещения контроллером управления в декартовой системе координат манипулятора камеры.
Условные обозначения, приведенные на фигуре 14: 10 - начальное и промежуточное положение руки оператора, 20 - итоговое положение руки оператора, 30 - начальное и промежуточное положение камеры, 40 - итоговое положение камеры, 50 - направление перемещения, 70 - нулевая точка камеры.
Рассмотрим перемещение камерного манипулятора с применением масштабирования движения в плоскости XZ (фигура 14). Задающее движение контроллера ∆X для обоих случаев одинаково, отличается координата z в локальной декартовой системе координат – проекция длины эндоскопической камеры от «нулевой точки» до конца на локальную ось OZ - ∆Z1> ∆Z2. В первом случае камера отдалена от «нулевой точки» на большее расстояние, чем во втором. При этом, для задающего одинакового движения ∆X перемещение ∆X1> ∆X2 не одинаковы, что и обеспечивает корректный масштаб движений.
В настоящее время существующие подходы к управлению камеры не используют какие-либо программные либо аппаратные способы компенсации движения камеры в плоскости, а воспроизводят его прямолинейно, реагируя на управляющую команду перемещения контроллера вдоль одной оси как изменение наклона относительно той же оси манипулятора.
Такой подход на практике легко реализуем и гарантирует достаточный набор данных для управления камерой, но не обеспечивает высокое качество управления, так как различия в задающей и исполняющей системах координат не позволяют хирургу интуитивно взаимодействовать с комплексом, что приводит к дополнительным движениям контроллером хирургом, увеличивает время операционного вмешательства, может приводить к преждевременной усталости и ошибкам.
В связи с тем, что в ответ на прямолинейное движение контроллера управления осуществляется наклонное перемещение исполнительного устройства, хирургу приходится постоянно учитывать этот факт при управлении камерой. Таким образом, для существующих способов управления камерой хирургу необходимо дополнительно обучаться и привыкать, так как данные движения не интуитивны, требуют определенных навыков в осознании и оценке увиденного для последующего управления.
Предлагаемый способ компенсации плоскости движения камеры подразумевает внедрение дополнительных алгоритмов в систему автоматического управления. Автоматизация процессов выравнивания линии горизонта и масштабирования движений камеры позволит увеличить интуитивность управления и снизить утомляемость хирурга.
Описываемый способ для управления перемещением камерного манипулятора, входящего в состав роботизированной хирургической системы согласно настоящему изобретению, выполнен с возможностью уменьшения количества перемещений стереокамеры, визуализирующей хирургическую область, в операционном поле.
Подробная функциональная схема управления камерой приведена на фигуре 15.
На схеме приведены основные этапы выполнения заявленного способа, а именно, передача данных с контроллеров управления, анализ и обработка полученных данных путем применения последовательных алгоритмов преобразования координат камерного манипулятора с момента получения системой автоматического управления от контроллеров абсолютных координат положения руки хирурга и состояния педали.
Система автоматического управления выполняет четыре последовательных алгоритма, первые два из которых предназначены для выполнения основной функции – управления манипулятором, а два дополнительных позволяют компенсировать указанные выше недостатки.
Детальные шаги предлагаемого способа представлены ниже.
Локальная система координат, связанная с контроллером управления, содержит информацию о положении контроллера в виде трех поступательных декартовых координат  и трех вращательных координат
и трех вращательных координат  .
.
От правого контроллера хирурга в систему автоматического управления передаются вектора  От левого контроллера хирурга в систему автоматического управления передаются вектора
От левого контроллера хирурга в систему автоматического управления передаются вектора 
При нажатии педали управления камерным манипулятором включается режим управления камерой, сигнал с педали передается не только в систему автоматического управления, но и в контроллеры, которые блокируют вращательные степени свободы, а вектора  обнуляются:
обнуляются:

Для управления камерным манипулятором достаточно трех поступательных степеней свободы, описываемых вектором  .
.
Полученные системой автоматического управления вектора обрабатываются с использованием алгоритма дифференцирования и объединения движения. Управление осуществляется при помощи относительного перемещения контроллера с момента начала управления камерой, инициализированного нажатием на педаль. Таким образом, увеличивается гибкость системы управления.

Управление камерой осуществляется обоими контроллерами одновременно. Таким образом, далее суммируется относительное перемещение каждого из контроллеров:

Полученный вектор  можно масштабировать, инвертировать, вращать вокруг ортогональных осей, составлять композиции поворотов. Любую из перечисленных математических операций можно осуществить при помощи векторного произведения.
можно масштабировать, инвертировать, вращать вокруг ортогональных осей, составлять композиции поворотов. Любую из перечисленных математических операций можно осуществить при помощи векторного произведения.
Далее осуществляют масштабирование. Масштабирование представляет собой векторное произведение  и строки
и строки  , содержащей коэффициенты масштабирования для каждой координаты.
, содержащей коэффициенты масштабирования для каждой координаты.

Операция масштабирования происходит в блоке масштабирования и интегрирования. Полученное на предыдущем этапе отмасштабированное приращение контроллеров хирурга прибавляется к текущему положению камерного манипулятора в его локальной декартовой системе координат.
Таким образом, в блок компенсации движения в плоскости поступает расчетное положение камерного манипулятора в локальной декартовой системе координат.
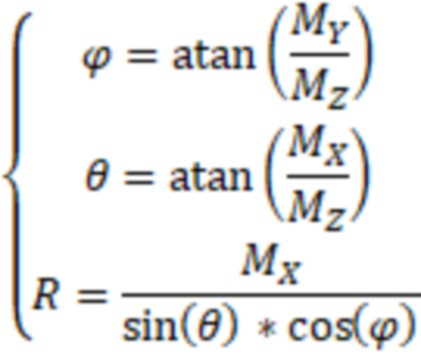
Для управления манипулятором необходимо перевести рассчитанные декартовы координаты в сферические. В связи с этим важны операции перевода векторов из одной системы координат в другую. Перевод из декартовой в сферическую систему координат осуществляется следующими алгебраическими преобразованиями:
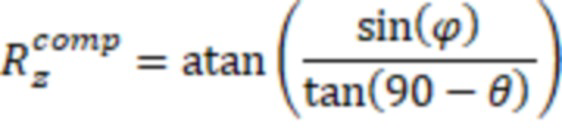
Помимо алгоритма компенсации движения манипулятора в плоскости, необходимо также реализовать алгоритм сопоставления линии горизонта со средней линией кадра, заключающийся в вычислении величины угла расхождения между линией горизонта и средней линией кадра, зависящей от углов наклона  и . Расхождение средней линии кадра с линией горизонта вычисляется в блоке компенсации горизонта согласно формуле:
и . Расхождение средней линии кадра с линией горизонта вычисляется в блоке компенсации горизонта согласно формуле:
На заключительном этапе способа согласно настоящему изобретению полученные данные одновременно передают на блок управления движениями манипулятора с закрепленной на нем камерой для ее перемещения внутри пациента с целью отображения операционного поля. При этом манипулятор с камерой осуществляет как поступательные движения для компенсации движения камеры и контроллеров управления, так и поворот вокруг своей продольной оси для нивелирования линии горизонта и средней линии кадра получаемого с камеры изображения. Перечисленные выше этапы предлагаемого способа, осуществляемые с помощью автоматической системы управления камерным манипулятором, описаны согласно блок-схеме 800, представленной на фигуре 16.
На этапе (810) получают данные о перемещении правого и левого контроллеров управления хирурга. На следующем этапе (820) определяют, поступал ли сигнал с педали. В том случае, если на систему автоматического управления поступает сигнал с педали, переключающей контроллеры в режим управления камерой, инициируется сигнал о начале работы системы автоматического управления камерным манипулятором.
На этапе (830) актуальные данные, поступившие с контроллера, поступают последовательно в вычислительный блок производных для правого и левого контроллеров, по приращению которых находится суммарное перемещение.
На следующем этапе (840) данное перемещение обязательно масштабируют с учетом отдаления эндоскопа от нулевой точки.
На этапе (850) происходит интегрирование полученного приращения с позицией манипулятора в его декартовой системе координат. Данная скомпенсированная плоскость движения переводится в сферические координаты манипулятора , , на основе которых на этапе (860) вычисляют величину компенсации линии горизонта
, на основе которых на этапе (860) вычисляют величину компенсации линии горизонта  . Полученный набор данных
. Полученный набор данных  ,
, передают на камерный манипулятор (этап 870). После чего этапы повторяют.
передают на камерный манипулятор (этап 870). После чего этапы повторяют.
Предложенный способ управления движением камеры добавляет интуитивно понятное взаимодействие с роботохирургическим комплексом и повышает эффективность проведения роботохирургической операции.
Принцип работы компенсации перемещений камеры основывается на переходе от одной системы координат в другую, что позволит хирургу работать в аналогичных системах координат как для задающего устройства, так и для исполнительного. В свою очередь, такая работа позволит хирургу практически сразу управлять камерой, так как управление становится интуитивно понятным. Для хирурга отпадет необходимость в приобретении дополнительных навыков управления камерой, так как скомпенсированное движение камеры точным образом воспроизводит положение камеры в соответствии с управляющими командами оператора. Применяемые алгоритмы компенсации линии горизонта и алгоритмы масштабирования позволяют уменьшить среднее время позиционирования манипулятора с камерой в теле пациента для наблюдения за операционным полем и уменьшить количество движений рук хирурга.
Сведения, полученные в результате экспериментов и подтверждающие снижение времени позиционирования манипулятора с камерой в теле пациента, что приводит к снижению времени операционного вмешательства и снижению количества движений рук хирурга, что повышает интуитивность и эффективность управления манипулятором камеры
Лабораторные испытания проводились с использованием манипулятора камеры, показанного на фигуре 17. Применение способа управления движением камеры во время проведения хирургической операции согласно настоящему изобретению позволяет уменьшить количество движений для позиционирования манипулятора камеры с целью отображения операционной зоны и снизить время операционного вмешательства.
Такой результат достигается за счет комплексного применения алгоритма компенсации плоскости при линейных движениях манипулятора камеры и алгоритма компенсации горизонта.
Проверка работоспособности алгоритма компенсации плоскости производилась за счет выполнения линейных перемещений манипулятором камеры вдоль декартовых осей X и Y в системе координат манипулятора камеры с использованием контроллера хирурга. При этом производилось наблюдение за проекцией на ось Z расстояния от произвольной точки исследуемого объекта до нулевой точки манипулятора.
На фигуре 17 представлено начальное положение манипулятора камеры в сферических координатах  , что соответствует координатам в декартовой системе координат манипулятора
, что соответствует координатам в декартовой системе координат манипулятора 
На фигуре 18 представлена позиция манипулятора камеры в положении, достигаемом при перемещении контроллера хирурга в декартовой системе координат из точки  в точку
в точку  . Алгоритм компенсации плоскости принудительно отключен, что приводит к следующим координатам в сферической системе координат манипулятора камеры
. Алгоритм компенсации плоскости принудительно отключен, что приводит к следующим координатам в сферической системе координат манипулятора камеры  , в декартовой системе координат манипулятора
, в декартовой системе координат манипулятора 
Можно видеть, что при описываемом перемещении происходит изменение координаты z манипулятора камеры в его декартовой системе координат, что соответствует изменению проекции расстояния на ось Z от нулевой точки манипулятора до исследуемого объекта. На фигуре 19 представлены кадры последовательного движения манипулятора камеры при принудительно отключенном алгоритме компенсации плоскости. На всех кадрах обозначена нулевая точка и траектория движения конца камеры.
На фигуре 20 представлена позиция манипулятора камеры в положении, достигаемом при перемещении контроллера хирурга в декартовой системе координат из точки в точку . При этом алгоритм компенсации плоскости включен, что приводит к следующим координатам в сферической системе координат манипулятора камеры
в точку . При этом алгоритм компенсации плоскости включен, что приводит к следующим координатам в сферической системе координат манипулятора камеры , в декартовой системе координат манипулятора
, в декартовой системе координат манипулятора 
Можно видеть, что при описываемом перемещении не происходит изменения координаты z манипулятора камеры в его декартовой системе координат, что соответствует сохранению длины проекции расстояния на ось Z от нулевой точки манипулятора до исследуемого объекта. На фигуре 21 представлены кадры последовательного движения манипулятора камеры при включенном алгоритме компенсации плоскости. На всех кадрах обозначена нулевая точка и траектория движения конца камеры.
Проверка работы алгоритма компенсации горизонта производилась за счет передачи управляющего воздействия вдоль декартовой оси X в системе координат контроллера, при этом начальное положение манипулятора камеры в его сферической системе координат было ненулевым и равнялось  . На фигуре 22 представлена последовательность изображений исследуемого объекта, нанесенная на проекцию траектории движения манипулятора камеры. Можно видеть, что нанесенная на исследуемый объект линия, параллельная линии горизонта, в исходном положении параллельна средней линии кадра. При осуществлении движения без использования алгоритма компенсации горизонта происходит поворот линии вокруг оси R манипулятора камеры в его сферической системе координат, зависящий от угла .
. На фигуре 22 представлена последовательность изображений исследуемого объекта, нанесенная на проекцию траектории движения манипулятора камеры. Можно видеть, что нанесенная на исследуемый объект линия, параллельная линии горизонта, в исходном положении параллельна средней линии кадра. При осуществлении движения без использования алгоритма компенсации горизонта происходит поворот линии вокруг оси R манипулятора камеры в его сферической системе координат, зависящий от угла .
Применение алгоритма компенсации горизонта позволяет сохранить параллельность линии горизонта и средней линии кадра за счет автоматического поворота камеры вокруг оси R в сферической системе координат манипулятора камеры. На фигуре 23 представлена последовательность кадров, нанесенная на траекторию движения манипулятора камеры. Исходная позиция манипулятора камеры в сферической системе координат равнялась , управляющее воздействие осуществлялось вдоль декартовой оси X в системе координат контроллера. Показано, что нанесенная на исследуемый объект линия, параллельная линии горизонта, остается параллельной средней линии кадра на любом участке траектории, что достигается за счет вычисления необходимого угла поворота алгоритмом компенсации.
Исследование эффективности проводилось за счет измерения времени, количества движений при многократном изменении области обзора в режиме позиционирования камеры.
В исследовании принимали участие врачи-хирурги с опытом работы на робот-ассистированном комплексе.
На объекте операционного поля были нанесены несколько контрольных точек, перед хирургом-оператором была поставлена задача осуществления перемещения камеры между ними в заданной последовательности, что моделирует процесс перемещения камеры в процессе проведения робот-ассистированной операции. Изображение объекта операционного поля и изображение кадра первой контрольной точки представлены на фигуре 24.
Было проведено две серии измерений: без использования алгоритмов компенсации плоскости и горизонта и с их использованием. Результаты серий опытов после статистической обработки приведены на фигурах 25 и 26.
Показано, что использование разработанных методов и алгоритмов компенсации позволяет понизить среднее время позиционирования в 1.5 раза и уменьшает количество движений рук в 1.3 раза, подтверждая ранее приведенные тезисы о повышении интуитивности и эффективности управления манипулятором камеры.
Несмотря на то, что изобретение описано со ссылкой на раскрываемые варианты воплощения, для специалистов в данной области должно быть очевидно, что конкретные подробно описанные эксперименты приведены лишь в целях иллюстрирования настоящего изобретения, и их не следует рассматривать как каким-либо образом ограничивающие объем изобретения. Должно быть понятно, что возможно осуществление различных модификаций без отступления от сути настоящего изобретения.
Кроме того, хотя настоящая патентная заявка относится к объекту, определенному в прилагаемой ниже в формуле изобретения, важно отметить, что настоящая заявка на патент содержит основание для формулировки других изобретений, которые могут, например, быть заявлены как объект уточненной формулы изобретения настоящей заявки или как объект формулы изобретения в выделенной и/или продолжающей заявке. Такой объект может быть охарактеризован любым признаком или комбинацией признаков, описанных в настоящем документе.
| название | год | авторы | номер документа |
|---|---|---|---|
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ РОБОТОМ | 2021 |
|
RU2775876C1 |
| ОЦЕНКА УСИЛИЯ НА РОБОТОХИРУРГИЧЕСКОМ ИНСТРУМЕНТЕ | 2019 |
|
RU2721462C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МАНИПУЛЯТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2720841C1 |
Изобретение относится к медицине, а именно к способу управления движением камеры, закрепленной на манипуляторе роботохирургического комплекса. Роботохирургический комплекс включает два контроллера управления, манипулятор с закрепленной на нем камерой для обзора операционного поля и систему автоматического управления. Каждый из контроллеров управления выполнен с возможностью оцифровывания движений рук хирурга и обеспечивает передачу векторов движения по трем поступательным и трем вращательным степеням свободы, представляющих разность между координатами контроллера управления в начальном положении и координатами контроллера управления при изменении положения руки хирурга. Манипулятор обеспечивает перемещение камеры по трем поступательным степеням свободы. Система автоматического управления связана с обоими контроллерами управления и манипулятором. Способ характеризуется следующими шагами: передача данных векторов движения по трем поступательным и трем вращательным степеням свободы правого и левого контроллеров управления в систему автоматического управления с постоянной частотой; осуществление переключения контроллеров управления в режим управления камерой; осуществление управления движением манипулятора с закрепленной на нем камерой. Переключение контроллеров в режим управления камерой осуществляется путем нажатия на педаль управления. Сигнал с педали управления передают в систему автоматического управления и на контроллеры управления для блокировки у последних вектора движения вращательных степеней свободы. После блокировки вращательных степеней свободы контроллера управления вектор вращательных координат в системе автоматического управления обнуляется. Управление движением манипулятора осуществляется посредством одновременного перемещения контроллеров управления и последующего выполнения следующих этапов: этап сохранения полученных векторов движения контроллеров управления в системе автоматического управления; этап обработки и объединения векторов движения правого и левого контроллеров управления для нахождения суммарного перемещения; этап масштабирования полученного на предыдущем этапе вектора перемещения; этап компенсации движения; этап компенсации отклонения линии горизонта от средней линии кадра; этап одновременной передачи полученных на предыдущих шагах данных на исполнительные механизмы манипулятора для его поступательного перемещения и поворота вокруг продольной оси закрепленной на нем камеры. Этап компенсации движения содержит суммирование отмасштабированного вектора перемещения и вектора текущего положения указанного манипулятора в его локальной декартовой системе координат и перевод полученного вектора положения манипулятора из декартовой в сферическую систему координат. Этап компенсации отклонения линии горизонта от средней линии кадра осуществляется путем вычисления величины расхождения угла, зависящего от углов наклона камеры в сферической системе координат. Изобретение обеспечивает сокращение продолжительности операции, уменьшение рисков ошибок хирурга, а также сокращение утомляемости хирурга на основе максимально интуитивно понятного порядка управления камерой. 1 з.п. ф-лы, 26 ил.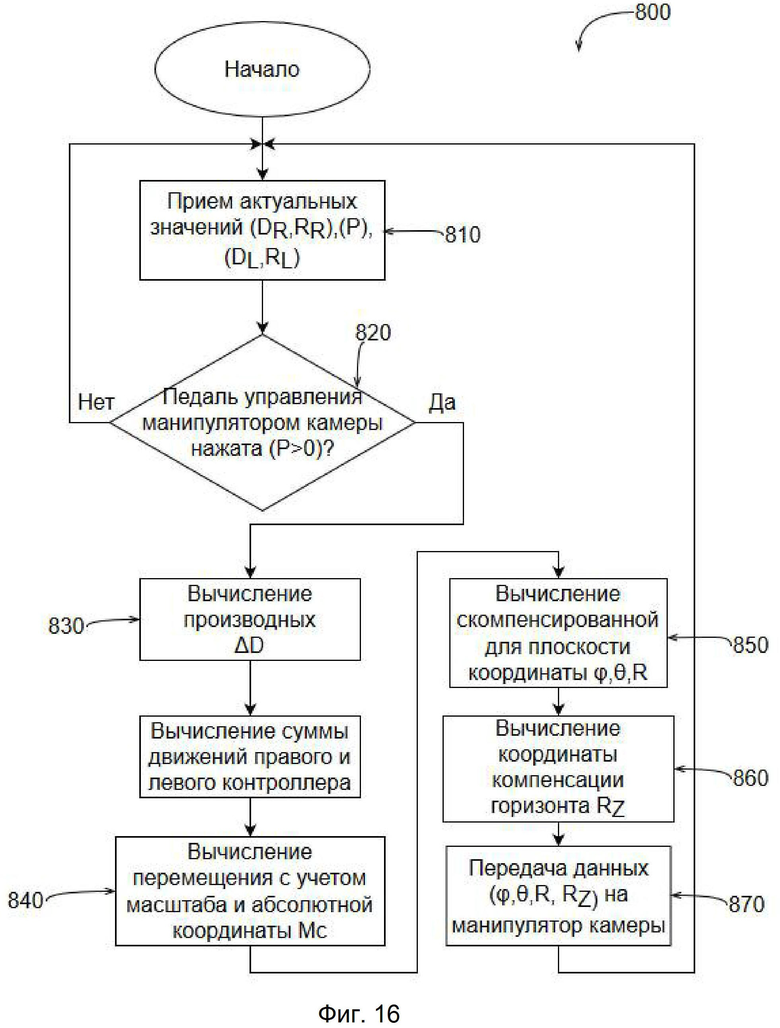
1. Способ управления движением камеры, закрепленной на манипуляторе роботохирургического комплекса, включающего
два контроллера управления роботохирургическим комплексом, каждый из которых выполнен с возможностью оцифровывания движений рук хирурга и обеспечивающий передачу векторов движения по трем поступательным и трем вращательным степеням свободы, представляющих разность между координатами контроллера управления в начальном положении и координатами контроллера управления при изменении положения руки хирурга, при этом каждый контроллер управления выполнен с возможностью переключения в режим управления камерой с помощью педали управления;
по меньшей мере один манипулятор с закрепленной на нем камерой для обзора операционного поля, обеспечивающий ее перемещение по трем поступательным степеням свободы;
систему автоматического управления, которая связана с обоими контроллерами управления и по меньшей мере одним манипулятором;
при этом способ характеризуется следующими шагами:
передача данных векторов движения по трем поступательным и трем вращательным степеням свободы правого и левого контроллеров управления в систему автоматического управления с постоянной частотой,
осуществление переключения контроллеров управления в режим управления камерой, закрепленной на манипуляторе, путем нажатия на педаль управления, при этом сигнал с педали управления передают в систему автоматического управления и на контроллеры управления для блокировки у последних вектора движения вращательных степеней свободы, причем после блокировки вращательных степеней свободы контроллера управления вектор вращательных координат в системе автоматического управления обнуляется;
осуществление управления движением манипулятора с закрепленной на нем камерой посредством одновременного перемещения контроллеров управления и последующего выполнения следующих этапов:
этап сохранения полученных векторов движения контроллеров управления в системе автоматического управления;
этап обработки и объединения векторов движения правого и левого контроллеров управления, характеризующих поступательные движения, для нахождения суммарного перемещения;
этап масштабирования полученного на предыдущем этапе вектора перемещения;
этап компенсации движения, содержащий суммирование отмасштабированного вектора перемещения и вектора текущего положения указанного манипулятора в его локальной декартовой системе координат и перевод полученного вектора положения манипулятора из декартовой в сферическую систему координат;
этап компенсации отклонения линии горизонта от средней линии кадра путем вычисления величины расхождения угла, зависящего от углов наклона камеры в сферической системе координат;
этап одновременной передачи полученных на предыдущих шагах данных на исполнительные механизмы манипулятора для его поступательного перемещения и поворота вокруг продольной оси закрепленной на нем камеры.
2. Способ по п. 1, характеризующийся тем, что масштабирование вектора перемещения осуществляют с учетом отдаления камеры от нулевой точки камеры в локальной системе координат камеры, относительно которой изменяет свое положение вектор положения камеры с началом в точке вхождения камеры в отверстие в теле пациента и с концом, совпадающим с фактическим положением конца камеры.
| US 9949798 B2, 24.04.2018 | |||
| ЭЛЕКТРОМАГНИТНОЕ РЕЛЕ | 0 |
|
SU185415A1 |
| US 20090326556 A1, 31.12.2009 | |||
| US 9188973 B2, 17.11.2015 | |||
| US 9907458 B2, 06.03.2018. | |||

