Область техники
Изобретение относится к измерительной технике, в частности к средствам исследования движения человека, оборудования или инструмента. Изобретение может быть использовано в биомеханике для изучения движений пациента, в строительства для управления направленным бурением, в системах виртуальной и дополненной реальности, компьютерных играх и в других областях науки и техники, связанных с измерениями движения.
Уровень техники
Известна технология магнитного позиционирования (МП) подвижных объектов, основанная на генерировании магнитного поля с известным пространственным распределением в зоне перемещения подвижного объекта, измерении ортогональных компонент данного поля подвижным приемником и вычислении координат подвижного приемника в реальном времени, чаще всего путем итерационного сравнения измеренных значений поля с вычисляемыми значениями для предполагаемых координат подвижного приемника [1-5].
В мировой практике применяются два способа магнитного позиционирования подвижных объектов, отличающихся характером генерируемого магнитного поля:
1. Способ, использующий непрерывные синусоидальные магнитные поля ортогональной ориентации, генерируемые на разных частотах - АС-способ [1] от английского выражения "Alternating current" - переменный ток.
2. Способ, использующий импульсные магнитные поля чередующейся ориентации - DC-способ [2, 3], от английского выражения "Direct current" -постоянный ток.
Использование синусоидального поля позволяет достичь большей частоты измерений за счет одновременности действия всех полей. Основным недостатком АС - способа является сильная зависимость точности позиционирования от наличия металла в окружающем интерьере. Синусоидальные магнитные поля наводят вихревые токи в металлических элементах, которые существенно влияют на измеряемые поля, и ограничивают применение метода в ряде областей, например в авиации, где в замкнутом объеме металлической кабины летательного аппарата невозможно получить требуемую точность позиционирования данным методом.
DC - способ чувствителен к магнитному полю Земли (МПЗ), которое векторно складывается на подвижном приемнике с каждым генерируемым импульсным полем. Поэтому для компенсации влияния МПЗ в последовательность генерируемых импульсов поля введена пауза, когда все источники выключены. Во время паузы подвижный приемник измеряет компоненты МПЗ в текущей ориентации, которые затем последовательно вычитаются из общих измеряемых сигналов с включенными источниками. Импульсное поле позволяет устранить влияние вихревых токов, наводимых в металлических элементах интерьера, на точность позиционирования.
Оба известных способа позволяют определять шесть координат подвижного объекта - три линейных координаты и три угла, определяющих ориентацию объекта - азимут, угол места и крен. Оба способа осуществляются при помощи одного или нескольких фиксированных в пространстве источников магнитного поля, а также подвижного приемника, подающего измеряемые сигналы в компьютер, где вычисляются текущие линейные и угловые координаты подвижного приемника относительно зафиксированных источников поля. Множество конфигураций систем МП, используемых в разных областях применения, отличается количеством источников и приемников магнитного поля и их конструктивным оформлением [4]. Наиболее распространенная конфигурация [3*3] включает три фиксированных в пространстве независимых источника магнитного поля и три ортогональных приемника на подвижном объекте. Совокупность источников составляет генератор магнитного поля, являющийся обязательной частью магнитной системы позиционирования, определяющей полный набор координат подвижного объекта - линейное положение и ориентацию. При этом однозначное позиционирование -вычисление координат подвижного объекта обеспечивается в любой точке вокруг генератора магнитного поля. При исключении одного источника у получившейся конфигурации [2*3] размер зоны однозначного позиционирования сокращается до одного квадранта, но устойчивая работа системы в этой зоне сохраняется.
Выбор прототипа
Наиболее близким по технической сущности и достигаемому результату к настоящему изобретению является DC-способ, составляющий суть импульсной системы позиционирования и заключающийся в генерировании последовательности импульсных магнитных полей различной ориентации, разделении последовательности паузой, когда все источники выключены, измерении компонент каждого магнитного поля в точке наблюдения, вычислении координат подвижного тела. По сравнению с АС-способом DC-способ свободен от влияния вихревых полей, имеющих возможность затухнуть каждый раз в течение импульса поля до начала измерений, длительность которого выбирают по возможности большей, чем время затухания вихревых токов в окружающем интерьере.
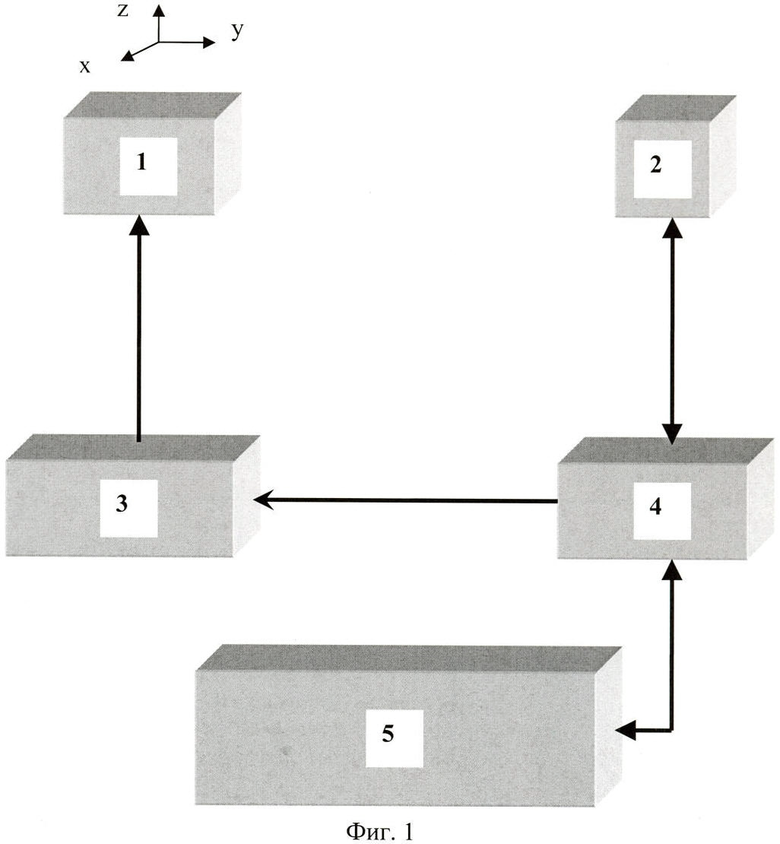
Для реализации известного способа-прототипа используется система магнитного позиционирования, структурная схема которой приведена на фиг.1, и включает в себя:
- неподвижный в заданной системе координат XYZ генератор магнитного поля 1, содержащий, как правило, два или три источника магнитного поля с разной ориентацией, разнесенных в пространстве или чаще всего объединенных в одном конструктивном элементе - генераторе магнитного поля. В качестве источников магнитного поля применяются обмотки с током, имеющие разную ориентацию, например - по ортогональным осям неподвижной прямоугольной системы координат;
- подвижный приемник 2 - измерительное устройство, содержащее, как правило, два или три ортогональных датчика магнитного поля и жестко связанное с подвижным объектом, позиционирование которого ведется магнитной системой (на чертеже не показано);
- контроллер 3, управляющий работой генератора магнитного поля;
- аналого-цифровой интерфейс 4, преобразующий аналоговые сигналы от подвижного приемника в коды и вырабатывающий цифровые управляющие сигналы, необходимые для работы контроллера;
- вычислитель 5, управляющий работой всей системы и решающий математическую задачу нахождения координат подвижного приемника.
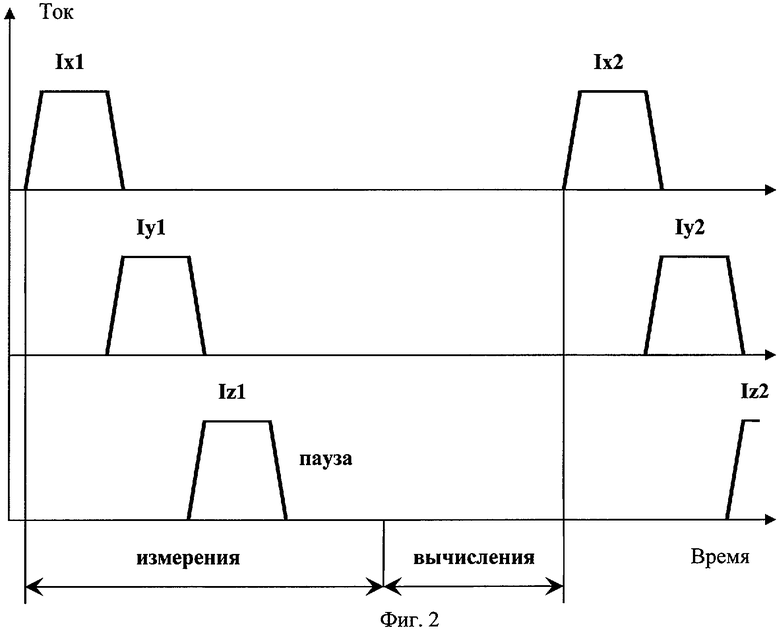
Работа импульсной системы магнитного позиционирования поясняется графиками, приведенными на фиг.2.
- По управляющим сигналам, получаемым от вычислителя через интерфейс, контроллер последовательно запитывает обмотки генератора магнитного поля импульсами тока с плоской вершиной Ix, Iy, Iz.
- Подвижный приемник, удаленный от генератора магнитного поля, каждый раз измеряет векторную сумму магнитного поля, генерируемого тем или иным источником и МПЗ в данной точке. В общем случае ориентация подвижного приемника на момент измерения неизвестна. Поэтому для выделения информационных полей, генерируемых источниками, необходимо компенсировать влияние МПЗ. Для измерения МПЗ, как видно из фиг.2, предназначена пауза после завершения последовательности работы источников поля. Во время паузы все источники выключены, токи по обмоткам не протекают. В этом случае подвижный приемник измеряет только компоненты МПЗ в текущей ориентации. Пауза токов, когда все источники выключены, является обязательным условием для правильного функционирования импульсной системы магнитного позиционирования. Таким образом, в системе магнитного позиционирования, содержащей 3 источника в генераторе магнитного поля и три датчика в приемнике, за полный цикл работы системы производится в общей сложности 12 измерений компонент магнитного поля в точке нахождения подвижного приемника - 3 раза по 3 измерения от каждого источника и еще три измерения во время паузы токов. Затем измеренные за время паузы токов компоненты МПЗ последовательно вычитаются из суммарных полей, полученных при включенных источниках магнитного поля. Полученные таким образом данные - 9 результатов вычитания свободны от влияния МПЗ и используются далее для вычисления координат подвижного приемника.
- После завершения полного периода работы источников поля и паузы предусматривается дополнительное время, необходимое для решения математической задачи вычисления координат подвижного приемника, как следует из фиг.2. Данная задача чаще всего сводится к решению системы нелинейных алгебраических уравнений, которое, как правило, производится итерационными численными методами сравнения измеряемых значений поля с величинами, получаемыми из математических моделей источников поля для предполагаемых координат приемника.
- Серия последовательных импульсов тока питания отдельных источников магнитного поля показана на фиг.2 для случая генератора магнитного поля, состоящего из трех источников. В этом случае девять независимых измерений обеспечивают единственное решение математической задачи позиционирования во всем объеме зоны перемещения. В некоторых случаях при ограничении объема перемещения подвижного приемника возможно использование двух источников поля вместо трех. Тогда, соответственно, будет и два импульса тока в последовательности вместо трех импульсов, как показано на фиг.2 для генератора с тремя источниками. Соответственно, и число независимых измерений в данном случае составит шесть, вместо девяти.
- После решения математической задачи последовательность работы источников тока генератора магнитного поля повторяется, обеспечивая тем самым непрерывно-дискретную работу импульсной магнитной системы позиционирования.
Недостатки известного способа магнитного позиционирования, выбранного в качестве прототипа, заключаются в следующем.
1. Понижение уровня измеряемых полей в DC-системе по сравнению с АС-системой в связи с переходом на однополярные импульсы тока. Использование однополярного тока возбуждения в DC-системе вдвое снижает размах принимаемого сигнала по сравнению с АС-методом, где генерируется двухполярное, знакопеременное поле синусоидальной формы. Снижение размаха поля ведет к уменьшению дальности действия системы позиционирования при заданной точности позиционирования и уровне шумов приемника.
2. Понижение стабильности работы системы. Пауза в последовательности токов нарушает регулярную работу устройства электропитания системы, которое вынуждено работать в прерывистом режиме. Данное обстоятельство ведет к появлению дополнительной нестабильности в работе системы магнитного позиционирования, т.к. первый импульс тока в последовательности каждый раз приходится на переходный процесс источника питания, что создает неравные условия для формирования плоской вершины разных импульсов тока. Необходимость решения данной задачи заставляет усложнять схему и алгоритм работы силовой части системы позиционирования.
3. Повышение динамической погрешности позиционирования. Информация, получаемая во время паузы токов, используется для обработки каждого импульса тока в последовательности для компенсации влияния МПЗ. Но за период между соседними паузами сигналы МПЗ не постоянны, т.к. подвижный приемник может менять свою ориентацию. Поэтому точность компенсации влияния МПЗ в прототипе не одинакова для разных импульсов из-за относительно большого времени между соседними паузами. Данное обстоятельство создает дополнительную динамическую погрешность позиционирования, особенно с учетом того, что МПЗ может быть много больше рабочего поля, создаваемого системой. В частности, при удалении подвижного приемника от генератора поля амплитуда рабочего поля становится много меньше величины МПЗ. В результате снижаются динамические свойства системы позиционирования, понижается точность позиционирования движущихся объектов. При этом точность компенсации МПЗ на больших расстояниях приобретает первостепенное значение даже для статических измерений.
4. Пониженная частота обновления выходных данных системы позиционирования. Вычисления координат подвижного объекта ведутся с частотой повторения паузы, что в 3-4 раза ниже частоты следования импульсов магнитного поля.
Сущность изобретения
Задачами, на решение которых направлено данное изобретение, являются:
- увеличение дальности действия системы позиционирования,
- повышение стабильности работы системы,
- снижение динамической погрешности позиционирования,
- повышение частоты обновления координат подвижного объекта.
Технический результат, достигаемый при использовании настоящего изобретения, состоит в увеличении дальности, стабильности, снижении динамической погрешности и повышении частоты обновления выходных данных при магнитном позиционировании подвижных объектов.
Поставленная задача с достижением упомянутого выше результата решается тем, что предложен способ магнитного позиционирования подвижных объектов, описанный ниже.
Для повышения дальности действия системы согласно изобретению предлагается питать обмотки источников магнитного поля двухполярными импульсами тока с плоскими вершинами, что удвоит размах поля на подвижном приемнике и, соответственно, размах измеряемого сигнала, используемого в расчетах координат подвижного приемника. Влияние собственных шумов подвижного приемника уменьшается при этом не менее чем в 1.41 раза, т.к. шумы складываются квадратично, а информационные сигналы - линейно. Соответственно растет дальность действия системы.
Кроме того, в данном случае исчезает необходимость специально компенсировать влияние МПЗ, т.к. компенсация происходит автоматически за счет того, что величина поля, генерируемого конкретным источником в точку нахождения приемника, получается как разность величин, измеренных для каждой полярности тока возбуждения данного источника. При этом дополнительно увеличивается точность компенсации влияния МПЗ, т.к. составляющая измеряемых сигналов, вызванных МПЗ, более одинакова для обеих полярностей и лучше компенсируется при вычитании.
Количество измерений при этом сокращается с 12-ти до 9-ти для системы с тремя источниками и тремя приемниками.
Разнополярные импульсы тока можно генерировать непосредственно друг за другом, что является основным режимом работы системы позиционирования согласно изобретению. При этом интервал времени между ними может быть сокращен до величины гораздо меньшей, чем интервал между паузами в прототипе, что согласно изобретению позволяет уменьшить динамическую погрешность позиционирования за счет увеличения точности компенсации МПЗ.
Для повышения стабильности и точности работы системы согласно изобретению предлагается исключить паузу токов. В прототипе для завершения цикла измерений нужна пауза токов, без которой невозможно вычислить амплитуды рабочих полей и координат подвижного приемника. При переходе на двухполярные импульсы тока необходимость в паузе отпадает, что создает практически непрерывный режим работы устройства электропитания системы, повышает надежность и стабильность работы системы позиционирования, упрощает схему.
Для увеличения частоты обновления выходных данных и снижения динамической погрешности позиционирования согласно изобретению предлагается производить вычисление координат после каждого частного цикла переключения источника магнитного поля, не дожидаясь завершения всей последовательности, составляющей период работы системы позиционирования. При этом для вычислений каждый раз будет использоваться текущая серия из предшествующих импульсов тока, которых может быть шесть или четыре в зависимости от конфигурации зоны перемещения подвижного объекта. Величина МПЗ в данном случае компенсируется наилучшим образом каждый раз для пары разнополярных импульсов, следующих друг за другом. Т.к. величина МПЗ чаще всего намного превышает рабочее поле, то точность его компенсации сильнее влияет на результирующую точность позиционирования, чем динамические изменения рабочего поля.
Перечень чертежей
Далее изобретение будет подробно пояснено со ссылками на прилагаемые чертежи, на которых изображены:
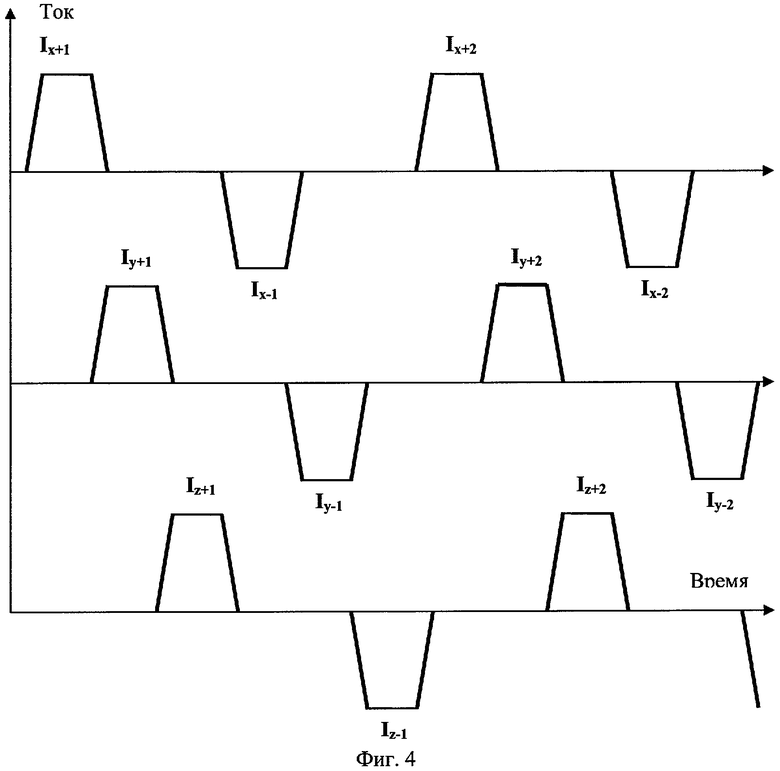
На фиг.3 - график следования двухполярных импульсов тока для варианта, когда периодически меняется полярность каждого импульса тока через соответствующую обмотку источника (пример реализации способа 1).
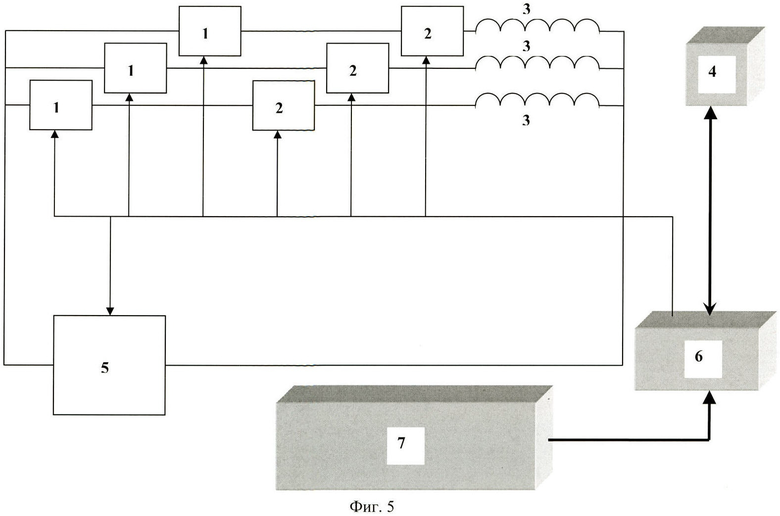
На фиг.4 - график следования двухполярных импульсов тока для варианта, когда переключается полярность всей серии импульсов тока через три обмотки источников магнитного поля (пример реализации способа 2).
На фиг.5 - пример структурной схемы устройства, предназначенного для реализации предлагаемого способа магнитного позиционирования.
Как следует из фиг.3 и 4, каждая обмотка генератора магнитного поля возбуждается последовательно двумя импульсами одинаковой амплитуды, но разных полярностей. Причем группировать импульсы можно двумя путями:
- переключать полярность импульсов тока для каждого источника поля последовательно и сразу друг за другом, запитывая каждый источник двумя импульсами тока разной полярности;
- импульсы одной полярности объединить в общую группу, сначала пропустить через обмотки источников все импульсы одной полярности, затем переключить полярность импульсов тока и пропустить через обмотки серию импульсов тока обратной полярности.
Именно два таких разных способа группировки импульсов тока приведены на фиг.3 и 4 соответственно.
Можно видеть, что в обоих вариантах два сигнала на подвижном приемнике, созданные следующими друг за другом разнополярными импульсами тока через единичный источник поля, содержат вклад МПЗ. Например, на фиг.3:
В1+=K*1x+1+ВМПЗ,
B1-=K*1x-1+ВМПЗ,
Bs=В1+-В1-=K*(Ix+1+Ix-1),
где Ix+1 - величина положительного импульса тока через обмотку источника поля "X",
Ix-1 - величина отрицательного импульса тока через обмотку источника поля "X",
В1+ - суммарное магнитное поле, измеряемое одним из датчиков подвижного приемника за время действия положительного импульса тока в обмотке источника поля "X",
В1- - суммарное магнитное поле, измеряемое тем же датчиком подвижного приемника за время действия отрицательного импульса тока в обмотке того же источника поля "X",
K - коэффициент пропорциональности, определяемый координатами подвижного приемника и его магнитной чувствительностью,
ВМПЗ - проекция магнитного поля Земли на текущее положение подвижного приемника,
Bs - сигнальное поле, поступающее в вычислительный код.
Таким образом, попарное вычитание сигналов с каждого датчика подвижного приемника для разных направлений токов в обмотках источников поля приводит к компенсации влияния магнитного поля Земли и удваивает измеряемое информационное магнитное поле. В результате возрастает дальность работы системы позиционирования.
Для нахождения всех координат подвижного приемника в конфигурации [3*3] необходимо использовать данные, полученные за шесть предыдущих импульсов тока, что дает девять независимых измерений магнитных полей. В конфигурации [2*3] таких измерений будет шесть, а число импульсов тока в полном цикле измерений равно четырем.
Как можно видеть из сравнения графиков, приведенных на фиг.2 и 3, при той же длительности импульса тока частота смены выходной информации возрастает в 3 раза для конфигурации [3*3] по сравнению с прототипом. В конфигурации [2*3] частота смены выходной информации, частота обновления координат подвижного объекта возрастает не менее, чем в два раза. С ростом частоты смены выходных данных уменьшается перемещение подвижного объекта между соседними вычислениями координат при заданной скорости линейных или угловых перемещений. Сближение координат подвижного объекта в соседних точках траектории ведет, соответственно, к снижению числа итераций численных вычислений, необходимых для обеспечения заданной точности позиционирования. Данное обстоятельство, в свою очередь, ведет к уменьшению времени единичных вычислений, что способствует дальнейшему повышению частоты смены выходной информации или частоты дискретизации траектории подвижного объекта.
Процесс переключения тока завершается выходом на плоскую вершину импульса, после чего производится измерение текущих сигналов с датчиков подвижного приемника. Одновременно с измерением производится вычисление координат приемника, используя серию предшествующих сигналов.
Например, на плоской части импульса Iy+2 (фиг.3) проводится измерение сигналов с датчиков подвижного приемника, и одновременно решается математическая задача определения координат с использованием сигналов, полученных ранее во время импульсов тока Ix-2, Ix+2, Iz-1, Iz+1, Iy+1, Iy-1. Аналогично для другого способа группировки импульсов тока (фиг.4) на плоской части, например, импульса Iz+2 измеряются текущие сигналы с датчиков, и решается математическая задача по предыдущим значениям, полученным во время импульсов. Iy+2, Ix+2, Iz-1, Iy-1, Ix-1, Iz+1.
Современные вычислительные средства позволяют проводить измерения, не используя ресурсы основного процессора, который может использоваться в это же время для решения математической задачи (режим DMA - Direct Memory Access). Измеряемая информация в этом случае записывается в оперативную память вычислителя, минуя основной процессор.
Снижение динамической погрешности позиционирования происходит за счет более точной компенсации влияния МПЗ, получаемой в результате сокращения интервала времени между соседними измерениями. Действительно, интервал между импульсами Ix-2, Ix+2 на фиг.3 гораздо меньше, чем между паузой и импульсом Ix на фиг.2. Таким образом, значение МПЗ за указанный интервал времени меняется на меньшую величину, что и обеспечивает большую точность компенсации МПЗ.
Исключение паузы между сериями импульсов тока ведет к повышению стабильности работы системы.
На фиг.4 показана последовательность двухполярных импульсов тока для второго варианта реализации заявляемого способа, когда переключается полярность всей серии импульсов тока через три обмотки источников магнитного поля.
Таким образом, последовательность, показанная на фиг.3, наиболее эффективна для позиционирования быстрых движений, например для измерений движений человека. Фиг.4, соответственно, показывает последовательность с более простой реализацией, которая может быть применена для квазистатического позиционирования, например в подземной навигации и других областях науки и техники.
Осуществление изобретения
Заявленный способ может быть осуществлен, например, при помощи устройства, структурная схема которого приведена на фиг.5.
Устройство включает три идентичных цепи, каждая из которых содержит коммутатор тока 1, инвертор направления тока 2 и обмотку источника магнитного поля 3, включенные последовательно. Три указанных цепи, собранные параллельно друг другу, подключены к источнику импульсного тока 5. Обмотки имеют разную ориентацию в генераторе поля, благодаря чему обеспечивается генерирование последовательности импульсных магнитных полей различной ориентации в окружающем пространстве.
Каждый коммутатор тока и инвертор направления тока имеют управляющие входы, воздействие на которые меняет их состояние - включено/выключено для коммутатора и прямое/обратное направление для инвертора. Таким образом, меняя уровни сигналов на управляющих входах, появляется возможность подключать к источнику тока ту или иную обмотку генератора магнитного поля из трех предусмотренных, с прямым или обратным направлением импульсного тока. Управляющий вход имеется и у источника тока, по сигналу на который формируется импульс тока требуемой длительности и величины. Управляющие сигналы формируются на программном уровне в вычислителе 7 и через аналого-цифровой преобразователь 6 подаются на коммутаторы, инверторы и источник тока. Сигналы от подвижного приемника 4 вводятся в вычислитель также через аналого-цифровой преобразователь.
Работает устройство следующим образом. Программно-математическое обеспечение, записанное в память вычислителя, определяет последовательность и длительность подключения каждой обмотки генератора магнитного поля к источнику импульсного тока. При поступлении сигнала на управляющий вход выбранного коммутатора тока устанавливается его проводящее состояние. Одновременно другим сигналом устанавливается требуемое направление тока соответствующего инвертора тока. После проведенных подготовительных операций следующий управляющий сигнал запускает генератор тока, который возбуждает подготовленную обмотку источника поля импульсом тока, требуемой полярности и длительности. После завершения первого импульса происходит снятие управляющего сигнала с входа используемого инвертора тока, в результате чего он меняет направление тока в своей обмотке на обратное. Повторный управляющий сигнал на источник импульсного тока запускает второй импульс тока в подключенную обмотку генератора поля, но уже обратной полярности. После завершения второго импульса тока снимается управляющий сигнал с использованного коммутатора тока, и цикл повторяется для второй и третьей обмоток генератора поля. Таким образом, каждый источник магнитного поля работает дважды подряд с разными направлениями тока, что соответствует последовательности, изображенной на фиг.3. Описываемое устройство может реализовывать и другие последовательности, например, как изображено на фиг.4. Здесь сначала все обмотки возбуждаются импульсами одной полярности, а затем - все обмотки возбуждаются импульсами обратной полярности.
На площадке каждого импульса тока сигналы от подвижного приемника преобразуются в коды в аналого-цифровом интерфейсе и поступают в вычислитель для решения математической задачи нахождения текущих координат подвижного приемника. Измерения сигналов производятся одновременно с вычислениями, не затрагивая ресурса процессора вычислителя. Процессор в это время считает координаты по предварительным измерениям, а измеряемые данные в это же время поступают в память вычислителя, где накапливаются для последующих вычислений.
При ограничении зоны перемещения подвижного приемника используются только две обмотки генератора поля, при этом коммутаторов тока и инверторов также используется два, а не три, как в описанном выше случае неограниченного перемещения подвижного приемника.
Типичная длительность единичного импульса тока составляет единицы миллисекунд, что превышает время затухания вихревых токов, наводимых импульсной системой в электропроводящих элементах интерьера зоны перемещения. Для длительности импульса 2 мс полный цикл работы системы позиционирования для конфигурации [3*3] составляет 2*6=12 мс, что нетрудно видеть из фиг.4. Время решения математической задачи составит также 2 мс, а частота смены выходной информации в этом случае составит более 250 Гц, что превышает данную величину для известных мировых аналогов. За 2 мс вариации МПЗ имеют гораздо меньшую величину, чем за целый период работы системы прототипа.
Источники информации
1. Raab F.H. Remote object position locater. - Патент N 4054881, США, G01S 3/02, The Austin Company, 1977.
2. Blood E.B. Device for quantitatively measuring the relative position and orientation of two bodies in the presence of metals utilizing direct current magnetic fields. - Патент США 4849692, США, G01B 7/14, Ascension Technology Corporation, 1989.
3. М.В.Желамский Магнитное позиционирование в нашлемных системах. Электроника - НТВ №7 2006 г.
4. М.Желамский Электромагнитное позиционирование - преимущества и области применения. Электроника - НТВ. №3 2007 г.
5. М.Желамский Магнитное позиционирование в системах виртуальной и дополненной реальности Электроника - НТВ. №5 2007 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2690526C1 |
| СПОСОБ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2000 |
|
RU2197013C2 |
| Способ измерения магнитного курса подвижного объекта и устройство для его осуществления | 2017 |
|
RU2653599C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРАТЧАЙШЕГО РАССТОЯНИЯ И НАПРАВЛЕНИЯ НА ЛИНИЮ ЭЛЕКТРОПЕРЕДАЧИ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2316790C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| Феррозондовый магнитометр | 1980 |
|
SU930176A1 |
| СПОСОБ ЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2354999C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2574167C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2016 |
|
RU2626755C1 |
Изобретение относится к измерительной технике, в частности к средствам исследования движения, и может быть использовано в биомеханике для изучения движений пациента, в строительстве для управления подземным бурением, в компьютерных играх и в других областях науки и техники. Технический результат заключается в увеличении дальности, стабильности, снижении динамической погрешности и повышении частоты обновления выходных данных при магнитном позиционировании подвижных объектов. Способ заключается в генерации двухполярных импульсов магнитных полей разной пространственной ориентации, измерении ортогональных компонент магнитного поля на подвижном объекте, компенсации влияния магнитного поля Земли путем попарного вычитания компонент магнитных полей и вычислении текущих координат подвижного приемника. 5 ил.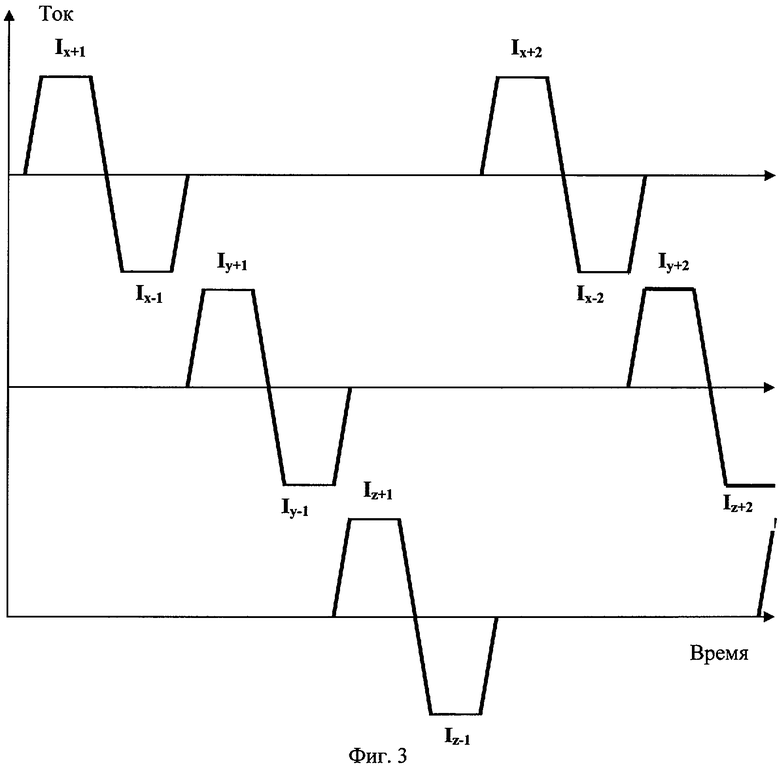
Способ позиционирования подвижного объекта в фиксированной системе координат, заключающийся в том, что
генерируют последовательно во времени двухполярные импульсы магнитных полей разной пространственной ориентации;
измеряют ортогональные компоненты магнитного поля на вершине импульса каждой полярности каждого двухполярного импульса магнитного поля каждой пространственной ориентации на подвижном объекте;
компенсируют влияние магнитного поля Земли путем попарного вычитания компонент магнитных полей, измеренных во время действия разных полярностей каждого двухполярного импульса магнитного поля;
сохраняют скомпенсированные измеренные компоненты магнитных полей;
вычисляют текущие координаты подвижного приемника после каждого переключения ориентации магнитного поля, используя текущие скомпенсированные компоненты магнитного поля, а также сохраненные скомпенсированные компоненты магнитного поля, полученные во время действия предыдущих двухполярных импульсов магнитного поля другой ориентации по отношению к текущему двухполярному импульсу, составляющих повторяющийся период генерирования импульсного магнитного поля.
| US 4054881, 18.10.1977 | |||
| СПОСОБ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2000 |
|
RU2197013C2 |
| US 4849692, 18.07.1989 | |||
| УСТРОЙСТВО И СПОСОБ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ МОБИЛЬНОГО РОБОТА | 2004 |
|
RU2279343C2 |

