Область техники, к которой относится изобретение
Настоящее изобретение относится к мобильным роботам, в частности к устройству и способу корректировки положения мобильного робота.
Описание предшествующего уровня техники
Обычно мобильный робот, в частности робот-уборщик, представляет собой устройство для автоматической очистки очищаемой области путем всасывания с пола инородных веществ, таких как пыль, в процессе самостоятельного перемещения вдоль поверхности стен комнаты в доме (например, в гостиной, внутренних комнатах и т.п.) без какого-либо управления со стороны пользователя.
Робот-уборщик определяет расстояние между собой и препятствиями, такими как мебель, офисное оборудование, стены и т.п. в очищаемой области при помощи датчика расстояния. В соответствии с определенным расстоянием робот-уборщик выборочно запускает двигатель для приведения в движение своего левого колеса и двигатель для приведения в движение своего правого колеса, таким образом самостоятельно меняя направление и убирая очищаемую область. Робот-уборщик осуществляет уборку, перемещаясь по очищаемой области благодаря картографической информации, хранящейся во внутреннем запоминающем устройстве.
Далее описывается процесс картографирования для формирования картографической информации.
Вначале робот-уборщик перемещается вдоль боковой поверхности рабочего пространства (например, поверхности стены гостиной) для того, чтобы рассчитать расстояние и направление от себя до зарядного устройства, установленного на стене, и сканирует рабочее пространство, определяя свое положение на основе вычисленного значения расстояния и направления. Робот-уборщик выявляет свое текущее положение, используя установленное на колесе кодирующее устройство.
Робот-уборщик определяет, есть ли препятствие между ним и зарядным устройством. Если препятствия нет, то робот-уборщик сканирует рабочее пространство, передавая/принимая сигнал на/от зарядного устройства. С другой стороны, если между роботом-уборщиком и зарядным устройством есть препятствие, то робот-уборщик сначала сканирует другое рабочее пространство. Затем, когда препятствие устранено, робот-уборщик сканирует рабочее пространство в том месте, где было устранено препятствие, передавая/принимая сигнал на/от зарядного устройства.
Однако для такого способа определения положения робота-уборщика путем использования кодирующего устройства характерна проблема, состоящая в том, что, поскольку текущее положение робота-уборщика определяется при помощи кодирующего устройства, установленного на его колесе, могут возникать ошибки из-за скольжения колеса или холостого вращения.
В другом способе определения положения робота-уборщика, известном из уровня техники, в рабочем пространстве (например, на поверхности стены гостиной) на определенном расстоянии устанавливаются наклейки или отражающие пластинки одинаковой формы, и робот-уборщик опознает наклейки или отражающие пластинки, используя камеру на приборах с зарядовой связью (ПЗС, CCD), чтобы таким образом исправить ошибку, возникающую из-за скольжения колеса и холостого вращения, и узнает расстояние между собой и зарядным устройством. Однако способу определения положения робота-уборщика при помощи наклейки или отражающей пластинки также присуща проблема, заключающаяся в том, что ошибка в расстоянии накапливается, если меняется яркость освещения очищаемого рабочего пространства или опознается предмет, имеющий форму, близкую к форме наклейки или отражающей пластины.
Кроме того, если яркость освещения становится меньше или больше, чем пороговая величина, робот-уборщик не может проверить свое положение, поскольку камера на ПЗС не может опознать наклейку или отражающую пластину. Поскольку камера на ПЗС устанавливается на робота-уборщика, возрастает стоимость его изготовления.
Технологии, относящиеся к роботу-уборщику, известные из уровня техники, раскрыты в патентах США 5440216 и 5646494.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Таким образом, задачей настоящего изобретения является создание устройства и способа корректировки положения мобильного робота, позволяющих безошибочно исправлять ошибку положения, возникающую при движении робота, путем приема сигнала положения, уведомляющего о заранее определенном месте очищаемой области, и корректировки текущей информации положения мобильного робота на основе предварительно сохраненной информации положения, соответствующей принятому сигналу положения.
Для того чтобы обеспечить эти и другие преимущества и в соответствии с задачей настоящего изобретения, которое описано здесь достаточно широко и для которого представлен вариант осуществления, предусмотрено устройство для корректировки положения мобильного робота, содержащее: средство уведомления о положении, установленное в заранее определенном месте конкретной области, для генерирования сигнала положения, уведомляющего об этом заранее определенном месте; средство обнаружения сигнала положения, установленное в заранее определенном месте мобильного робота для обнаружения сигнала положения; и средство управления, установленное в заранее определенном месте мобильного робота для корректировки положения мобильного робота на основе предварительно сохраненной информации положения, соответствующей принятому сигналу положения.
Вышеуказанные и иные задачи, признаки, аспекты и преимущества настоящего изобретения станут более ясны из нижеследующего подробного описания настоящего изобретения в совокупности с сопровождающими чертежами.
ПЕРЕЧЕНЬ ФИГУР ЧЕРТЕЖЕЙ
Сопровождающие чертежи, включенные для того, чтобы способствовать лучшему пониманию изобретения, и составляющие часть описания, иллюстрируют варианты осуществления изобретения и вместе с описанием служат для объяснения принципов изобретения.
На чертежах:
фиг.1 - схематичное изображение структуры устройства корректировки положения мобильного робота в соответствии с настоящим изобретением;
фиг.2 - конструктивный вид, на котором в деталях показан блок уведомления о положении и блок обнаружения сигнала положения в соответствии с настоящим изобретением.
Фиг.3 - блок-схема последовательности операций способа корректировки положения мобильного робота в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Далее со ссылкой на фиг.1-3 описывается предпочтительный вариант осуществления устройства и способа корректировки положения мобильного робота, позволяющих безошибочно исправлять ошибку в определении положения, возникающую при движении мобильного робота, путем приема сигнала положения, уведомляющего о заранее определенном месте очищаемой области, и корректировки текущей информации положения мобильного робота на основе предварительно сохраненной информации положения, соответствующей принятому сигналу положения.
На фиг.1 приведено схематичное изображение структуры устройства для корректировки положения мобильного робота в соответствии с настоящим изобретением.
Как показано на чертеже, устройство для корректировки положения мобильного робота в соответствии с настоящим изобретением включает в себя по меньшей мере один блок 1-5 уведомления о положении, установленный в заранее определенном месте конкретной области, подлежащей уборке (например, гостиной, комнаты, офиса), для генерирования сигнала положения для уведомления об этом заранее определенном месте; блок 10 обнаружения сигнала положения, установленный в заранее определенном месте мобильного робота для обнаружения сигнала положения; и блок управления (не показан), установленный в заранее определенном месте мобильного робота для корректировки ошибки положения, возникающей при движении мобильного робота, на основе предварительно сохраненной информации положения, соответствующей принятому сигналу положения.
Далее со ссылкой на фиг.2 и 3 подробно описана работа устройства корректировки положения мобильного робота в соответствии с настоящим изобретением.
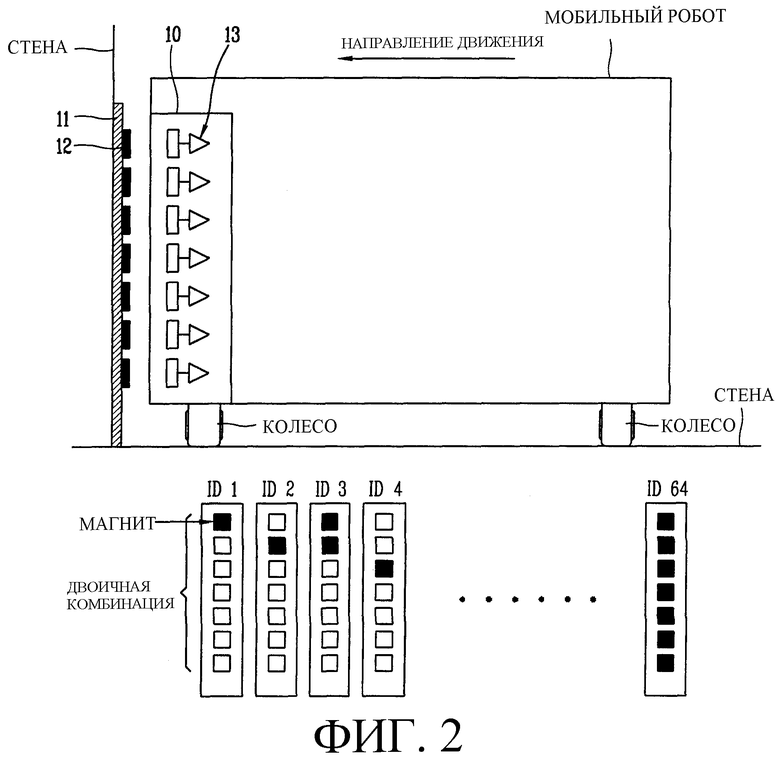
На фиг.2 приведен конструктивный вид, на котором показан блок 1-5 уведомления о положении и блок 10 обнаружения сигнала положения в соответствии с настоящим изобретением.
Как показано на чертеже, блок уведомления о положении (например, блок 1 уведомления о первом положении) включает в себя устройство 11 для крепления магнитов и один или более постоянных магнитов 12, установленных на устройстве 11 для крепления магнитов в двоичной комбинации. Может быть установлен один постоянный магнит 12 или множество постоянных магнитов, причем постоянный магнит 12 устанавливается на устройстве 11 для крепления магнитов в двоичной комбинации для генерации магнитного поля, соответствующего двоичному значению. Например, предполагая, что блок 1 уведомления о положении является блоком 1 уведомления о первом положении, двоичное значение, т.е. сигнал положения блока 1 уведомления о первом положении, представляет собой '010', и на устройстве 11 для крепления магнитов, где через регулярные интервалы можно установить семь постоянных магнитов (например, в первое - седьмое положения), постоянный магнит 12 устанавливается только во втором положении на устройстве 11 для крепления магнитов, но не в других положениях (имеются в виду первое и с третьего по седьмое положения).
Блок 10 обнаружения сигнала положения включает в себя множество магнитных датчиков 13 (например, семь магнитных датчиков), которые обнаруживают магнитное поле, генерируемое одним или более постоянными магнитами 12, преобразуют магнитное поле в электрический сигнал ('1' или '0') и выдают электрический сигнал. Магнитный датчик, обнаруживший магнитное поле, выдает '1', а магнитный датчик, не обнаруживший магнитное поле, выдает '0'. Кроме того, магнитные датчики устанавливаются на мобильном роботе в соответствии с первым - седьмым положениями. Электрический сигнал ('1' и '0') преобразуется в двоичное значение блоком управления.
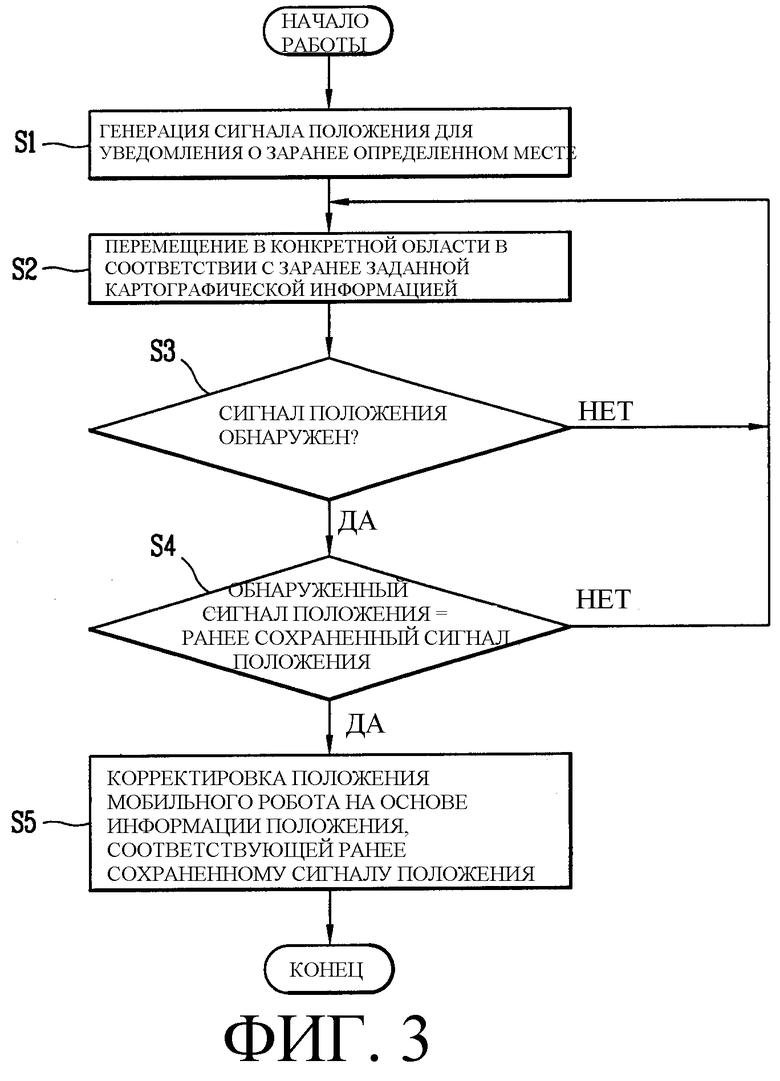
На фиг.3 показана блок-схема последовательности операций способа корректировки положения мобильного робота в соответствии с настоящим изобретением.
Как показано на этой схеме, способ корректировки положения мобильного робота в соответствии с настоящим изобретением включает в себя следующие этапы: генерация сигнала положения для уведомления о заранее определенном месте конкретной области; обнаружение сигнала положения, передвижение мобильного робота в конкретную область на основе предварительно заданной картографической информации; сравнение обнаруженного сигнала положения и предварительно сохраненного сигнала положения; исправление ошибки в текущем положении мобильного робота на основе результатов сравнения.
Вначале блоки 1-5 уведомления о положении устанавливаются в заранее определенных местах (например, на стене) конкретной области, в частности, области, подлежащей уборке (например, гостиной, комнате, офисе), и они генерируют сигнал положения для уведомления об упомянутом заранее определенном месте. Каждый блок уведомления о положении включает в себя устройство 11 для крепления магнитов и один постоянный магнит 12 или множество постоянных магнитов 12, закрепленных на устройстве 11 для крепления магнитов через регулярные интервалы. Кроме того, постоянный магнит 12 устанавливается на устройстве 11 для крепления магнитов в двоичной комбинации для обеспечения возможности различения одно от другого среди множества заранее определенных мест. Например, если постоянный магнит 12 установлен на устройстве 11 для крепления магнитов в двоичной комбинации, то постоянный магнит 12 генерирует магнитное поле, соответствующее двоичному значению. Соответственно блок уведомления о положении (например, блок 1 уведомления о первом положении) уведомляет о заранее заданном месте (например, о местоположении блока 1 уведомления о первом положении) и выдает внутренний идентификатор (ID), двоичное значение, соответствующее магнитному полю, для того чтобы отличить это заранее заданное место от других заранее заданных мест (например, 2-5 блоков уведомления о втором - пятом положениях). Внутренний ID соответствует сигналу положения.
Кроме того, блок 1-5 уведомления о положении может быть установлен на поверхности стены. Предпочтительно, блок уведомления о положении (блоки уведомления о первом-пятом положениях) устанавливается на одной их двух прилегающих стен так, что мобильный робот может без труда искать местоположение блока уведомления о положении (одного из блоков уведомления о втором - пятом положениях).
После этого при движении мобильного робота в очищаемой области в соответствии с картографической информацией, заранее заданной командой пользователя (S2) блок 10 обнаружения сигнала положения обнаруживает сигнал положения (присущая ID) и выдает обнаруженный сигнал положения на блок управления (не показан)(S3). Предпочтительно, в качестве блока 10 обнаружения сигнала положения используется магнитный датчик 13. Множество магнитных датчиков 13, установленных в блоке 10 обнаружения сигнала положения, обнаруживает магнитное поле, генерируемое постоянным магнитом 12, входящим в блок 1-5 уведомления о положении, преобразует магнитное поле в электрический сигнал и выдает электрический сигнал на блок управления. Магнитный датчик 13 устанавливается на мобильном роботе в соответствии с постоянным полем 12 для того, чтобы обнаруживать магнитное поле, генерируемое постоянным магнитом 12.
Блок управления (не показан) сравнивает обнаруженный сигнал положения с предварительно сохраненным сигналом положения. Если обнаруженный сигнал положения идентичен предварительно сохраненному сигналу положения, то блок управления исправит ошибку текущего положения мобильного робота исходя из заранее сохраненной информации положения, соответствующей идентичному заранее сохраненному сигналу положения. Например, блок управления преобразует электрический сигнал в двоичное значение и сравнивает преобразованное двоичное значение (сигнал положения) с заранее сохраненными двоичными значениями (заранее сохраненным сигналом положения). Если преобразованное двоичное значение (сигнал положения) идентично одному из заранее сохраненных двоичных значений (S4), то блок управления скорректирует текущее положение мобильного робота на основе информации положения (например, информации положения блока 1 уведомления о первом положении), соответствующей идентичному заранее сохраненному значению (S5). То есть блок управления мобильного робота применяет скорректированную информацию положения к заранее заданной картографической информации, таким образом передвигая мобильного робота по конкретной области таким же образом, что и в соответствии с известным уровнем техники. Информация положения блоков уведомления о первом - пятом положениях заранее сохранена в запоминающем устройстве (не показано), которое установлено в блоке управления.
Всякий раз, когда заранее установленное время для исправления ошибки положения мобильного робота истекает, блок управления мобильного робота выбирает ближайший блок уведомления о положении, основываясь на заранее заданной картографической информации, и перемещает мобильного робота вдоль поверхности стены. Когда мобильный робот достигнет выбранного блока уведомления о положении, блок управления примет сигнал положения, сгенерированный выбранным блоком 1-5 уведомления о положении для того, чтобы таким образом исправить ошибку положения мобильного робота. Предпочтительно, когда мобильный робот достигнет блока уведомления о положении, скорость мобильного робота уменьшается для того, чтобы безошибочно обнаружить сигнал положения (магнитное поле), генерируемый блоком уведомления о положении.
Как это описано выше, устройство и способ корректировки положения мобильного робота в соответствии с настоящим изобретением позволяет исправить ошибку положения, возникающую при движении робота, путем установки множества постоянных магнитов в заранее определенных местах очищаемой области в двоичной комбинации и распознавания и различения заранее определенного места на основе магнитного поля, генерируемого постоянным магнитом. То есть настоящее изобретение позволяет безошибочно исправлять ошибку положения (накопленную ошибку положения), возникающую из-за скольжения колеса мобильного робота или его холостого вращения.
Поскольку настоящее изобретение может иметь несколько различных вариантов осуществления, не выходя при этом за пределы сущности или существенных признаков изобретения, следует понимать, что вышеописанные варианты осуществления не ограничиваются никакими деталями вышеприведенного описания, если не оговорено иначе, и должны толковаться достаточно широко в пределах существа и объема изобретения так, как это определено в прилагаемой формуле изобретения. Все изменения и модификации, попадающие в пределы и границы формулы изобретения, или эквиваленты этих пределов и границ считаются охваченными прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ-УБОРЩИК (ВАРИАНТЫ), РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ ИМИ | 2003 |
|
RU2242159C1 |
| РОБОТ-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ ТАКОВЫМ | 2013 |
|
RU2540058C2 |
| ДВИЖУЩИЙСЯ ПРЕДМЕТ, СПОСОБНЫЙ РАСПОЗНАВАТЬ ИЗОБРАЖЕНИЕ, И СИСТЕМА НАВЕДЕНИЯ ДВИЖУЩЕГОСЯ ПРЕДМЕТА, ОСНАЩЕННАЯ ТАКОВЫМ | 2006 |
|
RU2321879C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ УБОРКИ, РОБОТ-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ-УБОРЩИКОМ | 2014 |
|
RU2620236C1 |
| СПОСОБ КОРРЕКЦИИ ГИРОСКОПИЧЕСКОГО ДАТЧИКА РОБОТА-УБОРЩИКА | 2005 |
|
RU2295704C2 |
| СПОСОБ КОРРЕКЦИИ КООРДИНАТ РОБОТА-УБОРЩИКА И АВТОМАТИЧЕСКАЯ СИСТЕМА УБОРКИ С ИСПОЛЬЗОВАНИЕМ ЭТОГО СПОСОБА | 2005 |
|
RU2283750C1 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА ЧИСТКИ, БАЗОВАЯ СТАНЦИЯ И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2019 |
|
RU2777408C1 |
| Робот-уборщик и способ очистки | 2019 |
|
RU2775535C1 |
| ПОДВИЖНЫЙ РОБОТ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2020 |
|
RU2782395C1 |
| СИСТЕМА РОБОТА, СПОСОБНАЯ ОПРЕДЕЛИТЬ ОБЛАСТЬ ПЕРЕМЕЩЕНИЯ | 2005 |
|
RU2321487C2 |
Изобретение относится к робототехнике. Технический результат - повышение точности позиционирования мобильного робота. Согласно изобретению способ корректировки положения мобильного робота включает изменение его положения, для чего генерируют сигнал положения для уведомления о заранее определенном месте конкретной области, обнаруживают сигнал положения и корректируют положение мобильного робота на основе заранее сохраненной информации о положении, соответствующей обнаруженному сигналу положения. Устройство корректировки положения мобильного робота содержит средство управления, установленное в определенном месте мобильного робота. Кроме того, устройство снабжено одним или более средствами уведомления о положении, установленными в заранее определенных местах конкретной области для генерации сигналов положения, уведомляющих об этих заранее определенных местах, средством обнаружения сигнала положения, установленным в заранее определенном месте мобильного робота. Причем средство управления выполнено с возможностью выработки сигналов для корректировки положения мобильного робота на основе заранее сохраненной информации положения, соответствующей обнаруженному сигналу положения. 2 н. и 17 з.п. ф-лы, 3 ил.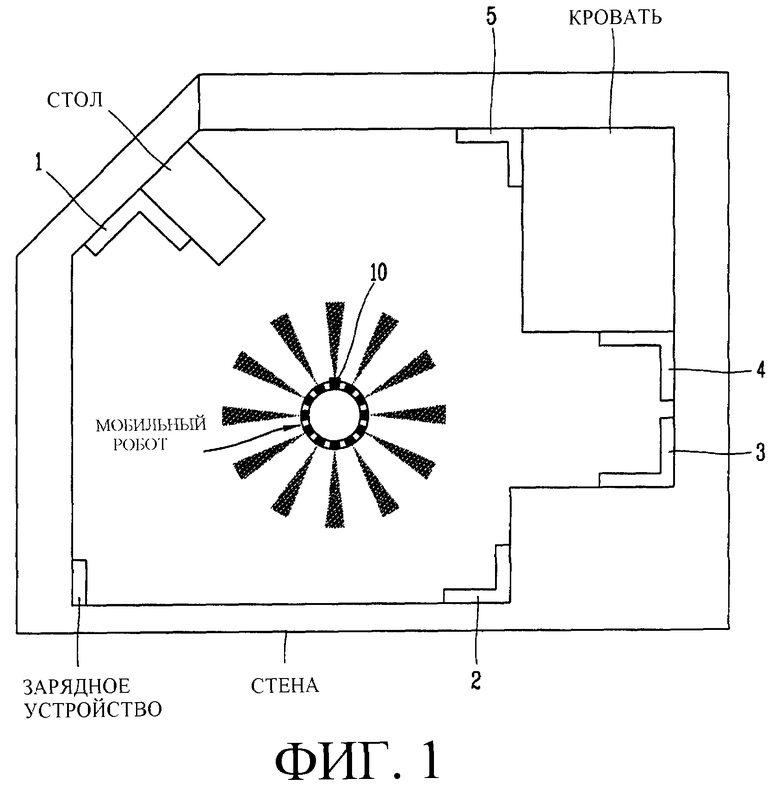
| МОБИЛЬНЫЙ РОБОТ И СПОСОБ КОРРЕКТИРОВКИ ЕГО КУРСА | 2001 |
|
RU2210492C2 |
| СПОСОБ РАБОТЫ РАКЕТНОГО ДВИГАТЕЛЯ И РАКЕТНЫЙ ДВИГАТЕЛЬ РОМАНОВА | 2007 |
|
RU2380563C2 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 5787545 A, 04.08.1998 | |||
| МОБИЛЬНЫЙ ПЫЛЕОТСАСЫВАЮЩИЙ АППАРАТ | 1992 |
|
RU2019120C1 |

