Изобретение относится к океанографии, конкретнее к автономным нодводным зондам погружения и автоматического всплытия на заданной глубине.
Целью изобретения является повышение надежности.
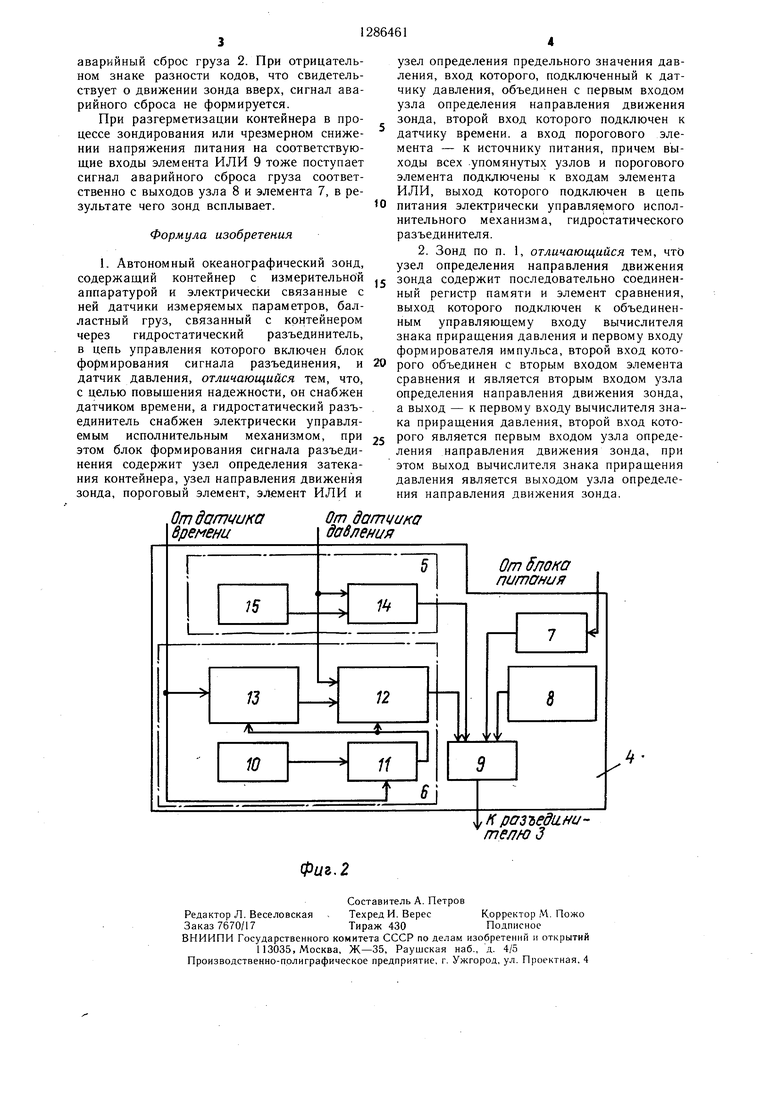
На фиг. 1 изображен автономный океанографический зонд, общий вид; на фиг. 2 - структурная схема блока формирования сигнала разъединения,
Автономный океанографический зонд Ю (фиг, 1) содержит контейнер 1 с измерительной аппаратурой, установленный в обте- каемо.м корпусе, датчики измеряемых параметров, вынесенные за пределы корпуса
ные значения соответственно кода давления окончания зондирования и кода продолжительности зондирования, после чего начинается процесс зондирования. Продолжительность зондирования определяется исходя из знаний о необходимой для данного эксперимента глубины зондирования и скорости погружения зонда. В процессе зондирования элемент 14 осуществляет непрерывное сравнение текущего кода давления с кодом давления окончания зондирования, занесенным в регистр 15, а элемент 11 - текущего кода времени с кодом продолжительности зондирования. Кроме того, непрерывно контролируются состояние
с помощью щтанги, балластный груз 2,j, автономного блока питания с помощью по- связанный через гидростатический разъе-рогового элемента 7 и герметичность кон- динитель 3 с контейнером 1, и блок 4 фор-тейнера 1 с измерительной аппаратурой с мирования сигнала разъединения, Разъе-ио.мощью узла 8 сигнализации затекания, динитель 3 выполнен в виде гидростатичес-В случае исправности автономного блока кого размыкателя с электромагнитным кла-питания и отсутствия разгерметизации кон- паном.20 тейнера процесс погружения зонда продол- Блок 4 (фиг. 2) содержит узел 5 опре-жается до момента срабатывания разъеди- деления предельного значени-я давления,нителя 3 от воздействия гидростатического узел 6 определения аварийной ситуации,давления на глубине, соответствующей по- пороговый элемент 7, узел 8 сигнализацииложению органов управления механизмом затекания контейнера 1 и элемент ИЛИ 9,25 разъединителя 3. входы которого подключены к выходам уз- лов 5, 6 и 8 и порогового элемента 7, входы которых подключены соответственно, к
Однако, когда зонд опустился до заданной глубины, а разъединитель 3 не сработал, например, вследствие перекоса деталей, то процесс погружения зонда в этом случае будет продолжаться до того момента.
датчикам давления, времени, затекания и блоку питания, а выход элемента ИЛИ 9
Однако, когда зонд опустился до заданной глубины, а разъединитель 3 не сработал, например, вследствие перекоса деталей, то процесс погружения зонда в этом случае будет продолжаться до того момента.
подключен в цепь питания электромагнит- 30 когда на элементе 14 текущий код давления
ного клапана разъединителя 3.
При этом узел 6 содержит последовательно соединенные регистр 10 памяти и элемент 11 сравнения, выход которого подключен к объединенным управляющему вхосовпадет с кодом давления окончания зондирования, при этом на выходе элемента 14 и, соответственно, одном из входов элемента ИЛИ 9 появится сигнал, который поступает в цепь питания электромагнитного
ду вычислителя 12 разности давлений и пер- 35 клапана разъединителя, и последний осу- вому входу формирователя 13 временного ществляет аварийный сброс балластного интервала, второй вход которого объединен с вторым входом элемента 11 и является.
груза 2.
Кроме того, на элементе 11 происходит сравнение кода текущего времени и кода
вторым входом узла 6, связанным с датКроме того, на элементе 11 происходит сравнение кода текущего времени и кода
чиком времени, выход формирователя 13 до продолжительности зондирования, занесенного в регистр 10. При совпадении кодов на выходе элемента 11 формируется сигнал, по которому текущий код давления запоминается Б вычислителе 12 и одновременно начинается отсчет текущего времени в форподключен к первому входу вычислителя 12, второй вход которого является первым входом узла 6, связанным с датчиком давления, а выход вычислителя 12 является выходом узла 6.
Узел 5 выполнен, например, в виде45 мирователе 13. зшемента 14 сравнения, входы которого под-После окончания задаваемого формиро- ключены соответственно к регистру 15 па-вателем 13 промежутка времени (2-5с), мяти и датчику давления.в течение которого зонд продолжает дви- Узел 8 может быть выполнен, например,жение, по сигналу с выхода формирователя в виде двух изолированных и расположенныхд 13 производится запись нового текущего в непосредственной близости друг от другакода давления в вычислитель 12, где про- пластин, сопротивление между которымиизводится вычитание первого записанного уменьщается при попадании на них воды.значения из второго значения текущего кода Автономный океанографический зонддавления. Если знак разности кодов ока- работает следующим образом.зывается положительным, что свидетель- Перед началом зондирования с внеш-55 ствует о процессе движения зонда вниз, него устройства, например программатора,то на один из входов элемента ИЛИ 9 по- Е1 регистры 10 и 15 памяти заносятся расчет-ступает сигнал, который осуществляет
ные значения соответственно кода давления окончания зондирования и кода продолжительности зондирования, после чего начинается процесс зондирования. Продолжительность зондирования определяется исходя из знаний о необходимой для данного эксперимента глубины зондирования и скорости погружения зонда. В процессе зондирования элемент 14 осуществляет непрерывное сравнение текущего кода давления с кодом давления окончания зондирования, занесенным в регистр 15, а элемент 11 - текущего кода времени с кодом продолжительности зондирования. Кроме того, непрерывно контролируются состояние
автономного блока питания с помощью по- рогового элемента 7 и герметичность кон- тейнера 1 с измерительной аппаратурой с ио.мощью узла 8 сигнализации затекания, В случае исправности автономного блока питания и отсутствия разгерметизации кон- тейнера процесс погружения зонда продол- жается до момента срабатывания разъеди- нителя 3 от воздействия гидростатического давления на глубине, соответствующей по- ложению органов управления механизмом разъединителя 3.
Однако, когда зонд опустился до заданной глубины, а разъединитель 3 не сработал, например, вследствие перекоса деталей, то процесс погружения зонда в этом случае будет продолжаться до того момента.
совпадет с кодом давления окончания зондирования, при этом на выходе элемента 14 и, соответственно, одном из входов элемента ИЛИ 9 появится сигнал, который поступает в цепь питания электромагнитного
клапана разъединителя, и последний осу- ществляет аварийный сброс балластного
клапана разъединителя, и последний осу- ществляет аварийный сброс балластного
груза 2.
Кроме того, на элементе 11 происходит сравнение кода текущего времени и кода
продолжительности зондирования, занесенного в регистр 10. При совпадении кодов на выходе элемента 11 формируется сигнал, по которому текущий код давления запоминается Б вычислителе 12 и одновременно начинается отсчет текущего времени в формирователе 13. После окончания задаваемого формиро- вателем 13 промежутка времени (2-5с), в течение которого зонд продолжает дви- жение, по сигналу с выхода формирователя 13 производится запись нового текущего кода давления в вычислитель 12, где про- изводится вычитание первого записанного значения из второго значения текущего кода давления. Если знак разности кодов ока- зывается положительным, что свидетель- ствует о процессе движения зонда вниз, то на один из входов элемента ИЛИ 9 по- ступает сигнал, который осуществляет
аварийный сброс груза 2. При отрицательном знаке разности кодов, что свидетельствует о движении зонда вверх, сигнал аварийного сброса не формируется.
При разгерметизации контейнера в процессе зондирования или чрезмерном снижении напряжения питания на соответствующие входы элемента ИЛИ 9 тоже поступает сигнал аварийного сброса груза соответственно с выходов узла 8 и элемента 7, в результате чего зонд всплывает.
Формула изобретения 1. Автономный океанографический зонд,
узел определения предельного значения давления, вход которого, подключенный к датчику давления, объединен с первым входом узла определения направления движения зонда, второй вход которого подключен к датчику времени, а вход порогового элемента - к источнику питания, причем выходы всех упомянутых узлов и порогового элемента подключены к входам элемента ИЛИ, выход которого подключен в цепь О питания электрически управляемого исполнительного механизма, гидростатического разъединителя.
2. Зонд по п. 1, отличающийся тем, что узел определения направления движения
содержащий контейнер с измерительной зонда содержит последовательно соединенаппаратурои и электрически связанные с ней датчики измеряемых параметров, балластный груз, связанный с контейнером через гидростатический разъединитель, в цепь управления которого включен блок
ный регистр памяти и элемент сравнения, выход которого подключен к объединенным управляющему входу вычислителя знака приращения давления и первому входу формирователя импульса, второй вход котоформирования сигнала разъединения, и20 рого объединен с вторым входом элемента
датчик давления, отличающийся тем, что,сравнения и является вторым входом узла
с целью повыщения надежности, он снабженопределения направления движения зонда,
датчиком времени, а гидростатический разъ-а выход - к первому входу вычислителя знаединитель снабжен электрически управля-ка приращения давления, второй вход котоемым исполнительным механизмом, при25 рого является первым входом узла опредеэтом блок формирования сигнала разъеди-ления направления движения зонда, при
нения содержит узел определения затека-этом выход вычислителя знака приращения
ния контейнера, узел направления движениядавления является выходом узла определезонда, пороговый элемент, элемент ИЛИ иния направления движения зонда.
узел определения предельного значения давления, вход которого, подключенный к датчику давления, объединен с первым входом узла определения направления движения зонда, второй вход которого подключен к датчику времени, а вход порогового элемента - к источнику питания, причем выходы всех упомянутых узлов и порогового элемента подключены к входам элемента ИЛИ, выход которого подключен в цепь питания электрически управляемого исполнительного механизма, гидростатического разъединителя.
2. Зонд по п. 1, отличающийся тем, что узел определения направления движения
зонда содержит последовательно соединен зонда содержит последовательно соединенный регистр памяти и элемент сравнения, выход которого подключен к объединенным управляющему входу вычислителя знака приращения давления и первому входу формирователя импульса, второй вход кото рого объединен с вторым входом элемента
Отдатчика Времени
От датчика давления
От блока питания
к разъединителю 3
Фиг. 2
Составитель А. Петров
Редактор Л. Веселовская - Техред И. ВересКорректор М. Пожо
Заказ 7670/17Тираж 430Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений ii открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная. 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического отбора проб воды на заданных глубинах | 1983 |
|
SU1112257A1 |
| Зондирующее устройство для измерения параметров водной среды | 1978 |
|
SU742783A1 |
| ГИДРОАКУСТИЧЕСКИЙ БУЙ ДЛЯ ИССЛЕДОВАНИЯ МИРОВОГО ОКЕАНА | 2005 |
|
RU2297940C2 |
| Автономный океанографический зонд | 1973 |
|
SU714328A1 |
| Устройство для определения распределения солености воды | 1990 |
|
SU1755157A1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2365940C1 |
| Система измерения интегральной скорости течения | 1989 |
|
SU1673984A1 |
| Зондирующее устройство для измерения гидрофизических параметров водной среды | 1985 |
|
SU1287085A1 |
| ЗОНДИРУЮЩИЙ КОМПЛЕКС | 2023 |
|
RU2828192C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
Изобретение относится к автономным устройствам, обеспечивающим погружение и автоматическое всплытие на заданной глубине. Цель изобретения - повышение надежности. Автоматический океанографический зонд содержит контейнер I с измерительной аппаратурой, электрически связанные с ней датчики измеряемых параметров, балластный груз 2, связанный с контейнером 1 через гидростатический разъединитель 3, выполненный с электромагнитным клапаном, и блок 4 формирования сигнала разъединения. Блок 4 содержит узел определения предельного значения давления, узел определения аварийной ситуации, узел затекания контейнера 1, пороговый элемент и элемент ИЛИ. Входы узлов и порогового элемента подключены соответственно к датчикам давления, времени, затекания и блоку питания, а выходы - к входам элемента ИЛИ, выход которого подключен к цепи питания электромагнитного клапана разъединителя 3. I 3. п. ф-лы, 2 ил. Ф (Л 1чЭ 00 ot 4 О) .7
| Автономный подводный зонд для погружения и автоматического всплытия на заданной глубине | 1978 |
|
SU718322A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
