Изобретение относится к области морской техники и предназначено для навигационного оборудования морских районов и обеспечения безопасности кораблевождения и определения координат в море надводных кораблей, судов, подводных объектов.
Навигационное оборудование морского района представляет собой систему специальных береговых и плавучих сооружений, конструкций и устройств, предназначенных для обеспечения безопасности кораблевождения (судовождения) и служит для определения координат кораблей и судов в море, их правильной ориентировки во время плавания в прибрежных и мелководных районах. Средствами навигационного оборудования служат береговые и плавучие маяки, светящиеся и несветящиеся знаки, навигационные огни, плавучие предостерегающие знаки (буи и вехи), радио-, радиолокационные и гидроакустические маяки, наземные станции радионавигационных систем и другие средства [1].
Наиболее сложным является обеспечение безопасности плавания и точной ориентировки под водой подводных плавсредств, так как большая часть средств навигационного оборудования установлена на поверхности воды или на берегу. Поэтому для обеспечения подводных плавсредств навигационными данными находят применение гидроакустические или акустические рефлекторы (АР) и буи-маяки.
Известен акустический рефлектор, принятый за аналог изобретения. Он имеет сердечник и оболочку. При облучении рефлектора акустической волной им генерируется встречный более мощный акустический эхосигнал. Для этого в оболочке рефлектора сделано одно большое отверстие и по кругу от него - ряд небольших, через которые рефлектор при погружении заполняется водой. Отверстия представляют собой окна передачи акустической энергии: небольшие - для входного сигнала, а большое центральное - для выходного. Толщина оболочки и размеры сердечника зависят от рабочих частот рефлектора. Падающие на оболочку рефлектора акустические волны передаются через маленькие окна на сердечник и заднюю стенку оболочки, где фокусируются и отражаются в сторону выходного центрального окна. Одновременно в стенке оболочки генерируются находящиеся с ними в одной фазе мощные упругие волны. В результате сложения отраженных от задней стенки оболочки и сфокусированных в выходное окно звуковых волн с упругими волнами, распространяемыми в ее стенке, и формируется более мощный обратный акустический эхосигнал [2].
В зависимости от используемых материалов, размеров и формы акустического рефлектора он способен при облучении гидролокатором с известными характеристиками подавлять своей передней поверхностью оболочки акустическую волну, отражаемую от задней поверхности или, наоборот, делать ее «слышимой», обеспечивая идентификацию данного акустического рефлектора [2], [3].
Использование нескольких отдельных акустических окон в стенке оболочки акустического рефлектора позволяет в результате конструктивного объединения соответствующих отраженных выходных акустических сигналов формировать усиленный выходной акустический сигнал на одной или более заранее заданных частотах [4, с. 7]. Рефлектор может быть настроен на заданную частоту путем соответствующего выбора основного диаметра и толщины оболочки и свойств соответствующих материалов каждого компонента, обеспечивающих необходимую акустическую скорость распространения волны внутри материала сердечника и возможность конструктивной интерференции между двумя сфокусированными эхосигналами, проходящими по акустическим каналам разной длины.
Для создания признака или признаков с высокой распознаваемостью в усиленном отраженном выходном акустическом сигнале используется концепция объединения волн, пропускаемых через оболочку рефлектора, с волнами, получаемыми за счет внутренней фокусировки, в результате которого, выходной сигнал приобретает специфическую временную характеристику или специфический спектральный состав. При этом соответствующее фазирование двух эхосигналов от оболочки в результате геометрической фокусировки, а также от внешней оболочки из-за упругих волн, обеспечивается специфический частотный резонанс, «окрашивающий» эхосигнал.
Указанные свойства акустического рефлектора позволяют распознавать его на фоне других подводных объектов в окружающей среде, в том числе, с высоким уровнем помех, что определяет следующие области его применения [4]:
- маркировка точек географического положения различных подводных объектов: трубопроводов, силовых и телефонных кабелей, объектов навигационного оборудования, опасных донных объектов, участков подводных нефтяных или газовых платформ и др.;
- маркировка или установление границ зон экономического или коммерческого интереса;
- идентификация потерянных в результате происшествий или упавших за борт судна ценных контейнеров, а также определение местонахождения черных ящиков самолетов;
- контроль геофизических структур и другие.
Размер акустического рефлектора выбирается в зависимости от размеров обозначаемого им подводного объекта. Так, например, для маркировки водолазов или морских животных обычно используются акустические рефлекторы размером от 50 до 100 мм [4].
Акустические рефлекторы имеют и другие достоинства, например, они не требуют для излучения сигналов источников тока и не производят собственных шумов.
В качестве недостатка отмечается, что для навигационного оборудования ими морских районов требуется привлекать надводные суда и другие носители и средства, имеющие соответствующее навигационное оборудование. Это привлекает к району внимание нежелательных наблюдателей и увеличивает стоимость и сроки работ. Данный недостаток обусловлен отсутствием возможности акустического рефлектора самостоятельно передвигаться в воде.
Известен мобильный гидроакустический буй-маяк (ГБМ), принятый за прототип изобретения, имеющий источник тока, аппаратуру управления, всплывающий поплавок с антенной и приемником спутниковой системы навигации типа ГЛОНАСС и аппаратуру приема и излучения гидроакустических сигналов [5], [6]. ГБМ размещается в отдельном модуле автономного необитаемого подводного аппарата (АНПА), имеющего бортовую систему управления, устройства связи и навигации, энергосиловую установку с источником энергии и двигателем, движитель, приводы рулевых машинок и наружное оперение с рулями. Дополнительно модуль оборудуется устройством отделения всплывающего поплавка от АНПА и возвращения его обратно с приводом и катушкой с кабелем, связывающим приемник спутниковой системы навигации, расположенной в поплавке, с аппаратурой управления буя, а также устройством распознавания сигналов запроса своих сил для разрешения передачи запрашиваемой ими информации, шифратором, преобразующим информацию для предотвращения ее восстановления в случае перехвата посторонними объектами и дешифратором, осуществляющим обратное преобразование информации, вычислительным устройством и датчиками гидростатического и гидродинамического давления, служащими для расчета скорости дрейфа мобильного гидроакустического буя-маяка при его покладке на грунт, направления и величины горизонтального сноса поплавка относительно точки постановки.
Недостатками мобильного ГБМ являются относительно небольшая продолжительность эксплуатации вследствие использования источника тока для передачи информации на объекты навигации, который постепенно разряжается и приходит в негодность. Другим его недостатком служит собственное излучение сигналов, демаскирующее его работу.
Целью изобретения является разработка мобильного акустического рефлектора на базе АНПА, который имеет возможность самостоятельно прибыть в назначенный район, занять точку с требуемыми координатами или найти заданный подводный объект и установить в необорудованной заранее позиции акустический рефлектор в качестве навигационного ориентира.
Для достижения цели изобретения предлагается акустический рефлектор мобильный, представляющий собой автономный необитаемый подводный аппарат, имеющий бортовую систему управления и бортовую навигационную систему, гидролокатор, источник тока, энергосиловую установку с источником энергии и двигателем, движитель, приводы рулевых машинок и наружное оперение с рулями, антенну и приемник спутниковой системы навигации типа ГЛОНАСС, связанные с бортовой системой управления, вычислительное устройство и датчики гидростатического и гидродинамического давления.
Подводный аппарат имеет отсек, в котором размещается акустический рефлектор и устройства его приведения в рабочее положение, включающие надувной буй, газогенератор, катушку с кабель-тросом и приводом, а также балластный отсек с пиротехническим клапаном.
Устройство акустического рефлектора мобильного и его работа показаны на фиг. 1-5.
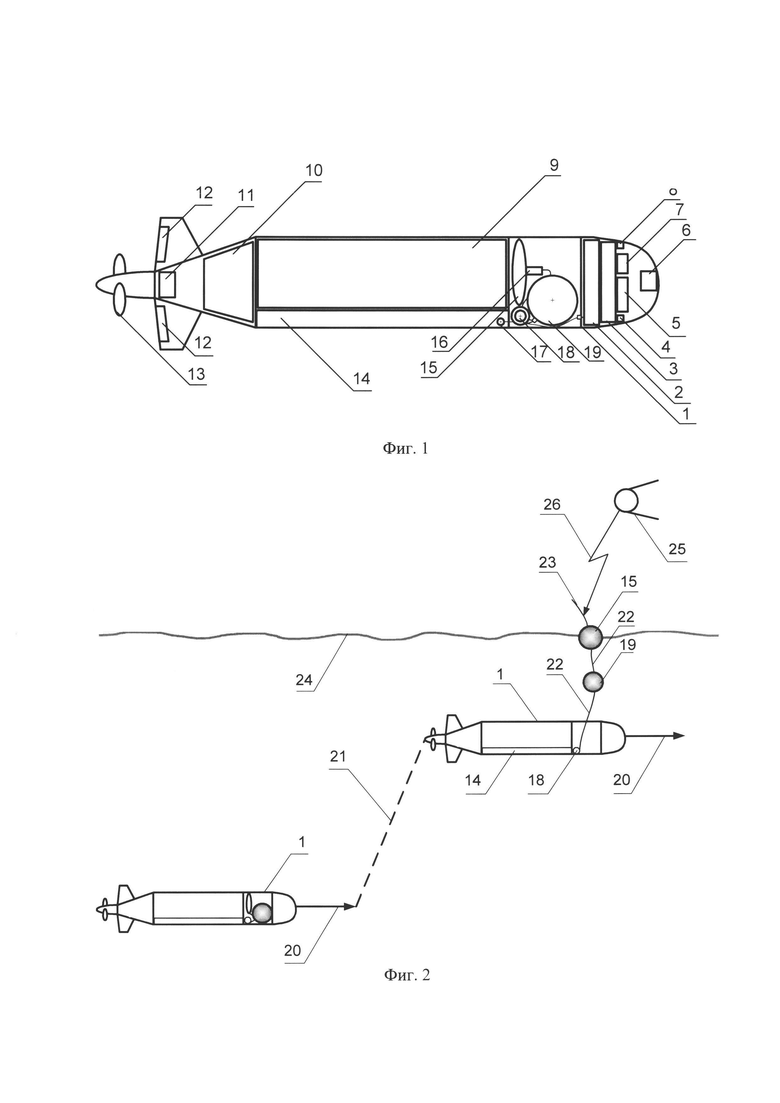
На фиг. 1 изображен акустический рефлектор мобильный (АРМ) и его устройство, где: 1 - акустический рефлектор мобильный, 2 - бортовая навигационная система, 3 - бортовая система управления, 4 - датчик гидростатического давления, 5 - источник тока, 6 - вычислительное устройство, 7 - гидролокатор, 8 - датчик гидродинамического давления, 9 - энергосиловая установка с источником энергии, 10 - двигатель, 11 - приводы рулевых машинок, 12 - рули, 13 - движитель, 14 - балластный отсек, 15 - надувной буй с приемной антенной спутниковой навигационной системы, 16 - газогенератор, 17 - пиротехнический клапан, 18 - катушка с приводом, 19 - акустический рефлектор.
Бортовая навигационная система АРМ (2) обеспечивает его движение по заданному маршруту с заданной точностью, бортовая система управления (3) осуществляет управление работой всех приборов и механизмов АРМ, датчик гидростатического давления (4) служит для определения глубины места, а датчик гидродинамического давления (8) - для оценки скорости движения. Гидролокатор (7) предназначен для ориентации в водном пространстве и обнаружения препятствий при движении АРМ по маршруту, а также выявления объектов, заданных в маршрутном задании в качестве ориентиров. Источник тока (5) обеспечивает аппаратуру управления необходимой энергией. Балластный отсек (14) необходим для установки АРМ в назначенном месте на якорь, для чего после срабатывания пиротехнического клапана (17) он заполняется водой, и АРМ погружается на дно. Надувной буй (15) служит для всплытия на поверхность и получения уточненных координат АРМ от спутниковой навигационной системы в назначенной точке, а после принятия водного балласта и постановки АРМ на якорь - для удержания акустического рефлектора (19) на заданном углублении. Для надува буя (15) газом используется газогенератор (16). Катушка с приводом (18) предназначена для разматывания кабель-троса (22) на заданную длину и всплытия надувного буя (15) на поверхность для связи со спутником, а также для удержания акустического рефлектора (19) на заданном углублении после постановки АРМ на якорь.
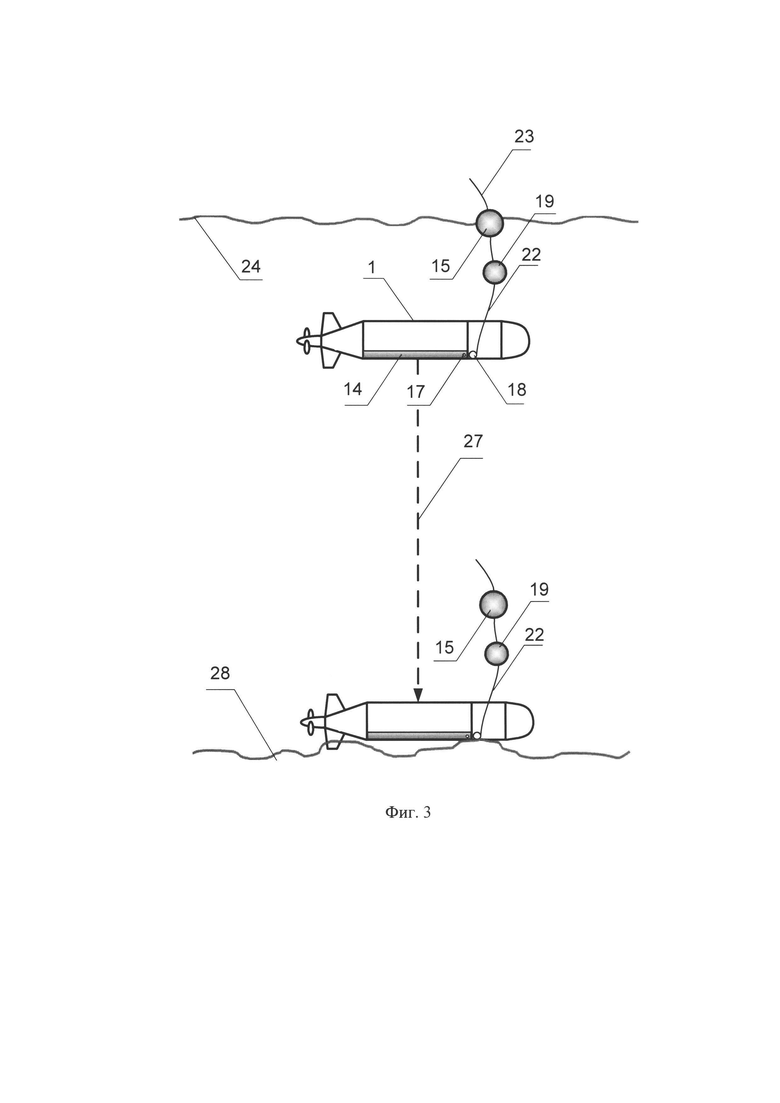
На фиг. 2 и 3 проиллюстрирована работа АРМ после прибытия в назначенную точку.
На фиг. 2 показано, как АРМ (1), имея текущий курс и скорость (20), прибывает в назначенную точку и всплывает (21) на заданную глубину, после чего надувает газом надувной буй (15) и поднимает его на поверхность воды (24). С помощью антенны (23) спутниковой навигационной системы, находящейся на надувном буе (15), АРМ принимает (26) от космического аппарата (25) свои текущие географические координаты и уточняет в бортовой навигационной системе свой путь в точку погружения.
На фиг. 3 изображен момент, когда в расчетной точке по команде бортовой системы управления (3) срабатывает пиротехнический клапан (17), балластный отсек (14) заполняется водой и АРМ (1) погружается (27) на дно (28). В результате акустический рефлектор (19) устанавливается в заданной точке, на заданной глубине и готов к работе.
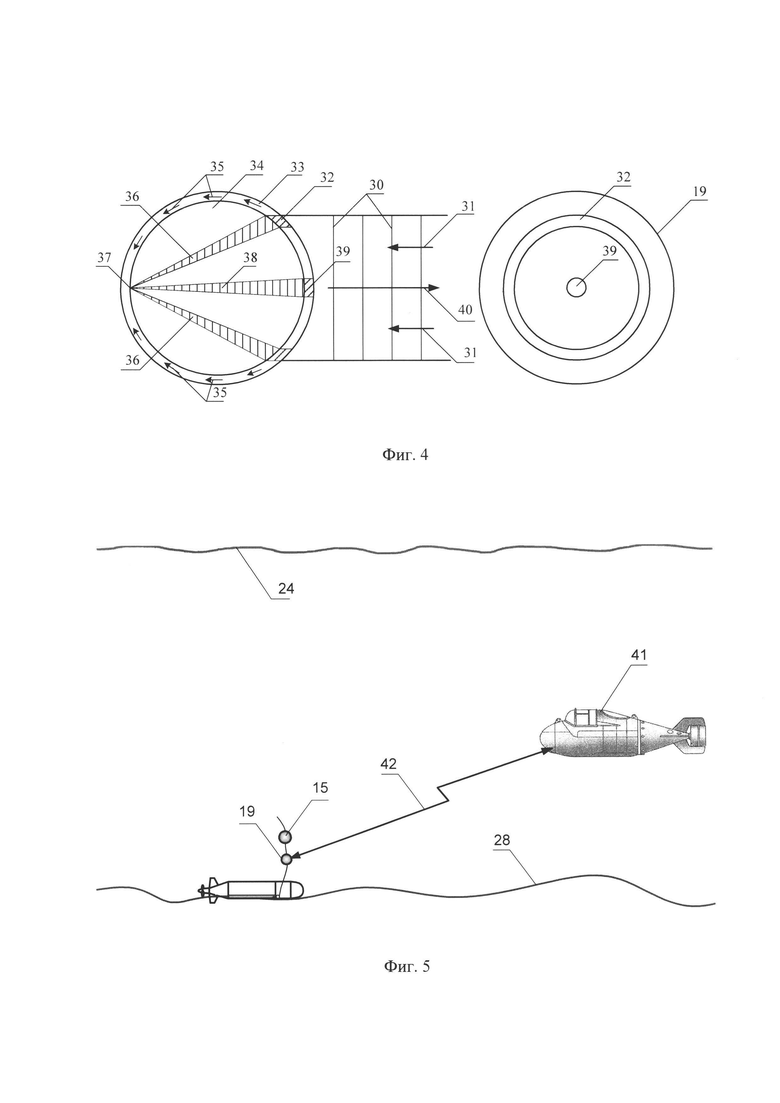
Устройство и принцип действия типового акустического рефлектора [3] приводится на фиг. 4. Здесь цифрами обозначены: 19 - акустический рефлектор, 30 - фронт акустических волн, направляемых источником к рефлектору и отражаемых им обратно, 31 - направление луча акустической волны от источника к рефлектору, 32 - отверстие периферийного акустического окна, 33 - сердечник рефлектора, 34 - оболочка акустического рефлектора, 35 - путь акустической волны, входящей в акустический рефлектор и движущейся в его оболочке (поперечная волна), 36 - путь акустической волны, входящей в акустический рефлектор через периферийное акустическое окно и движущейся в сердечнике (упругая волна), 37 - фокальная точка (фокус), 38 - путь акустической волны, входящей в акустический рефлектор через центральное акустическое окно и движущейся в сердечнике после ее входа (упругая волна), а также путь более мощной встречной акустической волны, направленной к источнику и возникающей в результате сложения находящихся в одной фазе отраженных от фокальной точки встречных упругих волн сердечника (36) и поперечных акустических волн оболочки акустического рефлектора (35), 39 - центральное акустическое окно, 40 - направление луча усиленной акустическим рефлектором отраженной акустической волны к ее источнику.
На фиг. 5 показано действие АРМ в качестве навигационного ориентира, когда подводный объект (41) входит в зону действия акустического рефлектора (19), производит акустическую посылку в его сторону (42) и получает ответный сигнал, позволяющий подводному объекту уточнить свое местоположение.
Техническим результатом изобретения является акустический рефлектор мобильный, который способен самостоятельно следовать в подводном положении в назначенный район в точку с требуемыми координатами или к заданному неподвижному подводному объекту, становиться там на якорь и использоваться в дальнейшем своими плавсредствами в качестве долговременного и незаметного для посторонних навигационного ориентира.
Источники информации, использованные при разработке изобретения:
1. Военно-морской словарь / Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989. - 511 с. С. 265.
2. Акустические рефлекторы. Патент на изобретение RU 2562919/ САБСИ АССЕТ ЛОКЕЙШН ТЕКНОЛОДЖИС ЛИМИТЕД (GB). М.: ФИПС, 2015. Бюл. № 25.
3. Акустические рефлекторы. Патент на изобретение RU 2566388/ САБСИ АССЕТ ЛОКЕЙШН ТЕКНОЛОДЖИС ЛИМИТЕД (GB). М.: ФИПС, 2015. Бюл. № 30.
4. Настраиваемый акустический рефлектор. Патент на изобретение RU 2495501 / Государственный Секретарь По Обороне (GB). М.: ФИПС, 2013. Бюл. № 28.
5. Патент на изобретение RU 2709058. Мобильный гидроакустический буй-маяк и способ навигационного оборудования морского района / А.В. Иванов, А.В. Новиков. М.: ФИПС, 2019. Бюл. № 35].
6. Патент на изобретение RU 2710831. Самоходный гидроакустический буй-маяк и способ навигационного оборудования морского района / А.В. Иванов, А.В. Новиков. М: ФИПС, 2020. Бюл. № 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛИРУЕМЫЙ МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК | 2021 |
|
RU2766365C1 |
| МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2709058C2 |
| СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА И КОНТРОЛЯ В НЕМ АКУСТИЧЕСКИХ ОБЪЕКТОВ | 2023 |
|
RU2806775C1 |
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА И САМОХОДНЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2710791C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| СИСТЕМА ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2659314C2 |
| СПОСОБ ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2668494C2 |
| МОБИЛЬНАЯ СИСТЕМА ОХРАНЫ МОРСКОГО РАЙОНА | 2023 |
|
RU2819811C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
Изобретение относится к области морской техники и предназначено для навигационного оборудования морских районов и обеспечения безопасности кораблевождения и определения координат в море надводных кораблей, судов, подводных объектов. Акустический рефлектор мобильный представляет собой автономный необитаемый подводный аппарат. Содержит бортовую систему управления и навигационную систему, гидролокатор, источник тока, энергосиловую установку с источником энергии и двигателем, движитель, приводы рулевых машинок и наружное оперение с рулями, антенну и приемник спутниковой системы навигации типа ГЛОНАСС, связанные с бортовой системой управления, вычислительное устройство и датчики гидростатического и гидродинамического давления. Подводный аппарат имеет отсек, в котором размещается акустический рефлектор и устройства его приведения в рабочее положение, включающие надувной буй, газогенератор, катушку с кабель-тросом и приводом, а также балластный отсек с пиротехническим клапаном. Повышается безопасность кораблевождения. 5 ил.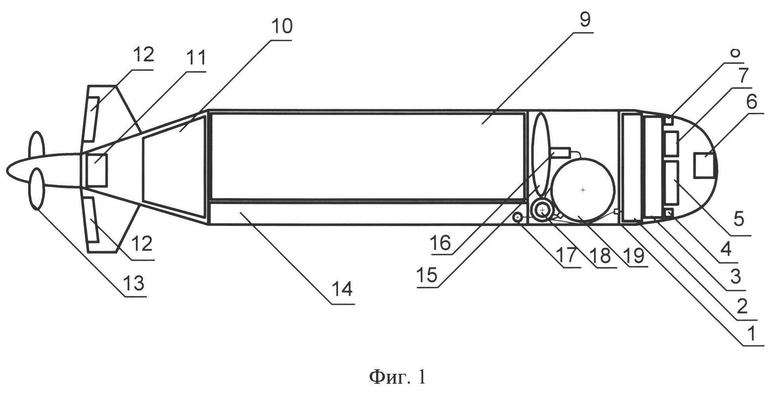
Акустический рефлектор мобильный, представляющий собой автономный необитаемый подводный аппарат, имеющий бортовую систему управления и навигационную систему, гидролокатор, источник тока, энергосиловую установку с источником энергии и двигателем, движитель, приводы рулевых машинок и наружное оперение с рулями, антенну и приемник спутниковой системы навигации типа ГЛОНАСС, связанные с бортовой системой управления, вычислительное устройство и датчики гидростатического и гидродинамического давления, отличающийся тем, что подводный аппарат имеет отсек, в котором размещается акустический рефлектор и устройства его приведения в рабочее положение, включающие надувной буй, газогенератор, катушку с кабель-тросом и приводом, а также балластный отсек с пиротехническим клапаном.
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА | 2012 |
|
RU2501038C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 2014 |
|
RU2561012C1 |
| Многофункциональный комплекс для выполнения подводно-технических работ | 2017 |
|
RU2653527C1 |
| Привод к независимым рейкам секций топливного насоса | 1959 |
|
SU130292A1 |
| US 20150344109 A1, 03.12.2015 | |||
| CN 104875867 A, 02.09.2015. | |||

