Изобретение относится к радиолокации и может быть использовано в радиолокационных станциях (РЛС) различных типов для определения собственной скорости носителя РЛС относительно подстилающей поверхности, а также измерения радиальной скорости объектов наблюдения.
Известен способ радиолокационного (РЛ) определения скорости объектов наблюдения относительно носителя РЛС путем измерения доплеровского сдвига частоты РЛ сигналов, отраженных от объекта. Способ применяют для измерения собственной скорости летательного аппарата (ЛА) относительно подстилающей поверхности [1, с.294-297], а также для определения радиальной скорости объектов наблюдения в РЛС различных типов, например бортовых многофункциональных РЛС [2, с.69-106].
Данный способ основан на излучении когерентной РЛС зондирующих РЛ сигналов в направлении объекта, которым может быть участок подстилающей поверхности или любой другой объект, приеме отраженных от объекта РЛ сигналов и измерении доплеровского сдвига частоты FD=2Vr/λ, где λ - длина волны зондирующих сигналов, Vr - радиальная составляющая относительной скорости объекта.
В доплеровских измерителях собственной скорости (ДИС) обычно применяют три или четыре луча с некомпланарными продольными осями. По каждому лучу измеряют свое значение Vr=FDλ/2 с использованием данных бортовой навигационной системы находят полный вектор скорости ЛА.
В современных цифровых РЛС измерение доплеровского сдвига производится с помощью быстрого преобразования Фурье (БПФ). При этом точность измерения частоты примерно равна ширине фильтра БПФ - ΔFD. Точность измерения скорости ΔVr определяется точностью измерения доплеровского сдвига частоты ΔFD
ΔVr=ΔFDλ/2.
В свою очередь ширина фильтра БПФ обратно пропорциональна времени накопления Тн массива РЛ сигналов, необходимого для выполнения каждой операции БПФ (ΔFD=1/Tн).
Таким образом, точность измерения скорости пропорциональна времени накопления сигналов, но ограничивается различными флуктуационными погрешностями отраженных РЛ сигналов, которые определяются характеристиками самой РЛС, а также свойствами облучаемого объекта - его диаграммой обратного рассеяния.
Наиболее близким способом-прототипом является корреляционный способ измерения собственной скорости ЛА относительно подстилающей поверхности. В корреляционном измерителе скорости (КИС) использует пространственно-временной способ обработки РЛ сигналов, принимаемых одновременно тремя-четырьмя разнесенными вдоль базовой линии антеннами с широкими диаграммами направленности, оси которых ориентированы в окрестности нормали [1, с.297-299]. При этом базовую линию ориентируют по вектору скорости ЛА. В КИС собственную скорость ЛА определяют путем поиска максимума корреляционной функции сигналов, принимаемых парами разнесенных антенн.
Экспериментально доказано [3], что корреляционный способ может иметь более высокую точность, чем доплеровский способ измерения скорости. Однако его применение ограничено техническими сложностями, связанными с необходимостью использования системы ориентации базовой линии по вектору скорости ЛА. Кроме того, для этого способа требуется собственная антенная система, поэтому его сложно реализовать в многофункциональных РЛС в качестве одного из режимов работы.
Задачей изобретения является разработка способа радиолокационного измерения радиальной скорости, совмещающего свойства доплеровского и корреляционного измерителей скорости, имеющего более высокую точность измерения, чем у доплеровского способа, и возможность реализации в составе многофункциональных РЛС в качестве одного из режимов работы.
Сущность изобретения заключается в том, что для измерения радиальной скорости объекта Vr в направлении объекта через передающую антенну РЛС излучают первую и вторую последовательности по N радиоимпульсов, имеющих длительность τ, одинаковые и постоянные начальные фазы, период следования Тр. В каждой последовательности частоту заполнения радиоимпульсов дискретно изменяют по линейному закону от импульса к импульсу с шагом Δf=1/τ, но с разными знаками так, что радиоимпульсы одной из последовательностей (либо первой, либо второй) имеют возрастающую частоту заполнения fa(n)=fo+Δf(n-(N-1)/2), а радиоимпульсы другой последовательности имеют убывающую частоту заполнения fb(n)=fo-Δf(n-(N-1)/2), где n - номера импульсов последовательностей (n=0, 1, 2, …, N-1), fo - средняя частота заполнения радиоимпульсов fo=(f(0)+f(N-1))/2.
При этом начало второй последовательности задерживают относительно начала первой последовательности на время Tc=NTp (излучают вторую последовательность после окончания первой) или Tc=Тр/2 (каждый n-й импульс второй последовательности излучают после n-го импульса первой).
После излучения каждого радиоимпульса через приемную антенну РЛС в выбранном временном интервале принимают отраженные от облучаемого объекта радиолокационные сигналы. Причем начало этого интервала задерживают относительно начала излученного импульса на время t0>τ, а конец интервала задерживают на время t1<Тр, если задают Tc=NTp или t1<Тр/2, если задают Тс=Тр/2. При этом величину t0 выбирают одинаковой для всех импульсов обеих последовательностей.
Принятые сигналы с высокой частоты заполнения импульсов fa(n) и fb(n) переносят на нулевую частоту с одновременным преобразованием в комплексную форму и оцифровывают полученные сигналы с временным дискретом Δt, который не превышает длительности радиоимпульса τ. Полученные цифровые отсчеты записывают в двумерные массивы комплексных отсчетов входных сигналов sa(m,n) для последовательности с возрастающей частотой заполнения импульсов fa(n) и sb(m,n) для последовательности с убывающей частотой заполнения импульсов fb(n), где m - номера отсчетов (m=0, 1, 2, …, М-1). Число таких отсчетов выбирают из условия М=(t1-t0)/Δt, а первые отсчеты (m=0) соответствуют моментам времени t0.
Затем с использованием полученных массивов sa(m,n) и sb(m,n) определяют значение радиальной скорости Vr путем выбора этого значения скорости Vr из интервала Vmin÷Vmax возможных значений искомой скорости Vr по экстремуму модуля корреляционной функции
 ,
,
где Fb ∗(m,k) - массив комплексно сопряженный массиву Fb(m,k),
при этом Fa(m,k)=Ф{ua(m,n)} и Fb(m,k)=Ф{ub(m,n)}, где k=0,1,2,...,N-1; Ф{} - дискретное преобразование Фурье, ua(m,n)=sa(m,n)eiφ(n) и ub(m, n)=sb(m,N-n-1)eiφ(N-n-1), причем значения фазовых коэффициентов φ(n) вычисляют для каждого выбранного значения скорости V по формуле φ(n)=-4πТр(V/c)(n+1/2)(fo+Δf(n-(N-1)/2)), где c - скорость распространения радиоволн в пространстве.
Техническим результатом предложенного способа радиолокационного измерения радиальной скорости объекта является повышение точности ее измерения по сравнению со способом измерения радиальной скорости на основе доплеровской фильтрации при равных значениях времени накопления РЛ сигналов, отраженных от объекта наблюдения, за счет использования широкополосных зондирующих сигналов и корреляционной обработки получаемых дальностных профилей объектов.
Используемые в предлагаемом способе зондирующие РЛ сигналы относятся к широкополосным сигналам типа дискретных частотных последовательностей (ДЧП) и описаны в [4, с.289-307]. Сигналы типа ДЧП представляют собой последовательности (пачки) по N радиоимпульсов длительностью τ. Каждый n-й импульс ДЧП (n=0, 1, 2 …, N-1) имеет собственную частоту заполнения, выбираемую из частотного ряда, имеющего шаг Δf=1/τ, и среднее значение частоты fo. В общем случае порядок перебора частот в ДЧП от импульсу к импульсу может быть любым, но этот порядок необходимо учитывать при обработке принятых РЛ сигналов. При этом прием отраженных от объекта наблюдения РЛ сигналов осуществляется в промежутках между излучаемыми радиоимпульсами ДЧП.
Период следования радиоимпульсов Тр выбирается исходя из необходимой однозначной дальности РЛ наблюдения. Полная длительность одной ДЧП Тдчп=NTp.
Отдельный импульс ДЧП позволяет получить разрешение по дальности ΔR=с τ/2. Специальная обработка всей ДЧП (сжатие по дальности) с помощью согласованного фильтра [4] обеспечивает разрешение по дальности Δr=сτ/(2N).
Высокое разрешение позволяет получать дальностные профили (ДП) протяженных объектов, которыми является участки подстилающей поверхности, попадающие в раскрыв антенного луча, и другие объекты. ДП представляет собой последовательность значений амплитуд и фаз сигналов, отраженных от элементов объекта, отстоящих друг от друга на расстояние Δr вдоль линии наклонной дальности.
Сигналы типа ДЧП и алгоритмы их обработки имеют свойство, которое заключается в том, что если объект наблюдения на временном интервале Тдчп перемещается вдоль линии дальности относительно ЛА с постоянной скоростью Vr, а закон изменения частоты заполнения импульсов ДЧП линейный, то происходит смещение объекта наблюдения по дальности в выходном ДП относительно истинной дальности. Это свойство является следствием доплеровского смещения частоты РЛ сигналов.
Направление этого смещения определяется как знаком радиальной скорости объекта, так и знаком линейной перестройки частоты импульсов в ДЧП. Поэтому, если объект имеет некоторую скорость Vr того или иного знака, то в выходном ДП для ДЧП с возрастающей частотой заполнения от импульса к импульсу изображение объекта сместится по дальности в одну сторону, а для ДЧП с убывающей частотой заполнения в противоположенную. При этом смещение изображения объекта относительно его истинного положения на линии дальности, которое было бы при отсутствии движения, пропорционально величине Vr.
Если значение скорости Vr измеряют каким-либо иным способом, например, с помощью навигационной системы, то это смещение объекта по дальности в ДП может быть скомпенсировано в процессе обработки путем фазовой коррекции принимаемых РЛ сигналов. Указанное свойство РЛ сигналов типа ДЧП заложено в основу нового радиолокационного способа измерения радиальной скорости объектов наблюдения.
В предлагаемом способе зондирующий сигнал представляет собой две практически одновременно излучаемые ДЧП, в которых частоту заполнения радиоимпульсов линейно изменяют от импульса к импульсу, с постоянным дискретом Δf=1/τ, но с разными знаками. При этом радиоимпульсы одной последовательности имеют возрастающую частоту заполнения (прямая ДЧП), равную fa(n)=fo+Δf(n-(N-1)/2), где n=0, 1, 2, … N-1, fo - средняя частота заполнения радиоимпульсов fo=(f(0)+f(N-1))/2.
Радиоимпульсы другой последовательности имеют убывающую частоту заполнения (обратная ДЧП), равную fb(n)=fo-Δf(n-(N-1)/2). Причем для измерения скорости достаточно излучения и обработки одной пары ДЧП - прямой и обратной. Относительный порядок следования прямой и обратной ДЧП в паре не имеет значения.
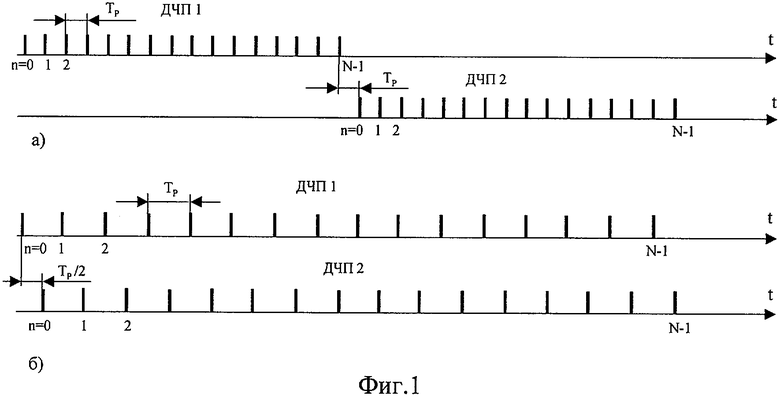
В способе можно использовать два варианта излучения пар ДЧП (см. фиг.1). В первом варианте вторую ДЧП излучают сразу после окончания первой через время, равное Тр (пара последовательных ДЧП). Во втором варианте каждый n-й импульс второй ДЧП излучают после n-го импульса первой ДЧП через время, равное Тр/2 (пара вложенных ДЧП). Знак линейной частотной модуляции первой ДЧП может быть любым, а знак второй ДЧП должен быть противоположен знаку первой. Точность измерения скорости в обоих вариантах излучения ДЧП при равных значениях Тр одинакова, но в первом варианте (последовательные ДЧП) общее время, необходимое для измерения скорости, в два раза больше, чем во втором варианте.
После излучения каждого зондирующего радиоимпульса с помощью приемной антенны РЛС принимают отраженные от облучаемого объекта РЛ сигналы. В обеих ДЧП временной интервал приема РЛ сигналов имеет фиксированное и одинаковое положение относительно зондирующих импульсов. Начало интервала приема РЛ сигналов задерживают относительно начала излученного импульса на время t0>τ, а конец на время t1<Тр, если используют последовательные ДЧП (Tc=NTp) и t1<Тр/2, если используют вложенные ДЧП (Тс=Тр/2). Причем значения t0 и t1 должны быть постоянны для всех импульсов в паре ДЧП. Длительность интервала приема определяет длину ДП, в пределах которого располагается объект или его часть.
При этом если предлагаемый способ используют для измерения собственной скорости ЛА и объектом наблюдения является участок подстилающей поверхности, то для повышения точности измерения скорости выбирают по возможности большую длительность интервала приема. В тоже время для экономии вычислительных операций нецелесообразно, чтобы получаемый ДП, соответствующий интервалу приема, выходил за пределы антенного пятна на подстилающей поверхности. При наблюдении и измерении скорости воздушных объектов значения t0 и tи выбирают таким образом, чтобы на интервале приема находился только тот объект, скорость которого измеряют.
Принимаемые РЛ сигналы переносят с высокой частоты заполнения импульсов fa(n) и fb(n) на нулевую частоту с одновременным преобразованием в комплексную форму. Далее полученные сигналы преобразуют из аналоговой формы в цифровую помощью двухканального аналого-цифрового преобразователя (АЦП), имеющего время преобразования (такт) Δt, значение которого выбирают не более длительности радиоимпульса τ. Для каждого интервала приема получают М комплексных отсчетов сигнала с номерами m=0, 1, 2, …, М-1, где М=(t1-t0)/Δt. Причем первые отсчеты (m=0) соответствуют моментам времени t0.
Полученные цифровые отсчеты запоминают в виде двумерных массивов отдельно для каждой ДЧП. При этом РЛ сигналы для ДЧП, в которой частота заполнения радиоимпульсов возрастает от импульса к импульсу (fa(n)) запоминают в массиве sa(m,n). РЛ сигналы другой ДЧП из пары, в которой частота заполнения убывает от импульса к импульсу (fb(n)), записывают в массиве sb(m,n).
После записи всех отсчетов РЛ сигналов (для n=0, 1, 2, …, N-1 и m=0, 1, 2, …, М-1) в массивах sa(m,n) и sb(m,n) для одной пары ДЧП определяют значение радиальной скорости Vr.
В соответствии с описанным выше свойством сигналов ДЧП истинным значением скорости будет такое, при котором после проведения фазовой коррекции входных РЛ сигналов выходные сигналы в ДП для прямой и обратной ДЧП будут идентичны с точностью до шумов. Различие начальных случайных фаз отраженных от объекта РЛ сигналов для прямой и обратной ДЧП не имеет значения для работы способа.
Для определения искомой скорости Vr на заранее известном интервале Vmin÷Vmax всех возможных значений скорости Vr находят такое значение скорости V, для которого модуль корреляционной функции будет иметь свой экстремум (Fb ∗(m,k) - массив комплексно сопряженный массиву Fb(m,k)).
Это значение скорости V принимают за истинное значение скорости Vr (наиболее близкое к нему). Экстремум функции C(V) на интервале Vmin÷Vmax единственен.
Для расчета значения функции C(V) для каждого значения V при поиске ее экстремума используют выходные массивы комплексных отсчетов сигналов Fa(m,k) и Fb(m,k). Причем выходные массивы Fa(m,k) и Fb(m,k) для каждого значения V получают с помощью дискретного преобразования Фурье отсчетов сигналов, записанных в строках промежуточных массивов ua(m,n) и ub(m,n):

 где k=0, 1, …, N-1.
где k=0, 1, …, N-1.
При этом необходимые для получения выходных массивов промежуточные массивы ua(m,n) и ub(m,n) предварительно получают путем фазовой коррекции входных массивов сигналов с помощью выражений ua(m,n)=sa(m,n)eiφ(n) и ub(m,n)=sb(m,N-n-1)eiφ(N-n-1).
Используемые в приведенных выражениях фазовые коэффициенты φ(n) вычисляют для выбранного значения скорости V по формуле
φ(n)=-4πTp(V/с)(n+1/2)(fo+Δf(n-(N-1)/2)), где с - скорость распространения радиоволн в пространстве.
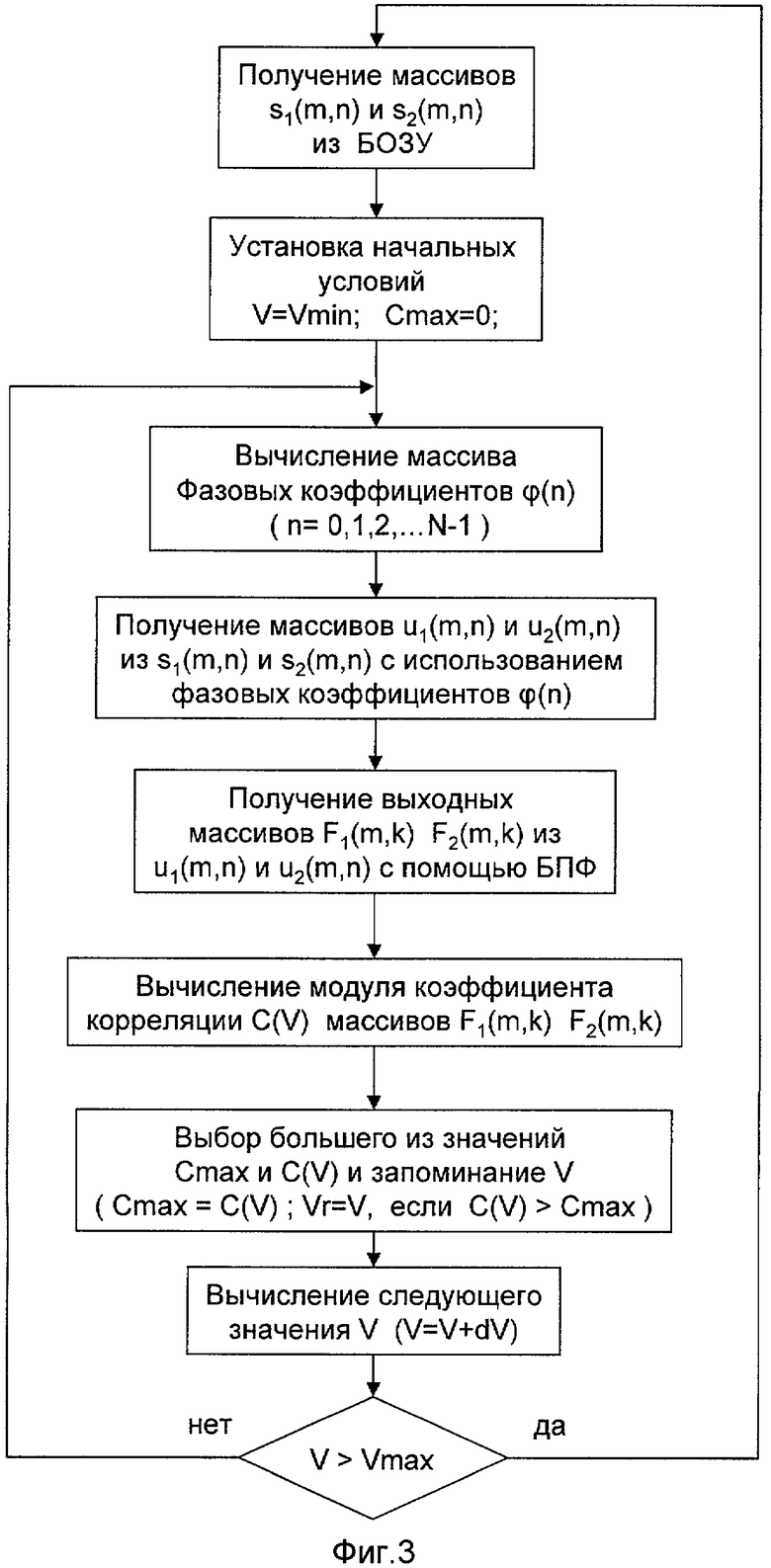
Поиск экстремума выполняют пошагово с использованием какого-либо алгоритма поиска экстремума функции (последовательный перебор, метод последовательных приближений и т.п.). При этом необходимо учитывать, что метод поиска экстремума оказывает влияние на точность определения скорости.
Используемые в процессе обработки выходные массивы Fa(m,k) и Fb(m,k) содержат по М частных ДП по N отсчетов дальности в каждом. Для всех отсчетов АЦП строятся свои частные ДП, которые могут частично перекрываться по дальности, если такт преобразования Δt<τ.
Точность рассматриваемого способа измерения скорости пропорциональна длительности ДЧП, используемой для облучения объекта, то есть величине NTп, что аналогично времени накопления в ДИС. В тоже время в способе используют корреляционную обработку массивов выходных сигналов Fa(m,k) и Fb(m,k), представляющих собой дальностные профили объектов высокого разрешения, что повышает точность определения скорости.
При измерении собственной скорости ЛА объектами наблюдения являются участки подстилающей поверхности, которые имеют большую протяженность (сотни и тысячи метров). Их ДП состоят из большого числа элементов (сотни и тысячи при разрешении по дальности порядка одного метра), что способствует повышению точности измерения скорости.
Рассматриваемый способ измерения радиальной скорости объекта может быть использован в многофункциональной РЛС с цифровой обработкой сигналов.
На фиг.1 показаны временные диаграммы одной пары зондирующих сигналов типа ДЧП (а - последовательные ДЧП, б - вложенные ДЧП). На фиг.2 представлена функциональная схема РЛС, реализующая предлагаемый способ. На фиг.3 представлен алгоритм обработки РЛ сигналов в процессоре сигналов РЛС.
На схеме фиг.2 показаны приемопередатчик 1 РЛС (ППРЛС), синтезатор 1 частоты (СЧ), два АЦП (соответственно 3 и 4), буферное оперативное запоминающее устройство 5 (БОЗУ) и процессор 6 радиолокационных сигналов (ПРЛС).
ППРЛС 1 первым выходом соединен с первым входом СЧ 2, а вторым и третьим выходами подключен ко входам АЦП 3 и АЦП 4 соответственно, которые своими группами выходов соединены соответственно с первой и второй группой входов БОЗУ 5, группой выходов подключенного к группе входов ПРЛС 6, группой выходов соединенного с группой выходов РЛС, первым и вторым выходами подключенного соответственно к первому входу ППРЛС 1 и ко второму входу СЧ 2, при этом третий выход ППРЛС 6 соединен с управляющим входом БОЗУ 5.
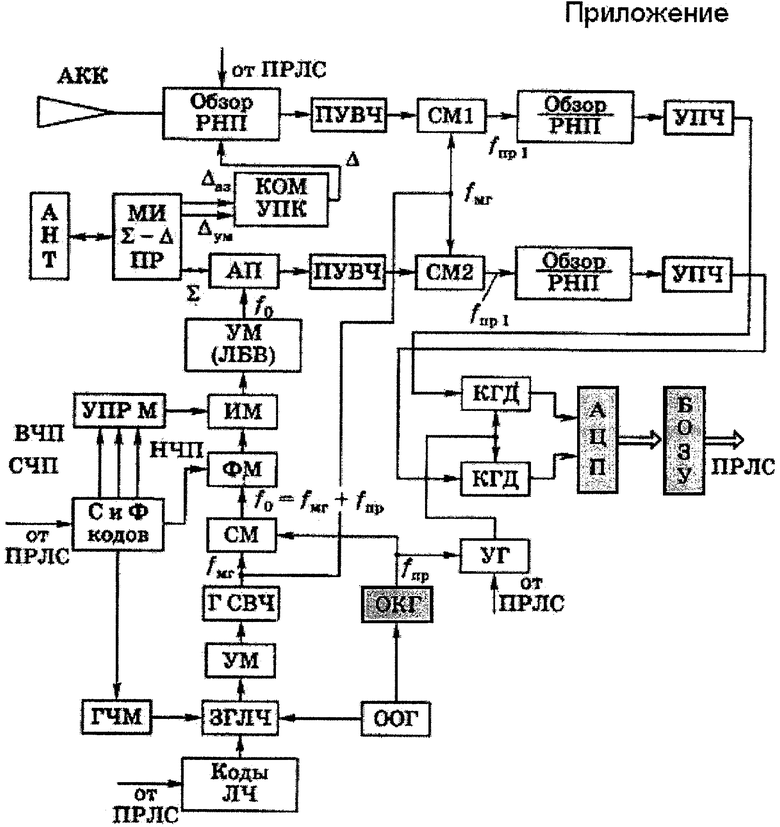
ППРЛС осуществляет формирование и излучение зондирующих РЛ сигналов в направлении объекта наблюдения, прием отраженных от объекта РЛ сигналов и их аналоговую обработку и может быть выполнено в виде соответствующего устройства (см., например, [2, стр.238 (рис.10.2)]), структурная схема которого приведена в приложении.
СЧ предназначен для генерирования сигналов на заданной промежуточной частоте, необходимых для формирования и обработки РЛ сигналов типа ДЧП. СЧ используют в ППРЛС вместо опорного кварцевого генератора (ОКГ на схеме в приложении выделен темным фоном), формирующего сигнал промежуточной частоты (fпр) постоянной величины. СЧ формирует N частот с дискретом перестройки Δf и средней частотой fпр, при этом выбор необходимой частоты производится по управляющим кодам, поступающим от внешних устройств.
Для построения СЧ может быть использован любой из существующих в настоящее время цифровых синтезаторов частоты в интегральном исполнении, например ADF4117, ADF4360-5 и др. (см., например, www.analog.com).
Два АЦП осуществляют преобразование квадратур РЛ сигналов на нулевой частоте с выхода ППРЛС в цифровой вид. БОЗУ предназначен для записи цифровых отсчетов сигналов с выходов АЦП в массивы sa(m,n) и sb(m,n), которые затем используют для определения радиальной скорости объекта. Узлы АЦП и БОЗУ на фиг.2 заменяют собой аналогичные узлы на схеме ППРЛС из приложения (отмечены темным фоном). ПРЛС вычисляет значение радиальной скорости объекта с помощью алгоритма, приведенного на фиг.3.
При технической реализации способа для осуществления функций АЦП, БОЗУ и ПРЛС может быть использован модуль цифровой обработки сигналов ADP201V5 с субмодулем аналогового ввода ADMDDC2WB-L производства ЗАО «Инструментальные системы».
Два АЦП, установленных в субмодуле ADMDDC2WB-L, имеют максимальную тактовую частоту 70 МГц. БОЗУ и ПРЛС реализованы в модуле ADP201V5, имеющем большой объем оперативной памяти и высокую производительность. (В состав модуля входят 5 процессоров TigerSHARC ADSP-TS201S с суммарной пиковой производительностью 15 Gflops и две ПЛИС Virtex4 фирмы Xilinx.)
Система, изображенная на фиг.2, работает следующим образом. Для каждого измерения значения радиальной скорости ППРЛС формирует и излучает в направлении объекта две ДЧП - одна с возрастающей частотой заполнения радиоимпульсов, другая с убывающей (взаимный порядок их следования может быть любым). При этом вторая ДЧП (ДЧП 2) может излучаться после окончания первой (ДЧП 1) или накладываться на первую (эпюры фиг.1а и фиг.1б соответственно).
Для получения ДЧП 1 и ДЧП 2 используют СЧ, который формирует опорные сигналы с частотами, выбираемыми из сетки fпр(n)=fпр+Δf(n-(N-1)/2). Выбор необходимой частоты осуществляют по управляющим командам, поступающим в СЧ от ПРЛС. Таким образом формируют ДЧП с заданным дискретом и знаком линейной частотной модуляции, а также порядком следования (последовательные ДЧП или вложенные ДЧП).
Отраженные от объекта РЛ сигналы с помощью ППРЛС принимают, усиливают и переносят на нулевую частоту с одновременным преобразованием в комплексную форму. При этом в ППРЛС (см. приложение) используют только суммарный приемный канал антенны (Σ) и соответствующий приемный тракт. Перенос РЛ сигналов на нулевую частоту производят с помощью когерентных детекторов (КГД, см. приложение), используя при этом в качестве опорных выходные сигналы СЧ с частотой fпр(n).
Квадратуры РЛ сигналов на нулевой частоте с выходов ППРЛС подают на входы двух АЦП. Цифровые отсчеты РЛ сигналов с выходов АЦП поступают на входы БОЗУ. В БОЗУ производится запись массивов оцифрованных РЛ сигналов.
После излучения пары ДЧП по команде, поступающей от ПРЛС в БОЗУ, запись цифровых отсчетов РЛ сигналов прекращают. После этого начинают передачу сформированного в БОЗУ сигнального массива в ПРЛС.
Сформированный в БОЗУ массив сигналов содержит в себе массивы sa(m,n) и sb(m,n), которые далее используют для определения скорости объекта в ПРЛС по алгоритму, представленному на фиг.3. Одновременно с передачей и обработкой данного массива сигналов в ПРЛС или с некоторой задержкой начинают новый цикл работы, включающей излучение и прием РЛ сигналов для новой пары ДЧП и формирование в БОЗУ нового массива сигналов для определения следующего отсчета скорости.
Источники информации
1. Радиосистемы управления / Под ред. В.А.Вейцеля. М.: Дрофа, 2005 (аналог).
2. Многофункциональные радиолокационные системы / Под ред. Б.Г.Татарского. М.: Дрофа, 2005.
3. Боркус М.К., Черный А.Е. Корреляционные измерители путевой скорости и угла сноса летательных аппаратов. - М.: Сов. радио, 1973.
4. Кук Ч., Бернфельд М. Радиолокационные сигналы (теория и применение). М.: Сов. радио, 1971.
Изобретение относится к радиолокации и может быть использовано в радиолокационных станциях (РЛС) различных типов для определения собственной скорости носителя РЛС относительно подстилающей поверхности, а также измерения радиальной скорости объектов наблюдения. Техническим результатом изобретения является повышение точности измерения скорости по сравнению со способом измерения радиальной скорости на основе доплеровской фильтрации при равных значениях времени накопления РЛ сигналов, отраженных от объекта наблюдения, за счет использования широкополосных зондирующих сигналов и корреляционной обработки получаемых дальностных профилей объектов. Предложенный способ также обеспечивает возможность его реализации в составе многофункциональной РЛС в качестве одного из режимов работы. 3 ил.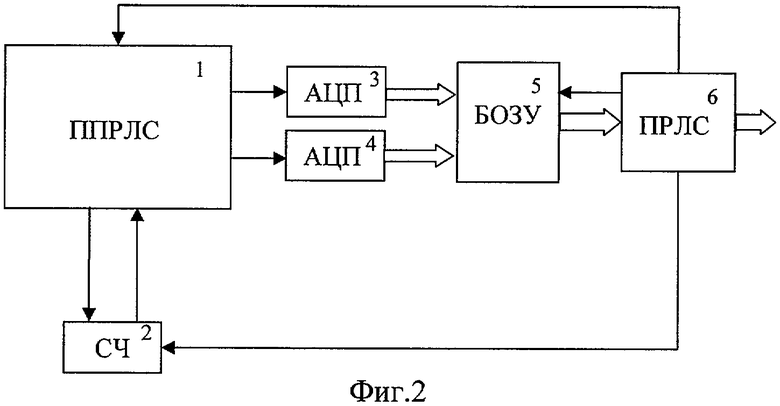
Способ радиолокационного измерения радиальной скорости объекта, включающий излучение через передающую антенну радиолокационной станции (РЛС) в направлении облучаемого объекта первой и второй последовательностей зондирующих радиоимпульсов, причем каждая из последовательностей содержит по N радиоимпульсов, имеющих длительность τ, одинаковые и постоянные начальные фазы, период следования Тр, дискретно изменяющуюся от импульса к импульсу частоту заполнения радиоимпульсов с шагом Δr=1/τ по линейному закону, но с разными знаками так, что радиоимпульсы одной из последовательностей (либо первой, либо второй) имеют возрастающую частоту заполнения fa(n)=fo+Δf(n-(N-1)/2), а радиоимпульсы другой последовательности имеют убывающую частоту заполнения fb(n)=fo-Δf(n-(N-1)/2), где n - номера импульсов последовательностей (n=0, 1, 2, …, N-1); fo - средняя частота заполнения радиоимпульсов (fo=(f(0)+f(N-1))/2), при этом начало второй последовательности задерживают относительно начала первой последовательности на время Tc=NTp (излучают вторую последовательность после окончания первой) или Тс=Тр/2 (каждый n-й импульс второй последовательности излучают после n-го импульса первой), а после излучения каждого радиоимпульса через приемную антенну РЛС в выбранном временном интервале принимают отраженные от облучаемого объекта радиолокационные сигналы, причем начало этого интервала задерживают относительно начала излученного импульса на время t0>τ, а конец интервала задерживают на время t1<Tp, если Tc=NTp, или t1<Tp/2, если Tc=Тр/2, при этом величину t0 выбирают одинаковой для всех импульсов обеих последовательностей, принятые сигналы с высокой частоты заполнения импульсов fa(n) и fb(n) переносят на нулевую частоту с одновременным преобразованием в комплексную форму, оцифровывают эти сигналы с временным дискретом Δt, не превышающим длительности радиоимпульса τ, и записывают полученные отсчеты в массивы комплексных входных сигналов sa(m,n) для последовательности с возрастающей частотой заполнения импульсов fa(n) и sb(m,n) для последовательности с убывающей частотой заполнения импульсов fb(n), где m - номера отсчетов (m=0, 1, 2, …, М-1), а число отсчетов выбирают из условия M=(t1-t0)/Δt, причем первые отсчеты (m=0) соответствуют моментам времени t0, затем с использованием полученных массивов sa(m,n) и sb(m,n) определяют значение радиальной скорости Vr, путем выбора этого значения скорости Vr из интервала Vmin÷Vmax возможных значений искомой скорости Vr по экстремуму модуля корреляционной функции  , где Fb*(m,k) - массив комплексно-сопряженный массиву Fb(m,k), при этом Fa(m,k)=Ф{ua(m,n)} и Fb(m,k)=Ф{ub(m,n)}, где k=0, 1, 2, ..., N-1; Ф{} - дискретное преобразование Фурье, ua(m,n)=sa(m,n)eiφ(n) и ub(m, n)=sb(m,N-n-1)eiφ(N-n-1), причем значения фазовых коэффициентов φ(n) вычисляют для каждого выбранного значения скорости V по формуле φ(n)=-4πТр(V/c)(n+1/2)(fo+Δf(n-(N-1)/2)), где с - скорость распространения радиоволн в пространстве.
, где Fb*(m,k) - массив комплексно-сопряженный массиву Fb(m,k), при этом Fa(m,k)=Ф{ua(m,n)} и Fb(m,k)=Ф{ub(m,n)}, где k=0, 1, 2, ..., N-1; Ф{} - дискретное преобразование Фурье, ua(m,n)=sa(m,n)eiφ(n) и ub(m, n)=sb(m,N-n-1)eiφ(N-n-1), причем значения фазовых коэффициентов φ(n) вычисляют для каждого выбранного значения скорости V по формуле φ(n)=-4πТр(V/c)(n+1/2)(fo+Δf(n-(N-1)/2)), где с - скорость распространения радиоволн в пространстве.
| СПОСОБ ОПРЕДЕЛЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ПЕРЕМЕЩЕНИЯ ДВИЖУЩЕГОСЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С НЕИЗВЕСТНЫМИ ПАРАМЕТРАМИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2211460C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ОПРЕДЕЛЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ | 2003 |
|
RU2236694C1 |
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2003 |
|
RU2255352C2 |
| СПОСОБ ОБНАРУЖЕНИЯ РАДИОКОНТРАСТНЫХ ОБЪЕКТОВ И ИЗМЕРЕНИЯ СКОРОСТИ И УСКОРЕНИЯ СБЛИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С НИМИ | 2004 |
|
RU2268479C1 |
| СПОСОБ ВЫПЛАВКИ ФЕРРОМАРГАНЦА В ДОМЕННОЙ ПЕЧИ | 1999 |
|
RU2148651C1 |

