Изобретение относится к области радиолокации и предназначено для использования в импульсно-доплеровских (ИД) радиолокационных станциях (РЛС), работающих с высокой частотой повторения (ВЧП) импульсов в режиме разрешения близкорасположенных целей в одной (выбранной, основной) группе при наличии нескольких (дополнительных) групп. Достигаемым техническим результатом для РЛС, решающих задачу разрешения в группе близкорасположенных целей (ГБЦ), является исключение наложения на доплеровский сигнал основной ГБЦ доплеровских сигналов дополнительных ГБЦ, наблюдаемых в одном луче диаграммы направленности (ДН) антенны ИД РЛС на дальностях, превышающих однозначную дальность в режиме ВЧП, и движущихся с одинаковой радиальной скоростью.
Указанный результат достигается тем, что по полученным в режимах обнаружения (сопровождения) целей РЛС целеуказаниям (ЦУ), содержащим информацию о дальностях и радиальных скоростях всех обнаруженных ГБЦ (основной и дополнительных), в режиме разрешения целей в любой ГБЦ определяют уменьшенную рабочую частоту повторения зондирующих импульсов, обеспечивающую прием сигналов, отраженных от основной ГБЦ, в интервале между излучениями зондирующих сигналов и исключающую наложение доплеровских сигналов основной и дополнительных ГБЦ, движущихся с одинаковой радиальной скоростью.
В современных ИД РЛС в качестве зондирующих сигналов используются когерентные последовательности импульсов. Основной операцией при обработке принятых сигналов является выделение из их спектра доплеровских частотных составляющих. За счет когерентного накопления энергии отраженных сигналов в узкополосных доплеровских фильтрах достигается требуемое отношение сигнал-шум для обнаружения движущихся целей. ВЧП импульсов позволяет однозначно обнаруживать движущиеся цели по скорости с одновременным разрешением их по дальности и скорости в области доплеровских частот [1].
Известно устройство обработки сигналов в ИД РЛС, выполняющее операции согласования опорного сигнала с сигналом, отраженным от цели, в два этапа: на первом этапе выполняется согласование во временной области путем стробирования видеоимпульсами сигналов по дальности, а на втором - согласование по доплеровским частотам путем введения набора узкополосных доплеровских фильтров, выполняющих роль интеграторов, с выходов которых сигналы поступают через амплитудный детектор, пороговое устройство и оперативное запоминающее устройство на процессор обработки сигналов и далее на процессор обработки данных [1, стр. 322-324].
Известна ИД РЛС, приемный тракт которой выполнен по традиционной схеме супергетеродинных приемников, выходные сигналы которого в цифровом виде поступают в процессор РЛС, осуществляющий обнаружение целей и измерение их координат [2, стр. 235-248]. В каждом канале дальности с помощью цифрового фильтра выполняется частотная селекция области, свободной от мешающих отражений, и доплеровская фильтрация принимаемых сигналов с помощью эффективного алгоритма быстрого преобразования Фурье (БПФ). После операции БПФ осуществляется формирование модуля выходного сигнала фильтров доплеровской селекции, который поступает на пороговую схему для сравнения с порогом обнаружения. Далее производится оценка доплеровского смещения частоты и дальности до цели.
Недостатком этих систем и устройств является возможность наложения в дальностно-частотном портрете (ДЧП) на доплеровский сигнал основной (выбранной) ГБЦ доплеровских сигналов дополнительных ГБЦ, наблюдаемых в одном луче ДН антенны ИД РЛС на различных дальностях, превышающих однозначную, и движущихся с одинаковой радиальной скоростью.
Наиболее близким по технической сущности аналогом заявляемого изобретения, принятым за прототип, является устройство, реализующее метод цифровой обработки сигналов (ЦОС) в ИД РЛС, структурная схема которого представлена в [3].
В указанном методе с помощью цифрового формирования квадратурных составляющих определяют комплексную огибающую сигналов, поступающих с выхода усилителя промежуточной частоты, выполняют ее согласованную фильтрацию, формируют дальностно-временной портрет (ДВП) и ДЧП целей, вычисляют модули спектров сигналов и выполняют его пороговую обработку.
Под ДВП радиолокационной цели понимается двумерная матрица, сформированная из дискретных отсчетов эхосигналов, соответствующих разным каналам дальности, путем многократного зондирования пространства. Сигнал каждого столбца ДВП представляет собой отсчеты эхосигналов, полученные в одном периоде зондирования и соответствующие последовательно во времени всем каналам дальности. Сигнал каждой строки в ДВП (доплеровский сигнал) представляет собой отсчеты эхосигналов, соответствующие одному каналу дальности во всех периодах излучения зондирующего сигнала.
Под ДЧП радиолокационной цели понимается двумерная матрица, сформированная из дискретных отсчетов, представляющих собой одномерное дискретное преобразование Фурье (ДПФ) отсчетов доплеровских сигналов каждой строки ДВП, полученных с помощью алгоритма БПФ.
Недостаток прототипа, так же, как и аналогов, заключается в том, что при обработке наблюдаемых в одном луче ДН антенны ИД РЛС эхосигналов ГБЦ, движущихся с одинаковыми радиальными скоростями и находящихся на различных дальностях, отличающихся более чем на однозначную, возможно наложение в ДЧП их доплеровских сигналов.
Предлагаемое изобретение направлено на преодоление указанного недостатка прототипа и аналогов.
Техническим результатом заявляемого изобретения является исключение наложений в ДЧП на доплеровские сигналы целей основной ГБЦ доплеровских сигналов целей дополнительных ГБЦ, наблюдаемых в одном луче ДН антенны ИД РЛС на разных дальностях и движущихся с одинаковыми радиальными скоростями при условии, что расстояния между основной и дополнительными ГБЦ превышают однозначную дальность в режиме ВЧП.
Указанный технический результат достигается тем, что в способе ЦОС в ИД РЛС с ВЧП в режиме разрешения целей в ГБЦ, по полученным (ЦУ), содержащим информацию о дальностях и радиальных скоростях обнаруженных ГБЦ, определяют базовую частоту повторения импульсов, превышающую максимальную доплеровскую частоту сигнала ГБЦ, движущейся с максимальной скоростью, формируют в диапазоне частот от нуля до базовой частоты повторения целое число равных частотных полос, в одной из которых должен находиться весь спектр доплеровского сигнала основной ГБЦ, рассчитывают уменьшенную частоту повторения, превышающую ширину спектра доплеровского сигнала основной ГБЦ, путем деления базовой частоты повторения на целое число сформированных частотных полос, и вычисляют рабочую частоту повторения, обеспечивающую прием сигналов, отраженных от основной ГБЦ в интервале между излучениями зондирующих сигналов, и исключающую наложение доплеровских сигналов основной и дополнительных ГБЦ, движущихся с одинаковой радиальной скоростью, и минимально превышающую полученную уменьшенную частоту повторения.
Заявляемый способ ЦОС в ИД РЛС с ВЧП зондирующих импульсов заключается в следующем.
1. По полученным в режимах обнаружения (сопровождения) целей РЛС ЦУ определяется базовая частота повторения Fп1, которая превышает доплеровскую частоту сигналов ГБЦ, движущейся с максимальной скоростью.
2. Используя полученную базовую частоту Fп1 и содержащуюся в ЦУ информацию о скорости, рассчитывается ДЧП обнаруженных ГБЦ, в котором весь диапазон частот от 0 до Fп1 делится на целое число равных частотных полос KДЧ, размером не менее ширины спектра доплеровского сигнала основной ГБЦ, в одну из которых должен укладываться весь этот спектр (с возможными турбинными помехами).
Коэффициент деления по частоте KДЧ рассчитывается последовательно делением всего диапазона частот от 0 до Fп1 на 2 равные полосы с проверкой условия нахождения всего спектра доплеровского сигнала выбранной ГБЦ в пределах одной из полос, затем на 3 равные полосы с соответствующей проверкой, затем на 4 и т.д., до получения максимального значения KДЧ.
В общем случае коэффициент KДЧ может иметь несколько значений, удовлетворяющих указанному условию. Минимальный KДЧ (равный 2 или 3) обеспечивает минимальные потери в отношении сигнал-шум (ОСШ), а максимальный KДЧ позволяет увеличить период зондирования и вероятность разделения ГБЦ (исключение наложений). Выбор величины KДЧ определяется условиями эксплуатации и параметрами реальной РЛС.
3. Путем деления базовой частоты повторения на полученное число KДЧ рассчитывается уменьшенная частота повторения зондирующих сигналов Fп2=Fп1/KДЧ, превышающая ширину спектра доплеровского сигнала основной ГБЦ.
Рабочая частота повторения Fп3 вычисляется путем последовательного увеличения полученной уменьшенной частоты повторения Fп2 (с минимальным реализуемым в РЛС приращением по частоте) до выполнения условий отсутствия сигналов, отраженных от основной ГБЦ, во время излучения очередных зондирующих импульсов и исключения наложения в ДЧП доплеровских сигналов основной и дополнительных ГБЦ, движущихся с одинаковой скоростью.
Указанный технический результат реализуется в известном устройстве ЦОС в ИД РЛС с ВЧП, содержащем определитель базовой частоты повторения, превышающей максимальную доплеровскую частоту сигнала ГБЦ, движущейся с максимальной скоростью, вход которого является входом устройства, в которое введены последовательно подключенные к выходу определителя базовой частоты повторения формирователь целого числа равных частотных полос, второй вход которого подключен ко входу устройства, и вычислитель рабочей частоты повторения зондирующих сигналов, превышающей ширину спектра доплеровского сигнала основной ГБЦ, второй вход которого подключен к выходу определителя базовой частоты повторения, третий вход подключен ко входу устройства, а выход вычислителя рабочей частоты повторения является выходом устройства.
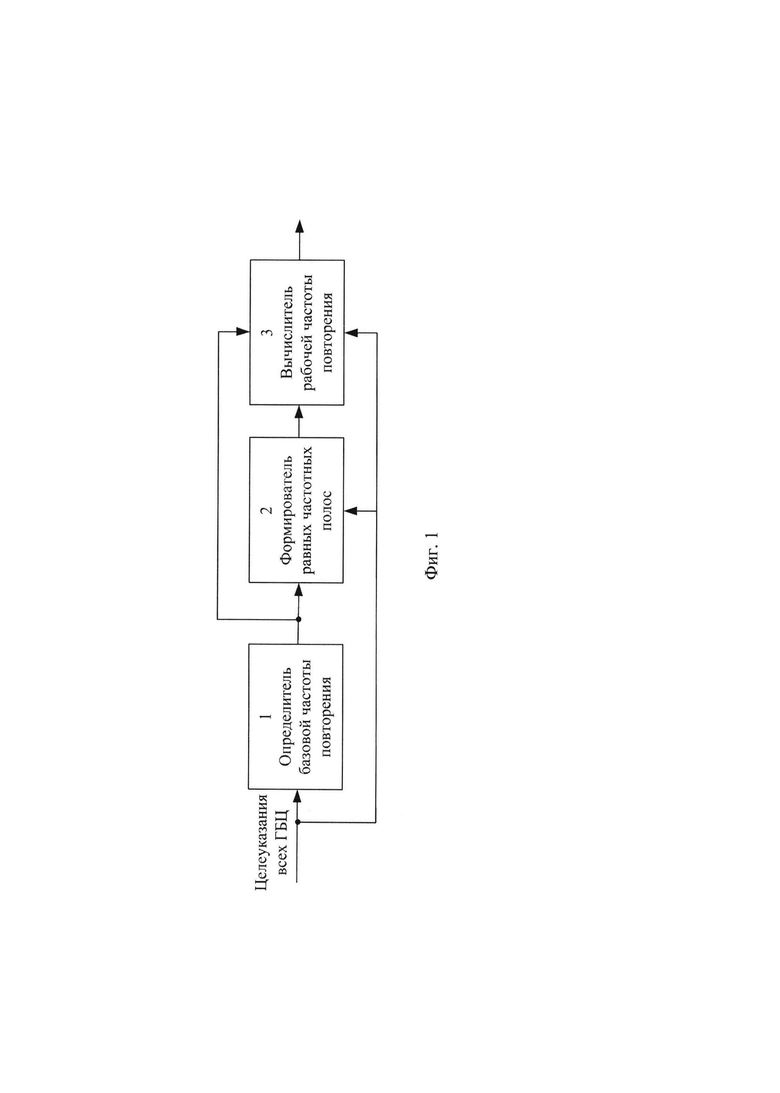
Сущность предлагаемого изобретения поясняется структурной схемой, приведенной на фиг. 1, где обозначено:
1 - определитель базовой частоты повторения (ОБЧП);
2 - формирователь равных частотных полос (ФРЧП);
3 - вычислитель рабочей частоты повторения (ВРЧП).
Входом устройства является вход ОБЧП 1, выход которого соединен с первым входом ФРЧП 2, второй вход которого подключен ко входу устройства, а выход соединен с первым входом ВРЧП 3, второй вход которого подключен к выходу ОБЧП 1, третий вход подключен ко входу устройства, а выход ВРЧП 3 является выходом устройства.
Устройство ЦОС в ИД РЛС с ВЧП импульсов работает следующим образом. На вход ОБЧП 1, являющийся входом устройства, подаются ЦУ всех обнаруженных ГБЦ (основной и дополнительных), содержащие информацию об их дальности и скорости, на основе которых выбирается базовая частота повторения, превышающая максимальную доплеровскую частоту сигнала ГБЦ. Определенное значение базовой частоты повторения Fп1 подается на первый вход ФРЧП 2, на второй вход которого поступает ЦУ обнаруженных ГБЦ со входа устройства. По этим данным в ФРЧП 2 рассчитывается ДЧП и формируется допустимое для конкретной РЛС число равных частотных полос, превышающих ширину спектра доплеровского сигнала основной ГБЦ. С выхода ФРЧП 2 число KДЧ, равное количеству сформированных частотных полос, подается на первый вход ВРЧП 3, на второй вход которого поступает значение базовой частоты повторения Fп1 с выхода ОБЧП 1, а на третий вход подаются ЦУ всех ГБЦ со входа устройства. На основании этих данных ВРЧП 3 производится вычисление рабочей частоты повторения импульсов Fп3, обеспечивающей прием сигналов, отраженных от основной ГБЦ, в интервале между излучениями зондирующих сигналов и исключающей наложение в ДЧП доплеровских сигналов основной и дополнительных ГБЦ, движущихся с одинаковой скоростью. Расчет рабочей частоты повторения Fп3 производится перебором в сторону повышения с минимальным шагом частоты Fп2, полученной делением базовой частоты повторения зондирующих сигналов Fп1 (второй вход ВРЧП 3) на число равных частотных полос KДЧ (первый вход ВРЧП 3). Вычисленное значение рабочей частоты повторения Fп3 с выхода ВРЧП 3 подается на выход устройства.
Вычисление рабочей частоты повторения осуществляется на основе следующих положений.
В процессоре ЦОС ИД РЛС в режиме ВЧП после получения ЦУ эхосигнал ГБЦ однозначно идентифицируется номером центрального отсчета отклика ГБЦ, по которому определена дальность:

где  - целое число периодов повторения на временном интервале tз;
- целое число периодов повторения на временном интервале tз;
 - время задержки отклика ГБЦ;
- время задержки отклика ГБЦ;
DГ - дальность ГБЦ, содержащаяся в ЦУ;
с - скорость света в вакууме;
Тп - период повторения импульсов;
 - число отсчетов в периоде повторения;
- число отсчетов в периоде повторения;
Тд - период дискретизации;
Fп - частота повторения импульсов;
Fд - частота дискретизации сигналов;
 - число отсчетов от начала (q+1)-го зондирующего импульса до центрального отсчета эхосигнала ГБЦ;
- число отсчетов от начала (q+1)-го зондирующего импульса до центрального отсчета эхосигнала ГБЦ;
int() - арифметическая операция вычисления целой части числа;
mod() - арифметическая операция вычисления остатка от деления.
Таким образом, взаимное положение эхосигналов всех ГБЦ на ДЧП характеризуется соотношением значений pi для каждой i-ой ГБЦ. Поэтому изменением периода (частоты) повторения зондирующих импульсов можно добиться такого положения откликов всех ГБЦ (набора значений pi), при котором исключаются наложения в ДЧП доплеровских сигналов основной и дополнительных ГБЦ, движущихся с одинаковой скоростью.
На основе этого вычисление рабочей частоты повторения Fп3 заключается в последовательном уменьшении периода повторения (соответствующего частоте повторения Fп2) на целое число j периодов дискретизации: Тпj=Тп2-jТд и проверке выполнения следующих условий:
- эхосигнал основной ГБЦ расположен между очередными зондирующими импульсами, т.е.

где Nи - количество отсчетов в зондирующем импульсе;
Np - количество отсчетов эхосигнала ГБЦ;
pосн j - количество отсчетов от начала зондирующего импульса до центрального отсчета эхосигнала основной ГБЦ при периоде повторения Тпj;
 - количество отсчетов в периоде повторения зондирующих импульсов Тпj;
- количество отсчетов в периоде повторения зондирующих импульсов Тпj;
- отсутствует перекрытие эхосигнала основной ГБЦ с эхосигналами дополнительных ГБЦ, т.е.
 если
если 
или

или
(pmj-Nj+Np)≤pосн j≤(pmj-Np), если 
где m - индексы дополнительных ГБЦ.
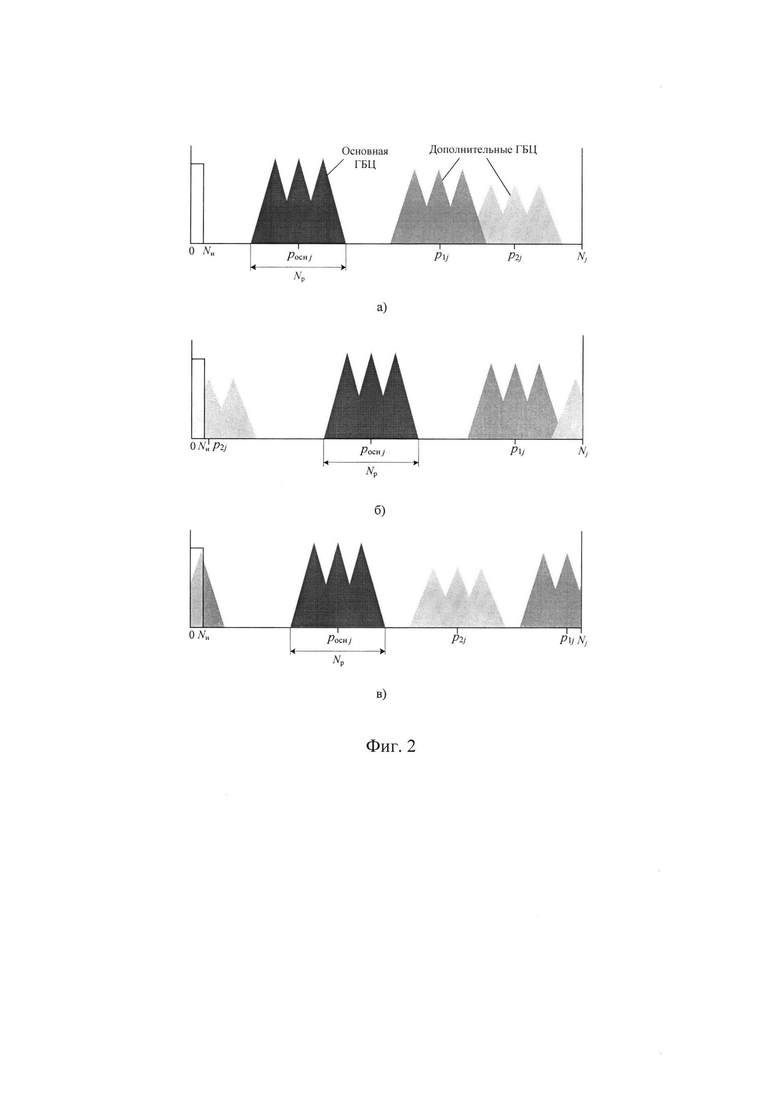
Первая строка условия (3) соответствует случаю, когда отклики всех ГБЦ расположены в пределах периода повторения; вторая - случаю, когда часть отклика дополнительной ГБЦ слева от центрального отсчета накладывается на зондирующий импульс; третья строка - случаю, когда часть отклика дополнительной ГБЦ справа от центрального отсчета накладывается на зондирующий импульс.
Иллюстрации рассмотренных случаев взаимного расположения откликов для трех ГБЦ, состоящих из трех одиночных целей (ОЦ), схематично изображены на фиг. 2, где показаны случаи взаимного расположения откликов трех ГБЦ: фиг. 2а соответствует первой строке условия (3), фиг. 2б - первой и второй строкам условия (3) и фиг. 2в - первой и третьей строкам условия (3).
В общем случае рабочая частота повторения Fп3 определяется за M шагов уменьшения периода повторения Tп2:
 Tп3=Tп2-MTд, M∈[0,N0-2Np-Nи],
Tп3=Tп2-MTд, M∈[0,N0-2Np-Nи],
где N0 - количество отсчетов в периоде повторения при уменьшенной частоте повторения Fп2.
Для подтверждения правильности предлагаемого способа цифровой обработки сигналов в ИД РЛС с ВЧП зондирующих импульсов и возможности получения технического результата рассмотрим задачу выделения в режиме разрешения целей в ГБЦ эхосигнала одной заданной ГБЦ при одновременном присутствии нескольких ГБЦ, движущихся с такой же радиальной скоростью, но находящихся на других относительно заданной ГБЦ дальностях, превышающих однозначную.
Исходя из открытых источников информации, максимальная скорость современных истребителей достигает 2700 км/ч (750 м/с). Для моделирования обработки сигналов в ИД РЛС зададимся скоростями носителя и цели, равными V=700 м/с [4, 5]. С учетом максимально возможного доплеровского сдвига частоты, обусловленного скоростью сближения носителя и цели, выберем базовую частоту повторения зондирующих импульсов Fп1=120 кГц, а частоту дискретизации комплексной огибающей принятых эхосигналов Fд=6 МГц. В качестве типового зондирующего сигнала используем радиоимпульс с прямоугольной огибающей длительностью 0,5 мкс. После согласованной фильтрации формируются треугольные огибающие радиоимпульсов длительностью 1,0 мкс.
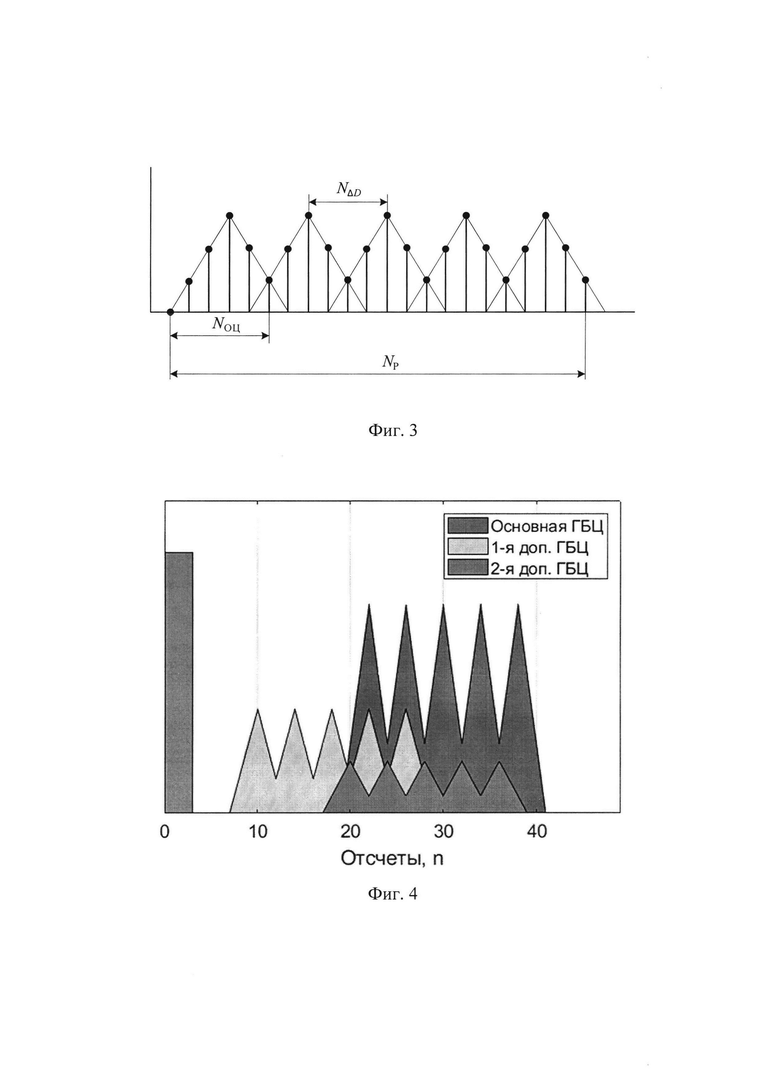
Длительности зондирующего сигнала τИ=0,5 мкс соответствует NИ=3 отсчета; а длительность отклика одиночной цели (ОЦ) на выходе согласованного фильтра составляет NОЦ=2NИ=6 отсчетов. Расстояние между ОЦ в составе ГБЦ положим равным ΔD=100 м, что соответствует NΔD=4 отсчетам. На фиг. 3 изображен пример эхосигнала ГБЦ, состоящей из пяти ОЦ.
Количество отсчетов в эхосигнале ГБЦ Np определяется количеством ОЦ МОЦ в ГБЦ и для принятых ранее параметров сигналов и характеристик ГБЦ приведено в таблице 1.
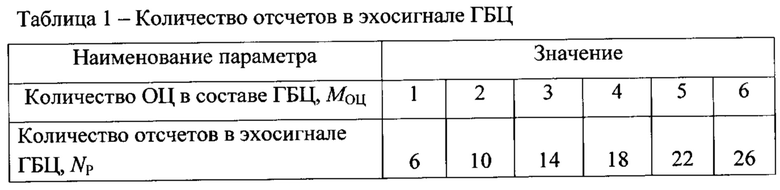
Очевидно, что разделение ГБЦ по дальности возможно лишь при количестве отсчетов в периоде повторения N≥2Np. Так, в соответствии с таблицей 1, при базовой частоте Fп1=120 кГц, которой соответствует количество отсчетов по дальности N=50, разделение по дальности даже двух ГБЦ, состоящих из шести ОЦ, теоретически невозможно. Разделение трех и более ГБЦ, состоящих из пяти ОЦ, возможно, но при условии, что все эхосигналы дополнительных ГБЦ будут практически наложены друг на друга. На практике вероятность этого события крайне мала. Для исключения наложения эхосигналов (повышения вероятности этого события) требуется использовать заявляемый способ.
В качестве примера рассмотрим три ГБЦ, содержащие по пять ОЦ (МОЦ=5) и находящиеся на дальностях: основная DГ осн=63,25 км; дополнительные DГ1=112,94 км; DГ2=131,94 км.
На базовой частоте повторения, равной Fп1=120 кГц, центральные отсчеты откликов ГБЦ соответствуют значениям pосн 0=30; p10=18; p20=28, и наблюдается наложение эхосигналов ГБЦ, что иллюстрируется диаграммами их расположения на фиг. 4.
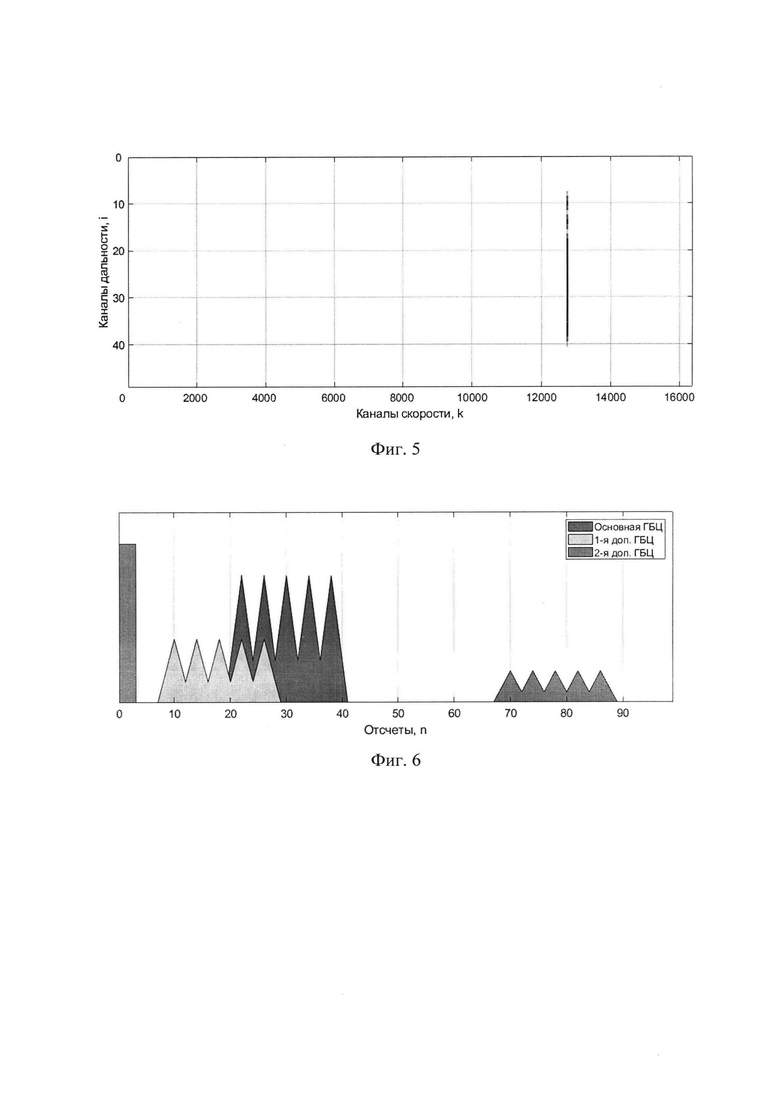
В ДЧП радиолокационной цели длина строки равна размеру БПФ NБПФ отсчетов доплеровских сигналов, соответствующих одному каналу дальности во всех периодах излучения зондирующего сигнала. Полагая NБПФ=16К (К=1024), получим, что спектральная составляющая, соответствующая скорости цели, равна k=12743, т.е. спектр сигнала попадает во вторую половину спектра доплеровского сигнала цели.
ДЧП целей размером 50Х16К на базовой частоте повторения приведен на фиг. 5.
Выберем коэффициент деления по частоте KДЧ=2, обеспечивающий минимальные потери в ОСШ. Тогда уменьшенная частота повторения будет равна Fп2=60 кГц, и соответственно, N=100. На данной частоте центральные отсчеты откликов ГБЦ соответствуют значениям pосн 0=30; p10=18; p20=78, и также наблюдается наложение эхосигналов ГБЦ, что иллюстрируется диаграммами их расположения на фиг. 6.
На рабочей частоте повторения Fп3=62,5 кГц (N=96), сформированной за четыре (j=4) шага изменения Fп2, центральные отсчеты откликов ГБЦ соответствуют значениям pосн 4=34, p14=6, p24=94 и наблюдается отсутствие наложения эхосигналов дополнительных ГБЦ на эхосигнал основной ГБЦ, что иллюстрируется диаграммами их расположения на фиг. 7.
Соответствующий ДЧП размером 96Х8К приведен на фиг. 8.
Таким образом, в отличие от аналога, заявленный способ и устройство для его осуществления обеспечивают исключение наложения в ДЧП на доплеровский сигнал основной ГБЦ доплеровских сигналов дополнительных ГБЦ, наблюдаемых в одном луче ДН антенны ИД РЛС на разных дальностях и движущихся с одинаковой радиальной скоростью.
Результаты проведенного моделирования подтверждают работоспособность и высокую эффективность использования в ИД РЛС предлагаемого способа цифровой обработки радиолокационных сигналов и устройства для его реализации.
Источники информации
1. Канащенков А.И., Меркулов В.И., Герасимов А.А. и др. Радиолокационные системы многофункциональных самолетов. Т. 1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2006. - 655 с.
2. Дудник П.И., Ильчук А.Р., Татарский Б.Г. Многофункциональные радиолокационные системы. Уч. пособие для вузов / Под ред. Б.Г. Татарского. - М.: Дрофа, 2007. - 283 с.
3. Маркович И.И. Цифровая обработка сигналов в системах и устройствах: монография / И.И. Маркович. - Ростов-на-Дону, Издательство ЮФУ, 2012. - 236 с.
4. Маркович И.И., Завтур Е.Е. Разрешение целей по дальности бортовой РЛС: Радиолокационные системы специального и гражданского назначения 2015-2017. Монография / Под ред. Ю.И. Белого. - М.: Радиотехника, 2016. - С. 201-212.
5. Маркович И.И., Завтур Е.Е. Методы цифровой обработки сигналов, отраженных от высокоманевренных воздушных целей // Вестник воздушно-космической обороны. - М.: Изд-во ПАО «НПО «Алмаз». - 2016, вып. 3(11). - С. 17-23.

Изобретение относится к области радиолокации и предназначено для использования в импульсно-доплеровских (ИД) радиолокационных станциях (РЛС), работающих с высокой частотой повторения (ВЧП) импульсов в режиме разрешения близкорасположенных целей. Достигаемый технический результат - исключение наложения на доплеровский сигнал основной группы близкорасположенных целей (ГБЦ) доплеровских сигналов дополнительных ГБЦ, наблюдаемых в одном луче диаграммы направленности (ДН) антенны ИД РЛС на дальностях, превышающих однозначную дальность РЛС в режиме ВЧП, и движущихся с одинаковой радиальной скоростью. Указанный результат достигается за счет того, что используется уменьшенная частота повторения зондирующих сигналов, превышающая ширину спектра доплеровского сигнала основной ГБЦ, а также за счет того, что устройство, реализующее способ, содержит определитель базовой частоты повторения, формирователь равных частотных полос и вычислитель рабочей частоты повторения, определенным образом соединенные между собой. 2 н.п. ф-лы, 8 ил., 1 табл.
1. Способ цифровой обработки сигналов в импульсно-доплеровской РЛС с высокой частотой повторения в режиме разрешения целей в группе близкорасположенных целей (ГБЦ), заключающийся в том, что по полученным целеуказаниям, содержащим информацию о дальностях и радиальных скоростях обнаруженных ГБЦ, определяют базовую частоту повторения импульсов, превышающую максимальную доплеровскую частоту сигнала ГБЦ, движущейся с максимальной скоростью, формируют в диапазоне частот от нуля до базовой частоты повторения целое число равных частотных полос, в одной из которых должен находиться весь спектр доплеровского сигнала основной ГБЦ, рассчитывают уменьшенную частоту повторения, превышающую ширину спектра доплеровского сигнала основной ГБЦ, путем деления базовой частоты повторения на целое число сформированных частотных полос и вычисляют рабочую частоту повторения, обеспечивающую прием сигналов, отраженных от основной ГБЦ, в интервале между излучениями зондирующих сигналов и исключающую наложение доплеровских сигналов основной и дополнительных ГБЦ, движущихся с одинаковой радиальной скоростью, и минимально превышающую полученную уменьшенную частоту повторения.
2. Устройство цифровой обработки сигналов в импульсно-доплеровской РЛС с высокой частотой повторения, предназначенное для осуществления способа по п. 1, содержащее определитель базовой частоты повторения, превышающей максимальную доплеровскую частоту сигнала ГБЦ, движущейся с максимальной скоростью, вход которого является входом устройства, отличающееся тем, что содержит последовательно подключенные к выходу определителя базовой частоты повторения формирователь целого числа равных частотных полос, второй вход которого подключен ко входу устройства, и вычислитель рабочей частоты повторения зондирующих сигналов, превышающей ширину спектра доплеровского сигнала основной ГБЦ, второй вход которого подключен к выходу определителя базовой частоты повторения, третий вход подключен ко входу устройства, а выход вычислителя рабочей частоты повторения является выходом устройства.
| ЦИФРОВОЕ МНОГОКАНАЛЬНОЕ КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ ПРИЕМНОЕ УСТРОЙСТВО С СЕЛЕКЦИЕЙ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2006 |
|
RU2319170C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС | 2015 |
|
RU2594005C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2004 |
|
RU2262122C1 |
| СПОСОБ ПЕРВИЧНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ НА ФОНЕ УЗКОПОЛОСНЫХ ПАССИВНЫХ ПОМЕХ | 2016 |
|
RU2641727C1 |
| JP 2009063507 A, 26.03.2009 | |||
| JP 2011226796 A, 10.11,2011 | |||
| US 5748142 A, 05.05.1998 | |||
| Устройство для компенсацииэКСцЕНТРиСиТЕТА ВАлКОВ пРи ABTO-МАТичЕСКОМ РЕгулиРОВАНии ТОлщиНыпРОКАТыВАЕМОй пОлОСы | 1979 |
|
SU818691A1 |

