Настоящее изобретение относится к устройству для придания общей подвижности тела человека, то есть к устройству, обеспечивающему приведение в движение туловища, конечностей и суставов тела человека, а также применение такого устройства.
Данный тип устройства предназначен, предпочтительно, но не исключительно, для использования под наблюдением кинезитерапевта, который определяет движения восстановления подвижности, производимые устройством.
Недавние исследования в нейрофизиологии показывают, что эффективность медицинского обслуживания кинезитерапией или лечением болезней манипуляцией над суставами, осуществляемым, например, на травмированном теле человека, стареющем человеке или здоровом теле человека, а также на спортсмене, занимающемся спортом на профессиональном уровне, связана со стимуляцией нейробиомеханических возможностей тела человека. Действительно, чтобы стоять на ногах и управлять своим телом, человек получает информацию от различных датчиков, в частности датчиков суставных, вестибулярных, зрительных, кожных и т.д. Мозг получает эту информацию и сравнивает их с внутренними моделями, врожденными или приобретенными, в зависимости от которых человек уточняет ответные телесные движения. Однако эти внутренние модели иногда недостаточно точны для того, чтобы отвечать новым условиям, некоторые из этих моделей могут быть потеряны или не приобретены ранее в результате тренировок. Понятно, что разнообразие этих моделей зависит от способности тела человека адаптироваться к трудностям окружающей среды, в которой он перемещается или действует. Кроме этого, для того чтобы отдаваемые мозгом телу тела человека команды эффективно исполнялись, суставы тела человека должны быть функционально реактивными, и мускулы, которые поддерживают эти суставы, должны быть сильными и гибкими. Однако часть двигательных возможностей тела человека может быть утеряна, в частности, вследствие осложнения, при старении, либо когда он принимает неприемлемые рабочие положения или когда он испытывает нервное перенапряжение.
Отсюда понятно, что восстановление или тренировка нейробиомеханических компетенций тела человека требует стимуляций и одновременных имитаций, также полных и, насколько это возможно, изменяемых, его мускуло-артикулярных функций и его нейровигильных способностей.
Устройства, обеспечивающие такое восстановление и такую тренировку, в настоящее время по существу отсутствуют. Несколько известных устройств образованы обычно приводной платформой, которая одновременно опирается и совершает колебания на центральной опорной оси, как описано в US-A 2827894 и US-4313603. Движения этих платформ вызывают нарушение равновесия туловища тела человека, находящегося на платформе, и вызывают, таким образом, реакции со стороны тела. Однако, на практике, так как все движения для сохранения равновесия, вызываемые этими устройствами, сконцентрированы на их центральной опорной оси, туловище человека не разбалансировано или только слегка: во время движения устройства поддерживающий туловище тела человека полигон, то есть виртуальная поверхность между точками опоры ног тела человека, стоящего на платформе, внутрь которой должен проецироваться центр тяжести туловища тела человека, для того чтобы последний не потерял полностью равновесия и не упал, остается отцентрированным относительно центральной опорной оси. Другими словами, сагиттальная ось туловища тела человека остается, в целом, в продолжение центральной опорной оси, что позволяет телу только умеренно реагировать и всегда одинаковым образом. Кроме того, вес тела человека и усилия, которые он прикладывает для того, чтобы не упасть, суммируются на центральной опорной оси, что требует, для ограничения риска повреждения, изготавливать ее с особо повышенным сопротивлением, в частности, в виде карданного соединения. Движущая сила, необходимая для привода платформы, должна, таким образом, быть правильно рассчитана, что приводит к увеличению веса устройства и его размеров.
US-A-5813958 предлагает также устройство с приводной платформой, совершающей колебания, что, в некоторых вариантах осуществления, включает платформу для удержания тела человека, имеющую такой предварительный наклон, что центр платформы размещен эксцентрично на фиксированном расстоянии от вертикальной оси, вокруг которой вращается платформа. Действительно, нарушение равновесия тела человека является более значительным, чем в упомянутых выше устройствах, но в связи с фиксированным наклоном платформы, связанной непосредственно с конструкцией устройства, осуществляемые движения восстановления подвижности имеют неподвижную кинематику и, следовательно, малоэффективную и малопроизводительную в том смысле, что тело человека быстро учитывает фиксированное смещение платформы для быстрого восстановления равновесия и нейтрализации нейробиомеханической стимуляции, обеспечиваемой устройством, предвосхищая характеристики этой стимуляции. Кроме того, конструкция устройства является особенно тяжелой и громоздкой из-за размещения между основанием устройства и его платформой вращающегося диска, на который опирается платформа для предварительного наклона.
Целью настоящего изобретения является предложение устройства для восстановления общей подвижности человеческого тела, которое, будучи надежным, легким и негромоздким, позволяет одновременно нарушать равновесие тела человека и значительно перемещать опорный полигон и центры мгновенного давления тела человека эффективным и контролируемым образом для того, чтобы воздействовать на тело в соответствии с разработанными движениями для усиления и тренировки нейробиомеханической компетенции тела человека.
Для этого изобретение предлагает устройство для восстановления общей подвижности человеческого тела, как оно описано в пункте 1 формулы изобретения.
Благодаря устройству по изобретению центр опорного полигона и центр мгновенного давления тела человека могут быть смещены в поперечном направлении от фиксированной оси, определяемой устройством: когда тело человека стоит на платформе, ее опорный полигон, в общем, находится в центральной зоне платформы, хотя зона может быть размещена в стороне от фиксированной оси. Это смещение центра платформы сопровождается наклоном последней, управляемым периферическими опорными средствами, которыми снабжена платформа, что вызывает нарушение равновесия тела человека и активацию его нейробиомеханических способностей, как показано выше. При работе, когда платформа эксцентрично приводится во вращение вокруг фиксированной оси, тело тела человека, благодаря центробежной силе, становится подвижным по окружности и в линейном направлении, параллельно плоскости платформы, вследствие наклона платформы. Другими словами, устройство по изобретению осуществляет контролируемые движения платформы, которые нарушают равновесие тела человека, вызывая перемещение по окружности и боковое смещение опорного полигона и центров мгновенного давления тела человека.
Центробежный эффект такого перемещения сказывается, в частности, на всех частях тела, которые образуют цилиндрический столб, состоящий из комплекса туловище/живот. Реакцией на эту центробежную силу является значительное сопротивление центростремительного восстановления всех мускулов тела.
Устройство по изобретению осуществляет, таким образом, нейробиомехеническое воздействие на суставный, мускульный и информационный комплекс тела человека для придания ему, насколько это возможно, всего своего динамического потенциала или для того, чтобы ввести его в нейромоторные границы регулирования. На практике устройство производит различные типы воздействий, таких как вестибулярные, суставные, кожные, постуральные, мускульные, нейрологические, тазовомочеполовые воздействия и т.д. Действительно, в соответствии с настройкой приводных средств и в соответствии с положением тела человека на платформе координированно мобилизуются различные зоны всего тела. Когда, например, тело человека стоит на платформе, можно сделать подвижными только его ноги, его ноги и его туловище или его ноги, его туловище и его руки. В соответствии с управляемой мускульной мобилизацией восстановление подвижности тела сопровождается значительным сжиганием калорий. В общем, при нахождении на устройстве тело тела человека не рассматривается как стабильный жесткий объект: напротив, тело является деформируемым и содержит большое количество суставов, которые имеют такое количество степеней свободы, чтобы удерживать контроль над положением тела и получать различную и сложную пространственную ориентацию. Кинетически позиционные движения, осуществляемые телом человека на устройстве, обеспечивают координацию различных суставных элементов его тела: в ответ на движение платформы тело человека определяет стратегию положения, то есть координированный план действий между различными частями его тела, участвующими в деятельности, с целью удержания и восстановления эффективного положения тела.
Кроме того, при работе вес тела человека и усилия движений, которые он предпринимает, суммируются с периферическими опорными средствами, другими словами, на периферии платформы в относительно протяженной зоне, где, например, могут быть предусмотрены предпочтительно несколько точек опоры, в то время как соответствующие средства удержания жестко установлены на шасси без дополнительного подвижного компонента между платформой и шасси. Надежность и жесткость устройства являются значительными. Более того, так как периферия платформы выдерживает значительные усилия, приводные средства предпочтительно предусмотрены для производства и передачи главным образом, и даже, исключительно, двигательных усилий перемещения платформы. Необходимая движущая сила невелика, что вызывается малым размером приводных средств платформы.
Другие характеристики этого устройства, взятые отдельно или в соответствии с другими возможными техническими комбинациями, заявлены в пунктах 2-15 формулы изобретения.
Предпочтительно, устройство для восстановления двигательной активности, описанное выше, отличается тем, что регулируют комбинированно или раздельно одновременно и амплитуду эксцентрикового движения платформы относительно фиксированной оси и скорость привода вращения платформы вокруг этой фиксированной оси.
Это основано на наличии средств управления, предназначенных для регулирования устройства надлежащим образом и входящих в состав этого устройства.
В дальнейшем изобретение поясняется нижеследующим описанием, не являющимся ограничительным, со ссылками на сопровождающие чертежи, на которых:
Фиг.1 изображает схематично вид в аксонометрии устройства по изобретению, на котором тело человека находится в процессе восстановления подвижности.
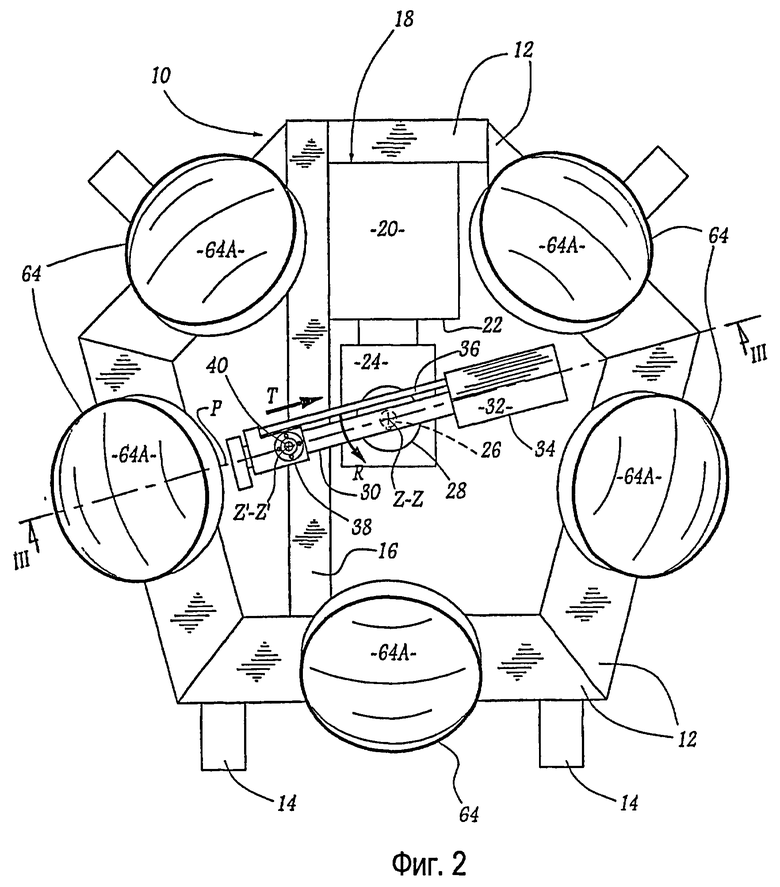
Фиг.2 изображает схематично вид сверху нижней части устройства по стрелке II фиг.1, без платформы устройства.
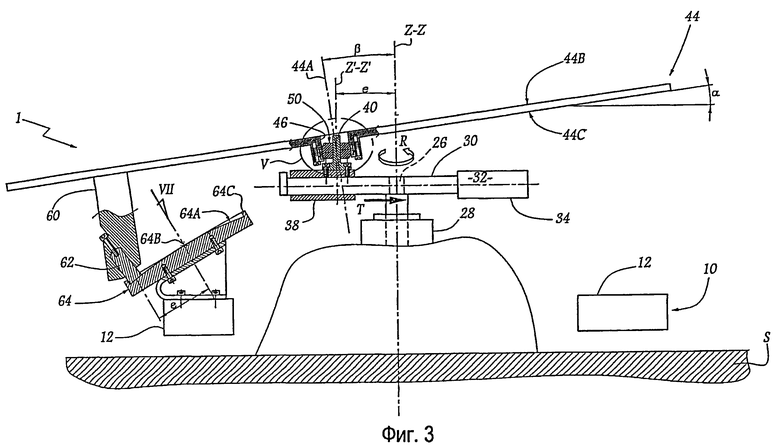
Фиг.3 схематично изображает разрез по линии III-III по фиг.2 с платформой устройства.
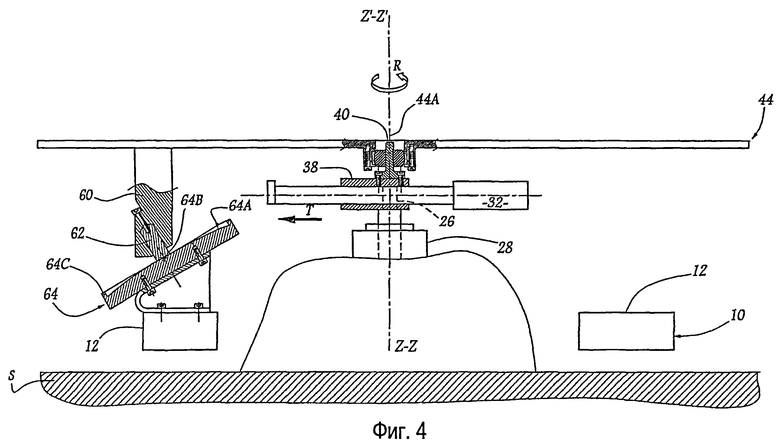
Фиг.4 изображает вид, аналогичный фиг.3, в другой конфигурации работы устройства.
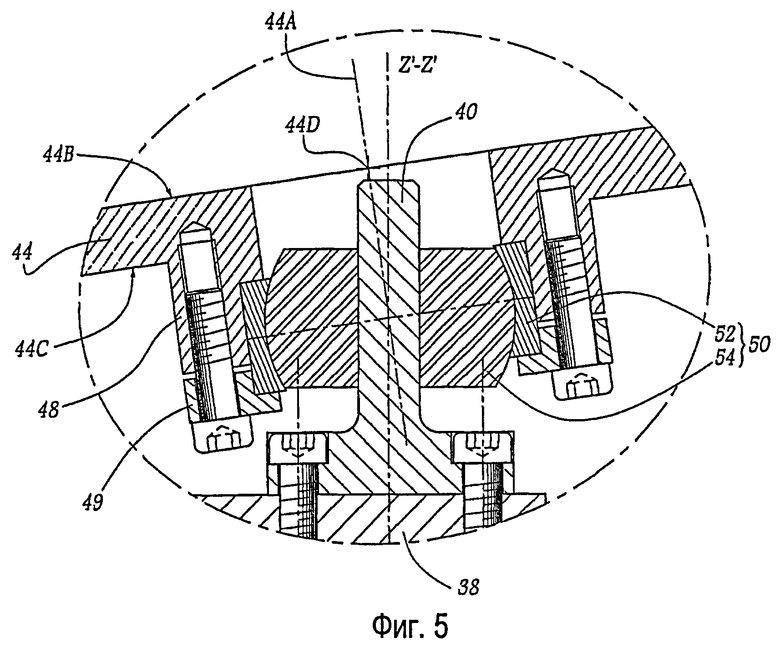
Фиг.5 изображает вид крупным планом детали V по фиг.3.
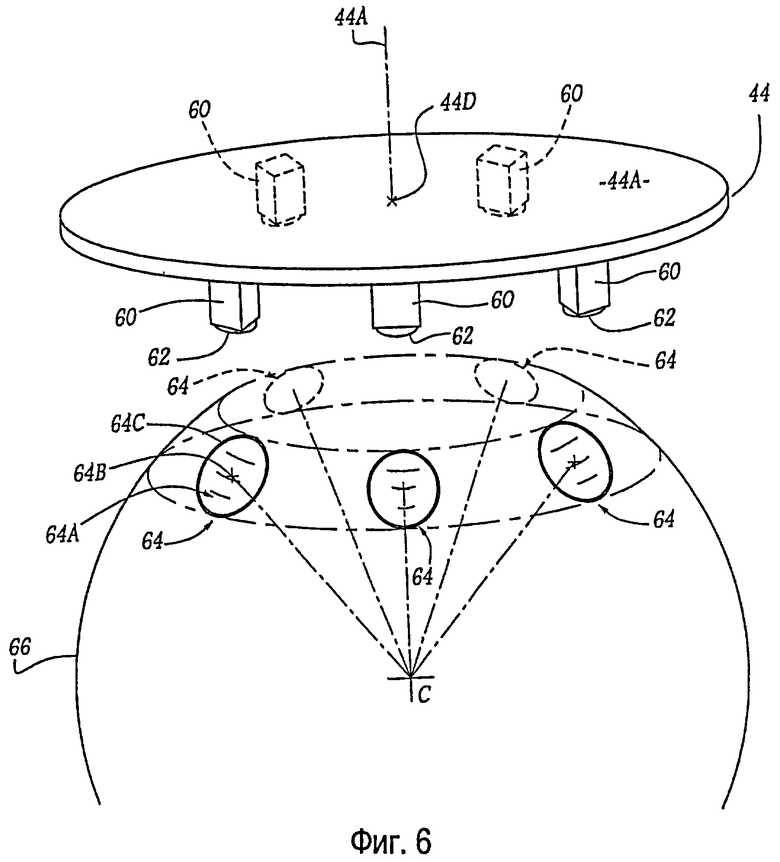
Фиг.6 изображает в аксонометрии схему платформы устройства, сочлененной с условной геометрической формой, позволяющей понять кинематику работы платформы.
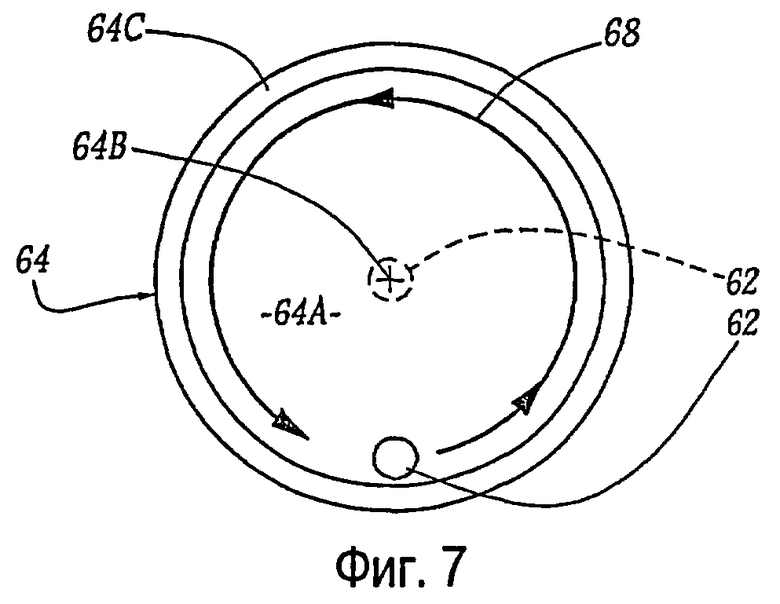
Фиг.7 изображает схематично вид в вертикальной проекции части устройства по стрелке VII, показанной на фиг.3.
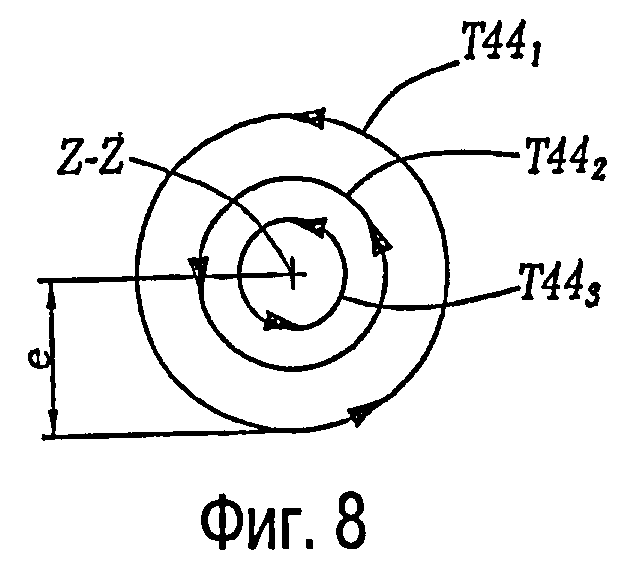
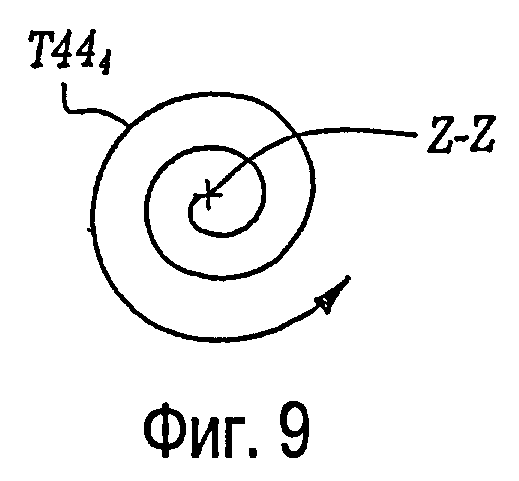
Фиг.8 и 9 изображают схемы, иллюстрирующие траектории центра платформы с той же точки наблюдения, что и на фиг.2, для различных конфигураций работы устройства.
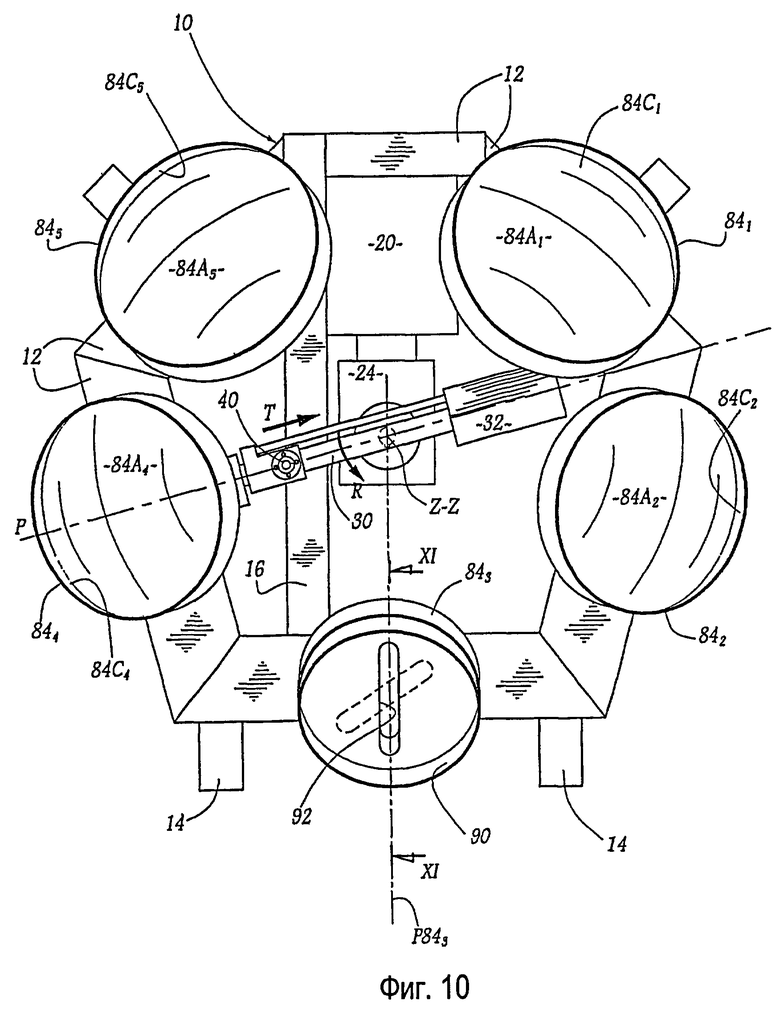
Фиг.10 изображает вид, аналогичный фиг.2, иллюстрирующий вариант осуществления устройства по изобретению.
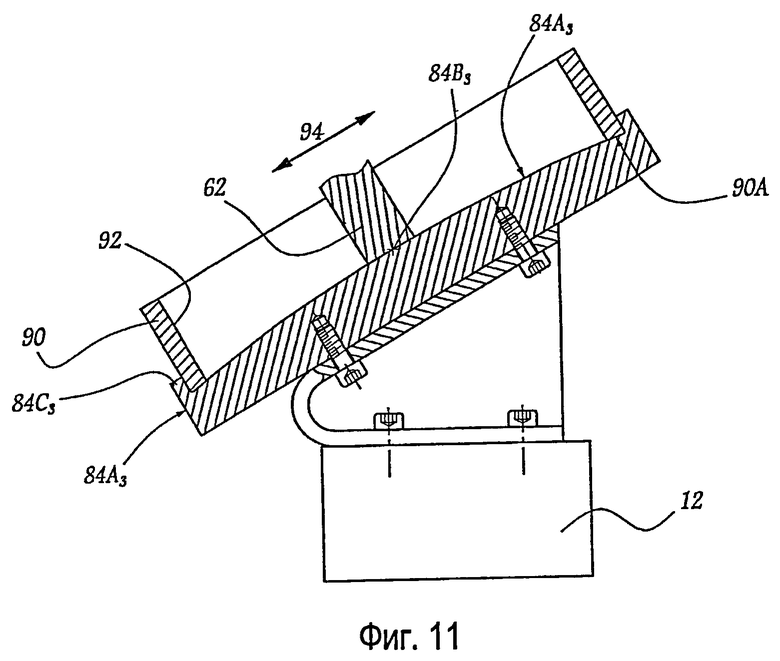
Фиг.11 изображает частичное сечение по линии XI-XI фиг.10.
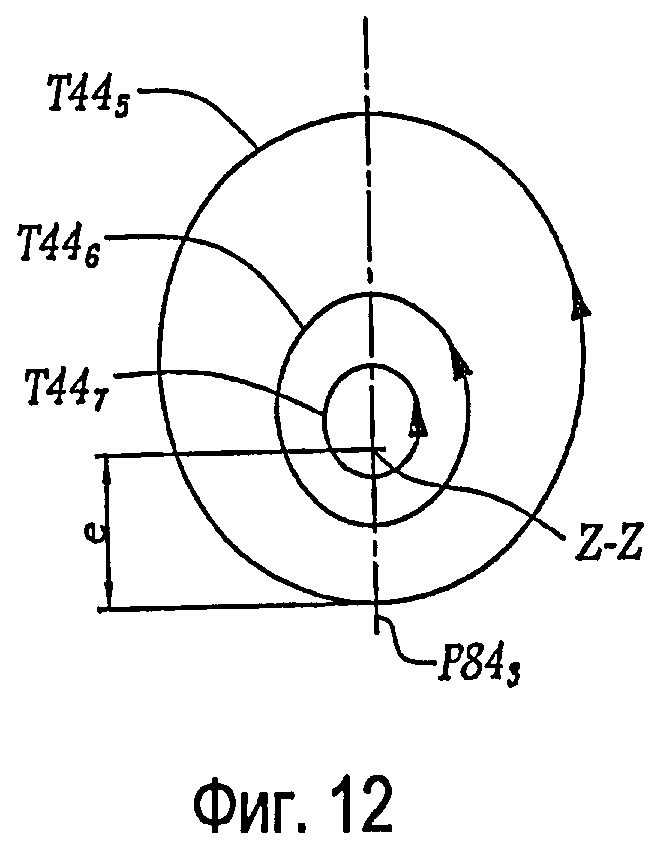
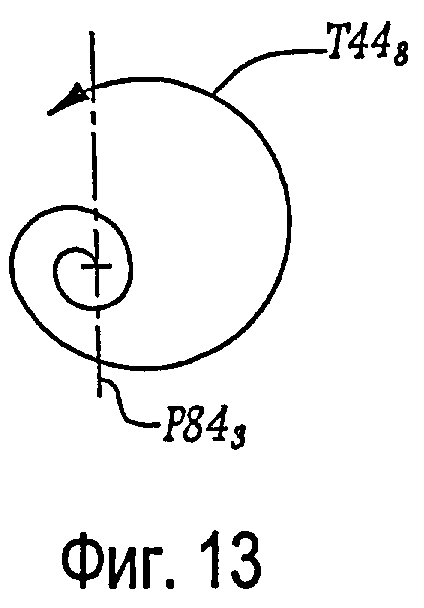
Фиг.12 и 13 изображают виды, соответственно аналогичные фиг.8 и 9, устройства по фиг.10 и 11.
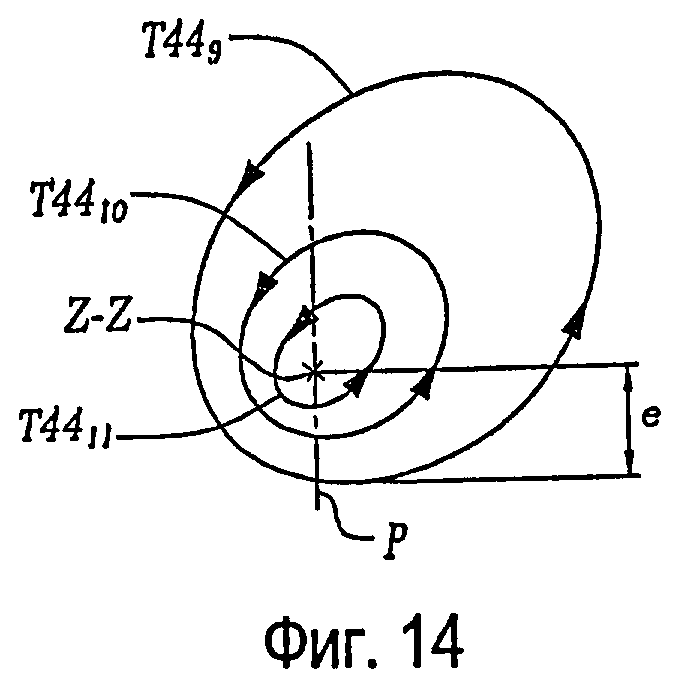
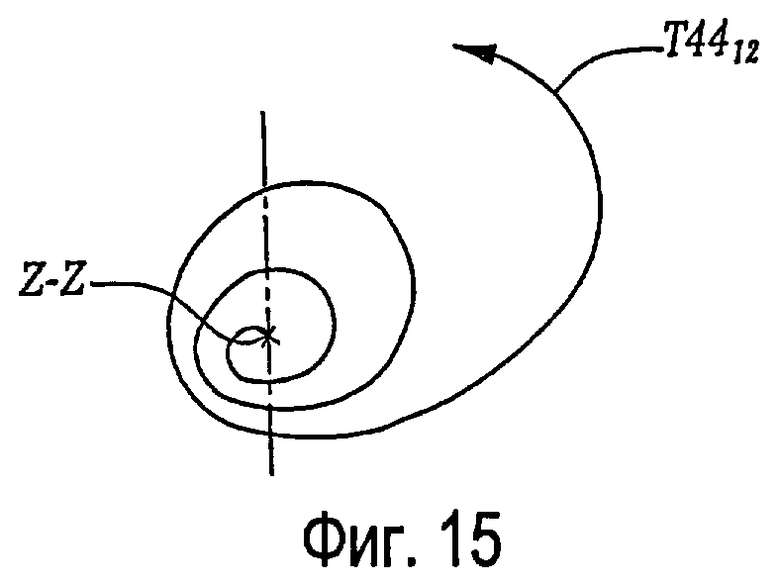
Фиг.14 и 15 изображают виды, соответственно аналогичные фиг.12 и 13, при различной настройке устройства.
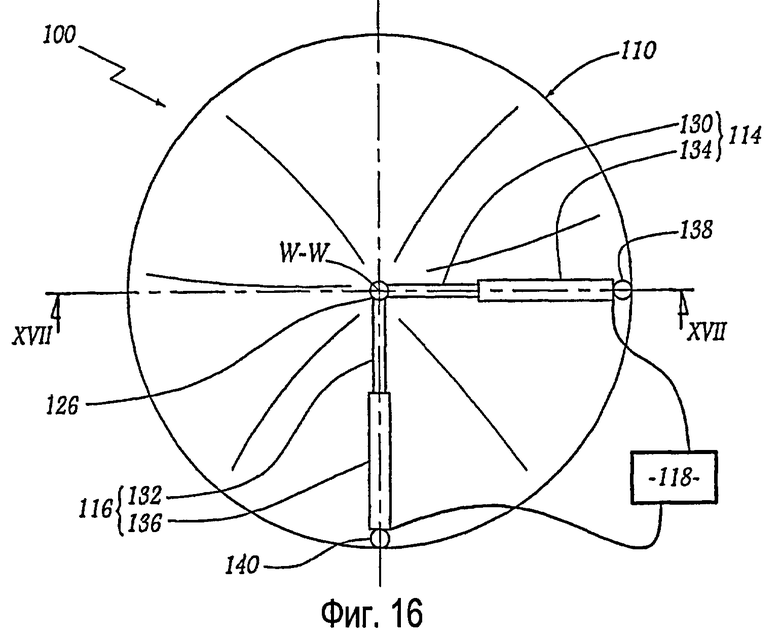
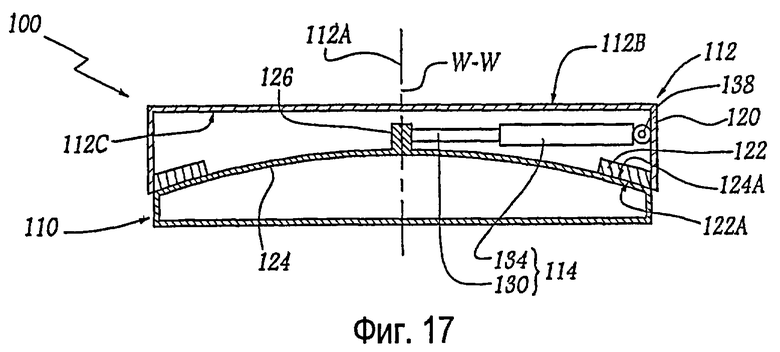
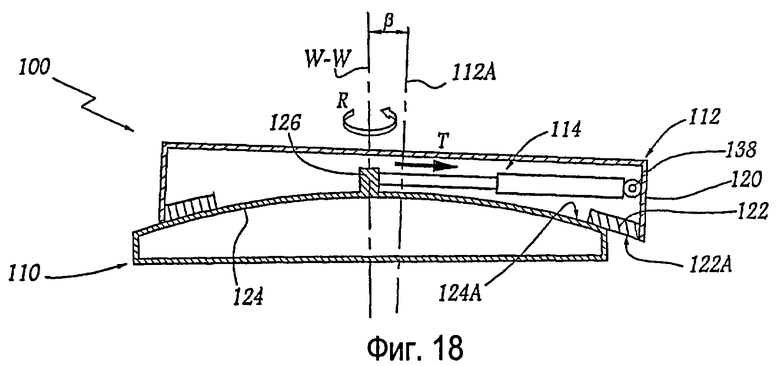
Фиг.16-18 изображают схемы, иллюстрирующие другой вариант осуществления устройства по изобретению, при этом фиг.16 соответствует виду сверху, аналогичному виду по фиг.2, в то время как фиг.17 соответствует сечению по линии XVII-XVII фиг.16, а фиг.18, аналогичная фиг.17, изображает устройство в конфигурации работы, отличной от конфигурации по фиг.17.
На фиг.1-7 изображено устройство 1 для восстановления подвижности тела человека, предназначенное для приведения в движение конечностей и суставов тела человека. Устройство 1 предназначено для использования под наблюдением кинезитерапевта или подобного медицинского работника для того, чтобы последний определял движения подвижности, придаваемые телу человека устройством. На практике устройство 1 используется в медицинском кабинете кинезитерапевта или остеопата, или, обычно, в центре медицинского обслуживания, например, в пансионате для престарелых или в учреждении талассотерапии. Как вариант, тело человека может самостоятельно использовать устройство 1, в частности, для физических упражнений, при этом устройство устанавливается, например, в фитнес-зале.
Устройство 1 содержит шасси 10, опирающееся на пол S. Для удобства понимания, в дальнейшем описании ориентация определена относительно пола, таким образом, термин «вертикальный» означает направление, по существу перпендикулярное полу S, в то время как термин «горизонтальный» означает направление, перпендикулярное определенному как вертикальное. Кроме того, термины «низ» и «нижний» означают направление к полу, в то время как термины «верх» и «верхний» указывают на противоположное направление.
Шасси 10 содержит, в основном, трубчатую структуру, которая, как на виде сверху на фиг.2 имеет обычно шестиугольную форму с шестью элементарными прямолинейными стойками 12, размещенными в одной плоскости. Эти стойки опираются на пол ножками 14, распределенными по периферии шасси. На свободном конце каждая из ножек 14, предпочтительно, снабжена регулировочным винтом 15 (фиг.1), позволяющим установить шасси 10 с учетом неровностей пола S таким образом, чтобы стойки 12, насколько это возможно, находились в горизонтальной плоскости. Две из стоек 12, размещенных одна напротив другой, жестко связаны горизонтальной траверсой 16, вдоль которой расположена моторная группа 18. Эта группа 18 содержит, с одной стороны, электродвигатель 20, внешний корпус которого 22 жестко закреплен на траверсе 16, и, с другой стороны, моторедукторную ступень 24, установленную на выходе двигателя 20, выходной вал которого 26 размещен вертикально в центральной зоне шестиугольной формы стоек 12. При управлении группой 18 вал 26 предназначен для вращения вокруг оси Z-Z, как показано стрелкой R. Устройство 1 содержит не изображенное на чертеже средство электропитания и регулируемого управления двигателем 20.
Своим верхним свободным концом вал 26 жестко соединен с горизонтальной прямолинейной штангой 30. Верхний конец вала 26 насажен или ввинчен в соответствующее отверстие в штанге 30 таким образом, чтобы вал и штанга были кинематически связаны между собой. Другими словами, когда вал 26 вращается вокруг своей оси Z-Z, штанга 30 также вращается вокруг той же оси в соответствии с вращательным движением R.
Штанга 30 размещена с обеих сторон вала 26. На одном из своих продольных концов штанга 30 несет электродвигатель 32, внешний корпус которого 34 закреплен на штанге 30 и выходной вал 36 которого воздействует на каретку 38, установленную с возможностью перемещения вдоль штанги 30. Двигатель 32 питается от двигателя 20 через коллектор 28, размещенный вокруг вала 26 и позволяющий осуществлять электрические соединения между неподвижными контактами группами 18 и вращающимися контактами двигателя 32. Благодаря циркулирующему таким образом электрическому току от двигателя 20 через коллектор к двигателю 32 штанга 30 вращается вокруг оси Z-Z.
Устройство 1 содержит также не представленное на чертеже средство управления двигателем 32.
Каретка 38 под действием выходного вала 36 двигателя 32 перемещается в горизонтальном направлении Т вдоль штанги 30, которая служит, таким образом, направляющей между двумя крайними положениями, соответственно представленными на фиг.3 и 4. Вдоль штанги 30, предпочтительно, предусмотрены детекторы окончания хода, соединенные со средством управления двигателем 32.
Каретка 38 несет прямолинейный вертикальный стержень 40, нижняя часть которого жестко закреплена в каретке. Ось Z'-Z' этого стержня 40 размещена параллельно оси Z-Z вала 26 и установлена с возможностью горизонтального перемещения Т. В крайнем положении, изображенном на фиг.3, каретка 38 позиционирует ось Z'-Z' на расстоянии от оси Z-Z с горизонтальным эксцентриковым смещением, обозначенным е на фиг.3. В крайнем положении на фиг.4 каретка 38 размещена вертикально над валом 26 таким образом, что оси Z-Z и Z'-Z' вертикально являются продолжением одна другой. Между этими двумя крайними положениями смещение оси Z'-Z' относительно оси Z-Z является изменяемым в зависимости от положения каретки 38 вдоль направляющей штанги 30 под управлением двигателя 32 между максимальным значением, соответствующим упомянутому смещению е для положения каретки по фиг.3, и нулевым значением для положения каретки по фиг.4.
При работе, когда вал 26 вращается вокруг своей оси Z-Z, стержень 40 приводится во вращение вокруг этой оси Z-Z, находясь или в смещенном положении относительно этой оси, когда смещение оси Z'-Z' не является нулевым, или в вертикальном продолжении вала 26, когда это смещение является нулевым. В последнем случае стержень 40 вращается, таким образом, вокруг самого себя, то есть вокруг собственной оси Z'-Z', совмещенной с осью Z-Z.
Устройство 1 для восстановления подвижности содержит, кроме того, платформу 44, имеющую, в общем, дисковую форму с центральной осью вращения 44А, а также по существу верхние 44В и нижние 44С поверхности.
В своей центральной части платформа 44 имеет отверстие 46 с центром на оси 44А, открывающееся на внутреннюю поверхность 44С и окруженное кольцевым фланцем 48, выполненным из того же материала, что и остальная часть платформы 44.
Платформа 44 выполнена с возможностью соединения с кареткой 38 путем введения снизу стержня 40 в отверстие 46 с помощью шарового шарнира 50, детально изображенного на фиг.5. Этот шаровой шарнир 50 содержит, с одной стороны, внешний корпус 52, жестко закрепленный во фланце 48 посредством закрепляемой болтами крышки 49, и, с другой стороны, внутреннее тело 54, имеющее внутреннюю расточку с поперечным сечением, дополнительным к поперечному сечению стержня 40. Внутреннее тело и внешний корпус перемещаются относительно друг друга известным образом путем взаимодействия соответствующих полусферических поверхностей, обеспечивающих внутреннему телу свободное перемещение во всех направлениях относительно внешнего корпуса с максимально возможными отклонениями. Таким образом, когда платформа 44 размещена на стержне 40, эта платформа может свободно качаться вокруг внутреннего тела 54 шарового шарнира 50.
По своей внешней периферии платформа 44 снабжена пятью опорами 60, выступающими вниз относительно ее нижней поверхности 44С, как схематично представлено на фиг.6. Опоры 60 предназначены для того, чтобы опираться на шасси 10, когда платформа размещена вокруг стержня 40 таким образом, чтобы вес платформы, предпочтительно, и даже исключительно, передавался на шасси через опоры 60, при этом нижняя поверхность шарового шарнира 50 не опиралась бы ни на один из элементов, размещенных под центральной зоной платформы, в частности каретку 38.
Каждая опора 60 размещена в направлении, параллельном оси 44А, и содержит на своем нижнем конце скользящий башмак 62, жестко закрепленный на опоре, например, насаживанием или привинчиванием. Каждый башмак 62 предназначен для опоры на дисковый элемент 64, жестко соединенный с шасси 10. Как показано на фиг.2, предусмотрены пять дисковых элементов 64, соответственно в области шести стоек 12 шасси, и по существу равномерно распределенных по периферии стоек.
Каждый дисковый элемент 64 имеет верхнюю выпуклую поверхность 64А, на которую скользящим образом опирается башмак 62, при этом на поверхность 64А предпочтительно наносится смазывающее вещество. Эта поверхность 64А соответствует части воображаемой сферы 66, представленной схематично на фиг.6. Эта сфера 66, общая для всех поверхностей 64А дисковых элементов 64, имеет центр С, через который проходит ось Z-Z, в то время как каждая часть поверхности 64А размещена вокруг центральной оси, соответствующей сфере 66, и имеет внешний кольцевой контур с центром на этой оси, как представлено на фиг.7.
Когда платформа 44 размещена вокруг стержня 40, башмаки 62 подвижно опираются на поверхности 64А дисковых элементов 64, как изображено на фиг.3 и 4 и как схематично представлено в схеме устройства на фиг.6. Когда каждый из башмаков 62 размещен по существу в центре 64В соответствующей поверхности 64А, как изображено на фиг.4 и как схематично представлено штриховой линией на фиг.7, платформа 44 размещается горизонтально с центром по оси Z-Z, как схематично изображено на фиг.6. Соединение платформы 44 со стержнем 40 представляется возможным, только если этот стержень размещается коаксиально оси Z-Z c кареткой 38 в ее положении по фиг.4.
Благодаря скольжению по поверхностям 64А, башмаки 62 свободно перемещаются вокруг центра С воображаемой сферы 66. Перемещения каждого башмака ограничены поперечным размером поверхности 64А, окруженным выступающим бордюром 64С.
Понятно, что платформа 64 перемещается целиком относительно дисковых элементов 64 таким образом, что когда один из башмаков 62 занимает крайнее нижнее положение относительно его соответствующей поверхности 64А, как изображено на фиг.3 и как схематично показано непрерывной линией на фиг.7, другие башмаки занимают напротив их соответствующих поверхностей 64А промежуточные положения между этим крайним нижним положением и крайним верхним положением, диаметрально противоположным крайнему нижнему положению относительно центра 64В поверхности 64А. Платформа 44, таким образом, наклонена относительно горизонтальной плоскости, то есть ее ось 44А образует не равный нулю угол β с вертикалью, в то время как ее центральное отверстие 46 размещено радиально со смещением оси Z-Z. Когда платформа 44 расположена вокруг стержня 40, такой ее наклон возможен только тогда, когда стержень 40 смещен относительно оси Z-Z, как на фиг.3. На практике радиальное расстояние между центром 64В поверхности 64А и башмаком 62 в крайнем нижнем положении по существу соответствует упомянутому значению е.
Так, когда платформа 44 расположена вокруг стержня 40, понятно, что привод каретки 38 в горизонтальном направлении Т вызывает перемещение платформы 44 между ее горизонтальным положением по фиг.4 и ее наклонным положением по фиг.3, благодаря скользящей опоре башмаков 62 на поверхности 64 А элементов 64, при этом наклон платформы относительно стержня 40 обеспечивается шаровым шарниром 50.
Пример использования устройства 1 будет описан ниже.
Вначале рассматривают, что платформа 44 занимает горизонтальное положение на фиг.4. Тело человека 2 легко поднимается на платформу 44, ставя ноги на верхнюю поверхность 44В платформы, как представлено на фиг.1. В этом положении, если двигатель 20 включен, ось 26 вращается вокруг самой себя по оси Z-Z и посредством штанги 30 это движение вращения передается на стержень 40, который также вращается вокруг своей оси. Внутреннее тело 54 свободно вращается во внешнем корпусе 52 и платформа 44 остается неподвижной относительно шасси 10.
Теперь рассмотрим ситуацию, когда двигатель 20 остановлен, а двигатель 32 включен, при этом каретка 38 перемещается горизонтально по направлению Т. Платформа 44 приводится, таким образом, в соответствующее поступательное движение. Так как эта платформа опирается башмаками 62 на поверхности 64А дисковых элементов 64, это движение перемещения вызывает наклон платформы таким образом, что он образует не нулевой угол α с горизонталью в плоскости фиг.3, то есть в вертикальной плоскости Р, проходящей одновременно через оси Z-Z и Z'-Z'. В максимуме этот наклон может быть установлен так, что один из башмаков 62 упрется в периферический бордюр 64С соответствующего дискового элемента 64. В этой наклонной конфигурации последующее включение двигателя 20 при остановке двигателя 32 вызывает эксцентриковое вращение оси Z'-Z' вокруг оси Z-Z таким образом, что плоскость Р, в которой расположены оси Z-Z и Z'-Z', вращается вокруг оси Z-Z в соответствии с движением вращения R. Это означает, что ось 44А платформы 44 вращается одинаково вокруг оси Z-Z, следуя вращению R, так что в конце одного оборота оси 26 вокруг самой себя эта ось 44 А описывает по существу коническую поверхность, ось Z-Z и полуугол при вершине β, который соответствует наклону α платформы 44 в плоскости Р. На виде сверху по вертикали центр 44Д платформы, определяемый пересечением оси 44А и поверхности 44В, описывает кольцевую траекторию Т441 с центром на оси Z-Z и радиусом, по существу равным е, как изображено на фиг.8. В то же время башмаки 62 скользят по поверхностям 64А своего соответствующего дискового элемента 64, следуя по по существу кольцевой траектории, с центром в центре 64В этой поверхности, как показано позицией 68 на фиг.7.
Когда наклон не отрегулирован до своего максимума, то приходится говорить, что каретка 38 смещена на ненулевую величину, меньшую е, и центр 44D платформы 44 описывает кольцевую траекторию с центром на оси Z-Z и радиусом, меньшим е. Два примера таких промежуточных траекторий, обозначенных позициями Т442 и Т443, изображены на фиг.8.
Если в процессе вращения R, осуществляемого двигателем 20, смещение между осями Z-Z и Z'-Z' изменено путем перемещения каретки 38 вдоль штанги скольжения 30, движение платформы 44 уходит от базовой кинематики, описанной выше, и выбирает более совершенную кинематику, которая сразу же приближается к базовой кинематике. Например, если вращательное движение R поддерживается с постоянной интенсивностью и если оно совмещается с поступательным перемещением Т, центр 44D платформы описывает на виде сверху траекторию Т444 в форме спирали с центром на оси Z-Z, как изображено на фиг.9.
Таким образом, понятно, что, когда смещение между осями Z-Z и Z'-Z' не является нулевым, как на фиг.3, вращательное движение R двигателя воздействует на платформу 44 таким образом, что она описывает эксцентрическую кривую вокруг оси Z-Z, будучи наклоненной относительно горизонтальной плоскости, при этом наклон α платформы является более заметным в плоскости Р, в которой находятся оси Z-Z и Z'-Z'. У тела человека, находящегося на платформе 44, нарушается равновесие, и на него воздействует центробежная сила: ось тела человека, в общем, соответствует оси 44А так, что вертикальная проекция центра тяжести тела человека сразу же смещается относительно оси Z-Z, отстоящей от центра опорного полигона тела человека, в то время как этот полигон приводится в движение платформой. В зависимости от регулирования наклона α платформы нарушение равновесия тела человека увеличивается более или менее, заставляя последнего перемещать свое тело соответствующим образом, чтобы не упасть. На практике устройство 1 сочленено с неподвижными поручнями 70, жестко соединенными с шасси 10 для того, чтобы тело человека могло держаться, чтобы исключить полную потерю равновесия. Эти поручни 70 схематично и единственно представлены на фиг.1, учитывая, что возможны различные формы средств, позволяющие телу человека удерживаться на движущейся платформе.
Управление устройством 1 осуществляется кинезитерапевтом или, в общем случае, медицинским работником, который управляет скоростью вращения двигателя 20, наклоном α платформы 44, регулируя положение каретки 38 вдоль штанги скольжения 30 путем управления двигателем 32, а также, при необходимости, включением двигателя 32 при вращающемся двигателе 20, что приводит к комбинации вращательных движений R и горизонтального перемещения Т. В случае, когда устройство 1 предназначено для автономного использования телом человека, средства управления, предпочтительно, встроены в поручни 70 таким образом, чтобы тело человека могло изменять кинематику привода платформы 44 в процессе своего упражнения. При этом при использовании устройства 1 в фитнес-зале следует отметить, что при функционировании все мускулы тела человека быстро и интенсивно набирают силу, что сопровождается комбинированным сжиганием жиров и координированными мускульными и суставными упражнениями на гибкость.
Во всех этих случаях команды управления двигателями 20 и 32 могут быть заданы заранее, будучи, в частности, сохраненными в средствах памяти, соединенных с упомянутыми средствами управления.
Фиг.10 и 11 относятся к варианту осуществления устройства 1. Этот вариант отличается от устройства 1 на фиг.9 только элементами опоры платформы 44, которые заменяют описанные ранее элементы 64. Точнее говоря, элементы 64 заменены пятью элементами 841-845, распределенными по периферии шасси 10 таким же образом, как и элементы 64. Элемент 843 идентичен соответствующему элементу 64, в то время как другие элементы 841, 842, 844 и 845 соответствуют каждый элементу 64, но с большим поперечным размером: два элемента 842 и 844, наиболее близкие к элементу 843, имеют также радиальный размер относительно их центральной оси, примерно в полтора раза превышающий соответствующий размер элементов 64, в то время как элементы 841 и 845, наиболее удаленные от элемента 843, имеют радиальный размер, примерно в два раза превышающий соответствующий размер элементов 64.
Без учета радиального размера, структурные характеристики элементов 841 и 845 аналогичны характеристикам элементов 64: каждый из элементов 841-845 имеют верхнюю выпуклую поверхность 84А1-84А5, которая соответствует части воображаемой сферы 66 и которая окружена выступающим периферийным бордюром 84С1-84С5.
Вариант осуществления на фиг.10 и 11 содержит, впрочем, дополнительный компонент, а именно направляющую пластину 90, закрепленную неподвижно не представленными на чертеже средствами соединения на каком либо из элементов 841-845, в представленном примере на элементе 843, закрывая его поверхность 84А3 крышкой. Эта пластина имеет общую дисковую форму с размерами для размещения ее внутри бордюра 84С3 с нижней поверхностью 92А, дополнительной к поверхности 84А3, как изображено на фиг.11. Пластина 90 по одному из своих диаметров имеет паз 92, пересекающий пластину с одной стороны до другой по толщине и открывающийся на поверхность 84А3, когда пластина соединена с элементом 843. В собранном состоянии на фиг.10 продольное направление этого паза соответствует вертикальной плоскости Р843, в которой находится ось Z-Z и центр 84В3 элемента 843, при этом эта плоскость соответствует плоскости фиг.11. Паз 92 предназначен для приема башмака 62 опоры 60 элемента 843, при этом ширина паза по существу равна соответствующему размеру башмака. Вибрации или небольшие перемещения платформы 44 относительно шасси 10 таким образом ограничиваются, придавая платформе большую стабильность для тела человека, находящегося на этой платформе. Более того, когда башмак 62 находится в пазу 92, этот башмак перемещается относительно элемента 843 только вдоль паза 92, другими словами, следует по прямолинейной траектории 94, находящейся в плоскости Р843 фиг.11. В этих условиях паз 92 мешает соответствующему башмаку 62 описывать кольцевую траекторию у плоскости 84А3 аналогично траектории 68 по фиг.7, что нарушает движение комплекса платформы 44. При работе, когда платформа 44 приводится в эксцентриковое вращение вокруг оси Z-Z, она отходит от положения, которое занимала бы при отсутствии пластины 90, приспосабливая ее невозможность к перемещению с обеих сторон плоскости Р843 к уровню элемента 843 путем более значительных перемещений в области других элементов, в частности в области элементов 841 и 845. Когда смещение платформы является максимальным (значение е), центр 44D платформы описывает траекторию Т445, представленную на фиг.12, то есть траекторию с центром вокруг оси Z-Z и имеющую более широко искривленную форму со стороны элементов 841 и 845. В области периферических частей платформы на одной линии с элементами 841 и 845 амплитуда перемещения платформы является двойной по сравнению с амплитудой в области периферической части платформы на одной линии с элементом 843, что объясняет размеры элементов 841-845. На фиг.12 также представлены промежуточные траектории Т446 и Т447, аналогичные траекториям Т442 и Т443, представленным на фиг.8, то есть для значений отклонения, меньших значения е. Кроме того, на фиг.13 представлена траектория Т448, получаемая в тех же условиях работы, что и для траектории Т444 по фиг.9, то есть при комбинации вращательного эксцентрического вращения R и горизонтального перемещения Т.
Благодаря этому варианту реализации устройство 1 обеспечивает более развитую кинематику восстановления подвижности тела, чем кинематика устройства на фиг.1-9, вызывающая различные биомеханические реакции тела человека в соответствии с тем, что последний размещается в центральной зоне платформы, в периферической зоне, отклоняющейся по вертикали от элемента 843, или в противолежащей периферической зоне, отклоняющейся по вертикали от элементов 841 и 845.
Предпочтительно, угловое положение пластины 90 является регулируемым относительно дискообразного элемента 843 таким образом, чтобы положение паза 90 могло быть изменено в направлении траектории 94 относительно плоскости Р843. В конфигурации паза 92, представленного штриховой линией на фиг.10, траектория 94 образует угол примерно в 45° с плоскостью Р843 на виде сверху по вертикали. В соответствии с правилами тренировки устройства 1 центр 44D платформы 44 описывает траектории с Т449 по Т4412, представленных на фиг.14 и 15, соответствующих траекториям с Т445 по Т448 фиг.12 и 13.
Изменяя направление траектории 94 относительно оси Z-Z, вызывают асимметрию перемещений платформы 44 относительно плоскости Р843, что позволяет напрячь с различной интенсивностью оба бока тела человека, находящегося на платформе.
При необходимости устройство включает не представленные на чертеже средства, заставляющие изменить траекторию 94 относительно неподвижной оси Z-Z в процессе работы устройства 1 путем вращения пластины 90 относительно поверхности 84А3.
На фиг.16-18 представлен другой вариант осуществления устройства 100 для восстановления общей подвижности человеческого тела. Как и устройство 1 на предыдущих чертежах, устройство 100 содержит, в основном, неподвижное шасси 110, подвижную платформу 112 и приводные средства платформы относительно шасси, при этом приводные средства выполнены в виде двух приводных гидроцилиндров, причем оба привода связаны с одним блоком 118 управления и регулирования.
Платформа 112 имеет центральную ось вращения 112А и ограничена, с одной стороны, верхней поверхностью 112В, предназначенной для размещения тела человека и, с другой стороны, нижней поверхностью 112С, направленной к шасси 110. Платформа 112 по внешней периферии окружена бортиком 120, направленным вниз от поверхности 112С и снабженным на нижнем краю внутренним кольцом 122, предназначенным для опоры на шасси 110. Для этого шасси 110 в своей верхней части имеет выпуклую стенку 124, размещенную вокруг жесткого центрального стержня 126, продольная ось W-W которого является по существу вертикальной. Нижняя поверхность 122А кольца 122 выполнена по существу дополняющей верхнюю поверхность 124А стенки шасси 124 таким образом, что платформа 112 имеет возможность перемещения относительно шасси 110 аналогично платформе 44, перемещающейся относительно шасси 10 устройства 1 на фиг.1-7, при этом выпуклая поверхность 124А соответствует куполу воображаемой сферы 66, представленной на фиг.6.
Каждый гидроцилиндр 114, 116 содержит шток 130, 132, перемещаемый в продольном направлении относительно корпуса 134, 136 гидроцилиндра. Свободный конец каждого штока 130, 132 опирается на центральный стержень 126 шасси 110 таким образом, что выдвижение или втягивание штока относительно его корпуса 134, 136 вызывает удаление или напротив приближение этого корпуса к стержню 126. Конец каждого корпуса 134, 136, противоположный соответствующему штоку 130, 132, механически связан с бортиком 120 платформы 112 через шаровой шарнир 138, 140.
На виде сверху фиг.16 гидроцилиндры 114 и 116 размещены в длину поперечно оси W-W, проходящей через центральный стержень 126, образуя между собой угол, примерно, в 90°.
Блок 118 предназначен для управления выдвижением и втягиванием каждого штока 130, 132 относительно соответствующего корпуса 134, 136 гидроцилиндров, что вызывает перемещение платформы 112 относительно шасси 110, при этом движение корпуса гидроцилиндра передается на платформу через шаровые шарниры 138, 140.
В нерабочем положении, как изображено на фиг.16 и 17, общие длины гидроцилиндров 114 и 116 таковы, что платформа 112 размещена по существу горизонтально и ее ось 112А по существу совпадает с осью W-W. При работе, когда блок 118 управляет, например, выдвижением штока 130, корпус гидроцилиндра 134 перемещается радиально наружу относительно оси W-W, как обозначено стрелкой Т на фиг.18. Платформа 112 приводится, таким образом, в движение поступательного перемещения, объединенного с наклоном относительно горизонтали плоскости фиг.17 путем скольжения поверхности 122А по поверхности 124А. Оси W-W и 112 образуют, таким образом, не равный нулю угол β. Понятно, что аналогичное управление блоком 118 гидроцилиндром 116 вызывает аналогичные смещение и наклон платформы 112 относительно шасси 110 таким образом, что с помощью соответствующих приводных средств, в частности электронных средств, координированное управление двумя гидроцилиндрами 114 и 116 позволяет приводить платформу 112 в соответствие с кинематикой, аналогичной описанной выше кинематике платформы 44 относительно шасси 10, то есть такой, которая позволяет одновременно путем поступательного перемещения Т смещать платформу относительно оси W-W и приводить ее во вращение по стрелке R при ее смещении, причем платформа наклонена относительно горизонтали в вертикальной плоскости, проходящей через оси W-W и 112А.
Само собой разумеется, вариант осуществления на фиг.16-18 может включать признаки варианта фиг.10-15 в том смысле, что кольцо 122 может в точке своей периферии перемещаться относительно шасси 124 по прямолинейной траектории типа траектории 94. Для этого на внешней поверхности 124 стенки 124 предусмотрен прямолинейный направляющий рельс, при этом опора, аналогичная одной из опор 60 и укрепленная на нижней поверхности 122А кольца 122, установлена с возможностью перемещения по рельсу. При необходимости, положение рельса относительно стенки 124 может быть изменено для регулирования направления траектории 94 относительно неподвижной вертикальной плоскости, что позволяет описывать центру платформы 112 траекторию типа траекторий Т445-Т4412 на фиг.12-15.
Можно предусмотреть различные опции и варианты устройств для восстановления подвижности 1 и 100, описанных выше:
- для амортизации при упорах башмаков 62 в бордюр 64С их соответствующего дискового элемента 64, когда платформа 44 наклонена с максимальной амплитудой, каждый башмак 62 может быть снабжен упругой периферийной гарнитурой, например, в виде кольца, размещенного вокруг основного корпуса башмака;
- возможны другие формы осуществления крайних частей опор 60, подвижно упирающихся в дисковые элементы 64, при этом башмаки 62 могут быть заменены шарами или другими элементами качения; в частности, башмаки 62 могут быть заменены роликами, связанными, в частности, случайным образом с нижней поверхностью платформы; такие ролики имеют то преимущество, что они могут мгновенно адаптироваться к движениям без инерционного или тормозного эффекта;
- при отсутствии пластины 90 для исключения вибраций или малых перемещений платформы 44 относительно дисковых элементов, связанных с присущими устройству зазорами, может быть предусмотрено наличие амортизаторов типа, например, пневмоцилиндров, размещенных между каждой опорой 60 и шасси 10;
- если отказываются от возможности смещения между осями Z-Z и Z'-Z' в процессе вращательного движения R, вызванного моторной группой 18, двигатель 32 может быть заменен любым механическим средством, позволяющим регулировать положение каретки 38 вдоль штанги 30, такое средство управляется, в частности, вручную перед тем, как тело человека встанет на платформу 44;
- платформы 44 и 112 могут иметь другие формы, чем обычная дисковая форма, изображенная выше; эти платформы могут также иметь на виде в плане прямоугольную, овальную форму и т.д.;
- вместо того чтобы каретка 38 при движении вдоль штанги 30 скольжения, когда она находится на одной линии с осью 26, входила в упор, предусмотрено, что штанга скольжения может иметь такую длину, чтобы каретка могла перемещаться с обеих сторон оси Z-Z;
- число пар опора 60/дисковый элемент 64 может быть больше или меньше пяти; кроме того, вместо того, чтобы предусмотреть отдельные элементы, распределенные по внешней периферии устройства, средства опоры платформы на шасси и/или соответствующие средства могут иметь форму выполнения, распределенную непрерывно по периферии устройства, такую как обод 122; например, дисковые элементы 64 могут быть заменены кольцевой стенкой с центром на оси Z-Z и соответствовать части сферы 66, изображенной на фиг.6 штрихпунктирной линией;
- устройство может включать оптокинетический механизм, дающий световую точку, которую должен видеть тело человека; и/или
- над устройством может быть предусмотрена подвеска типа перекладины или шара для осуществления проприоцептивных или мышечных упражнений.
Изобретение относится к устройствам для придания общей подвижности тела человека, устройствам, обеспечивающим приведение в движение туловища, конечностей и суставов тела человека. Устройство для придания общей подвижности телу человека, содержащее шасси для неподвижной опоры на пол, платформу для размещения тела человека, перемещаемую относительно шасси, и моторные средства для приведения платформы в движение относительно шасси, характеризующееся тем, что приводные средства предназначены, с одной стороны, для смещения платформы относительно по существу вертикальной фиксированной оси (Z-Z; W-W) и, с другой стороны, для приведения платформы во вращение вокруг этой оси, когда платформа смещена, причем платформа снабжена периферийными подвижными опорными средствами на соответствующие посадочные места, жестко соединенные с шасси, причем упомянутые опорные средства предназначены для размещения платформы на шасси с регулируемым наклоном относительно горизонтали в плоскости (Р), проходящей через фиксированную ось (Z-Z; W-W) и центральную зону платформы, когда приводные средства смещают платформу относительно этой оси. Техническим результатом изобретения является усиление и тренировка нейробиомеханической компетенции тела человека. 15 з.п. ф-лы, 18 ил.
1. Устройство (1; 100) для придания общей подвижности телу человека (2), содержащее:
шасси (10; 110) для неподвижной опоры на пол (S),
платформу (44; 112) для размещения тела человека, перемещаемую относительно шасси, и
моторные средства (18, 30, 32, 38, 114, 116) для приведения платформы в движение относительно шасси, отличающееся тем, что приводные средства (18, 30, 32, 38, 114, 116) предназначены, с одной стороны, для смещения платформы относительно, по существу, вертикальной фиксированной оси (Z-Z; W-W) и, с другой стороны, для приведения платформы во вращение вокруг этой оси, когда платформа смещена, причем что платформа (44; 112) снабжена периферийными подвижными опорными средствами (60, 62, 120, 122) на соответствующие посадочные места (64; 841-845; 124), жестко соединенные с шасси 10, причем упомянутые опорные средства предназначены для размещения платформы на шасси с регулируемым наклоном относительно горизонтали в плоскости (Р), проходящей через фиксированную ось (Z-Z; W-W) и центральную зону платформы, когда приводные средства смещают платформу относительно этой оси.
2. Устройство по п.1, отличающееся тем, что периферийные опорные средства (60, 62; 120, 122) и посадочные места (64; 841-845; 124) предназначены для размещения на шасси (10; 110), по существу, горизонтально, когда ось платформы находится, по существу, на фиксированной оси (Z-Z; W-W).
3. Устройство по п.1, отличающееся тем, что посадочные места (64; 841-845; 124) имеют, по существу, сферическую покрывающую поверхность (66) с центром на фиксированной оси (Z-Z; W-W) и, по меньшей мере, на часть которой подвижно опираются опорные средства (60, 62, 122).
4. Устройство по п.3, отличающееся тем, что посадочные места содержат множество отдельных друг от друга посадочных элементов (64; 841-845), по существу, равномерно распределенных по периферии шасси (10), каждый из которых ограничивает часть (64А; 84А1-84А5) покрывающей поверхности (66).
5. Устройство по п.1, отличающееся тем, что опорные средства (60, 62) содержат множество отдельных друг от друга опорных элементов (62), по существу, равномерно распределенных по периферии платформы (44) и соответственно предназначенных для локальной опоры на посадочные элементы (64).
6. Устройство по п.1, отличающееся тем, что оно содержит средство (90) направления опорных средств (60, 62) относительно посадочных средств (841-845), при этом средства направления предназначены для придания опорным средствам, по существу, прямолинейной траектории (94) только на уровне одной периферийной части платформы (44).
7. Устройство по п.6, отличающееся тем, что опорные средства (60, 62) содержат множество отдельных друг от друга опорных элементов (62), по существу, равномерно распределенных по периферии платформы (44) и предназначенных соответственно для локальной опоры на посадочные элементы (64), причем средство (90) направления содержат паз (92) для приема одного из опорных элементов (62), предназначенного для направления этого элемента, по существу, по прямолинейной траектории (94).
8. Устройство по п.6, отличающееся тем, что средство (90) направления является регулируемым для изменения направления, по существу, прямолинейной траектории (94) относительно фиксированной оси (Z-Z).
9. Устройство по п.1, отличающееся тем, что платформа (44; 112) снабжена, средствами (50, 138, 140) шарнирной связи с приводными средствами (18, 30, 32, 38, 114, 116), предназначенными для эксцентрикового привода вокруг фиксированной оси (Z-Z; W-W).
10. Устройство по п.9, отличающееся тем, что средства шарнирной связи (50) размещены на уровне центральной зоны платформы (44).
11. Устройство по п.9, отличающееся тем, что средства шарнирной связи содержат, по меньшей мере, один шаровой шарнир (50, 138, 140), на котором шарнирно свободно перемещается платформа (44).
12. Устройство по п.1, отличающееся тем, что приводные средства содержат вращающийся вал (26), продольная ось которого образует фиксированную ось (Z-Z).
13. Устройство по п.12, отличающееся тем, что приводные средства содержат, кроме того, направляющую (30) для смещения платформы (44) относительно фиксированной оси (Z-Z), причем упомянутая направляющая размещена поперечно вращающемуся валу (26) и кинематически с ним связана.
14. Устройство по п.13, отличающееся тем, что платформа (44; 112) снабжена средствами (50, 138, 140) шарнирной связи с приводными средствами (18, 30, 32, 38, 114, 116), предназначенными для эксцентрикового привода вокруг фиксированной оси (Z-Z; W-W), причем средства связи (50) размещены на каретке (38), установленной с возможностью поступательного перемещения (Т) вдоль направляющей (30) и управления при перемещении двигателем (32), размещенным на направляющей.
15. Устройство по п.9, отличающееся тем, что приводные средства содержат первый электродвигатель (20), корпус (22) которого закреплен на шасси (10) и выходной вал которого кинематически связан с вращающимся валом (26), второй электродвигатель (32), корпус (34) которого кинематически связан с вращающимся валом и который предназначен для управления смещением платформы (44), а также коллектор (28) для передачи электрического тока от первого ко второму двигателю.
16. Устройство (1) по пп.1-15, отличающееся тем, что дополнительно содержит средства управления, выполненные с возможностью регулировать раздельно или совместно одновременно и амплитуду эксцентрикового смещения платформы (44; 112) относительно фиксированной оси (Z-Z; W-W), и скорость привода во вращение платформы вокруг этой фиксированной оси.
| US 6176817 В1, 23.01.2001 | |||
| US 6428451 В1, 06.08.2002 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| КОММУТАТОР С ИМПУЛЬСНЫМ УПРАВЛЕНИЕМ | 0 |
|
SU210253A1 |

