Изобретение относится к машиностроению, в частности к робототехнике, а именно к пространственным манипуляционным механизмам роботов с шестью степенями свободы с кинематической развязкой поступательных и вращательных движений.
Известно устройство робототехническая технологическая установка (патент РФ RU 2063329 С1, авторы Крайнев А.Ф., Афонин В.Л, Глазунов В.А., Ковалев В.Е., опубл. 10.07.96, Бюл. №19), содержащее основание, размещенные на нем модули для установки инструмента и установки обрабатываемой детали, выполненные в виде механизмов параллельной структуры, содержащих выходное звено и кинематические цепи, включающие вращательный двигатель, установленный на основании, промежуточную вращательную пару, и шарнир, сопряженный с выходным звеном.
Недостатком данного устройства является сложность конструкции ввиду того, что все кинематические цепи имеют разную структуру. Это обусловливает сложность проектирования и управления.
За прототип взято устройство (статья 2007 г. Глазунов В.А., Ласточкин А.Б., Терехова А.Н., Bу Нгок Бик. «Об особенностях устройств относительного манипулирования» («Проблемы машиностроения и надежности машин», 2007, №2, рис.5). Робототехническая технологическая установка, содержащая основание, размещенные на нем модуль для установки инструмента и модуль для установки обрабатываемой детали, выполненные в виде механизмов параллельной структуры, содержащих выходное звено и три кинематические цепи, включающие вращательный двигатель, установленный на основании, промежуточную вращательную пару и шарнир, сопряженный с выходным звеном, причем шарнир, сопряженный с выходным звеном модуля для установки инструмента, выполнен в виде сферической кинематической пары. Недостатком данного устройства является то, что в каждой кинематической цепи модуля для установки обрабатываемой детали расположены цилиндрические кинематические пары, требующие большой точности в сборке модуля и более склонные к заклиниваниям, чем сферические пары, а также отсутствие унификации механизмов двух модулей.
Технический результат - устранение отмеченных недостатков и повышение технической и эксплуатационной эффективности устройств манипулирования в пространстве по шести координатам на базе кинематической развязки поступательных и вращательных движений, выполняемой при помощи разделения числа степеней свободы между двумя модулями.
Технический результат достигается тем, что в известном устройстве - пространственном механизме, содержащем основание, размещенные на нем модуль для установки инструмента и модуль для установки обрабатываемой детали, выполненные в виде механизмов параллельной структуры, содержащих выходное звено и кинематические цепи, включающие вращательный двигатель, установленный на основании, промежуточную вращательную пару и шарнир, сопряженный с выходным звеном, новым является то, что все вращательные двигатели размещены на основании, выполненном в виде единой пространственной конструкции, состоящей из трех стоек и двух горизонтальных траверс, по одной на каждый из модулей, траверсы выполнены в виде шестиугольников, с тремя прямыми углами в местах соединения со стойками, а шарнир, сопряженный с выходным звеном модуля для установки обрабатываемой детали, выполнен в виде сферической кинематической пары
Описание устройства - робототехнической технологической установки - представлено на чертеже.
Устройство - робототехническая технологическая установка - включает основание 1, выходное звено модуля установки инструмента 2, выходное звено модуля установки детали 2'. Каждое выходное звено связано с установленными на основании тремя вращательными двигателями 3 и 3' соответственно тремя соединительными кинематическими цепями, каждая из которых содержит промежуточную вращательную пару 4, 4' и шарнир в виде сферической кинематической пары 5 и 5', сопряженный с выходным звеном 2, 2', все вращательные двигатели размещены на основании, выполненном в виде единой пространственной конструкции, состоящей из трех стоек 6, 6' 6" и двух горизонтальных траверс 7, 7', по одной на каждый из модулей, траверсы выполнены в виде шестиугольников, с тремя прямыми углами в местах соединения со стойками.
Устройство - робототехническая технологическая установка - работает следующим образом. Относительно основания 1 выходное звено модуля установки детали 2 и модуля установки инструмента 2' перемещается по трем координатам каждое посредством трех соединительных кинематических цепей, при действии двигателей вращательного движения 3, 3' через шарниры 4, 4' и 5, 5', движение передается выходным звеньям 2, 2' соответственно.
Кинематическая развязка осуществляется следующим образом. Поскольку оба модуля установлены на горизонтально расположенных траверсах 7, 7', а кинематические пары расположены так, что модуль для установки инструмента может перемещаться по вертикальной оси и вращаться вокруг двух горизонтальных осей, а модуль для установки обрабатываемой детали может вращаться вокруг вертикальной оси и перемещаться вдоль двух горизонтальных осей, то тем самым степени свободы распределены между модулями по три степени на каждый из них.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455147C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455146C2 |
| МОДУЛЬНАЯ РОБОТОТЕХНИЧЕСКАЯ ТЕХНОЛОГИЧЕСКАЯ УСТАНОВКА | 2011 |
|
RU2478464C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2009 |
|
RU2412798C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2008 |
|
RU2403141C2 |
| МЕХАНИЗМ С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2012 |
|
RU2498895C2 |
| МАНИПУЛЯТОР ДЛЯ СУБМИКРОННЫХ ПЕРЕМЕЩЕНИЙ | 2018 |
|
RU2679260C1 |
| ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2011 |
|
RU2465124C1 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403144C2 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403143C2 |
Изобретение относится к машиностроению, в частности к робототехническим установкам для обработки деталей. Установка для обработки деталей содержит основание и размещенные на нем модули для установки инструмента и для обработки детали. Основание выполнено в виде единой пространственной конструкции, состоящей из трех стоек и двух горизонтальных траверс, по одной на каждый из модулей. Траверсы выполнены в виде шестиугольников с тремя прямыми углами в местах их соединения со стойками. Каждый модуль выполнен в виде механизма параллельной структуры, а каждый из механизмов содержит выходное звено и три кинематические цепи. Последние включают вращательный двигатель, установленный на основании, промежуточную вращательную пару и шарнир, сопряженный с выходным звеном. Шарниры обоих модулей выполнены в виде сферической кинематической пары. Обеспечивается повышение технической и эксплуатационной эффективности устройств манипулирования в пространстве по шести координатам на базе кинематической развязки, выполняемой при помощи разделения числа степеней свободы между двумя модулями. 1 ил.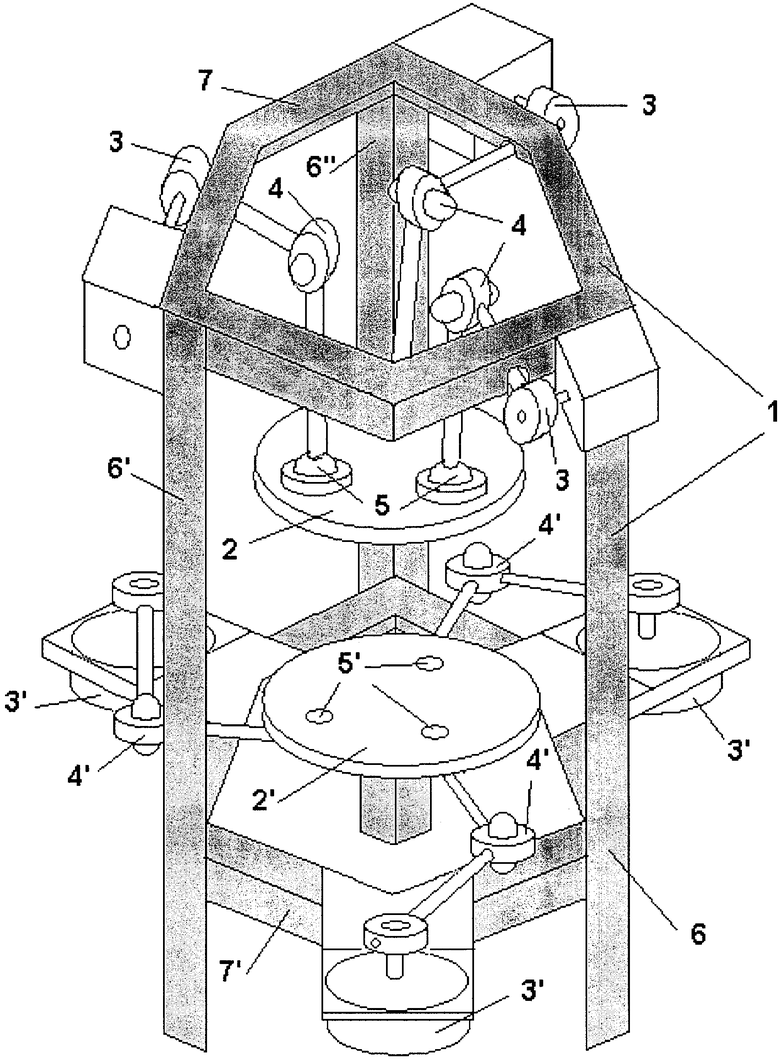
Робототехническая установка для обработки деталей, содержащая основание и размещенные на нем модуль для установки инструмента и модуль для обработки детали, выполненные в виде механизмов параллельной структуры, каждый из которых содержит выходное звено и три кинематические цепи, включающие вращательный двигатель, установленный на основании, промежуточную вращательную пару и шарнир, сопряженный с выходным звеном, причем шарнир модуля для установки инструмента выполнен в виде сферической кинематической пары, отличающаяся тем, что основание выполнено в виде единой пространственной конструкции, состоящей из трех стоек и двух горизонтальных траверс, по одной на каждый из модулей, траверсы выполнены в виде шестиугольников, имеющих прямые углы в местах соединения траверс со стойками, а шарнир модуля для установки обрабатываемой детали выполнен в виде сферической кинематической пары.
| РОБОТОТЕХНИЧЕСКАЯ ТЕХНОЛОГИЧЕСКАЯ УСТАНОВКА | 1993 |
|
RU2063329C1 |
| Учебный прибор для определения моментов инерции тел | 1936 |
|
SU51517A1 |
| RU 22620721 C1, 10.10.2005 | |||
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ СВАРКИ ПОДСБОРОК КУЗОВА АВТОМОБИЛЯ | 2002 |
|
RU2221683C1 |
| НАБОРНЫЙ ТЕЛЕГРАФНЫЙ ПЕРЕДАТЧИК ЗНАКОВ МОРЗЕ | 1923 |
|
SU3588A1 |
| JP 2006289364 A, 26.10.2006. | |||

