Изобретение относится к машиностроению, в частности к робототехнике, а именно к пространственным манипуляционным механизмам роботов с шестью степенями свободы и кинематической развязкой. Установка позволяет осуществлять обработку закрепленной на конечном звене детали расположенным на основании инструментом, поступательными движениями вдоль трех взаимно перпендикулярных осей, вращательным движением инструмента и двумя вращательными движениями обрабатываемой детали.
Известна робототехническая установка, описанная в Raza UR-REHMAN, Stephane CARO, Damien CHABLAT, Philippe WENGER Kinematic and Dynamic Analysis of the 2-DOF Spherical Wrist of Orthoglide 5-axis, 3 Int. Cong, and Modelling of Mechanical Systems CMSM 2009, March 16-18, 2009 Hammamet, Tunisia; в которой можно выделить модуль поступательных перемещений вдоль трех взаимно перпендикулярных осей и модуль вращательных перемещений, расположенный на выходном звене первого модуля. К ее недостаткам можно отнести взаимное влияние поступательных перемещений, что сильно усложняет управление движением инструмента.
Наиболее близкой по технической сущности к заявленному изобретению является робототехническая установка, описанная в работе X.Kong, С.Gosselin Type Synthesis of Parallel Mechanisms Springer-Verlag Berlin Heidelberg, 2007, p.15, fig.1.7a, включающая основание, выполненное в виде платформы с вертикальной стойкой, конечное звено и три двигателя поступательного перемещения, один из которых установлен на платформе основания, а второй - на вертикальной стойке, причем оси двигателей взаимно перпендикулярны, три кинематические цепи, каждая из которых содержит один из двигателей поступательного перемещения, три вращательные кинематические пары, оси которых параллельны оси соответствующего двигателя и два промежуточных звена, расположенных между вращательными кинематическими парами.
Эта установка принята за прототип. К ее недостаткам можно отнести отсутствие возможности крепления обрабатывающего инструмента и обрабатываемой детали, а также малое количество степеней подвижности. Кроме того, расположение двух поступательных двигателей на стойке снижает жесткость, что существенно при обработке детали.
Технический результат - устранение отмеченных недостатков, повышение надежности и расширение возможностей по обработке деталей. Технический результат достигается тем, что в известном устройстве - робототехнической установке, включающей основание с вертикальной стойкой, конечное звено и три двигателя поступательного перемещения, один из которых установлен на основании, а второй - на вертикальной стойке, причем оси двигателей взаимно перпендикулярны, три кинематические цепи, каждая из которых содержит один из двигателей поступательного перемещения, три вращательные кинематические пары, оси которых параллельны оси соответствующего двигателя, и два промежуточных звена, расположенных между вращательными кинематическими парами, новым является то, что третий двигатель поступательного перемещения установлен на основании, а конечное звено снабжено модулем для фиксации обрабатываемой детали, выполненным с возможностью вращения детали относительно оси, параллельной плоскости основания с помощью встроенного привода вращательного движения, а основание снабжено модулем для фиксации обрабатывающего инструмента с возможностью вращения его относительно оси, перпендикулярной плоскости основания с помощью привода вращательного движения, встроенного в модуль.
В частном случае возможно исполнение модульной робототехнической технологической установки, в которой модуль для фиксации обрабатываемой детали выполнен с возможностью поворота детали относительно двух взаимно перпендикулярных осей, одна из которых параллельна плоскости основания, для чего он оснащен дополнительным приводом вращательного движения.
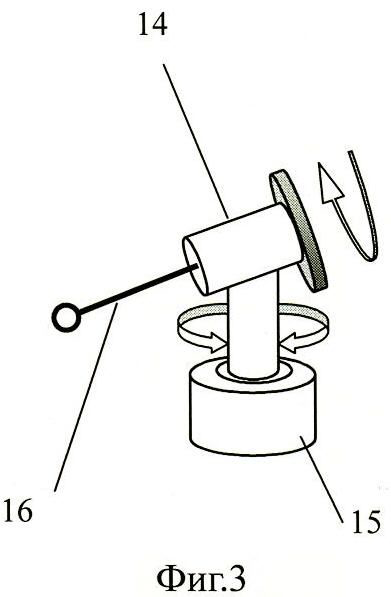
Возможно также оснащение модуля инструмента измерительной контактной головкой, которая с помощью приводов вращательного и поступательного движений позволяет контролировать форму обрабатываемой детали.
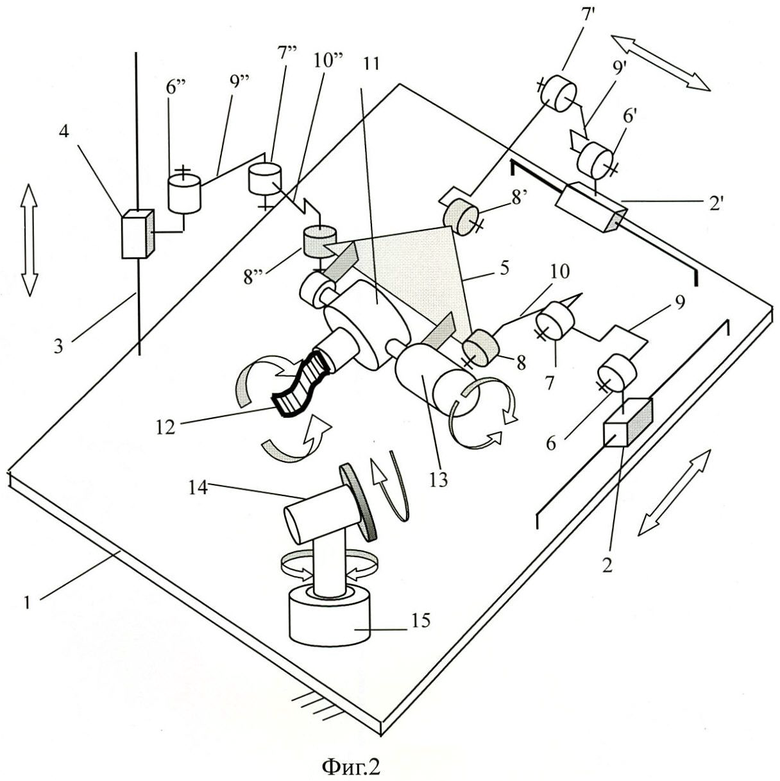
На Фиг.1 показана схема модульной робототехнической технологической установки, на Фиг.2 - частный случай ее исполнения, в котором модуль инструмента имеет две степени подвижности - вращения относительно взаимно перпендикулярных осей. На Фиг.3 - исполнение модуля обрабатывающего инструмента с оснащением его измерительной контактной головкой.
Робототехническая технологическая установка состоит из модуля поступательных перемещений и модулей вращательных перемещений обрабатываемой детали и инструмента. Модуль поступательных перемещений содержит горизонтально установленное основание 1, на котором расположены двигатели поступательного перемещения 2 и 2', оси которых лежат в плоскости основания и перпендикулярны друг другу. На основании, перпендикулярно ему, закреплена стойка 3 с расположенным на ней двигателем поступательного перемещения 4, ось которого перпендикулярна плоскости основания. Выходное звено 5 соединено с двигателями поступательного перемещения 2, 2' и 4 тремя кинематическими цепями, каждая из которых содержит три вращательные кинематические пары 6, 7, 8; 6', 7', 8' и 6'', 7'', 8'' соответственно, оси которых параллельны оси соответствующего двигателя и два промежуточных звена 9 и 10; 9' и 10'; 9'' и 10'', расположенных между вращательными кинематическими парами. На выходном звене закреплен модуль вращательных перемещений 11 обрабатываемой детали 12 с возможностью вращения вокруг оси, параллельной плоскости основания посредством встроенного в него привода вращательного перемещения
В частном случае модуль обрабатываемой детали имеет дополнительный привод вращательного перемещения 13 (Фиг.2), ось вращения которого перпендикулярна оси, параллельной плоскости основания. Модуль обрабатывающего инструмента 14, например, абразивный камень с приводом расположен на основании и оснащен приводом вращательного перемещения 15, обеспечивающего его поворот вокруг оси, перпендикулярной плоскости основания.
Модуль инструмента может быть также оснащен измерительной контактной головкой 16 (Фиг.3), которая с помощью приводов вращательных (11, 13 и 15) и поступательных (2, 2', 4) перемещений позволяет контролировать форму обрабатываемой детали скольжением щупа головки по поверхности детали.
Модульная робототехническая установка работает следующим образом. На основании 1 установлен модуль инструмента 14, например, абразивный камень с приводом. Положение инструмента может изменяться приводом вращательного перемещения 15. Обрабатываемая деталь 12 закрепляется на конечном звене 5 модулем детали. Углы установки детали определяются приводами вращательных перемещений 11 и 13 с установкой требуемого угла относительно одной оси, параллельной плоскости основания (Фиг.1), или двух взаимно перпендикулярных осей (Фиг.2). В модуле поступательных перемещений от установленных на основании приводов поступательного перемещения 2, 2' и установленного на стойке 3 двигателя поступательного перемещения 4 через три вращательные кинематические пары, оси которых параллельны оси соответствующего двигателя 6,7, 8; 6', 7', 8' и 6'', 7'', 8'' соответственно и два промежуточных звена 9 и 10; 9' и 10'; 9'' и 10'', расположенных между вращательными кинематическими парами, движение передается на конечное звено так, что деталь 11 подводится к установленному на основании инструменту 14. Угол установки детали определяется приводами 11 и 13 модуля детали. Движение детали относительно инструмента 14 позволяет осуществлять ее обработку. После завершения обработки возможна проверка формы обрабатываемой детали скольжением щупа измерительной контактной головки 16 (Фиг.3), с помощью приводов вращательных (11, 13 и 15) и поступательных (2, 2', 4) перемещений по поверхности детали, что позволяет контролировать форму обрабатываемой детали.
Таким образом, робототехническая установка позволяет обрабатывать детали различной формы относительным взаимным движением детали и инструмента.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТОТЕХНИЧЕСКАЯ УСТАНОВКА ДЛЯ ОБРАБОТКИ ДЕТАЛЕЙ | 2009 |
|
RU2415744C2 |
| РОБОТОТЕХНИЧЕСКАЯ ТЕХНОЛОГИЧЕСКАЯ УСТАНОВКА | 1993 |
|
RU2063329C1 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| ГИБКИЙ ПРОИЗВОДСТВЕННЫЙ МОДУЛЬ | 1989 |
|
RU2014201C1 |
| Робот-пропольщик с функцией фертигации | 2019 |
|
RU2694588C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2008 |
|
RU2384398C2 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758374C1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| ПАРАЛЛЕЛЬНЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2020 |
|
RU2753217C1 |
Изобретение относится к робототехнике, а именно к пространственным манипуляционным механизмам роботов с шестью степенями свободы и кинематической развязкой. Робототехническая установка включает основание с вертикальной стойкой, конечное звено, три двигателя поступательного перемещения, один из которых установлен на основании, второй - на вертикальной стойке, третий - также на основании, оси двигателей взаимно перпендикулярны, три кинематические цепи, каждая из которых содержит один из двигателей поступательного перемещения, три вращательные кинематические пары, оси которых параллельны оси соответствующего двигателя и два промежуточных звена, расположенных между вращательными кинематическими парами. Конечное звено снабжено модулем для фиксации обрабатываемой детали, выполненным с возможностью вращения детали относительно оси, параллельной плоскости основания с помощью встроенного привода вращательного движения, а основание снабжено модулем для удержания обрабатывающего инструмента с возможностью вращения его относительно оси, перпендикулярной плоскости основания с помощью привода вращательного движения, встроенного в модуль. Изобретение позволяет обрабатывать детали различной формы относительным взаимным движением детали и инструмента. 2 з.п. ф-лы, 3 ил.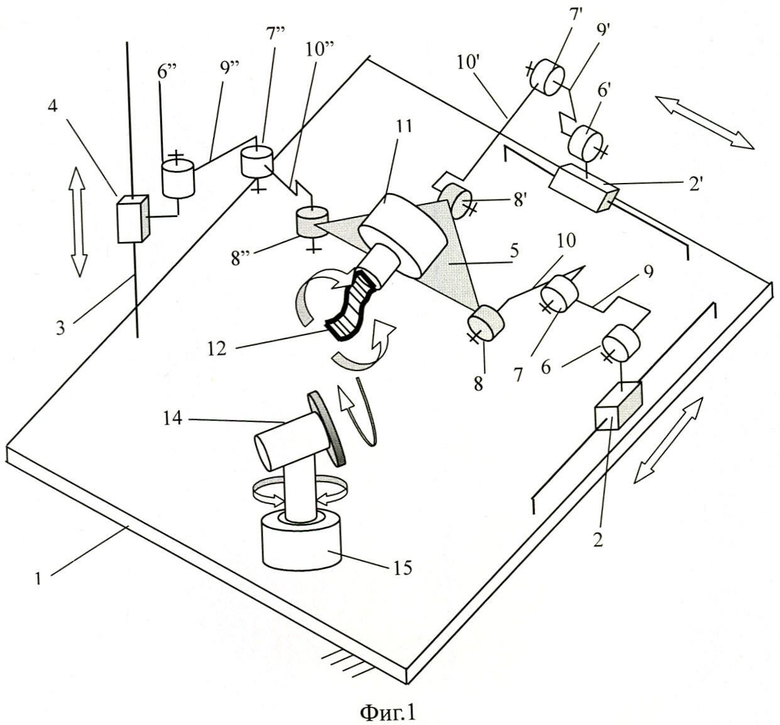
1. Модульная робототехническая установка, включающая основание с вертикальной стойкой, конечное звено, три двигателя поступательного перемещения, один из которых установлен на основании, а второй - на вертикальной стойке, причем оси двигателей взаимно перпендикулярны, три кинематические цепи, каждая из которых содержит один из двигателей поступательного перемещения, три вращательные кинематические пары, оси которых параллельны оси соответствующего двигателя, и два промежуточных звена, расположенных между вращательными кинематическими парами, отличающаяся тем, что третий двигатель поступательного перемещения установлен на основании, конечное звено снабжено модулем для фиксации обрабатываемой детали, выполненным с возможностью вращения детали относительно оси, параллельной плоскости основания, с помощью встроенного привода вращательного движения, а основание снабжено модулем для удержания обрабатывающего инструмента с возможностью вращения его относительно оси, перпендикулярной плоскости основания с помощью привода вращательного движения, встроенного в модуль.
2. Модульная робототехническая установка по п.1, отличающаяся тем, что модуль для фиксации обрабатываемой детали оснащен дополнительным приводом вращательного движения, обеспечивающим возможность поворота детали относительно двух взаимно перпендикулярных осей.
3. Модульная робототехническая установка по п.1, отличающаяся тем, что модуль для удержания обрабатывающего инструмента оснащен измерительной контактной головкой.
| РОБОТОТЕХНИЧЕСКАЯ ТЕХНОЛОГИЧЕСКАЯ УСТАНОВКА | 1993 |
|
RU2063329C1 |
| РОБОТОТЕХНИЧЕСКАЯ УСТАНОВКА ДЛЯ ОБРАБОТКИ ДЕТАЛЕЙ | 2009 |
|
RU2415744C2 |
| X.Kong, C.Gosselin Type Synthesis of Parallel Mechanisms Springer-Verlag Berlin Heidelberg; 2007, p.15, fig.1.7a | |||
| US 6729202 B2, 04.05.2004. | |||

