Изобретение относится к области радиолокации и может быть использовано в системах поиска объектов
Известно устройство определения дальности, представленное в книге «Радиотехнические системы», Ю.М.Козаринов, 1990, стр.194-197. В нем определяется дальность путем измерения времени следования отраженного от объекта сигнала. Однако точность определения дальности не всегда достаточна.
Известно устройство определения дальности, описанное в вышеупомянутом источнике на стр.262-265. В нем синхронизатор выдает команду передающему устройству для излучения импульса и в преобразователь дальности для осуществления начала отсчета дальности. Отраженный от объекта сигнал поступает в приемное устройство, осуществляющее преобразование электромагнитной энергии в электрический сигнал, поступающий в преобразователь дальности, который определяет временное рассогласование между импульсом с синхронизатора и сигналом с приемного устройства, представляющее из себя информацию о дальности. Последняя отображается на индикаторе. Однако точность определения дальности может быть не всегда достаточна. С помощью предлагаемого устройства увеличивается точность определения дальности.
Достигается это введением двух вычитателей, датчика измеренной дальности до эталонных объектов и постоянного запоминающего устройства. При этом группа выходов преобразователя дальности соединена с первой группой входов первого вычитателя, имеющего группу выходов и вторую группу входов, соответственно соединенных: с группой входов индикатора и с группой выходов второго вычитателя, имеющего первую группу входов, соединенную через постоянное запоминающее устройство с группой выходов датчика измеренной дальности до эталонных объектов, соединенного также со второй группой входов второго вычитателя и имеющего группу входов, соединенную с вышеупомянутой группой выходов преобразователя дальности.
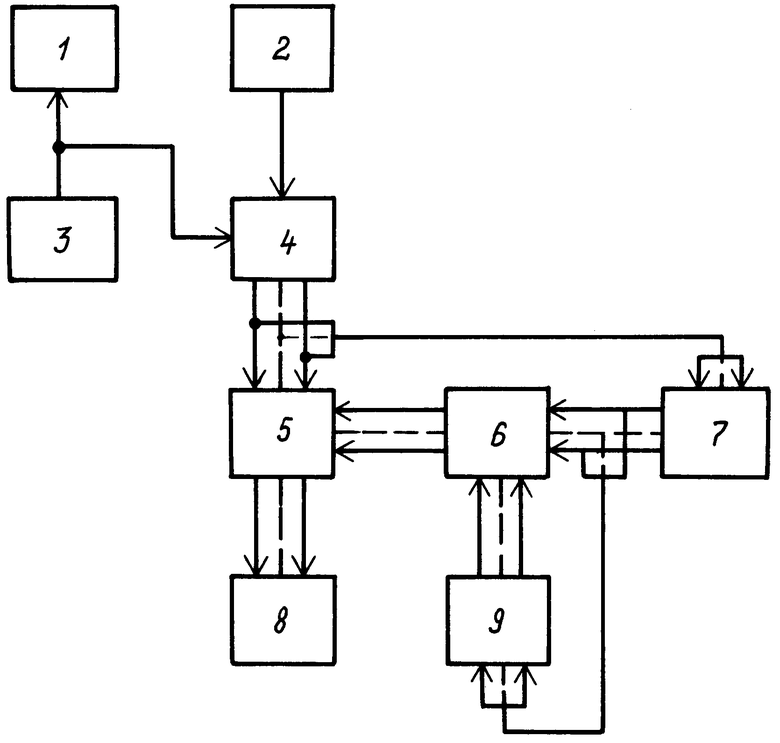
На чертеже и в тексте приняты следующие обозначения:
1 - передающее устройство
2 - приемное устройство
3 - синхронизатор
4 - преобразователь дальности
5, 6 - вычитатели
7 - датчик измеренной дальности до эталонных объектов
8 - индикатор
9 - постоянное запоминающее устройство
При этом выход синхронизатора 3 соединен с входом передающего устройства 1 и с первым входом преобразователя дальности 4, имеющего второй вход, соединенный с выходом приемного устройства 2, имеющего группу выходов, соединенную с первой группой входов вычитателя 5, имеющего группу выходов и вторую группу входов, соответственно соединенных с группой входов индикатора 8 и с группой выходов вычитателя 6, имеющего первую группу входов, соответственно соединенную через постоянное запоминающее устройство 9 с группой выходов датчика измеренной дальности до эталонных объектов 7, соединенного также с второй группой входов вычитателя 6, имеющего группу входов, соединенную с вышеупомянутой группой выходов преобразователя дальности 4.
Работа устройства осуществляется следующим образом.
Синхронизатор 3 выдает команду передающему устройству 1 для излучения зондирующего импульса и на первый вход преобразователя дальности 4 для осуществления начала отсчета дальности. Отраженные от объектов сигналы поступают в приемное устройство 2, осуществляющее преобразование электромагнитной энергии в электрические сигналы, поступающие далее на второй вход преобразователя дальности 4, который определяет временное рассогласование между импульсом с синхронизатора и сигналом с приемного устройства, представляющее из себя информацию о дальности. Пример использования преобразователя дальности представлен, например, в книге Васина В.В., Степанова Б.М. «Справочник-задачник по радиолокации», М., 1977, стр.214, фиг.9.7.
В отличие от прототипа в предлагаемое устройство вводятся дополнительные узлы, а именно: вычитатели 5, 6, датчик измеренных дальностей от эталонных объектов 7 и постоянное запоминающее устройство 9, при этом в качестве эталонных объектов могут быть использованы неподвижные объекты в поле зрения устройства, дальность до которых заранее определяется с необходимой точностью относительно радиолокатора. В вычитателе 6 определяется разность между измеренной дальностью до эталонных объектов и фактической дальностью до этих объектов. При этом измеренные дальности с выхода преобразователя дальности 4 поступают в датчик 7, где они выделяются в моменты наличия заранее известных направлений на эталонные объекты в процессе обзора. Выделенные дальности с датчика 7 поступают в постоянное запоминающее устройство 9, где для каждого значения дальностей, наиболее близко совпадающего с эталонной дальностью, зашивается эта эталонная дальность, которая вычитается в вычитателе 6 из выделенной измеренной дальности с датчика 7. Таким образом, выполняются функции блока вторичной обработки, представленные, например, в книге Пестрякова В.П. и др. «Радиотехнические системы», 1985, стр.219. При отсутствии искусственных эталонных объектов можно использовать естественные объекты.
Количество эталонных объектов зависит от условий распространения электромагнитной энергии и рефракции, которые могут отличаться на разных направлениях и меняться с течением времени. Разность от вычитателя 6, представляющая из себя значения уточнения дальности, поступает в вычитатель 5, где запоминается до момента прихода следующей разности и вычитается из измеренных дальностей до целей, поступающих с преобразователя дальности 4, и разности, представляющие из себя уточненные дальности до целей, отображаются на индикаторе 8. Пример исполнения вычитателя с запоминанием вычитаемой информации представлен в книге Орлова И.А., Корнюшко В.Ф. «Основы вычислительной техники и организация вычислительных работ», «Энергоатомиздат», М., 1984, стр.94-96. Предлагаемое устройство может быть использовано для поиска воздушных целей, в том числе и низколетящих, также для поиска наземных и надводных объектов. При стабильных условиях распространения радиоволн и отсутствия рефракции достаточно одного эталонного объекта. При этом на величину разности, поступающей с вычитателя 6, влияют задержки сигнала внутри устройства, которые могут меняться с течением времени.
В процессе настройки определяется количество эталонных неподвижных объектов и определяется фактическая дальность до них с точностью, например, 5 метров, которая должна соответствовать точности определения дальности данного устройства.
Устройство с уменьшенной дальностью действия, где достаточно одного эталонного объекта, можно использовать в системах контроля движения на автодорогах, используя в качестве эталонного объекта неподвижный объект, а также для контроля воздушного движения, безопасности движения кораблей. При этом в качестве эталонного объекта может быть выбран другой корабль или объект на берегу, дальность до которого может быть определена с помощью лазера. При контроле за воздушным движением, в том числе и в ближней зоне, в качестве эталонного объекта может быть использован воздушный объект, дальность до которого также может быть определена с помощью лазера. В этом варианте применения в блок обработки 7 от лазера поступает информация о дальности до эталонного подвижного объекта и направлении до него. И после поступления значения дальности от преобразователя дальности 4 блок обработки 7, после анализа поступившей информации, выдает эту дальность от преобразователя и дальность от лазера в вычитатель 6. При этом постоянное запоминающее устройство 9 не участвует в работе, и его входы отключаются. Аналогичные действия происходят при вышеупомянутом использовании в качестве эталонного объекта корабля, а также подвижного наземного объекта. Таким образом, использование предлагаемого устройства расширяет тактико-технические характеристики и функциональные возможности радиолокационных средств, а следовательно, и обеспечивается экономический эффект.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2012 |
|
RU2479851C2 |
| РАДИОЛОКАТОР | 2007 |
|
RU2337377C1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1994 |
|
RU2081431C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2005 |
|
RU2298807C2 |
| РАДИОЛОКАТОР | 1999 |
|
RU2161807C2 |
| РАДИОЛОКАТОР | 2008 |
|
RU2366970C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2006 |
|
RU2313106C1 |
| РАДИОЛОКАТОР | 1993 |
|
RU2073881C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2004 |
|
RU2253879C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ | 2010 |
|
RU2421749C1 |
Изобретение относится к области радиолокации и может быть использовано в системах поиска объектов. Достигаемый технический результат - увеличение точности определения дальности. Указанный результат достигается за счет того, что устройство определения дальности содержит синхронизатор, передающее устройство, приемное устройство, преобразователь дальности, индикатор, два вычитателя, датчик измеренной дальности до эталонных объектов и постоянное запоминающее устройство, соединенные между собой определенным образом. 1 ил.
Устройство определения дальности, состоящее из синхронизатора, передающего устройства, приемного устройства, преобразователя дальности и индикатора, где выход синхронизатора соединен с входом передающего устройства и с первым входом преобразователя дальности, имеющего второй вход, соединенный с выходом приемного устройства, отличающееся тем, что введены два вычитателя, датчик измеренной дальности до эталонных объектов и постоянное запоминающее устройство, при этом группа выходов преобразователя дальности соединена с первой группой входов первого вычитателя, имеющего группу выходов и вторую группу входов, соответственно соединенных с группой входов индикатора и с группой выходов второго вычитателя, имеющего первую группу входов, соединенную через постоянное запоминающее устройство с группой выходов датчика измеренной дальности до эталонных объектов, соединенного также со второй группой входов второго вычитателя и имеющего группу входов, соединенную с вышеупомянутой группой выходов преобразователя дальности.
| КАЗАРИНОВ Ю.М | |||
| Радиотехнические системы | |||
| - М.: Советское радио, 1990, с.262-265 | |||
| РАДИОЛОКАТОР | 2008 |
|
RU2366970C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2007 |
|
RU2333510C1 |
| US 6111536 A, 29.08.2000 | |||
| СПОСОБ ВЫЯВЛЕНИЯ СЛЕДОВ РУК | 2010 |
|
RU2428922C1 |
| US 7283086 B2, 16.10.2007 | |||
| Пылевыбивалка | 1990 |
|
SU1764627A1 |

