Изобретение относится к антенным опорам, в частности для объектов связи, предназначенных для размещения различных антенн беспроводной связи, а также может использоваться для навигационных и других высотных сооружений промышленного назначения.
Известен способ управления манипулятором как системой с распределенными параметрами, включающий управление манипулятором как системой с распределенными параметрами на заключительном этапе движения, обеспечивающее высокую точность позиционирования конечного звена и гашение колебаний при торможении на порядок и более (RU 2275297 С1), и принятый за прототип.
К причине, препятствующей достижению указанного ниже технического результата при применении известной конструкции, принятой за прототип, относится: управление системой с распределенными параметрами через задающее воздействие и лишь на заключительном этапе движения.
Технический результат - управление антенной опорой как системой с распределенными параметрами в течение всего периода ветрового возмущения, обеспечивающее высокую точность пространственного положения верхней точки антенной опоры и подавление на порядок и более ее колебаний от ветровых возмущений.
Технический результат достигается тем, что используется способ подавления колебаний антенной опоры как системы с распределенными параметрами от ветровых возмущений, включающий управление при помощи замкнутой системы с пропорционально-интегрально-дифференциальным регулятором (ПИД-регулятором), при этом для определения параметров ПИД-регулятора формируют передаточную функцию антенной опоры как системы с распределенными параметрами в виде колебательного звена, формируют амплитудно-фазо-частотную характеристику (АФЧХ) антенной опоры, постоянные времени доминирующего витка которой используют для определения параметров ПИД-регулятора. Особенностью является то, что управление системой осуществляют через сервомеханизм, который располагают в основании антенной опоры, в течение всего периода ветрового возмущения.
Заявленное изобретение поясняется чертежами.
Перечень фигур.
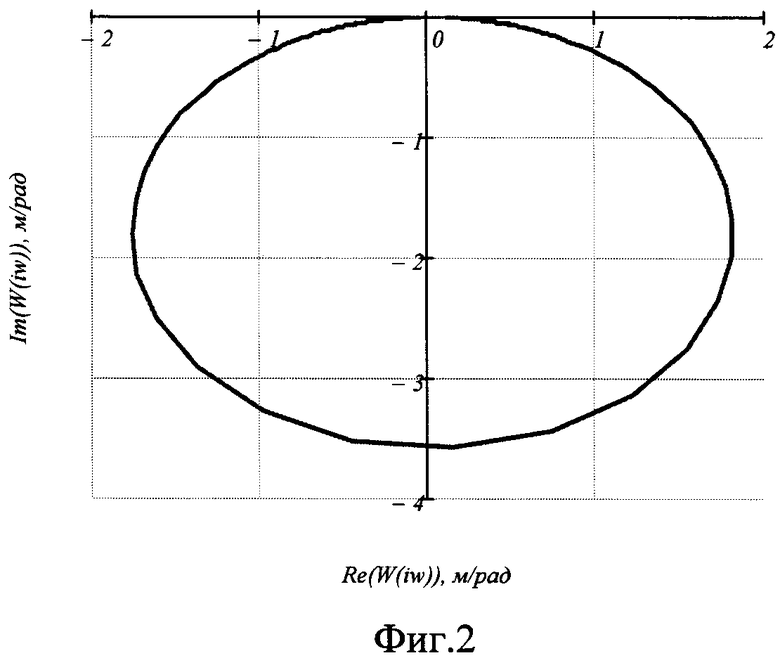
На фиг.1 изображена конструкция антенной опоры с сервомеханизмом в основании;
на фиг.2 изображена АФЧХ по перемещениям верхней точки антенной опоры без управления;
на фиг.3 изображена структурная схема системы управления;
на фиг.4 изображена АФЧХ по перемещениям верхней точки антенной опоры с управлением;
на фиг.5 изображен график переходного процесса по перемещениям верхней точки антенной опоры от единичного ветрового возмущения без управления;
на фиг.6 изображен график переходного процесса по перемещениям верхней точки антенной опоры от единичного ветрового возмущения с управлением.
Сущность изобретения заключается в следующем.
Антенная опора 1 (фиг.1) выполнена в виде вертикального стержня, в верхней части которого расположена площадка обслуживания 2. Антенная опора 1 с площадкой обслуживания 2 опирается на раму 3, шарнирно соединенную с неподвижным фундаментом 4 через сервомеханизм 5. Конструктивное исполнение антенной опоры 1 позволяет расположить ходовую лестницу и электрические кабели и фидеры как внутри, так и снаружи опоры 1 (не показаны).
При воздействии ветра на антенную опору 1 все ее точки перемещаются в соответствии с направлением ветра. Измеряемое значение перемещения верхней точки антенной опоры передают на ПИД-регулятор, который в соответствии с описываемым ниже алгоритмом построения передаточной функции вырабатывает управляющий сигнал. Затем его передают его на сервомеханизм 5, который располагают в основании антенной опоры, который воздействует на систему в течение всего периода ветрового возмущения, подавляя тем самым на порядок и более ее колебания от ветровых возмущений.
Изложенные выше соображения подтверждаются приведенным ниже расчетом.
Динамическое поведение антенной опоры описывается методом, основанным на обработке АФЧХ стержневой системы, построенной по методу перемещений, который является частным случаем метода конечных элементов, когда матрицы динамических жесткостей элементов получаются точным интегрированием [Санкин Ю.Н. Динамические характеристики вязко-упругих систем с распределенными параметрами / Ю.Н.Санкин // Саратов: Издательство Саратовского университета. - 1977. - 312 с.].
Уравнение динамики линейной вязкоупругой системы в операторной форме в перемещениях записывается следующим образом:

где u - вектор обобщенных смещений; R - матрица инерционных характеристик или удельная масса; B=T+DC1D* - оператор рассеивания энергии; K=DCD* - оператор теории упругости; f - вектор-функция внешних нагрузок; С и C1 - соответственно матрицы или тензоры упругих постоянных и коэффициентов внутреннего трения.
Граничные условия:  на S1; u=0 на S2.
на S1; u=0 на S2.
Начальные условия: 
Для учета внутреннего рассеивания энергии все характеристики упругости системы Е, С, ξ, заменяются комплексными величинами:
 где Е - модуль упругости, С - сосредоточенные жесткости, ξ - коэффициент упругого основания.
где Е - модуль упругости, С - сосредоточенные жесткости, ξ - коэффициент упругого основания.
Уравнение колебаний стержней с учетом сжимающих сил преобразуется по Лапласу при ненулевых начальных условиях и затем составляются уравнения равновесия узлов, которые представляют собой систему уравнений для неизвестных узловых перемещений, то есть соответствующих уравнений метода конечных элементов (МКЭ). Разрешающие уравнения в матричном виде для n-го узла записываются следующим образом:

где 



где n0 - матрица направляющих косинусов;  - матрицы динамических жесткостей стержня в местной системе координат, совпадающей с его главными центральными осями;
- матрицы динамических жесткостей стержня в местной системе координат, совпадающей с его главными центральными осями;  - вектор перемещений конца стержня от местной нагрузки. Элементы матриц и
- вектор перемещений конца стержня от местной нагрузки. Элементы матриц и  определяются по формулам, приведенным в [Гафуров Н.Т., Санкин Ю.Н. Частотный метод динамического расчета антенно-мачтовых сооружений как систем с распределенными параметрами при произвольных ветровых возмущениях // Известия Самарского научного центра российской академии наук. - 2007. Т.2. С.18-23].
определяются по формулам, приведенным в [Гафуров Н.Т., Санкин Ю.Н. Частотный метод динамического расчета антенно-мачтовых сооружений как систем с распределенными параметрами при произвольных ветровых возмущениях // Известия Самарского научного центра российской академии наук. - 2007. Т.2. С.18-23].
Решая полученные уравнения при p=i·ω, где р - параметр преобразования Лапласа, ω - частотный параметр, строятся АФЧХ для интересующих точек стержневой системы. АФЧХ по перемещениям верхней точки антенной опоры (фиг.1) без управления представлена на фиг.2.
Известно, что каждому витку АФЧХ соответствует один член ряда в разложении по форме колебаний [Санкин Ю.Н. Случайные колебания виброзащитных систем / Ю.Н.Санкин, С.Л.Пирожков // Ульяновск: Ульяновский государственный технический университет.- 2000. - 83 с.]. Между экстремальными точками АФЧХ и коэффициентами соответствующих членов ряда существует однозначная связь, которая используется для осуществления обратного преобразования Лапласа.

где Wsys (p) - передаточная функция антенной опоры без управления, ksys - коэффициент усиления; Tn1, Tn2 - постоянные времени.
Как видно из фиг.2, АФЧХ имеет один ярко выраженный доминирующий виток, что показывает, что система ведет себя как система с одной степенью свободы. Таким образом, оказывается возможным эффективно использовать замкнутую систему управления с ПИД-регулятором, структурная схема которой показана на фиг.3. Ее передаточная функция определяется по формуле [Барахов В.М., Санкин Ю.Н. Управление многозвенным манипулятором с распределенными параметрами // Автоматика и телемеханика. - 2007. №8. С.57-67]:

где  - передаточная функция ПИД-регулятора, kPID - коэффициент усиления ПИД-регулятора.
- передаточная функция ПИД-регулятора, kPID - коэффициент усиления ПИД-регулятора.
Подобная передаточная функция ПИД-регулятора на аналоговых элементах практически не реализуема, т.к. появляются неустойчивые самовозбуждающиеся контуры, вместе с тем, на цифровой основе такие функции вполне реализуемы.
АФЧХ по перемещениям верхней точки антенной опоры (фиг.1) с управлением представлена на фиг.4.
Принимая kPID=25, строим переходный процесс по перемещениям верхней точки антенной опоры от ветрового возмущения [Санкин Ю.Н. Случайные колебания виброзащитных систем / Ю.Н.Санкин, С.Л.Пирожков // Ульяновск: Ульяновский государственный технический университет. - 2000. - 83 с.].
График переходного процесса по перемещениям верхней точки антенной опоры (фиг.1) от единичного ветрового возмущения без управления представлен на фиг.5; с управлением - на фиг.6.
Произведенные расчеты показывают, что предлагаемый способ подавления колебаний антенной опоры как системы с распределенными параметрами от ветровых возмущений теоретически позволяет почти полностью исключить колебания антенной опоры от ветровых возмущений и обеспечить высокую точность пространственного положения ее верхней точки.




Изобретение относится к антенным опорам, в частности для объектов связи, предназначенных для размещения различных антенн беспроводной связи, а также может использоваться для навигационных и других высотных сооружений промышленного назначения. Техническим результатом является управление антенной опорой как системой с распределенными параметрами в течение всего периода ветрового возмущения, обеспечивающее высокую точность пространственного положения верхней точки антенной опоры и подавление на порядок и более ее колебаний от ветровых возмущений. Способ подавления колебаний антенной опоры как системы с распределенными параметрами от ветровых возмущений измеряет значение перемещения верхней точки антенной опоры, передают на ПИД-регулятор, который в соответствии с заданным алгоритмом построения передаточной функции вырабатывает управляющий сигнал, который передают на сервомеханизм, расположенный в основании антенной опоры, который воздействует на систему в течение всего периода ветрового возмущения, подавляя тем самым на порядок и более ее колебания от ветровых возмущений. 6 ил.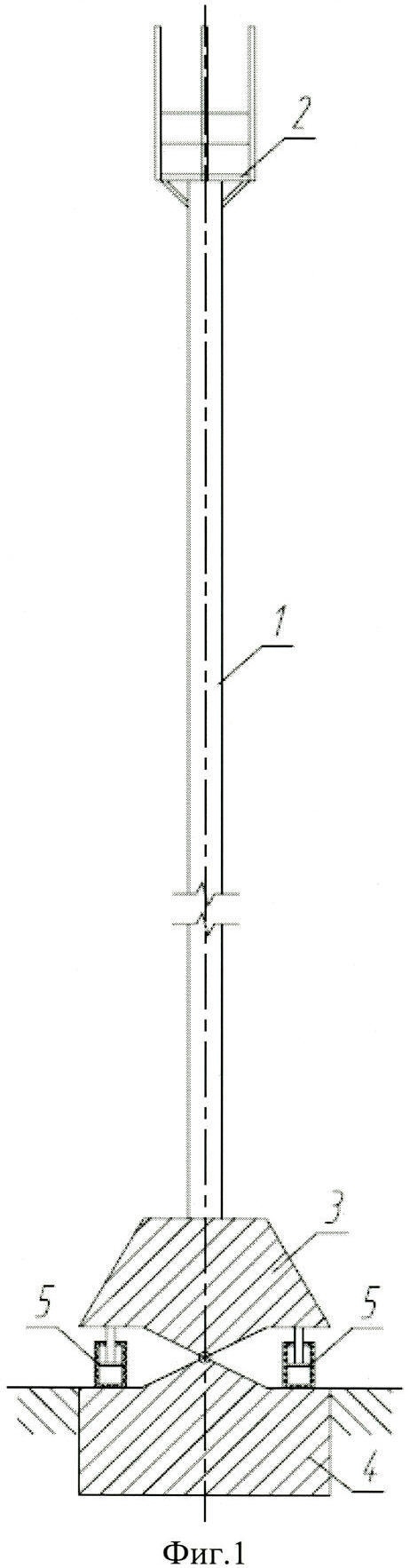
Способ подавления колебаний антенной опоры как системы с распределенными параметрами от ветровых возмущений, включающий управление при помощи замкнутой системы с ПИД-регулятором, при этом для определения параметров ПИД-регулятора формируют передаточную функцию антенной опоры как системы с распределенными параметрами в виде ряда в разложении по форме колебаний, формируют амплитудно-фазо-частотную характеристику антенной опоры, постоянные времени доминирующего витка которой используют для определения параметров ПИД-регулятора, отличающийся тем, что управление системой осуществляют через сервомеханизм, который располагают в основании антенной опоры, в течение всего периода ветрового возмущения.
| СПОСОБ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ КАК СИСТЕМОЙ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ | 2004 |
|
RU2275297C1 |
| АНТЕННАЯ СИСТЕМА | 2002 |
|
RU2277740C2 |
| СИСТЕМА КОРРЕКЦИИ ТРАЕКТОРИИ ДВИЖЕНИЯ АВТОМОБИЛЯ ПРИ БОКОВОМ ВЕТРОВОМ ВОЗМУЩЕНИИ | 2006 |
|
RU2320511C1 |
| WO 2006025915 A1, 09.03.2006. | |||

