Изобретение относится к области радиоэлектронной борьбы и может быть использовано для повышения эффективности постановки помех при обеспечении скрытого наведения перехватчиков на воздушную цель (ВЦ).
Известен способ наведения перехватчиков на ВЦ, заключающийся в устранении несоответствия Δ между требуемым jT и текущим j ускорением перехватчика в соответствии с алгоритмом траекторного управления Δ=jT-j. Причем
где N0 - навигационный параметр;
Vcб - скорость сближения;
ω - угловая скорость линии визирования [1].
Недостатком данного способа является невозможность при его реализации обеспечить скрытое наведение пары перехватчиков на ВЦ.
Известен способ скрытого наведения пары перехватчиков, заключающийся в том, что два перехватчика оснащаются станциями активных помех (САП), а их бортовые радиолокационные системы (БРЛС) объединены в систему с каналами обмена информацией (КОИ), определяется атакующий перехватчик, на котором работает БРЛС на излучение с выключенной САП и перехватчик прикрытия, на котором включена САП и выключена на излучение БРЛС, перехватчик прикрытия осуществляет командное наведение в соответствии с алгоритмом траекторного управления

где ψпп - текущий курс перехватчика прикрытия,
ψпп.тр - требуемый курс перехватчика прикрытия, вычисляемый в бортовой вычислительной системе (БВС) атакующего перехватчика с работающей на излучение БРЛС, в соответствии с выражением

где
arccos - тригонометрическая функция арккосинус;
Rап - расстояние от атакующего перехватчика до ВЦ;
 - скорость изменения расстояния от атакующего перехватчика до ВЦ;
- скорость изменения расстояния от атакующего перехватчика до ВЦ;
Vап - скорость полета перехватчика прикрытия;
Rп - расстояние от атакующего перехватчика до перехватчика прикрытия;
χ - весовой коэффициент, обеспечивающий устойчивость наведения перехватчика прикрытия;
 - требуемое значение коэффициента подавления приемника БРЛС атакующего перехватчика;
- требуемое значение коэффициента подавления приемника БРЛС атакующего перехватчика;
 - текущее значение коэффициента подавления приемника БРЛС атакующего перехватчика;
- текущее значение коэффициента подавления приемника БРЛС атакующего перехватчика;
w - константа, определяющая энергетические соотношения БРЛС и САП при фиксированной мощности САП;
Рсап - мощность помехи, излучаемая САП перехватчика прикрытия;
Gбл.сап - коэффициент направленного действия боковых лепестков диаграммы направленности (ДН) антенны САП;
Δƒпрм - полоса пропускания приемника БРЛС атакующего перехватчика;
 - коэффициент направленного действия боковых лепестков ДН антенны атакующего перехватчика;
- коэффициент направленного действия боковых лепестков ДН антенны атакующего перехватчика;
 - средняя излучаемая мощность БРЛС атакующего перехватчика;
- средняя излучаемая мощность БРЛС атакующего перехватчика;
 - коэффициент направленного действия по основному лепестку ДН антенны атакующего перехватчика;
- коэффициент направленного действия по основному лепестку ДН антенны атакующего перехватчика;
σц - эффективная поверхность отражения ВЦ;
Δƒп - ширина спектра помехи, излучаемой САП перехватчика прикрытия, до тех пор, пока параметр Δ1 рассогласования между текущим ψпп и требуемым ƒпп.тр курсами перехватчика прикрытия не будет равен нулю [2].
Недостатком данного способа является ограниченная продолжительность скрытого наведения пары перехватчиков на воздушную цель, обусловленная критическим расстоянием, определяемым безопасностью полетов, при сближении перехватчика прикрытия с атакующим перехватчиком для обеспечения требуемой эффективности постановки помех.
Скрытое наведение реализуется при обеспечении требуемой эффективности постановки помех, под которой понимается такая эффективность, при которой обеспечивается максимальное прикрытие атакующего перехватчика и одновременно обеспечивается на заданном уровне эффективность функционирования БРЛС атакующего перехватчика, в интересах получения информации о воздушной обстановке, требуемой для его наведения, снижающейся вследствие воздействия непреднамеренных помех со стороны САП перехватчика прикрытия.
Действительно, максимальная эффективность прикрытия атакующего перехватчика с работающей БРЛС может быть обеспечена, во-первых, при постановке помех перехватчика прикрытия с работающей САП по максимуму основного луча ДН антенны БРЛС противника, во-вторых, высокой излучаемой мощностью САП. Исходя из этого, чем ближе находится перехватчик прикрытия к атакующему перехватчику (т.е. помеха воздействует по основному лепестку ДН антенны БРЛС противника) и чем выше уровень излучаемой мощности САП, тем выше эффективность прикрытия. Однако, в этом случае увеличивается мощность непреднамеренных помех, создаваемых на входе приемника БРЛС атакующего перехватчика САП перехватчика прикрытия, что приводит к снижению эффективности ее (БРЛС) функционирования.
В свою очередь, эффективность функционирования БРЛС в условиях помех определяется коэффициентом подавления в виде требуемого (порогового) отношения мощности помехи к мощности сигнала, при котором БРЛС не подавлена, то есть, если обеспечить на входе приемника заданное, постоянное по величине значение текущего отношения мощности помехи к мощности сигнала (текущий коэффициент подавления), меньшее порогового ее значения (коэффициента подавления), то будет обеспечена требуемая эффективность функционирования ЕРЛС атакующего перехватчика. Наряду с этим, в процессе сближения атакующего перехватчика при работе его БРЛС на излучение с ВЦ, происходит увеличение мощности принимаемого сигнала, отраженного от нее, что обуславливает при постоянном уровне непреднамеренной помехи (при поддержании перехватчиком прикрытия формы боевого порядка «фронт» с постоянным интервалом между перехватчиками пары и фиксированном значении излучаемой САП мощности) уменьшение текущего коэффициента подавления. Такое уменьшение текущего коэффициента подавления может быть использовано для повышения эффективности прикрытия атакующего перехватчика посредством последовательной реализации двух процедур. Во-первых, путем сближения перехватчика прикрытия с атакующим перехватчиком в соответствии с законом увеличения мощности принимаемого сигнала, отраженного от самолета противника, во-вторых, при достижении в процессе сближения критического значения расстояния между перехватчиками пары, определяемого безопасностью полетов (перехватчик прикрытия находится в основном луче ДН антенны БРЛС противника и, как следствие, происходит усиление помехи по основному лучу ДН антенны БРЛС противника), путем увеличения излучаемой мощности САП перехватчика прикрытия в соответствии с законом увеличения мощности принимаемого сигнала, отраженного от самолета противника, при поддержании фиксированного расстояния между перехватчиками пары. В результате такого последовательного сближения перехватчика прикрытия с атакующими перехватчиком при фиксированной мощности САП перехватчика прикрытия и увеличения излучаемой мощности САП перехватчика прикрытия при фиксированном расстояниями между перехватчиками пары будет постоянно увеличиваться мощность непреднамеренной помехи на входе приемника БРЛС атакующего перехватчика пропорционально увеличению мощности сигнала, отраженного от самолета противника, обеспечивая, наряду с высокой эффективностью прикрытия атакующего перехватчика, заданную эффективность функционирования его БРЛС. При реализации такого подхода будет увеличена продолжительность скрытого наведения пары перехватчиков, по отношению к ситуации управления только пространственным положением перехватчика прикрытия при реализации алгоритма траекторного управления (1).
Цель изобретения - увеличение продолжительности скрытого наведения пары перехватчиков на ВЦ.
Указанная цель достигается тем, что в способе скрытого наведения пары перехватчиков на ВЦ, заключающимся в том, что два перехватчика оснащаются САП, а их БРЛС объединены в систему с КОИ, определяется атакующий перехватчик, на котором работает БРЛС на излучение с выключенной САП и перехватчик прикрытия, на котором включена САП и выключена на излучение БРЛС, перехватчик прикрытия осуществляет командное наведение в соответствии с алгоритмом траекторного управления (1), до тех пор, пока параметр Δ1 рассогласования между текущим ψпп и требуемым ψпп.тр курсами перехватчика прикрытия не будет равен нулю, причем требуемый курс ψпп.тр перехватчика прикрытия вычисляется в БВС атакующего перехватчика с работающей на излучение БРЛС, в соответствии с выражением (2), дополнительно, при достижении расстояния Rп между перехватчиками пары критического значения, определяемого безопасностью полетов Rп.бп, командное наведение в соответствии с алгоритмом (1) прекращается и перехватчик прикрытия осуществляет поддержание боевого порядка «фронт» с фиксированным расстоянием между перехватчиками пары Rп.бп, в БВС атакующего перехватчика с работающей на излучение БРЛС вычисляется требуемое изменение излучаемой мощности САП  перехватчика прикрытия, учитывающее взаимное расположение атакующего перехватчика, перехватчика прикрытия и ВЦ, в соответствии с выражением
перехватчика прикрытия, учитывающее взаимное расположение атакующего перехватчика, перехватчика прикрытия и ВЦ, в соответствии с выражением

где

q - коэффициент штрафов за точность управления;
k - коэффициент штрафов за экономичность управления;
w1 - константа, определяющая энергетические соотношения БРЛС и САП при фиксированном расстоянии между перехватчиками пары,
вычисленное значение требуемого изменения излучаемой мощности САП  перехватчика прикрытия с атакующего перехватчика по КОИ передается на перехватчик прикрытия, в САП перехватчика прикрытия осуществляется управление значением излучаемой мощности в соответствии с алгоритмом
перехватчика прикрытия с атакующего перехватчика по КОИ передается на перехватчик прикрытия, в САП перехватчика прикрытия осуществляется управление значением излучаемой мощности в соответствии с алгоритмом

где  - текущее изменение излучаемой мощности САП, до тех пор, пока параметр Δ2 рассогласования между текущим
- текущее изменение излучаемой мощности САП, до тех пор, пока параметр Δ2 рассогласования между текущим  и требуемым
и требуемым  значениями изменения излучаемой мощности САП перехватчика прикрытия не будет равен нулю.
значениями изменения излучаемой мощности САП перехватчика прикрытия не будет равен нулю.
Новыми признаками, обладающими существенным отличием, являются.
1. При достижении расстояния Rп между перехватчиками пары критического значения, определяемого безопасностью полетов Rп.бп, командное наведение в соответствии с алгоритмом (1) прекращается и перехватчик прикрытия осуществляет поддержание боевого порядка «фронт» с фиксированным расстоянием между перехватчиками пары, равным Rп.бп.
2. Вычисление в БВС атакующего перехватчика в соответствии с выражением (3) требуемого изменения излучаемой мощности САП  перехватчика прикрытия, учитывающее взаимное расположение атакующего перехватчика, перехватчика прикрытия и ВЦ и передача его по КОИ перехватчику прикрытия.
перехватчика прикрытия, учитывающее взаимное расположение атакующего перехватчика, перехватчика прикрытия и ВЦ и передача его по КОИ перехватчику прикрытия.
3. Управление значением излучаемой мощности САП перехватчика прикрытия в соответствии с алгоритмом (4).
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение новых признаков, в совокупности с известными, позволит увеличить продолжительность скрытого наведения пары перехватчиков на ВЦ за счет дополнительного управления мощностью излучения САП перехватчика прикрытия, после использования всего ресурса обеспечения скрытного самонаведения за счет управления пространственным положением перехватчика прикрытия.
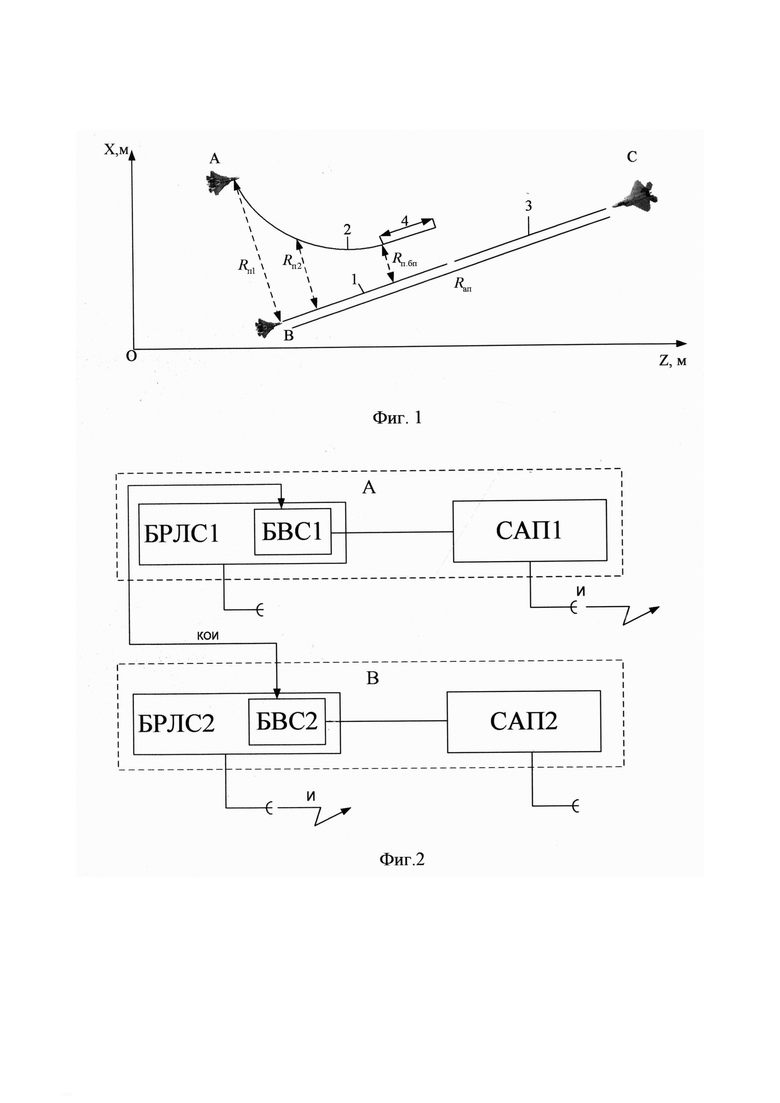
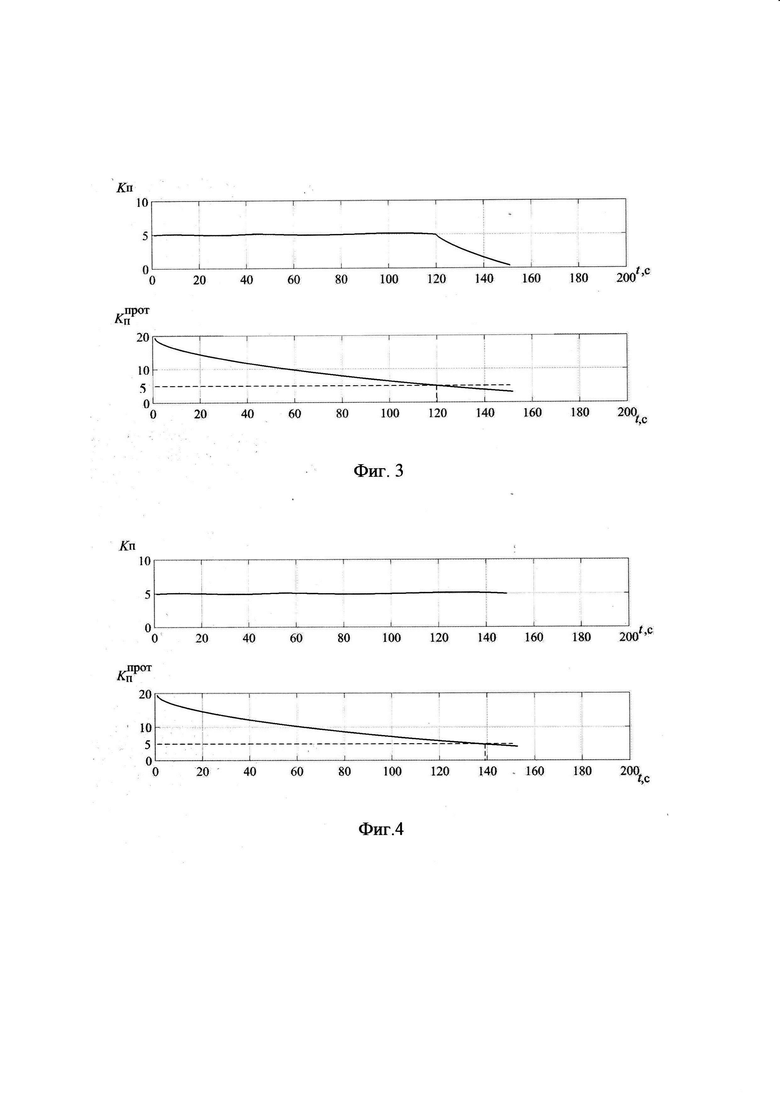
На фиг. 1 в декартовой системе координат XOZ приведена тактическая ситуация, соответствующая наведению двух перехватчиков «А» и «В» с их БРЛС и САП на самолет противника «С», где обозначены траектории наведения: 1- атакующего перехватчика; 2, 4 - перехватчика прикрытия; 3 - ВЦ, на фиг. 2 - структурная схема совместного функционирования БРЛС и САП; на фиг. 3 - результаты моделирования в виде зависимостей текущего коэффициента подавления на входе БРЛС атакующего перехватчика и самолета противника от времени наведения при реализации алгоритма (1); на фиг. 4 - результаты моделирования в виде зависимостей текущего коэффициента подавления на входе БРЛС атакующего перехватчика и самолета противника от времени наведения при последовательной реализации алгоритмов (1) и (4).
Коэффициент подавления БРЛС атакующего перехватчика и ВЦ принят, равным 5, что означает, если в процессе наведения текущее значение коэффициента подавления Кп≤5, то БРЛС работает с заданной эффективностью, в противном случае - БРЛС подавлена.
Способ скрытого наведения пары перехватчиков на воздушную цель реализуется следующим образом.
Импульсно-доплеровские БРЛС двух перехватчиков (фиг. 2) объединены в систему с КОИ, оба перехватчика оснащены станциями активных помех САП1 и САП2 соответственно. Пусть перехватчик «В» определен атакующим перехватчиком, на котором работает на излучение «И» БРЛС2 с выключенной САП2, перехватчик «А» - перехватчиком прикрытия, на котором включена на излучение «И» САП1 и выключена на излучение БРЛС1.
Перехватчик прикрытия осуществляет командное наведение в соответствии с алгоритмом траекторного управления (1) до тех пор, пока параметр Δ1 рассогласования между текущим ψпп и требуемым ψпп.тр курсами перехватчика прикрытия не будет равен нулю и, тем самым, осуществляя целенаправленное уменьшение расстояния Rп между ним и атакующим перехватчиком (Rп2<Rп1 (фиг. 1)). Причем, численное значение требуемого курса ψпп.тр перехватчика прикрытия, учитывающее пространственное положение (дальность) Rап атакующего перехватчика, изменяющееся в процессе его сближения с воздушной целью «С» (фиг. 1).вычисляется в БВС2 атакующего перехватчика в соответствии с выражением (2), и с атакующего перехватчика по КОИ передается в БВС1.
При достижении расстояния между перехватчиками пары Rп критического значения Rп.бп, определяемого безопасностью полетов, командное наведение в соответствии с алгоритмом (1) прекращается и перехватчик прикрытия осуществляет поддержание боевого порядка «фронт» с фиксированным расстоянием между перехватчиками пары Rп.бп (участок траектории перехватчика прикрытия - 4 (фиг. 1). В БВС2 атакующего перехватчика с работающей на излучение «И» БРЛС2 вычисляется требуемое изменение излучаемой мощности САП1  перехватчика прикрытия, учитывающее взаимное расположение атакующего перехватчика, перехватчика прикрытия и воздушной цели, в соответствии с выражением (3). Вычисленное значение требуемого изменения излучаемой мощности САП1
перехватчика прикрытия, учитывающее взаимное расположение атакующего перехватчика, перехватчика прикрытия и воздушной цели, в соответствии с выражением (3). Вычисленное значение требуемого изменения излучаемой мощности САП1  перехватчика прикрытия с атакующего перехватчика по КОИ передается из БВС2 в БВС1 перехватчика прикрытия (фиг. 2). В САП1 перехватчика прикрытия осуществляется управление значением излучаемой мощности в соответствии с алгоритмом траекторного управления (4) до тех пор, пока параметр А2 рассогласования между текущим
перехватчика прикрытия с атакующего перехватчика по КОИ передается из БВС2 в БВС1 перехватчика прикрытия (фиг. 2). В САП1 перехватчика прикрытия осуществляется управление значением излучаемой мощности в соответствии с алгоритмом траекторного управления (4) до тех пор, пока параметр А2 рассогласования между текущим  и требуемым
и требуемым  значениями изменения излучаемой мощности САШ перехватчика прикрытия не будет равен нулю.
значениями изменения излучаемой мощности САШ перехватчика прикрытия не будет равен нулю.
В результате моделирования установлено, что при реализации алгоритма (2) (управление осуществляется только пространственным положением перехватчика прикрытия (фиг. 3)) на входе приемника БРЛС атакующего перехватчика в интервале времени наведения 0-120 секунд обеспечивается значение Кп=5 и Кп<5 - в интервале времени 120-150 секунд. Это свидетельствует об устойчивой работе БРЛС атакующего перехватчика на протяжении всего процесса наведения. Наряду с этим, на входе приемника БРЛС самолета противника обеспечивается ее подавление в интервале времени 0-120 секунд, так как текущее значение коэффициента подавления на входе приемника его БРЛС  в интервале времени 120-150 секунд БРЛС противника работает устойчиво, так как
в интервале времени 120-150 секунд БРЛС противника работает устойчиво, так как  . В данном случае пара перехватчиков скрытно наводится на ВЦ в результате эффективной постановки помех в интервале времени 0-120 секунд.
. В данном случае пара перехватчиков скрытно наводится на ВЦ в результате эффективной постановки помех в интервале времени 0-120 секунд.
При последовательной реализации алгоритмов траекторного управления (2) и (4) в интервале времени 0-150 секунд БРЛС атакующего перехватчика работает устойчиво, так как Кп=5 (фиг. 4). Наряду с этим, БРЛС противника подавлена в интервале 0-140 секунд, так как  и, лишь в интервале времени 140-150 секунд БРЛС самолета противника работает устойчиво, так как В этом случае пара перехватчиков скрытно наводится на ВЦ в интервале времени 0-140 секунд.
и, лишь в интервале времени 140-150 секунд БРЛС самолета противника работает устойчиво, так как В этом случае пара перехватчиков скрытно наводится на ВЦ в интервале времени 0-140 секунд.
Сравнительный анализ результатов моделирования при реализации только алгоритма траекторного управления (2) и при последовательной реализации алгоритмов (2) и (4) показывает, что продолжительность скрытого наведения пары перехватчиков увеличена на 20 секунд.
Таким образом, предлагаемый способ позволит увеличить продолжительность скрытого наведения пары перехватчиков на воздушную цель.
Источники информации
1. Авиационные системы радиоуправления. Т. 2. Радиоэлектронные системы самонаведения / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника», 2003, стр. 24, ф-ла 7.32. (аналог).
2. Пат. 2789849 Российская Федерация, МПК G01S 7/38 (2006.01). Способ совместного функционирования бортовых радиолокационных станций и станций активных помех при распределении задач поражения и прикрытия между истребителями пары / Закомолдин Д.В. Богданов А.В., Часовских С.А., Рыльцин И.А.; заявитель и патентообладатель ВА ВКО им. Г.К. Жукова Тверь. - 2022117220, заявл. 24.06.22; опубл. 14.02.23, бюл. №5 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления пространственным положением и режимами работы бортовой станции активных помех для обеспечения скрытого самонаведения пары перехватчиков на воздушную цель | 2024 |
|
RU2830067C1 |
| Способ совместного функционирования бортовых радиолокационных станций и станций активных помех при распределении задач поражения и прикрытия между истребителями пары | 2022 |
|
RU2789849C1 |
| Способ совместного функционирования бортовых РЛС и станций активных помех при групповых действиях истребителей | 2020 |
|
RU2760329C1 |
| Способ совместного функционирования бортовых радиолокационных станций и станций активных помех пары истребителей при распознавании пущенной противником противорадиолокационной ракеты | 2022 |
|
RU2800232C1 |
| Способ функционирования импульсно-доплеровской бортовой радиолокационной станции при обнаружении воздушной цели - носителя станций радиотехнической разведки и активных помех | 2018 |
|
RU2679597C1 |
| СПОСОБ ПОРАЖЕНИЯ НАЗЕМНЫХ СТАНЦИЙ АКТИВНЫХ ПОМЕХ БОРТОВЫМ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ САМОЛЕТОВ САМОНАВОДЯЩИМСЯ ПО РАДИОИЗЛУЧЕНИЮ ОРУЖИЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2506522C2 |
| Способ функционирования системы импульсно-доплеровских бортовых радиолокационных станций группы истребителей при обеспечении их электромагнитной совместимости в условиях воздействия помех | 2020 |
|
RU2742815C1 |
| Способ функционирования системы импульсно-доплеровских бортовых радиолокационных станций при групповых действиях истребителей | 2019 |
|
RU2728280C1 |
| Способ функционирования импульсно-доплеровской бортовой радиолокационной станции истребителя при обеспечении энергетической скрытности её работы на излучение | 2019 |
|
RU2694891C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ИСТРЕБИТЕЛЕМ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ПРИ ЕГО БЛИЖНЕМ НАВЕДЕНИИ НА ГРУППОВУЮ ВОЗДУШНУЮ ЦЕЛЬ | 2015 |
|
RU2593911C1 |
Изобретение относится к области радиоэлектронной борьбы и может быть использовано для повышения эффективности постановки помех при обеспечении скрытого наведения перехватчиков на воздушную цель. Технический результат – увеличение продолжительности скрытого наведения пары перехватчиков на воздушную цель за счет последовательного управления пространственным положением перехватчика - носителя станции активных помех и ее мощностью. Заявленный способ заключается в том, что два перехватчика оснащают станциями активных помех, а их бортовые радиолокационные станции объединяют в систему с каналами обмена информацией. Определяется атакующий перехватчик с работающей на излучение бортовой радиолокационной системой и перехватчик прикрытия с работающей на излучение станцией активных помех. Причем перехватчик прикрытия осуществляет целенаправленное сближение с атакующим истребителем в процессе его наведения, обеспечивая с одной стороны максимальную эффективность прикрытия, т.к. при сближении с объектом прикрытия помеха, формируемая для подавления бортовой радиолокационной системы противника, ставится по максимуму основного лепестка ее диаграммы направленности антенны, с другой стороны, обеспечивая работу бортовой радиолокационной системы атакующего перехватчика с заданной эффективностью, которая может снижаться вследствие увеличивающегося в результате сближения уровня непреднамеренных помех. При достижении расстояния между перехватчиками пары критического значения, определяемого безопасностью полетов, перехватчик прикрытия переходит от управления своим пространственным положением относительно атакующего перехватчика к управлению мощностью излучения станции активных помех, сохраняя фиксированное расстояние между перехватчиками пары. 4 ил.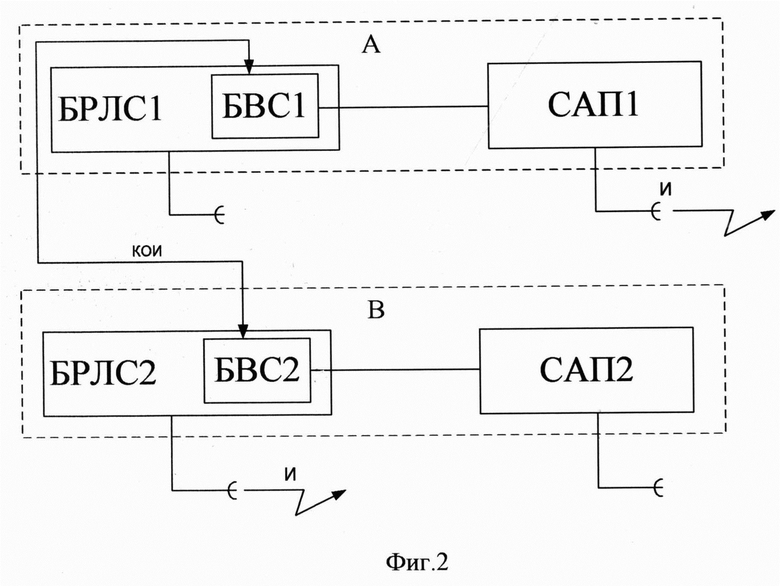
Способ скрытого наведения пары перехватчиков на воздушную цель, заключающийся в том, что два перехватчика оснащаются станциями активных помех, а их бортовые радиолокационные станции объединены в систему с каналами обмена информацией, определяется атакующий перехватчик, на котором работает бортовая радиолокационная система на излучение с выключенной станцией активных помех и перехватчик прикрытия, на котором включена станция активных помех и выключена на излучение бортовая радиолокационная система, перехватчик прикрытия осуществляет командное наведение в соответствии с алгоритмом траекторного управления

где ψпп - текущий курс перехватчика прикрытия;
ψпп.тр - требуемый курс перехватчика прикрытия, вычисляемый в бортовой вычислительной системе атакующего перехватчика с работающей на излучение бортовой радиолокационной системой, в соответствии с выражением

где
arccos - тригонометрическая функция арккосинус;
Rап - расстояние от атакующего перехватчика до воздушной цели;
 - скорость изменения расстояния от атакующего перехватчика до воздушной цели;
- скорость изменения расстояния от атакующего перехватчика до воздушной цели;
Vпп - скорость полета перехватчика прикрытия;
Rп - расстояние от атакующего перехватчика до перехватчика прикрытия;
χ - весовой коэффициент, обеспечивающий устойчивость наведения перехватчика прикрытия;
 - требуемое значение коэффициента подавления приемника бортовой радиолокационной системы атакующего перехватчика;
- требуемое значение коэффициента подавления приемника бортовой радиолокационной системы атакующего перехватчика;
 - текущее значение коэффициента подавления приемника бортовой радиолокационной системы атакующего перехватчика;
- текущее значение коэффициента подавления приемника бортовой радиолокационной системы атакующего перехватчика;
w - константа, определяющая энергетические соотношения бортовой радиолокационной системы и станции активных помех при фиксированной мощности станции активных помех;
Рсап - мощность помехи, излучаемая станцией активных помех перехватчика прикрытия;
Gбл.сап - коэффициент направленного действия боковых лепестков диаграммы направленности антенны станции активных помех;
Δƒпрм - полоса пропускания приемника бортовой радиолокационной системы атакующего перехватчика;
 - коэффициент направленного действия боковых лепестков диаграммы направленности антенны атакующего перехватчика;
- коэффициент направленного действия боковых лепестков диаграммы направленности антенны атакующего перехватчика;
 - средняя излучаемая мощность бортовой радиолокационной системы атакующего перехватчика;
- средняя излучаемая мощность бортовой радиолокационной системы атакующего перехватчика;
 - коэффициент направленного действия по основному лепестку диаграммы направленности антенны атакующего перехватчика;
- коэффициент направленного действия по основному лепестку диаграммы направленности антенны атакующего перехватчика;
σц - эффективная поверхность отражения воздушной цели;
Δƒп - ширина спектра помехи, излучаемой станцией активных помех перехватчика прикрытия, до тех пор, пока параметр Δ1 рассогласования между текущим ψпп и требуемым ψпп.тр курсами перехватчика прикрытия не будет равен нулю, отличающийся тем, что при достижении расстояния между перехватчиками пары критического значения Rп.бп, определяемого безопасностью полетов, командное наведение в соответствии с алгоритмом (1) прекращается и перехватчик прикрытия осуществляет поддержание боевого порядка «фронт» с фиксированным расстоянием Rп.бп между перехватчиками пары, в бортовой вычислительной системе атакующего перехватчика с работающей на излучение бортовой радиолокационной системой вычисляется требуемое изменение излучаемой мощности станцией активных помех  перехватчика прикрытия, учитывающее взаимное расположение атакующего перехватчика, перехватчика прикрытия и воздушной цели, в соответствии с выражением
перехватчика прикрытия, учитывающее взаимное расположение атакующего перехватчика, перехватчика прикрытия и воздушной цели, в соответствии с выражением

где

q - коэффициент штрафов за точность управления;
k - коэффициент штрафов за экономичность управления;
w1 - константа, определяющая энергетические соотношения бортовой радиолокационной системы и станции активных помех при фиксированном расстоянии между перехватчиками пары, вычисленное значение требуемого изменения излучаемой мощности  станцией активных помех перехватчика прикрытия с атакующего перехватчика по каналу обмена информацией передается на перехватчик прикрытия, в бортовой станции активных помех перехватчика прикрытия осуществляется управление значением излучаемой мощности в соответствии с алгоритмом
станцией активных помех перехватчика прикрытия с атакующего перехватчика по каналу обмена информацией передается на перехватчик прикрытия, в бортовой станции активных помех перехватчика прикрытия осуществляется управление значением излучаемой мощности в соответствии с алгоритмом

где  - текущее изменение излучаемой мощности станцией активных помех, до тех пор, пока параметр Δ2 рассогласования между текущим
- текущее изменение излучаемой мощности станцией активных помех, до тех пор, пока параметр Δ2 рассогласования между текущим  и требуемым
и требуемым  значениями изменения излучаемой мощности станцией активных помех перехватчика прикрытия не будет равен нулю.
значениями изменения излучаемой мощности станцией активных помех перехватчика прикрытия не будет равен нулю.
| Способ совместного функционирования бортовых радиолокационных станций и станций активных помех при распределении задач поражения и прикрытия между истребителями пары | 2022 |
|
RU2789849C1 |
| Способ автоматического группового целераспределения истребителей с учетом приоритета целей | 2018 |
|
RU2690234C1 |
| Способ совместного функционирования бортовых РЛС и станций активных помех при групповых действиях истребителей | 2020 |
|
RU2760329C1 |
| РАСПРЕДЕЛЕННЫЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ГРУППЫ МНОГОФУНКЦИОНАЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2232102C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2759057C1 |
| CN 113641191 A, 12.11.2021 | |||
| CN 114995500 A, 02.09.2022 | |||
| CN 114911269 A, 16.08.2022 | |||
| US 7451023 B2, 11.11.2008. | |||
