Текст описания приведен в факсимильном виде.















| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2465613C1 |
| Способ и устройство определения координат источников радиоизлучения | 2017 |
|
RU2659810C1 |
| Способ и устройство определения координат источников радиоизлучения | 2018 |
|
RU2700767C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2536609C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2011 |
|
RU2469408C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2012 |
|
RU2513900C1 |
| Способ определения географических координат источников радиоизлучения в многоцелевой обстановке | 2021 |
|
RU2773307C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2009 |
|
RU2419162C1 |
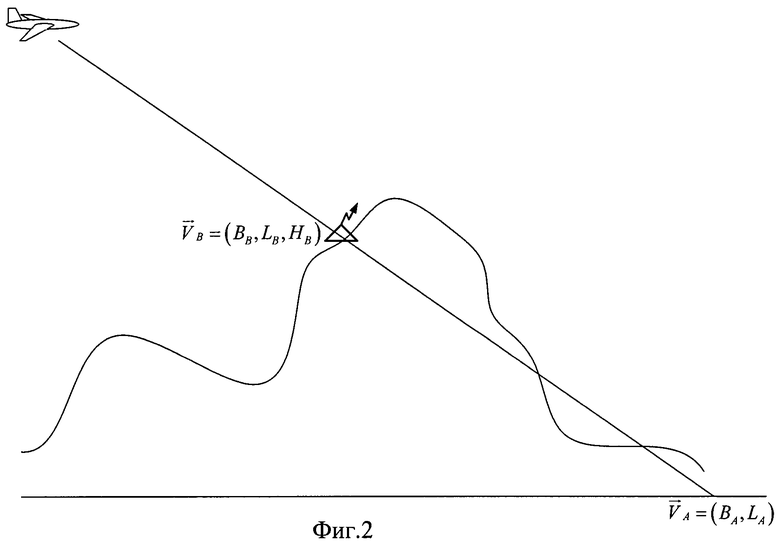

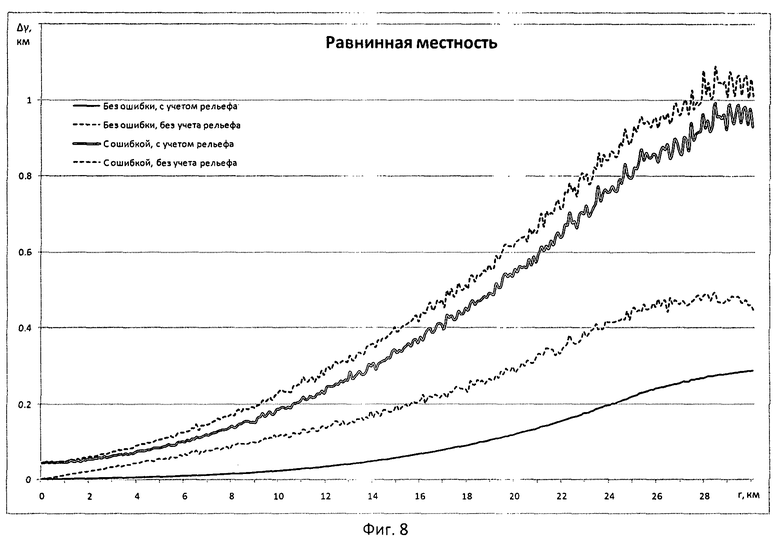


Изобретения относятся к радиотехнике и могут быть использованы для определения местоположения источников радиоизлучений (ИРИ) с летно-подъемного средства (ЛПС) угломерно-дальномерным способом. Достигаемым техническим результатом является повышение точности местоопределения ИРИ. Технический результат достигается тем, что учитывается ориентация антенной решетки пеленгатора относительно борта ЛПС, местоположение и собственная ориентация ЛПС в пространстве, а также особенности рельефа местности района измерений. В процессе работы одновременно с измерением пространственных параметров ИРИ: азимута θi и угла места βi оценивают местоположение ЛПС в пространстве, его ориентацию через угловые параметры: крен  , тангаж
, тангаж  и склонение
и склонение  , а также подстилающую поверхность с использованием цифровой карты района измерений. Указанный результат достигается также путем последовательного уточнения значения вектора направления
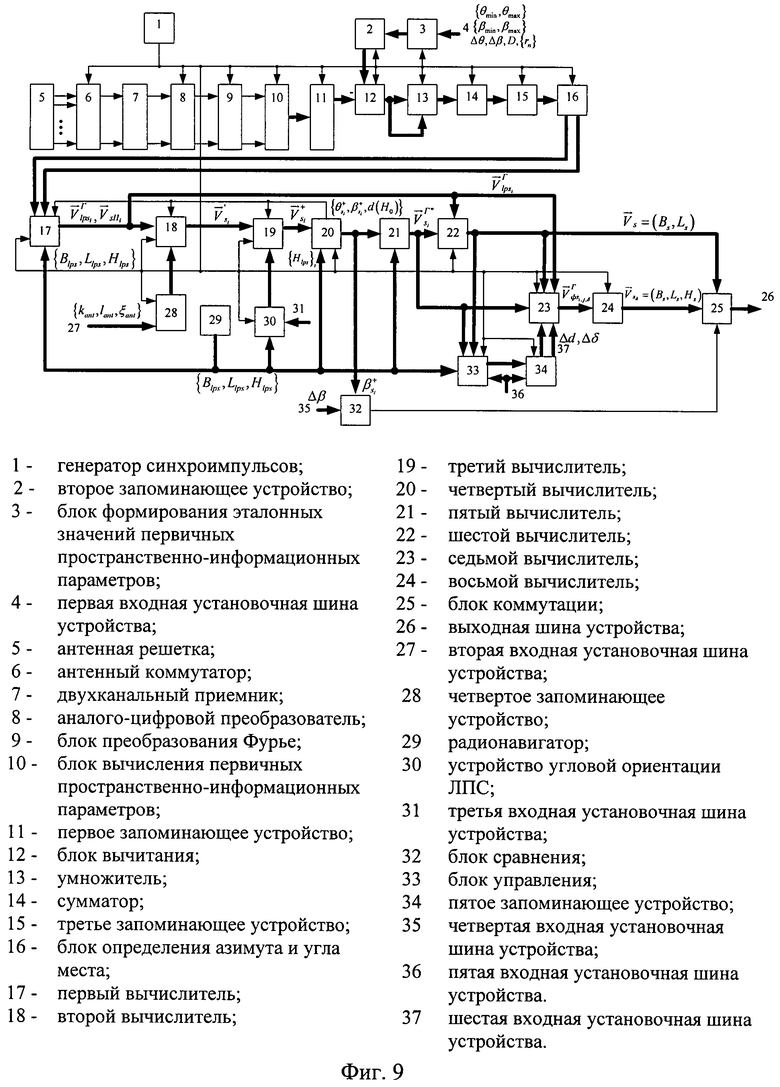
, а также подстилающую поверхность с использованием цифровой карты района измерений. Указанный результат достигается также путем последовательного уточнения значения вектора направления  на s-й ИРИ с одновременным переходом от одной системы координат к другой. Устройство определения координат ИРИ, реализующее способ, содержит двухканальный фазовый интерферометр, восемь вычислителей, пять запоминающих устройств, радионавигатор, устройство угловой ориентации ЛПС, блок управления, блок сравнения, блок коммутации, шесть входных установочных шин и выходную шину, определенным образом соединенные между собой. 2 н.п. ф-лы, 20 ил.
на s-й ИРИ с одновременным переходом от одной системы координат к другой. Устройство определения координат ИРИ, реализующее способ, содержит двухканальный фазовый интерферометр, восемь вычислителей, пять запоминающих устройств, радионавигатор, устройство угловой ориентации ЛПС, блок управления, блок сравнения, блок коммутации, шесть входных установочных шин и выходную шину, определенным образом соединенные между собой. 2 н.п. ф-лы, 20 ил.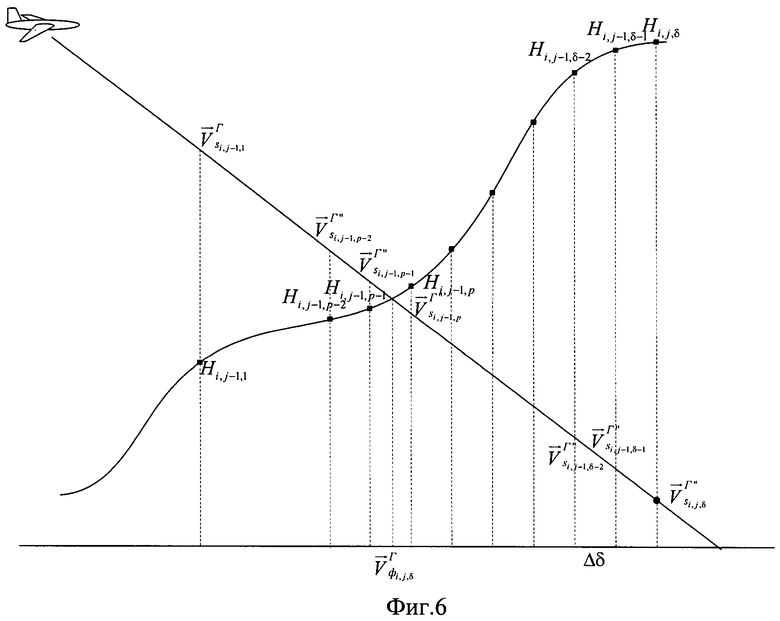
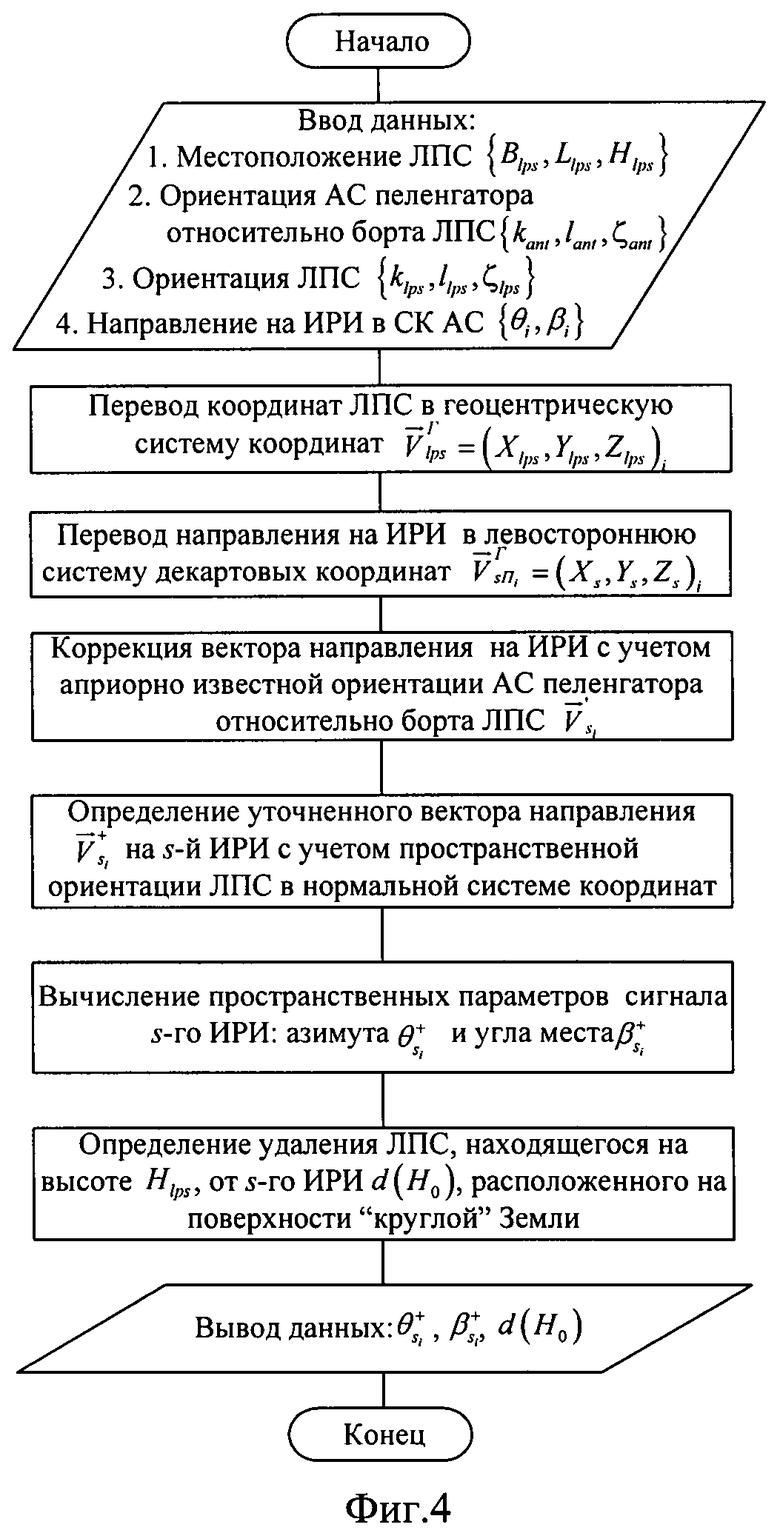
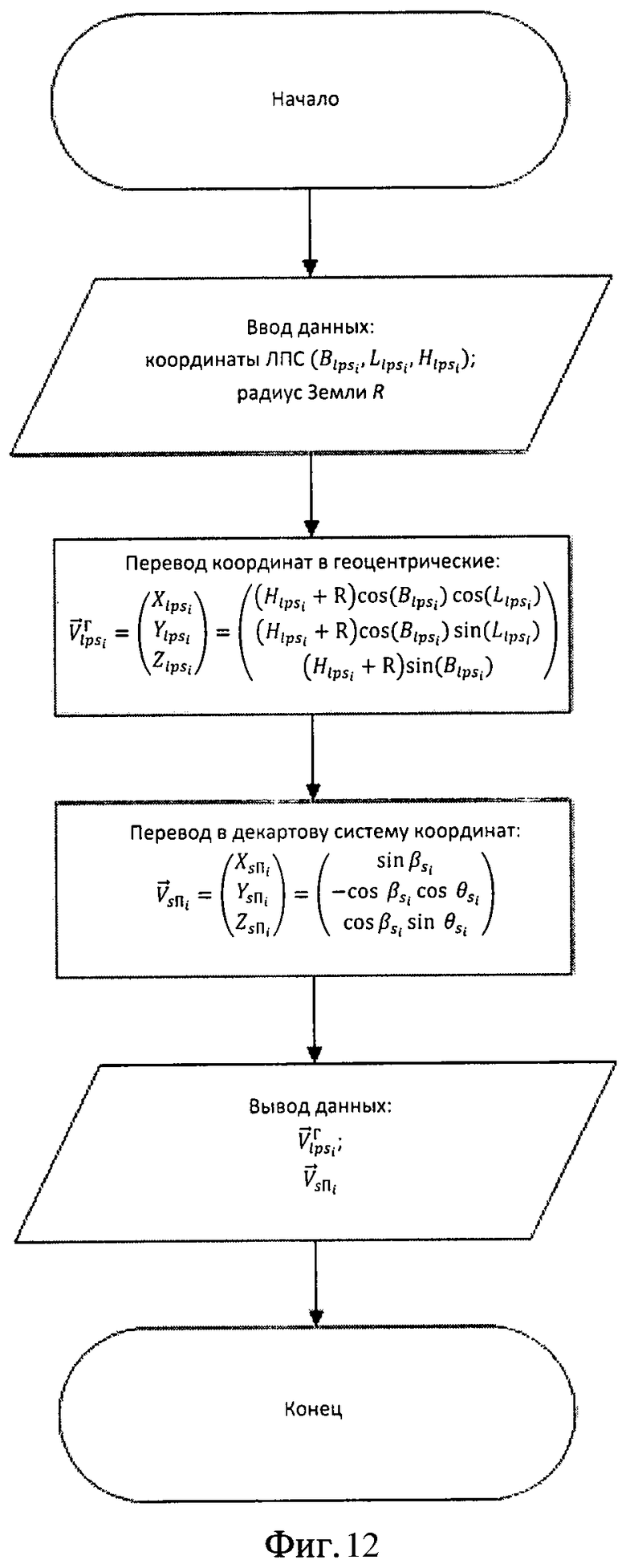
1. Способ определения координат источника радиоизлучения (ИРИ), заключающийся в том, что принимают сигналы ИРИ в заданной полосе частот ΔF перемещающимся в пространстве бортовым пеленгатором, установленным на летно-подъемном средстве (ЛПС), измеряют пространственно-информационные параметры обнаруженных сигналов: азимут θsi и угол места βsi в системе координат антенной системы с одновременным определением местоположения ЛПС  в момент времени ti, где βlps, Llps и Hlps - соответственно широта, долгота и высота ЛПС, отличающийся тем, что переводят координаты ЛПС
в момент времени ti, где βlps, Llps и Hlps - соответственно широта, долгота и высота ЛПС, отличающийся тем, что переводят координаты ЛПС  в геоцентрическую систему координат
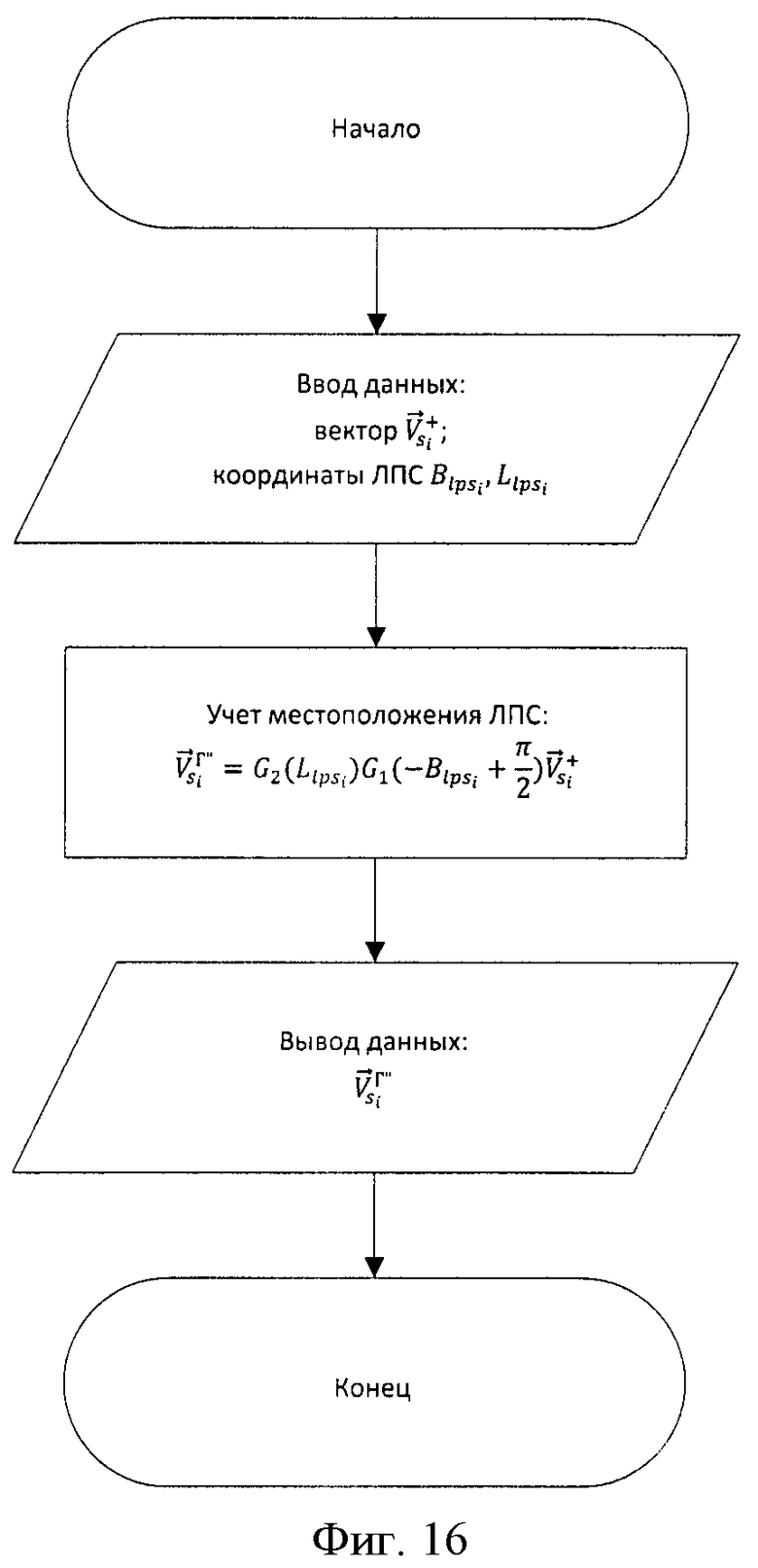
в геоцентрическую систему координат  а вектор направления на s-й ИРИ
а вектор направления на s-й ИРИ  в левостороннюю систему декартовых координат
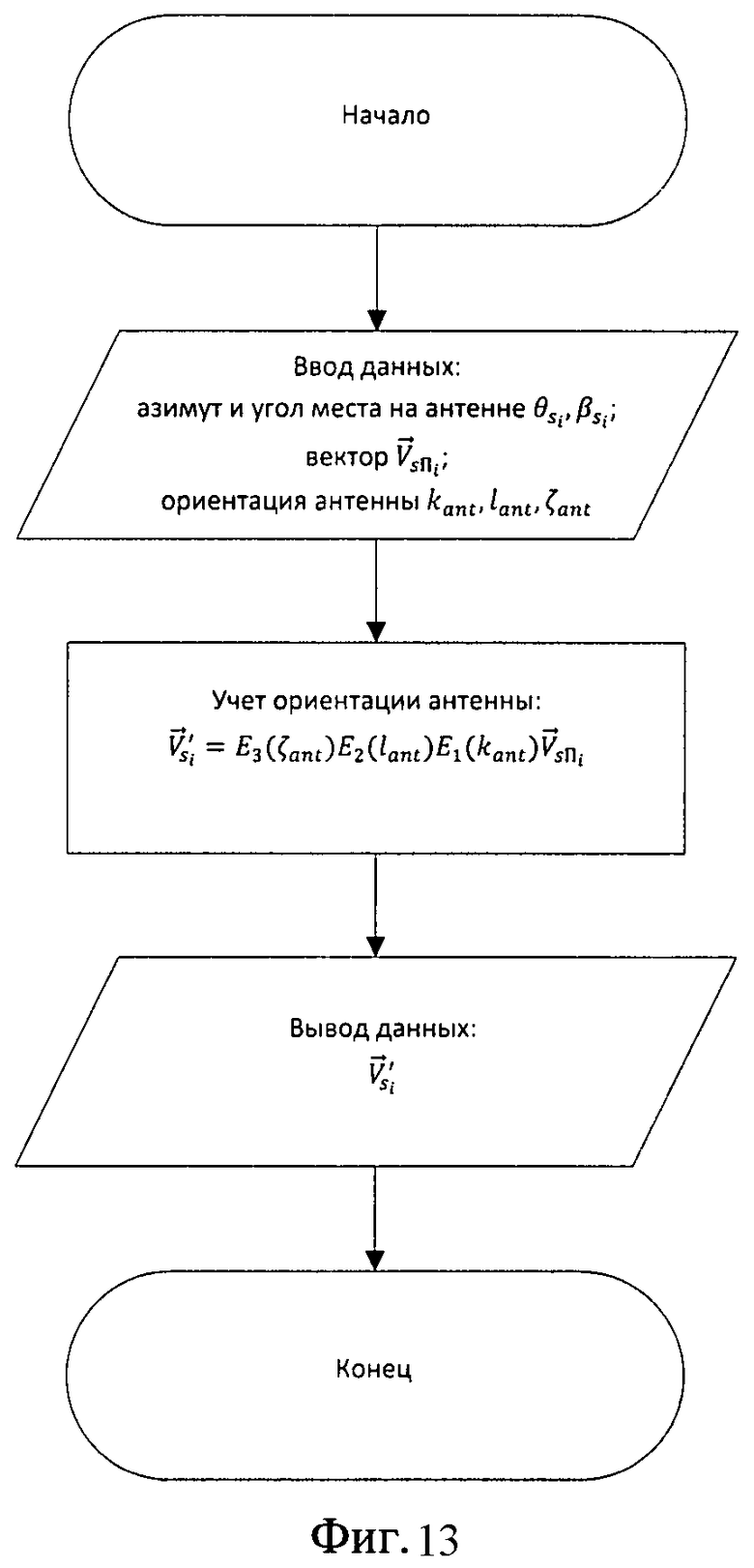
в левостороннюю систему декартовых координат  корректируют вектор направления на s-й ИРИ
корректируют вектор направления на s-й ИРИ  с учетом априорно известной ориентации антенной системы бортового пеленгатора относительно ЛПС {kant, lant, ζant}, где kant, lant, ζant - соответственно углы крена, тангажа и склонения антенной системы, путем последовательного умножения значений
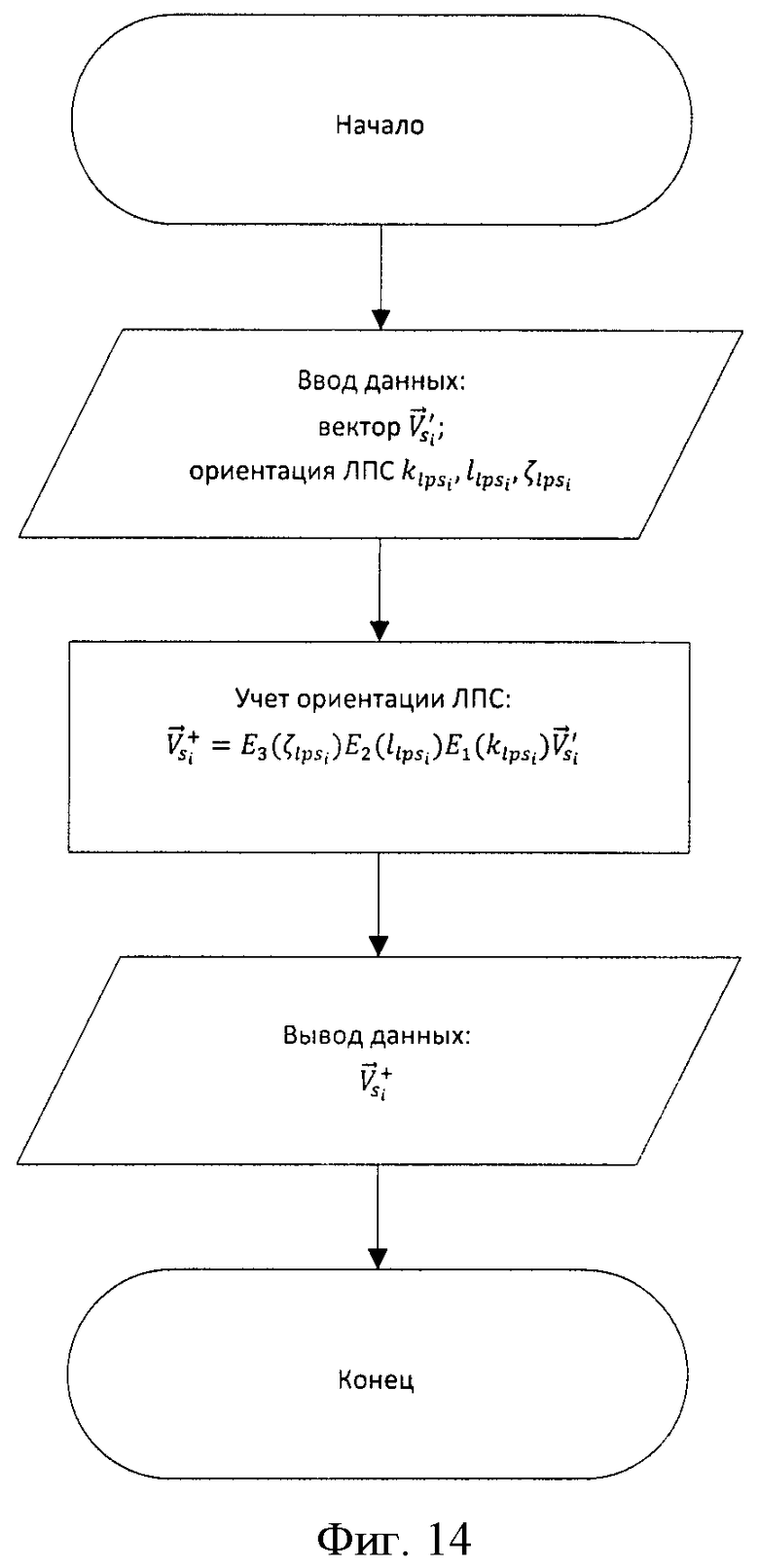
с учетом априорно известной ориентации антенной системы бортового пеленгатора относительно ЛПС {kant, lant, ζant}, где kant, lant, ζant - соответственно углы крена, тангажа и склонения антенной системы, путем последовательного умножения значений  на соответствующие углам Эйлера матрицы поворота, после чего в нормальной системе координат вычисляют уточненное значение вектора направления
на соответствующие углам Эйлера матрицы поворота, после чего в нормальной системе координат вычисляют уточненное значение вектора направления  на s-й ИРИ с учетом измеренных в момент времени ti пространственных углов ЛПС: крена
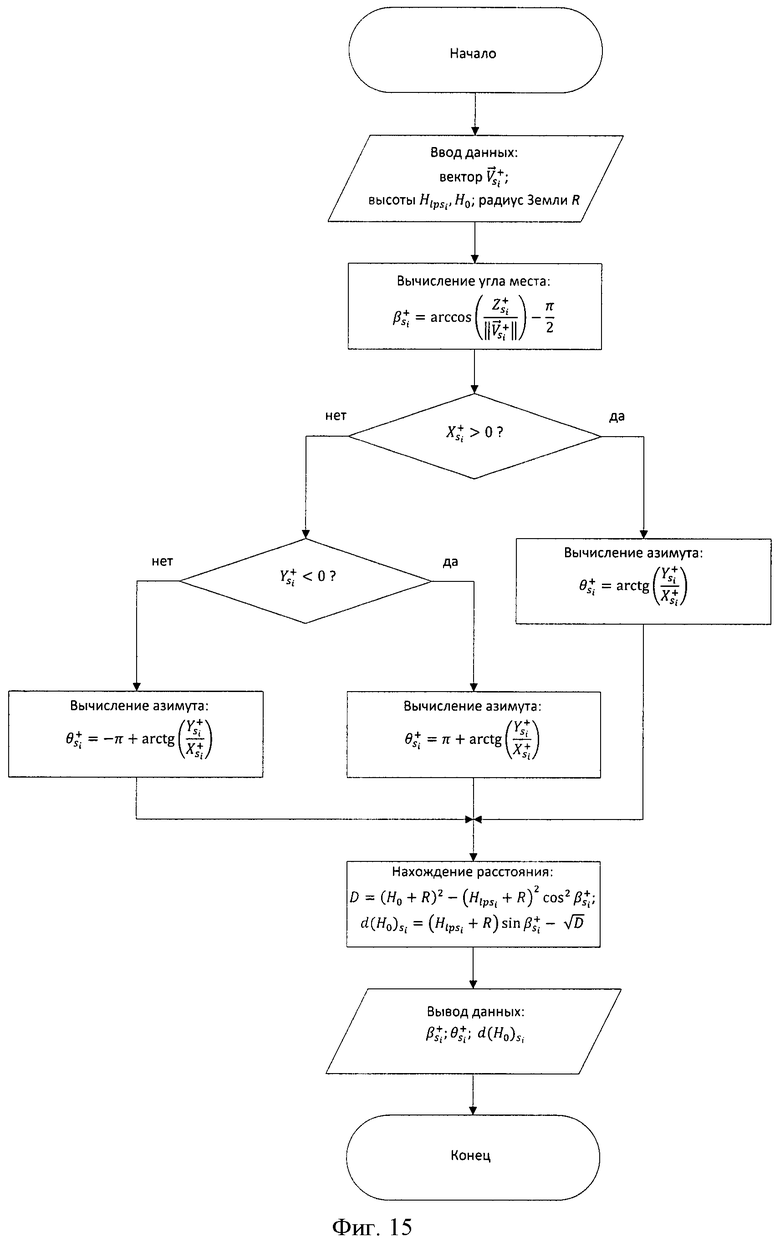
на s-й ИРИ с учетом измеренных в момент времени ti пространственных углов ЛПС: крена  тангажа и склонения определяют уточненные значения азимута
тангажа и склонения определяют уточненные значения азимута  угла места
угла места  и удаление ЛПС, находящегося в момент времени ti на высоте
и удаление ЛПС, находящегося в момент времени ti на высоте  от s-го ИРИ
от s-го ИРИ  расположенного на поверхности "круглой" Земли, в противном случае, при невозможности получения
расположенного на поверхности "круглой" Земли, в противном случае, при невозможности получения  начинают новый цикл измерений, в геоцентрической системе координат определяют значение истинного вектора направления на s-й ИРИ
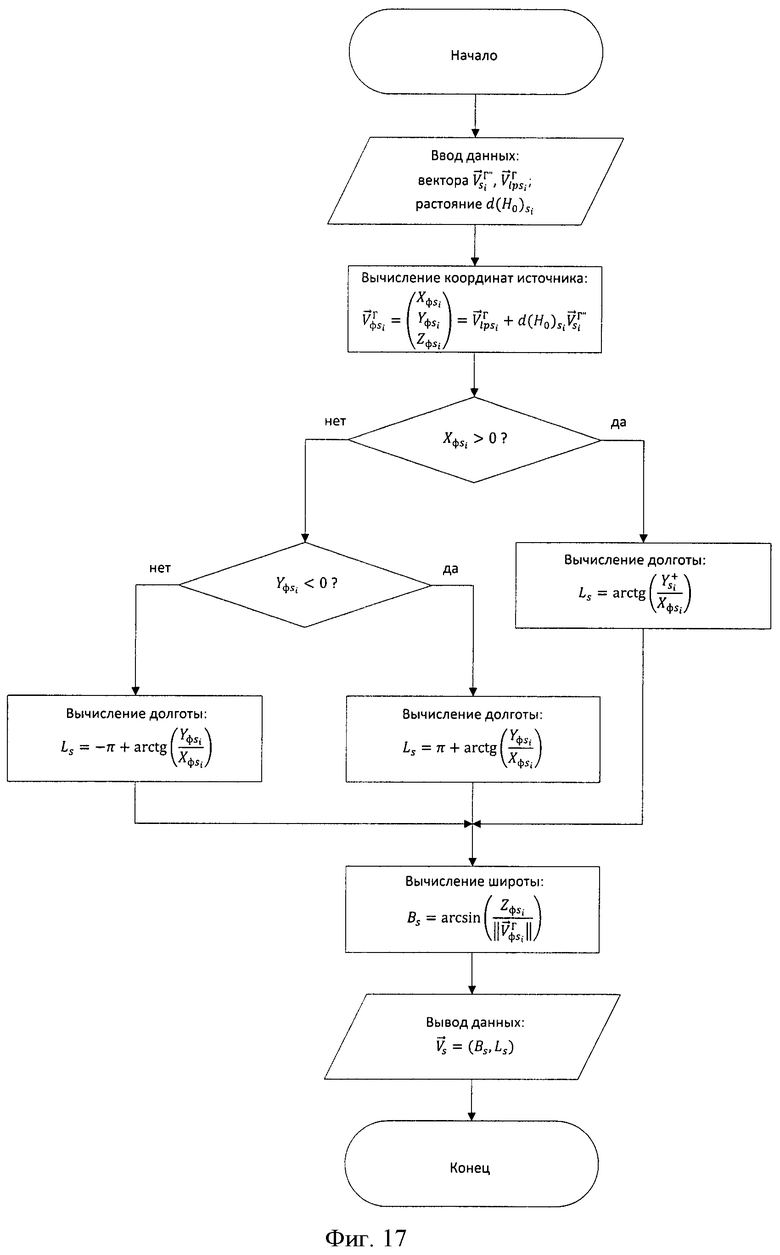
начинают новый цикл измерений, в геоцентрической системе координат определяют значение истинного вектора направления на s-й ИРИ  которое зависит от широты Blps и долготы Llps местоположения ЛПС, определяют координаты точки пересечения вектора
которое зависит от широты Blps и долготы Llps местоположения ЛПС, определяют координаты точки пересечения вектора  с "круглой" Землей
с "круглой" Землей  преобразуют геоцентрические координаты s-го ИРИ
преобразуют геоцентрические координаты s-го ИРИ  в географические
в географические  где Bs и Ls - соответственно широта и долгота s-го ИРИ, результаты вычислений уточненного угла места
где Bs и Ls - соответственно широта и долгота s-го ИРИ, результаты вычислений уточненного угла места  сравнивают с пороговым значением Δβ, определяющим заданную потенциальную точность измерения местоположения ИРИ, при невыполнении пороговых условии
сравнивают с пороговым значением Δβ, определяющим заданную потенциальную точность измерения местоположения ИРИ, при невыполнении пороговых условии  , а также при выполнении пороговых условии
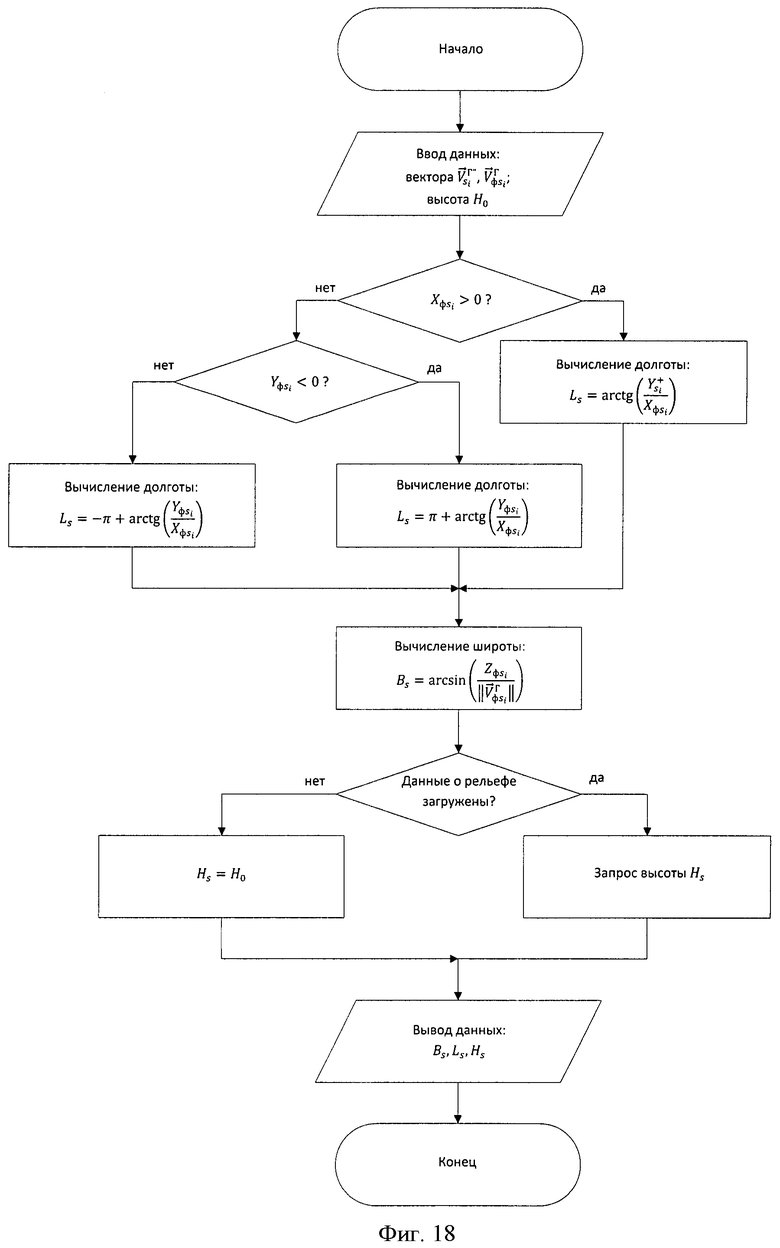
, а также при выполнении пороговых условии  и отсутствии цифровой карты рельефа местности района измерений, представляющей собой матрицу с заданной дискретностью по координатам района измерений с соответствующими значениями высот рельефа, в качестве координат s-го ИРИ используют значение
и отсутствии цифровой карты рельефа местности района измерений, представляющей собой матрицу с заданной дискретностью по координатам района измерений с соответствующими значениями высот рельефа, в качестве координат s-го ИРИ используют значение  при выполнении пороговых условий
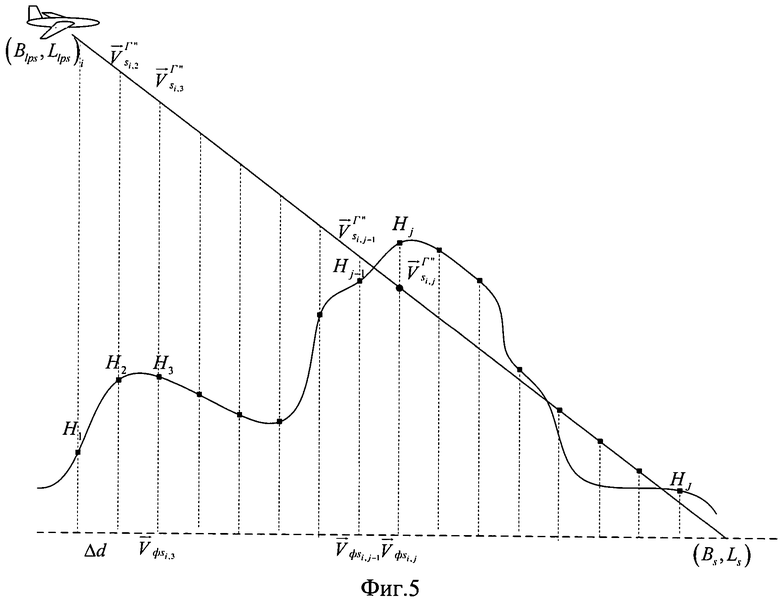
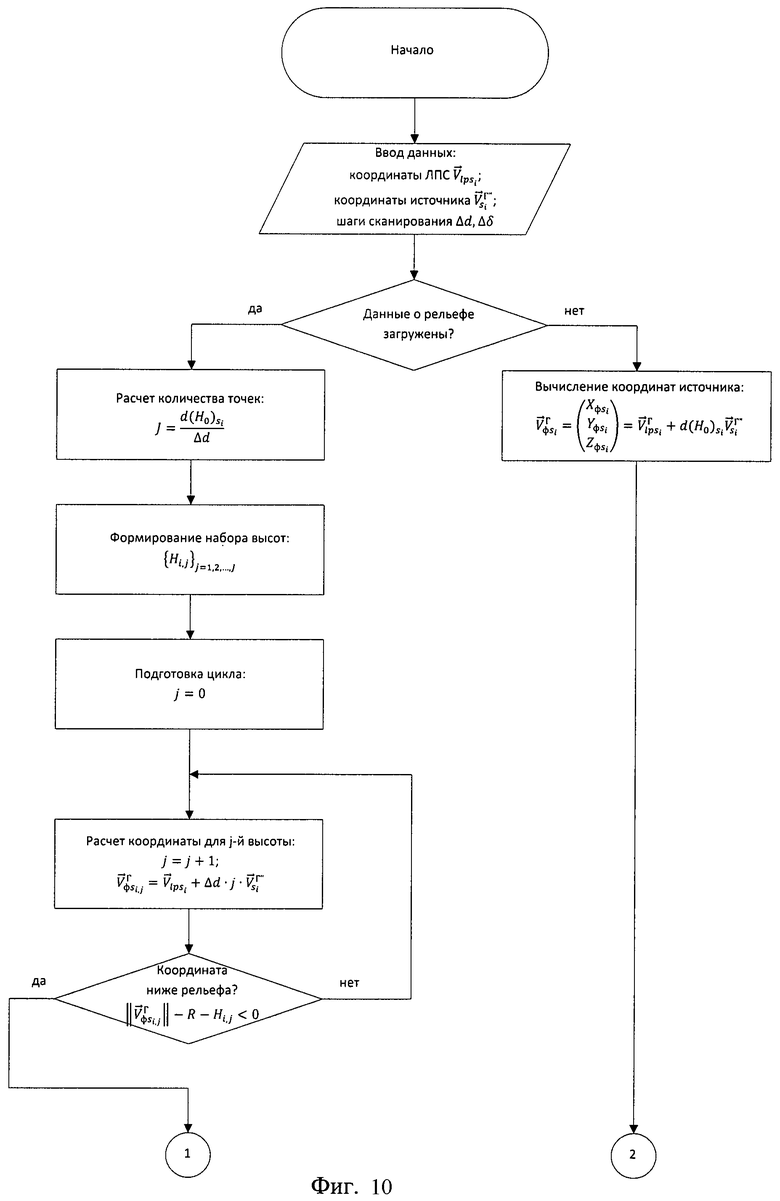
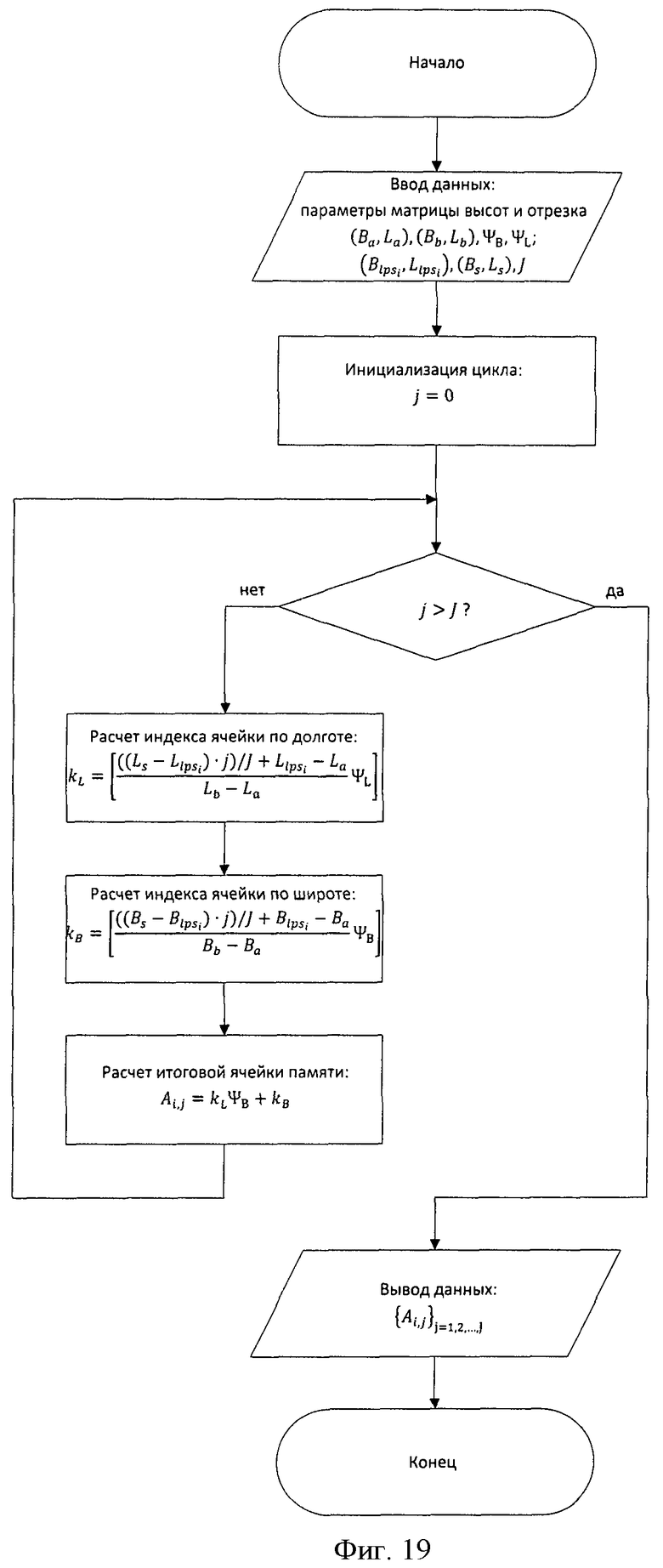
при выполнении пороговых условий  и наличии цифровой карты рельефа района измерений формируют последовательный набор значений высот {Hi,j}, j=1, 2, …, J, который соответствует равномерно распределенным координатам на отрезке, соединяющем координаты
и наличии цифровой карты рельефа района измерений формируют последовательный набор значений высот {Hi,j}, j=1, 2, …, J, который соответствует равномерно распределенным координатам на отрезке, соединяющем координаты  и
и  J=d(H0)/Δd, где Δd - шаг сканирования по вектору направления
J=d(H0)/Δd, где Δd - шаг сканирования по вектору направления  на s-й ИРИ, определяется заданной точностью предварительного измерения координат ИРИ, рассчитывают координаты
на s-й ИРИ, определяется заданной точностью предварительного измерения координат ИРИ, рассчитывают координаты  соответствующие дискретно выделенным высотам рельефа местности Hi,j, а за предварительные координаты s-го ИРИ
соответствующие дискретно выделенным высотам рельефа местности Hi,j, а за предварительные координаты s-го ИРИ  принимают первую точку разбиения вектора
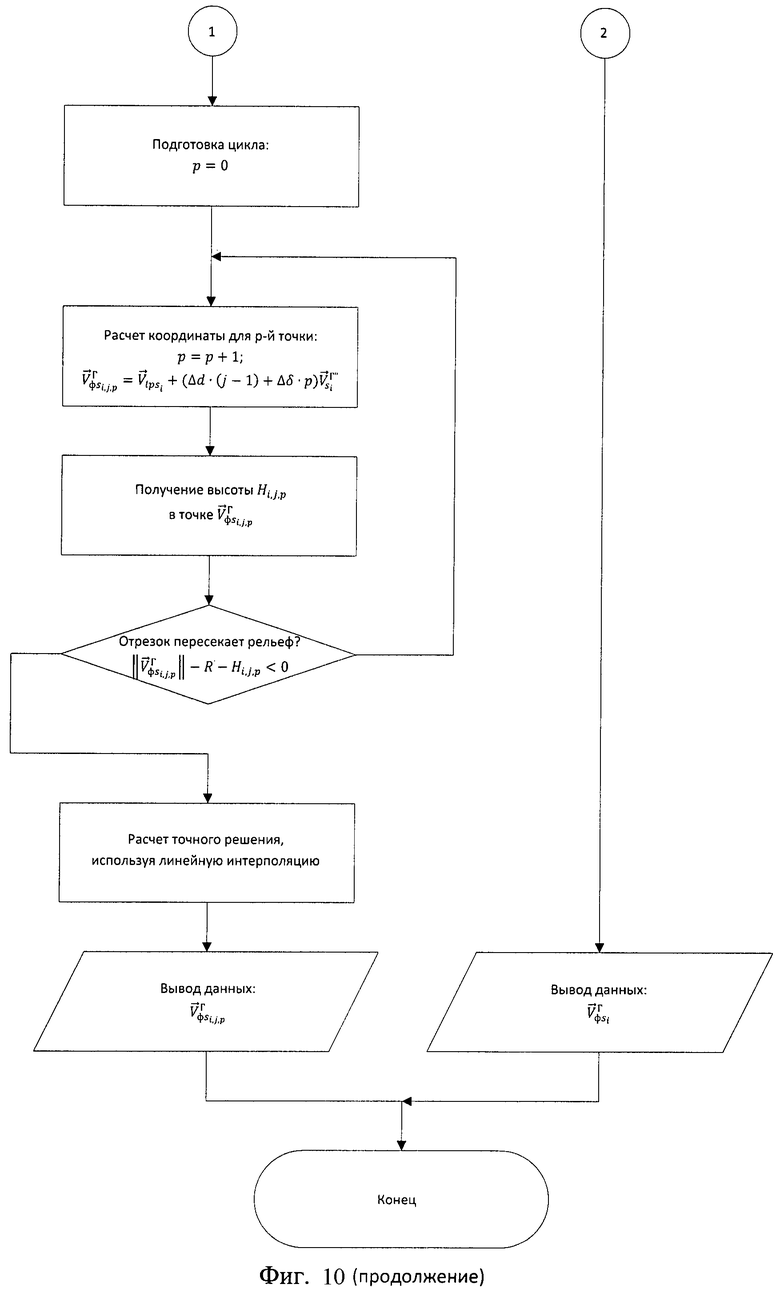
принимают первую точку разбиения вектора  находящуюся ниже уровня рельефа местности, уточняют местоположение s-го ИРИ путем выделения соседней точки разбиения
находящуюся ниже уровня рельефа местности, уточняют местоположение s-го ИРИ путем выделения соседней точки разбиения  находящейся над рельефом местности, отрезок
находящейся над рельефом местности, отрезок  вектора направления на s-й ИРИ
вектора направления на s-й ИРИ  делят на δ равных интервалов, Δδ<<Δd, где Δδ - шаг сканирования по выделенному отрезку вектора направления
делят на δ равных интервалов, Δδ<<Δd, где Δδ - шаг сканирования по выделенному отрезку вектора направления  и определяется конечной заданной точность измерения координат ИРИ, для назначенных точек вычисляют координаты
и определяется конечной заданной точность измерения координат ИРИ, для назначенных точек вычисляют координаты  и соответствующие им значения высот рельефа местности Hi,j,δ, за точные координаты s-го ИРИ принимают значение
и соответствующие им значения высот рельефа местности Hi,j,δ, за точные координаты s-го ИРИ принимают значение  находящееся между соседними точками, расположенными выше или ниже рельефа местности, а полученное значение координат s-го ИРИ
находящееся между соседними точками, расположенными выше или ниже рельефа местности, а полученное значение координат s-го ИРИ  преобразуют в удобную географическую систему координат
преобразуют в удобную географическую систему координат 
2. Устройство определения координат источника радиоизлучения (ИРИ), содержащее антенную решетку, выполненную из N>2 идентичных антенных элементов, расположенных в плоскости пеленгования, антенный коммутатор, N входов которого подключены к соответствующим N выходам антенной решетки, а сигнальный и опорный выходы коммутатора подключены соответственно к сигнальному и опорному входам двухканального приемника, выполненного по схеме с общими гетеродинами, аналого-цифровой преобразователь, выполненный двухканальным соответственно с сигнальным и опорным каналами, причем сигнальный и опорный выходы промежуточной частоты двухканального приемника соединены соответственно с сигнальным и опорным входами аналого-цифрового преобразователя, блок преобразования Фурье, выполненный двухканальным соответственно с сигнальным и опорным каналами, сигнальный и опорный входы которого соединены соответственно с сигнальным и опорным выходами аналого-цифрового преобразователя, первое и второе запоминающие устройства, блок вычитания, блок формирования эталонных значений первичных пространственно-информационных параметров (ППИП), блок вычисления ППИП, первый информационный вход которого соединен с сигнальным выходом блока преобразования Фурье, а второй информационный вход - с опорным выходом блока преобразования Фурье, группа информационных выходов блока вычисления ППИП соединена с группой информационных входов первого запоминающего устройства, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания, группа входов уменьшаемого которого соединена с группой информационных выходов второго запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов блока формирования эталонных значений ППИП, группа информационных входов которого является первой входной установочной шиной устройства определения координат ИРИ, последовательно соединенные умножитель, сумматор, третье запоминающее устройство, блок определения азимута и угла места, причем первая и вторая группы информационных входов умножителя объединены поразрядно и соединены с группой информационных выходов блока вычитания, генератор синхроимпульсов, выход которого соединен с управляющим входом антенного коммутатора, входами синхронизации аналого-цифрового преобразователя, блока преобразования Фурье, первого, второго и третьего запоминающих устройств, блока вычитания, умножителя, сумматора, блока определения азимута и угла места, блока формирования эталонных значений ППИП и блока вычисления ППИП, отличающееся тем, что дополнительно введены первый вычислитель, предназначенный для перевода пространственных параметров летно-подъемного средства (ЛПС)  в геоцентрическую систему координат
в геоцентрическую систему координат  а вектора направления на s-й ИРИ
а вектора направления на s-й ИРИ  - в левостороннюю систему декартовых координат
- в левостороннюю систему декартовых координат  второй вычислитель, предназначенный для коррекции вектора направления на s-й ИРИ с учетом априорно известной ориентации антенной системы бортового пеленгатора
второй вычислитель, предназначенный для коррекции вектора направления на s-й ИРИ с учетом априорно известной ориентации антенной системы бортового пеленгатора  третий вычислитель, предназначенный для вычисления в нормальной системе координат уточненного вектора направления
третий вычислитель, предназначенный для вычисления в нормальной системе координат уточненного вектора направления  на s-й ИРИ с учетом измеренных в момент времени ti пространственных углов ЛПС, четвертый вычислитель, предназначенный для вычисления значений азимутального угла
на s-й ИРИ с учетом измеренных в момент времени ti пространственных углов ЛПС, четвертый вычислитель, предназначенный для вычисления значений азимутального угла  угла места
угла места  и удаления s-го ИРИ от ЛПС d(H0), пятый вычислитель, предназначенный для определения в геоцентрической системе координат значения истинного вектора направления на s-й ИРИ
и удаления s-го ИРИ от ЛПС d(H0), пятый вычислитель, предназначенный для определения в геоцентрической системе координат значения истинного вектора направления на s-й ИРИ  величина которого зависит от широты Blps и долготы Llps местоположения ЛПС, шестой вычислитель, предназначенный для определения координат точки пересечения вектора с "круглой" Землей
величина которого зависит от широты Blps и долготы Llps местоположения ЛПС, шестой вычислитель, предназначенный для определения координат точки пересечения вектора с "круглой" Землей  и преобразования геоцентрических координат s-го ИРИ
и преобразования геоцентрических координат s-го ИРИ  в географические
в географические  седьмой вычислитель, предназначенный для нахождения координат s-го ИРИ с заданной точностью
седьмой вычислитель, предназначенный для нахождения координат s-го ИРИ с заданной точностью  восьмой вычислитель, предназначенный для преобразования геоцентрических координат s-го ИРИ
восьмой вычислитель, предназначенный для преобразования геоцентрических координат s-го ИРИ  в географические
в географические  блок управления, предназначенный для преобразования части вектора
блок управления, предназначенный для преобразования части вектора  ограниченного точками и
ограниченного точками и  в соответствующую линейку адресов {Ai,j,δ} высот {Hi,j,δ} рельефа местности, блок коммутации, четвертое и пятое запоминающие устройства, радионавигатор, вторая, третья, четвертая, пятая и шестая входные установочные шины устройства определения координат ИРИ, блок сравнения и устройство угловой ориентации ЛПС, предназначенное для измерения углов крена
в соответствующую линейку адресов {Ai,j,δ} высот {Hi,j,δ} рельефа местности, блок коммутации, четвертое и пятое запоминающие устройства, радионавигатор, вторая, третья, четвертая, пятая и шестая входные установочные шины устройства определения координат ИРИ, блок сравнения и устройство угловой ориентации ЛПС, предназначенное для измерения углов крена  тангажа
тангажа  и склонения
и склонения  ЛПС, причем первый, второй, третий, четвертый, пятый и шестой вычислители подключены последовательно, первая и вторая группы информационных входов первого вычислителя соединены соответственно с первой и второй группами информационных выходов блока определения азимута и угла места, третья группа информационных входов первого вычислителя объединена со вторыми группами информационных входов четвертого и пятого вычислителей, первыми группами информационных входов устройства угловой ориентации ЛПС и блока управления и группой информационных выходов радионавигатора, последовательно соединены седьмой вычислитель, восьмой вычислитель и блок коммутации, группа информационных выходов которого является выходной шиной устройства определения координат ИРИ, а вторая группа информационных входов блока коммутации объединена с группой информационных выходов шестого вычислителя, третьей группой информационных входов блока управления и первой группой информационных входов седьмого вычислителя, вторая группа информационных входов которого соединена с группой информационных выходов пятого вычислителя и второй группой информационных входов блока управления, четвертая группа информационных входов является шестой установочной шиной устройства определения координат ИРИ, пятая группа информационных входов объединена со второй группой информационных входов шестого вычислителя и группой информационных выходов первого вычислителя, а третья группа информационных входов седьмого вычислителя соединена с группой информационных выходов пятого запоминающего устройства, группа адресных входов которого соединена с группой адресных выходов блока управления, а группа информационных входов объединена с четвертой группой информационных входов блока управления и является пятой входной установочной шиной устройства определения координат ИРИ, вторая входная установочная шина которого соединена с группой информационных входов четвертого запоминающего устройства, группа информационных выходов которого соединена с второй группой информационных входов второго вычислителя, вход синхронизации которого объединен с выходом генератора синхроимпульсов и со входами синхронизации первого, третьего, четвертого, пятого, шестого, седьмого и восьмого вычислителей, четвертого и пятого запоминающих устройств, блока управления и устройства угловой ориентации ЛПС, первая группа информационных выходов которого соединена со второй группой информационных входов третьего вычислителя, а вторая группа информационных входов является третьей входной установочной шиной устройства определения координат ИРИ, четвертая входная установочная шина которого соединена со второй группой информационных входов блока сравнения, выход которого соединен со входом управления блока коммутации, а первая группа информационных входов соединена с группой информационных выходов четвертого вычислителя, выход обнуления которого соединен со входами обнуления первого, второго и третьего вычислителей.
ЛПС, причем первый, второй, третий, четвертый, пятый и шестой вычислители подключены последовательно, первая и вторая группы информационных входов первого вычислителя соединены соответственно с первой и второй группами информационных выходов блока определения азимута и угла места, третья группа информационных входов первого вычислителя объединена со вторыми группами информационных входов четвертого и пятого вычислителей, первыми группами информационных входов устройства угловой ориентации ЛПС и блока управления и группой информационных выходов радионавигатора, последовательно соединены седьмой вычислитель, восьмой вычислитель и блок коммутации, группа информационных выходов которого является выходной шиной устройства определения координат ИРИ, а вторая группа информационных входов блока коммутации объединена с группой информационных выходов шестого вычислителя, третьей группой информационных входов блока управления и первой группой информационных входов седьмого вычислителя, вторая группа информационных входов которого соединена с группой информационных выходов пятого вычислителя и второй группой информационных входов блока управления, четвертая группа информационных входов является шестой установочной шиной устройства определения координат ИРИ, пятая группа информационных входов объединена со второй группой информационных входов шестого вычислителя и группой информационных выходов первого вычислителя, а третья группа информационных входов седьмого вычислителя соединена с группой информационных выходов пятого запоминающего устройства, группа адресных входов которого соединена с группой адресных выходов блока управления, а группа информационных входов объединена с четвертой группой информационных входов блока управления и является пятой входной установочной шиной устройства определения координат ИРИ, вторая входная установочная шина которого соединена с группой информационных входов четвертого запоминающего устройства, группа информационных выходов которого соединена с второй группой информационных входов второго вычислителя, вход синхронизации которого объединен с выходом генератора синхроимпульсов и со входами синхронизации первого, третьего, четвертого, пятого, шестого, седьмого и восьмого вычислителей, четвертого и пятого запоминающих устройств, блока управления и устройства угловой ориентации ЛПС, первая группа информационных выходов которого соединена со второй группой информационных входов третьего вычислителя, а вторая группа информационных входов является третьей входной установочной шиной устройства определения координат ИРИ, четвертая входная установочная шина которого соединена со второй группой информационных входов блока сравнения, выход которого соединен со входом управления блока коммутации, а первая группа информационных входов соединена с группой информационных выходов четвертого вычислителя, выход обнуления которого соединен со входами обнуления первого, второго и третьего вычислителей.
| BARON A.R | |||
| et al | |||
| Passive Direction Finding and Signal Location | |||
| Microwave J., 1982, v.25, 9, p.59-76 | |||
| RU 2005102257 A, 10.07.2006 | |||
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И МНОГОКАНАЛЬНЫЙ ПЕЛЕНГАТОР | 1999 |
|
RU2144200C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2201599C1 |
| US 20020190902 A1, 19.12.2002 | |||
| СПОСОБ УДАЛЕНИЯ ЭПИРЕТИНАЛЬНОЙ МЕМБРАНЫ | 1996 |
|
RU2140238C1 |

