Изобретения объединены одним изобретательским замыслом, относится к радиотехнике и могут быть использованы в навигационных, пеленгационных, локационных технических средствах для определения местоположения априорно неизвестного источников радиоизлучения (ИРИ) с летно-подъемного средства (ЛПС).
Известен способ определения координат ИРИ (см. Пат. РФ №2283505, МПК G01S 13/46, опубл. 10.09.2006 г.). Он заключается в приеме сигналов ИРИ в заданной полосе частот ΔF перемещающимися в пространстве пеленгатором, измерении первичных пространственно-информационных параметров (ППИП) обнаруженных сигналов с одновременным измерением и запоминанием вторичных параметров: координат местоположения пеленгатора и пространственной ориентации его антенной решетки, при этом на подготовительном этапе рассчитывают и запоминают эталонные значения первичных пространственно-информационных параметров на выходах антенных элементов антенной решетки пеленгатора, находят разность между эталонными и измеренными значениями ППИП, особым способом формируют матрицу измерений, после нескольких итераций по минимальному элементу матрицы принимают решение о координатах ИРИ.
Аналог позволяет повысить точность определения координат за счет использования одноэтапной обработки ППИП. В качестве недостатков следует отметить следующее. Ему присущи большие временные затраты на решение поставленной задачи. Кроме того, в связи с тем, что подвижный пеленгатор находится на поверхности земли, в УКВ-СВЧ-диапазонах волн он сохраняет свою работоспособность в ограниченном районе в силу особенностей распространения радиоволн.
Известны различные реализации триангуляционного способа местоопределения ИРИ на ЛПС (см. Южаков В.В. Современные методы определения местоположения источников электромагнитного излучения // Зарубежная радиоэлектроника, №8, стр. 67-79). В предлагаемых вариантах реализации триангуляционного способа местоопределения измеряют азимут θ на ИРИ, а систематические ошибки в измерениях частично устраняют путем использования особенностей различных траекторий полета ЛПС.
Основные недостатки способов-аналогов:
относительно низкая точность определения местоположения ИРИ в связи с тем, что в точках измерения θ не учитывают такие важные параметры положения ЛПС, как крен  , тангаж
, тангаж  и склонение
и склонение  ;
;
не учитывается сферическая форма поверхности земли;
имеют место ограничения на маршрут полета ЛПС.
Наиболее близким по своей технической сущности к заявленному способу является способ определения координат источника радиоизлучения (см. Пат. РФ №2458360, МПК G01S 13/46, G01S 5/02 и G01S 3/14, опубл. 10.08.2012 г.)
Он заключается в том, что принимают сигналы ИРИ в заданной полосе частот ΔF перемещающимся в пространстве бортовым пеленгатором, установленным на летно-подъемном средстве, измеряют пространственно-информационные параметры обнаруженных сигналов: азимут  и угол места
и угол места  в системе координат антенной системы с одновременным определением местоположения ЛПС
в системе координат антенной системы с одновременным определением местоположения ЛПС  в момент времени ti, где
в момент времени ti, где  ,
,  ,
,  - соответственно широта, долгота и высота ЛПС, переводят координаты ЛПС
- соответственно широта, долгота и высота ЛПС, переводят координаты ЛПС  в геоцентрическую систему координат
в геоцентрическую систему координат  , а вектор направления на s-й ИРИ
, а вектор направления на s-й ИРИ  - в левостороннюю систему декартовых координат
- в левостороннюю систему декартовых координат  , корректируют вектор направления на s-й ИРИ
, корректируют вектор направления на s-й ИРИ  с учетом априорно известной ориентации антенной системы бортового пеленгатора относительно ЛПС {kant,
с учетом априорно известной ориентации антенной системы бортового пеленгатора относительно ЛПС {kant,  , ζant}, где kant,
, ζant}, где kant,  , ζant - соответственно углы крена, тангажа и склонения антенной системы, путем последовательного умножения значений
, ζant - соответственно углы крена, тангажа и склонения антенной системы, путем последовательного умножения значений  на соответствующие углам Эйлера матрицы поворота, после чего в нормальной системе координат вычисляют уточненное значение вектора направления
на соответствующие углам Эйлера матрицы поворота, после чего в нормальной системе координат вычисляют уточненное значение вектора направления  на s-й ИРИ с учетом измеренных в момент времени ti пространственных углов ЛПС: крена
на s-й ИРИ с учетом измеренных в момент времени ti пространственных углов ЛПС: крена  , тангажа
, тангажа  и склонения
и склонения  , определяют уточненные значения азимута
, определяют уточненные значения азимута  , угла места
, угла места  и удаление ЛПС, находящегося в момент времени ti на высоте
и удаление ЛПС, находящегося в момент времени ti на высоте  , от s-го ИРИ
, от s-го ИРИ  , расположенного на поверхности «круглой» Земли, в противном случае, при невозможности получения
, расположенного на поверхности «круглой» Земли, в противном случае, при невозможности получения  начинают новый цикл измерений, в геоцентрической системе координат определяют значение истинного вектора направления на s-й ИРИ
начинают новый цикл измерений, в геоцентрической системе координат определяют значение истинного вектора направления на s-й ИРИ  которое зависит от широты
которое зависит от широты  и долготы
и долготы  местоположения ЛПС, определяют координаты точки пересечения вектора
местоположения ЛПС, определяют координаты точки пересечения вектора  с «круглой» Землей
с «круглой» Землей  , преобразуют геоцентрические координаты s-го ИРИ
, преобразуют геоцентрические координаты s-го ИРИ  в географические
в географические  , где βs и Ls - соответственно широта и долгота s-го ИРИ, результаты вычислений уточненного угла места
, где βs и Ls - соответственно широта и долгота s-го ИРИ, результаты вычислений уточненного угла места  сравнивают с пороговым значением Δβ определяющим заданную потенциальную точность измерения местоположения ИРИ, при невыполнении пороговых условии
сравнивают с пороговым значением Δβ определяющим заданную потенциальную точность измерения местоположения ИРИ, при невыполнении пороговых условии  , а также при выполнении пороговых условии
, а также при выполнении пороговых условии  и отсутствии цифровой карты рельефа местности района измерений, представляющей собой матрицу с заданной дискретностью по координатам района измерений с соответствующими значениями высот рельефа, в качестве координат s-го ИРИ используют значение
и отсутствии цифровой карты рельефа местности района измерений, представляющей собой матрицу с заданной дискретностью по координатам района измерений с соответствующими значениями высот рельефа, в качестве координат s-го ИРИ используют значение  , при выполнении пороговых условий
, при выполнении пороговых условий  и наличии цифровой карты рельефа района измерений формируют последовательный набор значений высот {Hi,j}, j=1, 2, …, J, который соответствует равномерно распределенным координатам на отрезке, соединяющем координаты
и наличии цифровой карты рельефа района измерений формируют последовательный набор значений высот {Hi,j}, j=1, 2, …, J, который соответствует равномерно распределенным координатам на отрезке, соединяющем координаты  ,
,  и
и  ,
,  , J=d(H0)/Δd, где Δd - шаг сканирования по вектору направления
, J=d(H0)/Δd, где Δd - шаг сканирования по вектору направления  на s-й ИРИ, определяется заданной точностью предварительного измерения координат ИРИ, рассчитывают координаты
на s-й ИРИ, определяется заданной точностью предварительного измерения координат ИРИ, рассчитывают координаты  , соответствующие дискретно выделенным высотам рельефа местности Hij, а за предварительные координаты s-го ИРИ
, соответствующие дискретно выделенным высотам рельефа местности Hij, а за предварительные координаты s-го ИРИ  принимают первую точку разбиения вектора
принимают первую точку разбиения вектора  , находящуюся ниже уровня рельефа местности, уточняют местоположение s-го ИРИ путем выделения соседней точки разбиения
, находящуюся ниже уровня рельефа местности, уточняют местоположение s-го ИРИ путем выделения соседней точки разбиения  , находящейся над рельефом местности, отрезок
, находящейся над рельефом местности, отрезок  ,
,  вектора направления на s-й ИРИ
вектора направления на s-й ИРИ  делят на δ равных интервалов, Δδ<<Δd, где Δδ - шаг сканирования по выделенному отрезку вектора направления
делят на δ равных интервалов, Δδ<<Δd, где Δδ - шаг сканирования по выделенному отрезку вектора направления  и определяется конечной заданной точность измерения координат ИРИ, для назначенных точек вычисляют координаты
и определяется конечной заданной точность измерения координат ИРИ, для назначенных точек вычисляют координаты  и соответствующие им значения высот рельефа местности
и соответствующие им значения высот рельефа местности  , за точные координаты s-го ИРИ принимают значение
, за точные координаты s-го ИРИ принимают значение  , находящееся между соседними точками, расположенными выше или ниже рельефа местности, а полученное значение координат s-го ИРИ
, находящееся между соседними точками, расположенными выше или ниже рельефа местности, а полученное значение координат s-го ИРИ  преобразуют в удобную географическую систему координат
преобразуют в удобную географическую систему координат  .
.
Способ-прототип обеспечивает повышение точности измерения координат ИРИ с борта ЛПС путем более полного учета пространственной ориентации антенной решетки измерителя и особенностей рельефа местности.
Однако прототипу присущ недостаток, связанный с большими временными затратами на определение координат.
Наиболее близким по своей технической сущности к заявленному устройству определения координат ИРИ является устройство по пат. РФ №2458360, G01S 13/46, -5/02 и -3/14, опубл. 10.08.2012 г., бюл. №22.
Устройство-прототип содержит антенную решетку, выполненную из N>2 идентичных антенных элементов, расположенных в плоскости пеленгования, антенный коммутатор, N входов которого подключены к соответствующим N выходам антенной решетки, а сигнальный и опорный выходы коммутатора подключены соответственно к сигнальному и опорному входам двухканального приемника, выполненного по схеме с общими гетеродинами, аналого-цифровой преобразователь, выполненный двухканальным соответственно с сигнальным и опорным каналами, причем сигнальный и опорный выходы промежуточной частоты двухканального приемника соединены соответственно с сигнальным и опорным входами аналого-цифрового преобразователя, блок преобразования Фурье, выполненный двухканальным соответственно с сигнальным и опорным каналами, сигнальный и опорный входы которого соединены соответственно с сигнальным и опорным выходами аналого-цифрового преобразователя, первое и второе запоминающие устройства, блок вычитания, блок формирования эталонных значений первичных пространственно-информационных параметров (ППИП), блок вычисления ППИП, первый информационный вход которого соединен с сигнальным выходом блока преобразования Фурье, а второй информационный вход - с опорным выходом блока преобразования Фурье, группа информационных выходов блока вычисления ППИП соединена с группой информационных входов первого запоминающего устройства, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания, группа входов уменьшаемого которого соединена с группой информационных выходов второго запоминающего устройства, группа информационных входов которого соединена с группой информационных выходов блока формирования эталонных значений ППИП, группа информационных входов которого является первой входной установочной шиной устройства определения координат ИРИ, последовательно соединенные умножитель, сумматор, третье запоминающее устройство, блок определения азимута и угла места, причем первая и вторая группы информационных входов умножителя объединены поразрядно и соединены с группой информационных выходов блока вычитания, генератор синхроимпульсов, выход которого соединен с управляющим входом антенного коммутатора, входами синхронизации аналого-цифрового преобразователя, блока преобразования Фурье, первого, второго и третьего запоминающих устройств, блока вычитания, умножителя, сумматора, блока определения азимута и угла места, блока формирования эталонных значений ППИП и блока вычисления ППИП, первый вычислитель, предназначенный для перевода пространственных параметров летно-подъемного средства (ЛПС)  в геоцентрическую систему координат
в геоцентрическую систему координат  , а вектора направления на s-й ИРИ
, а вектора направления на s-й ИРИ  - в левостороннюю систему декартовых координат
- в левостороннюю систему декартовых координат  второй вычислитель, предназначенный для коррекции вектора направления на s-й ИРИ
второй вычислитель, предназначенный для коррекции вектора направления на s-й ИРИ  с учетом априорно известной ориентации антенной системы бортового пеленгатора
с учетом априорно известной ориентации антенной системы бортового пеленгатора  третий вычислитель, предназначенный для вычисления в нормальной системе координат уточненного вектора направления
третий вычислитель, предназначенный для вычисления в нормальной системе координат уточненного вектора направления  на s-й ИРИ с учетом измеренных в момент времени ti пространственных углов ЛПС, четвертый вычислитель, предназначенный для вычисления значений азимутального угла
на s-й ИРИ с учетом измеренных в момент времени ti пространственных углов ЛПС, четвертый вычислитель, предназначенный для вычисления значений азимутального угла  угла места
угла места  и удаления s-го ИРИ от ЛПС d(H0), пятый вычислитель, предназначенный для определения в геоцентрической системе координат значения истинного вектора направления на s-й ИРИ
и удаления s-го ИРИ от ЛПС d(H0), пятый вычислитель, предназначенный для определения в геоцентрической системе координат значения истинного вектора направления на s-й ИРИ  величина которого зависит от широты и долготы местоположения ЛПС, шестой вычислитель, предназначенный для определения координат точки пересечения вектора
величина которого зависит от широты и долготы местоположения ЛПС, шестой вычислитель, предназначенный для определения координат точки пересечения вектора  с «круглой» Землей
с «круглой» Землей  и преобразования геоцентрических координат s-го ИРИ
и преобразования геоцентрических координат s-го ИРИ  в географические
в географические  седьмой вычислитель, предназначенный для нахождения координат s-го ИРИ с заданной точностью
седьмой вычислитель, предназначенный для нахождения координат s-го ИРИ с заданной точностью  , восьмой вычислитель, предназначенный для преобразования геоцентрических координат s-го ИРИ
, восьмой вычислитель, предназначенный для преобразования геоцентрических координат s-го ИРИ  в географические
в географические  , блок управления, предназначенный для преобразования части вектора
, блок управления, предназначенный для преобразования части вектора  , ограниченного точками (
, ограниченного точками ( ,
,  ) и (
) и ( ,
,  ), в соответствующую линейку адресов {Aijδ}, высот {Hijδ} рельефа местности, блок коммутации, четвертое и пятое запоминающие устройства, радионавигатор, вторая, третья, четвертая, пятая и шестая входные установочные шины устройства определения координат ИРИ, блок сравнения и блок угловой ориентации ЛПС, предназначенный для измерения углов крена
), в соответствующую линейку адресов {Aijδ}, высот {Hijδ} рельефа местности, блок коммутации, четвертое и пятое запоминающие устройства, радионавигатор, вторая, третья, четвертая, пятая и шестая входные установочные шины устройства определения координат ИРИ, блок сравнения и блок угловой ориентации ЛПС, предназначенный для измерения углов крена  , тангажа
, тангажа  и склонения
и склонения  ЛПС, причем первый, второй, третий, четвертый, пятый и шестой вычислители подключены последовательно, первая и вторая группы информационных входов первого вычислителя соединены соответственно с первой и второй группами информационных выходов блока определения азимута и угла места, третья группа информационных входов первого вычислителя объединена со вторыми группами информационных входов четвертого и пятого вычислителей, первыми группами информационных входов блока угловой ориентации ЛПС и блока управления и группой информационных выходов радионавигатора, последовательно соединены седьмой вычислитель, восьмой вычислитель и блок коммутации, группа информационных выходов которого является выходной шиной устройства определения координат ИРИ, а вторая группа информационных входов блока коммутации объединена с группой информационных выходов шестого вычислителя, третьей группой информационных входов блока управления и первой группой информационных входов седьмого вычислителя, вторая группа информационных входов которого соединена с группой информационных выходов пятого вычислителя и второй группой информационных входов блока управления, четвертая группа информационных входов является шестой установочной шиной устройства определения координат ИРИ, пятая группа информационных входов объединена со второй группой информационных входов шестого вычислителя и группой информационных выходов первого вычислителя, а третья группа информационных входов седьмого вычислителя соединена с группой информационных выходов пятого запоминающего устройства, группа адресных входов которого соединена с группой адресных выходов блока управления, а группа информационных входов объединена с четвертой группой информационных входов блока управления и является пятой входной установочной шиной устройства определения координат ИРИ, вторая входная установочная шина которого соединена с группой информационных входов четвертого запоминающего устройства, группа информационных выходов которого соединена с второй группой информационных входов второго вычислителя, вход синхронизации которого объединен с выходом генератора синхроимпульсов и со входами синхронизации первого, третьего, четвертого, пятого, шестого, седьмого и восьмого вычислителей, четвертого и пятого запоминающих устройств, блока управления и блока угловой ориентации ЛПС, первая группа информационных выходов которого соединена со второй группой информационных входов третьего вычислителя, а вторая группа информационных входов является третьей входной установочной шиной устройства определения координат ИРИ, четвертая входная установочная шина которого соединена со второй группой информационных входов блока сравнения, выход которого соединен со входом управления блока коммутации, а первая группа информационных входов соединена с группой информационных выходов четвертого вычислителя, выход обнуления которого соединен со входами обнуления первого, второго и третьего вычислителей.
ЛПС, причем первый, второй, третий, четвертый, пятый и шестой вычислители подключены последовательно, первая и вторая группы информационных входов первого вычислителя соединены соответственно с первой и второй группами информационных выходов блока определения азимута и угла места, третья группа информационных входов первого вычислителя объединена со вторыми группами информационных входов четвертого и пятого вычислителей, первыми группами информационных входов блока угловой ориентации ЛПС и блока управления и группой информационных выходов радионавигатора, последовательно соединены седьмой вычислитель, восьмой вычислитель и блок коммутации, группа информационных выходов которого является выходной шиной устройства определения координат ИРИ, а вторая группа информационных входов блока коммутации объединена с группой информационных выходов шестого вычислителя, третьей группой информационных входов блока управления и первой группой информационных входов седьмого вычислителя, вторая группа информационных входов которого соединена с группой информационных выходов пятого вычислителя и второй группой информационных входов блока управления, четвертая группа информационных входов является шестой установочной шиной устройства определения координат ИРИ, пятая группа информационных входов объединена со второй группой информационных входов шестого вычислителя и группой информационных выходов первого вычислителя, а третья группа информационных входов седьмого вычислителя соединена с группой информационных выходов пятого запоминающего устройства, группа адресных входов которого соединена с группой адресных выходов блока управления, а группа информационных входов объединена с четвертой группой информационных входов блока управления и является пятой входной установочной шиной устройства определения координат ИРИ, вторая входная установочная шина которого соединена с группой информационных входов четвертого запоминающего устройства, группа информационных выходов которого соединена с второй группой информационных входов второго вычислителя, вход синхронизации которого объединен с выходом генератора синхроимпульсов и со входами синхронизации первого, третьего, четвертого, пятого, шестого, седьмого и восьмого вычислителей, четвертого и пятого запоминающих устройств, блока управления и блока угловой ориентации ЛПС, первая группа информационных выходов которого соединена со второй группой информационных входов третьего вычислителя, а вторая группа информационных входов является третьей входной установочной шиной устройства определения координат ИРИ, четвертая входная установочная шина которого соединена со второй группой информационных входов блока сравнения, выход которого соединен со входом управления блока коммутации, а первая группа информационных входов соединена с группой информационных выходов четвертого вычислителя, выход обнуления которого соединен со входами обнуления первого, второго и третьего вычислителей.
Недостатком устройства-прототипа являются большие временные затраты на определение координат ИРИ. Это связано с тем, что для каждого измерения находят первичные (однопозиционные) координаты ИРИ, которые затем усредняют.
Целью заявленных технических решений является разработка способа и устройства определения координат источника радиоизлучения с борта ЛПС, обеспечивающих сокращение временных затрат путем выполнения расчетов координат ИРИ на основе геоцентрической системы координат, что позволяет использовать только азимут и не требуется вычислять угол места. Кроме того, избирательная обработка входного потока данных позволяет дополнительно повысить скорость их анализа при сохранении точностных характеристик.
Поставленная цель достигается тем, что в известном способе определения координат ИРИ, включающем прием сигналов ИРИ в заданной полосе частот ΔF перемещающимся в пространстве бортовым пеленгатором, установленным на летно-подъемном средстве (ЛПС), измерение пространственно-информационных параметров обнаруженных сигналов: азимута  (пеленг) и угла места
(пеленг) и угла места  в системе координат антенной системы с одновременным определением местоположения ЛПС
в системе координат антенной системы с одновременным определением местоположения ЛПС  в момент времени ti, где
в момент времени ti, где  ,
,  , - соответственно широта, долгота и высота ЛПС, преобразование координат ЛПС
, - соответственно широта, долгота и высота ЛПС, преобразование координат ЛПС  в геоцентрическую систему координат
в геоцентрическую систему координат  , а вектор направления на s-й ИРИ
, а вектор направления на s-й ИРИ  в левостороннюю систему декартовых координат
в левостороннюю систему декартовых координат  , коррекцию вектора направления на s-й ИРИ
, коррекцию вектора направления на s-й ИРИ  с учетом априорно известной ориентации антенной системы бортового пеленгатора относительно ЛПС {kant,
с учетом априорно известной ориентации антенной системы бортового пеленгатора относительно ЛПС {kant,  , ζant), где kant, , ζant - соответственно углы крена, тангажа и склонения антенной системы, путем последовательного умножения значений
, ζant), где kant, , ζant - соответственно углы крена, тангажа и склонения антенной системы, путем последовательного умножения значений  на соответствующие углам Эйлера матрицы поворота, после чего в нормальной системе координат вычисление уточненного значения вектора направления
на соответствующие углам Эйлера матрицы поворота, после чего в нормальной системе координат вычисление уточненного значения вектора направления  на s-й ИРИ с учетом измеренных в момент времени ti пространственных углов ЛПС: крена
на s-й ИРИ с учетом измеренных в момент времени ti пространственных углов ЛПС: крена  , тангажа
, тангажа  и склонения
и склонения  определение уточненного значения азимута
определение уточненного значения азимута  в момент времени ti на s-й ИРИ, расположенного на поверхности «круглой Земли», на подготовительном этапе в географических координатах задают границы зоны поиска ИРИ первого уровня (B, L)1, на поверхности которой равномерно распределяют J, J≥10, контрольных точек, для каждой j-й контрольной точки, j=1, 2, …, J, первого уровня, определяют ее географические координаты (В, L)j, а в процессе работы определяют контрольную точку j первого уровня с наибольшим количеством проходящих в пределах локальной зоны с радиусом R пеленгов
в момент времени ti на s-й ИРИ, расположенного на поверхности «круглой Земли», на подготовительном этапе в географических координатах задают границы зоны поиска ИРИ первого уровня (B, L)1, на поверхности которой равномерно распределяют J, J≥10, контрольных точек, для каждой j-й контрольной точки, j=1, 2, …, J, первого уровня, определяют ее географические координаты (В, L)j, а в процессе работы определяют контрольную точку j первого уровня с наибольшим количеством проходящих в пределах локальной зоны с радиусом R пеленгов  , выделяют зону поиска ИРИ второго уровня (В, L)2, центром которой являются координаты
, выделяют зону поиска ИРИ второго уровня (В, L)2, центром которой являются координаты  j-й контрольной точки зоны поиска ИРИ первого уровня, а ее размеры по широте и долготе задаются на подготовительном этапе и соответствуют расстоянию между контрольными точками зоны поиска ИРИ первого уровня, на поверхности зоны поиска ИРИ второго уровня равномерно распределяют М, М≥10, контрольных точек с определенным на подготовительном этапе шагом Δr, значение которого задают с учетом необходимой точности измерения координат ИРИ, определяют их географические координаты (B, L)m, находят контрольную точку m, m∈М, зоны поиска ИРИ второго уровня с наибольшим количеством Ψj проходящих в пределах локальной зоны с радиусом R'≥Δr/2 пеленгов
j-й контрольной точки зоны поиска ИРИ первого уровня, а ее размеры по широте и долготе задаются на подготовительном этапе и соответствуют расстоянию между контрольными точками зоны поиска ИРИ первого уровня, на поверхности зоны поиска ИРИ второго уровня равномерно распределяют М, М≥10, контрольных точек с определенным на подготовительном этапе шагом Δr, значение которого задают с учетом необходимой точности измерения координат ИРИ, определяют их географические координаты (B, L)m, находят контрольную точку m, m∈М, зоны поиска ИРИ второго уровня с наибольшим количеством Ψj проходящих в пределах локальной зоны с радиусом R'≥Δr/2 пеленгов  , сравнивают количество Ψj полученных пеленгов
, сравнивают количество Ψj полученных пеленгов  с заданным на подготовительном этапе порогом η, при выполнении пороговых условий Ψj≥η на основе выделенных Ψj значений пеленгов
с заданным на подготовительном этапе порогом η, при выполнении пороговых условий Ψj≥η на основе выделенных Ψj значений пеленгов  методом наименьших квадратов определяют географические координаты s-го ИРИ (Bs, Ls), выделяют очередную k-ю контрольную точку первого уровня, k∈J, с наибольшим после j-й точки количеством Ψk проходящих в пределах локальной зоны с радиусом R' пеленгов
методом наименьших квадратов определяют географические координаты s-го ИРИ (Bs, Ls), выделяют очередную k-ю контрольную точку первого уровня, k∈J, с наибольшим после j-й точки количеством Ψk проходящих в пределах локальной зоны с радиусом R' пеленгов  и начинают новый цикл анализа по обнаружению s+1-го ИРИ и определению его координат (Bs+1, Ls+1), в противном случае при Ψk<η завершают анализ полученных результатов и приступают к новому циклу приема сигналов в заданных полосе ΔF и зоне поиска ИРИ первого уровня и измерению их пространственно-информационных параметров.
и начинают новый цикл анализа по обнаружению s+1-го ИРИ и определению его координат (Bs+1, Ls+1), в противном случае при Ψk<η завершают анализ полученных результатов и приступают к новому циклу приема сигналов в заданных полосе ΔF и зоне поиска ИРИ первого уровня и измерению их пространственно-информационных параметров.
Определение местоположения ИРИ выполняют в геоцентрической системе координат, сумма квадратов расстояний от которого до всех пеленгов (ортодромов на сфере) минимальна.
Благодаря новой совокупности существенных признаков в заявленном способе за счет использования в расчетах геоцентрической системы координат и аналитических выражений, а также избирательной (двухэтапной) обработки входного потока данных достигается положительный эффект в виде сокращения временных затрат на определение координат ИРИ.
В заявленном устройстве определения координат ИРИ поставленная цель достигается тем, что в известном устройстве, состоящем из антенной решетки, выполненной из N>2 идентичных антенных элементов, расположенных в плоскости пеленгования, антенного коммутатора, N входов которого подключены к соответствующим N выходам антенной решетки, а сигнальный и опорный выходы коммутатора подключены соответственно к сигнальному и опорному входам двухканального приемника, выполненного по схеме с общими гетеродинами, аналого-цифрового преобразователя, выполненного двухканальным соответственно с сигнальным и опорным каналами, причем сигнальный и опорный выходы промежуточной частоты двухканального приемника соединены соответственно с сигнальным и опорным входами аналого-цифрового преобразователя, блока преобразования Фурье, выполненного двухканальным соответственно с сигнальным и опорным каналами, сигнальный и опорный входы которого соединены соответственно с сигнальным и опорным выходами аналого-цифрового преобразователя, первого и второго блока памяти, блока вычитания, блока формирования эталонных значений первичных пространственно-информационных параметров (ППИП), блока вычисления ППИП, первый информационный вход которого соединен с сигнальным выходом блока преобразования Фурье, а второй информационный вход - с опорным выходом блока преобразования Фурье, группа информационных выходов блока вычисления ППИП соединена с группой информационных входов первого блока памяти, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания, группа входов уменьшаемого которого соединена с группой информационных выходов второго блока памяти, группа информационных входов которого соединена с группой информационных выходов блока формирования эталонных значений ППИП, группа информационных входов которого является первой входной установочной шиной устройства определения координат ИРИ, последовательно соединенных умножителя, сумматора, третьего блока памяти, блока определения азимута и угла места, причем первая и вторая группы информационных входов умножителя объединены поразрядно и соединены с группой информационных выходов блока вычитания, первого вычислителя, предназначенного для перевода пространственных параметров летно-подъемного средства (ЛПС)  в геоцентрическую систему координат
в геоцентрическую систему координат  , а вектора направления на s-й ИРИ
, а вектора направления на s-й ИРИ  - в левостороннюю систему декартовых координат
- в левостороннюю систему декартовых координат  , второго вычислителя, предназначенного для коррекции вектора направления на s-й ИРИ
, второго вычислителя, предназначенного для коррекции вектора направления на s-й ИРИ  с учетом априорно известной ориентации антенной системы бортового пеленгатора
с учетом априорно известной ориентации антенной системы бортового пеленгатора  , третьего вычислителя, предназначенного для вычисления в нормальной системе координат уточненного вектора направления
, третьего вычислителя, предназначенного для вычисления в нормальной системе координат уточненного вектора направления  на s-й ИРИ с учетом измеренных в момент времени ti пространственных углов ЛПС, четвертого вычислителя, предназначенного для вычисления значений азимутального угла
на s-й ИРИ с учетом измеренных в момент времени ti пространственных углов ЛПС, четвертого вычислителя, предназначенного для вычисления значений азимутального угла  , пятого, шестого, седьмого и восьмого вычислителей, четвертого и пятого блоков памяти, радионавигатора, второй, третьей, четвертой, пятой и шестой входных установочных шин устройства определения координат ИРИ, блока сравнения и блока угловой ориентации ЛПС, предназначенного для измерения углов крена
, пятого, шестого, седьмого и восьмого вычислителей, четвертого и пятого блоков памяти, радионавигатора, второй, третьей, четвертой, пятой и шестой входных установочных шин устройства определения координат ИРИ, блока сравнения и блока угловой ориентации ЛПС, предназначенного для измерения углов крена  , тангажа
, тангажа  и склонения
и склонения  ЛПС, причем первый, второй, третий и четвертый вычислители подключены последовательно, первая и вторая группы информационных входов первого вычислителя соединены соответственно с первой и второй группами информационных выходов блока определения азимута и угла места, третья группа информационных входов первого вычислителя объединена со второй группой информационных входов четвертого вычислителя, первой группой информационных входов блока угловой ориентации ЛПС и группой информационных выходов радионавигатора, вторая входная установочная шина устройства определения координат ИРИ соединена с группой информационных входов четвертого блока памяти, группа информационных выходов которого соединена с второй группой информационных входов второго вычислителя, вход синхронизации которого объединен с выходом генератора синхроимпульсов и со входами синхронизации первого, третьего, четвертого, пятого, шестого, седьмого и восьмого вычислителей, первого, второго, третьего, четвертого и пятого блоков памяти, с управляющим входом антенного коммутатора, входами синхронизации аналого-цифрового преобразователя, блока преобразования Фурье, блока вычитания, умножителя, сумматора, блока определения азимута и угла места, блока формирования эталонных значений ППИП и блока вычисления ППИП, блока угловой ориентации ЛПС, группа информационных выходов которого соединена со второй группой информационных входов третьего вычислителя, а вторая группа информационных входов является третьей входной установочной шиной устройства определения координат ИРИ, первая группа информационных входов блока сравнения соединена с группой информационных выходов четвертого вычислителя, а входы обнуления первого, второго и третьего вычислителей объединены, пятый вычислитель предназначен для определения контрольной точки j зоны поиска ИРИ первого уровня с наибольшим количеством проходящих в пределах локальной зоны с радиусом R пеленгов
ЛПС, причем первый, второй, третий и четвертый вычислители подключены последовательно, первая и вторая группы информационных входов первого вычислителя соединены соответственно с первой и второй группами информационных выходов блока определения азимута и угла места, третья группа информационных входов первого вычислителя объединена со второй группой информационных входов четвертого вычислителя, первой группой информационных входов блока угловой ориентации ЛПС и группой информационных выходов радионавигатора, вторая входная установочная шина устройства определения координат ИРИ соединена с группой информационных входов четвертого блока памяти, группа информационных выходов которого соединена с второй группой информационных входов второго вычислителя, вход синхронизации которого объединен с выходом генератора синхроимпульсов и со входами синхронизации первого, третьего, четвертого, пятого, шестого, седьмого и восьмого вычислителей, первого, второго, третьего, четвертого и пятого блоков памяти, с управляющим входом антенного коммутатора, входами синхронизации аналого-цифрового преобразователя, блока преобразования Фурье, блока вычитания, умножителя, сумматора, блока определения азимута и угла места, блока формирования эталонных значений ППИП и блока вычисления ППИП, блока угловой ориентации ЛПС, группа информационных выходов которого соединена со второй группой информационных входов третьего вычислителя, а вторая группа информационных входов является третьей входной установочной шиной устройства определения координат ИРИ, первая группа информационных входов блока сравнения соединена с группой информационных выходов четвертого вычислителя, а входы обнуления первого, второго и третьего вычислителей объединены, пятый вычислитель предназначен для определения контрольной точки j зоны поиска ИРИ первого уровня с наибольшим количеством проходящих в пределах локальной зоны с радиусом R пеленгов  , шестой вычислитель предназначен для определения географических координат (В, L)m контрольной точки m, m∈М, зоны поиска ИРИ второго уровня с наибольшим количеством Ψj проходящих в пределах локальной зоны с радиусом R', R'<<R, пеленгов
, шестой вычислитель предназначен для определения географических координат (В, L)m контрольной точки m, m∈М, зоны поиска ИРИ второго уровня с наибольшим количеством Ψj проходящих в пределах локальной зоны с радиусом R', R'<<R, пеленгов  , седьмой вычислитель предназначен для определения границ зоны поиска ИРИ второго уровня (В, L)2 с центром с координатами контрольной точки j зоны поиска ИРИ первого уровня
, седьмой вычислитель предназначен для определения границ зоны поиска ИРИ второго уровня (В, L)2 с центром с координатами контрольной точки j зоны поиска ИРИ первого уровня  , восьмой вычислитель предназначен для равномерного распределения и определения координат (В, L)m контрольных точек m зоны поиска ИРИ второго уровня, m=1, 2, …, М, дополнительно введены девятый вычислитель, предназначенный для равномерного распределения и определения координат (В, L)j контрольных точек j, j=1, 2, …, J, зоны поиска ИРИ первого уровня, шестой, седьмой и восьмой блоки памяти, при этом блок сравнения предназначен для принятия решения о прохождении очередного пеленга
, восьмой вычислитель предназначен для равномерного распределения и определения координат (В, L)m контрольных точек m зоны поиска ИРИ второго уровня, m=1, 2, …, М, дополнительно введены девятый вычислитель, предназначенный для равномерного распределения и определения координат (В, L)j контрольных точек j, j=1, 2, …, J, зоны поиска ИРИ первого уровня, шестой, седьмой и восьмой блоки памяти, при этом блок сравнения предназначен для принятия решения о прохождении очередного пеленга  через зону поиска ИРИ первого уровня {х, у}1, причем группа информационных входов седьмого блока памяти является восьмой входной установочной шиной устройства определения координат ИРИ, предназначенной для задания границ зоны поиска ИРИ первого уровня (B, L)1, а группа информационных выходов соединена с третьей группой информационных входов блока сравнения и с первой группой информационных входов девятого вычислителя, третья группа информационных входов которого является одиннадцатой входной установочной шиной устройства определения координат ИРИ, предназначенной для задания количества контрольных точек J, J≥10, зоны поиска ИРИ первого уровня, а группа информационных выходов девятого вычислителя соединена с третьей группой информационных входов пятого вычислителя, первая группа информационных входов которого является четвертой входной установочной шиной устройства определения координат ИРИ, предназначенной для задания радиуса R локальной зоны поиска ИРИ первого уровня с центрами в контрольных точках j, j=1, 2, …, J, а вторая группа информационных входов соединена с группой информационных выходов шестого блока памяти, первая группа информационных входов которого соединена с группой информационных выходов четвертого вычислителя и первой группой информационных входов блока сравнения, вторая группа информационных входов которого соединена с группой информационных выходов радионавигатора и второй группой информационных входов шестого блока памяти, а выход соединен с входом управления шестого блока памяти, первая группа информационных выходов пятого вычислителя соединена с первой группой информационных входов восьмого блока памяти, вторая группа информационных входов которого является пятой входной установочной шиной устройства определения координат ИРИ и предназначена для задания максимально необходимого количества I используемых в обработке пеленгов
через зону поиска ИРИ первого уровня {х, у}1, причем группа информационных входов седьмого блока памяти является восьмой входной установочной шиной устройства определения координат ИРИ, предназначенной для задания границ зоны поиска ИРИ первого уровня (B, L)1, а группа информационных выходов соединена с третьей группой информационных входов блока сравнения и с первой группой информационных входов девятого вычислителя, третья группа информационных входов которого является одиннадцатой входной установочной шиной устройства определения координат ИРИ, предназначенной для задания количества контрольных точек J, J≥10, зоны поиска ИРИ первого уровня, а группа информационных выходов девятого вычислителя соединена с третьей группой информационных входов пятого вычислителя, первая группа информационных входов которого является четвертой входной установочной шиной устройства определения координат ИРИ, предназначенной для задания радиуса R локальной зоны поиска ИРИ первого уровня с центрами в контрольных точках j, j=1, 2, …, J, а вторая группа информационных входов соединена с группой информационных выходов шестого блока памяти, первая группа информационных входов которого соединена с группой информационных выходов четвертого вычислителя и первой группой информационных входов блока сравнения, вторая группа информационных входов которого соединена с группой информационных выходов радионавигатора и второй группой информационных входов шестого блока памяти, а выход соединен с входом управления шестого блока памяти, первая группа информационных выходов пятого вычислителя соединена с первой группой информационных входов восьмого блока памяти, вторая группа информационных входов которого является пятой входной установочной шиной устройства определения координат ИРИ и предназначена для задания максимально необходимого количества I используемых в обработке пеленгов  , вторая группа информационных выходов пятого вычислителя соединена с первой группой информационных входов седьмого вычислителя, вторая группа информационных входов которого является девятой входной установочной шиной устройства определения координат ИРИ и предназначена для задания размеров зоны поиска ИРИ второго уровня {B2, L2}, а группа информационных выходов соединена с первой группой информационных входов восьмого вычислителя, вторая группа информационных входов которого является десятой входной установочной шиной устройства определения координат ИРИ, предназначенная для задания количества контрольных точек М зоны поиска ИРИ второго уровня, а группа информационных выходов восьмого вычислителя соединена с группой информационных входов пятого блока памяти, группа информационных выходов которого соединена со второй группой информационных входов шестого вычислителя, первая группа информационных входов которого соединена с группой информационных выходов восьмого блока памяти, а третья группа информационных входов является шестой входной установочной шиной устройства определения координат ИРИ и предназначена для задания радиуса R' локальной зон поиска ИРИ второго уровня с центрами в контрольных точках m, m=1, 2, … М, блок расчета координат и блок принятия решения, первая группа информационных входов которого соединена с первой группой информационных выходов шестого вычислителя, вторая группа информационных входов является седьмой входной установочной шиной устройства определения координат ИРИ и предназначена для задания порога в виде количества η пеленгов
, вторая группа информационных выходов пятого вычислителя соединена с первой группой информационных входов седьмого вычислителя, вторая группа информационных входов которого является девятой входной установочной шиной устройства определения координат ИРИ и предназначена для задания размеров зоны поиска ИРИ второго уровня {B2, L2}, а группа информационных выходов соединена с первой группой информационных входов восьмого вычислителя, вторая группа информационных входов которого является десятой входной установочной шиной устройства определения координат ИРИ, предназначенная для задания количества контрольных точек М зоны поиска ИРИ второго уровня, а группа информационных выходов восьмого вычислителя соединена с группой информационных входов пятого блока памяти, группа информационных выходов которого соединена со второй группой информационных входов шестого вычислителя, первая группа информационных входов которого соединена с группой информационных выходов восьмого блока памяти, а третья группа информационных входов является шестой входной установочной шиной устройства определения координат ИРИ и предназначена для задания радиуса R' локальной зон поиска ИРИ второго уровня с центрами в контрольных точках m, m=1, 2, … М, блок расчета координат и блок принятия решения, первая группа информационных входов которого соединена с первой группой информационных выходов шестого вычислителя, вторая группа информационных входов является седьмой входной установочной шиной устройства определения координат ИРИ и предназначена для задания порога в виде количества η пеленгов  , необходимого для принятия решения о расчете координат (Bs, Ls) s-го ИРИ, первый выход блока принятия решения соединен с входами обнуления восьмого блока памяти, пятого, четвертого и третьего вычислителей, а второй выход блока принятия решения соединен со входами управления пятого вычислителя и блока расчета координат, группа информационных входов которого соединена с второй группой информационных выходов шестого вычислителя, а группа информационных выходов является выходной шиной устройства определения координат ИРИ, а входы синхронизации первого и второго блоков сравнения, шестого и седьмого блоков памяти, блока принятия решения объединены и соединены с выходом генератора синхроимпульсов.
, необходимого для принятия решения о расчете координат (Bs, Ls) s-го ИРИ, первый выход блока принятия решения соединен с входами обнуления восьмого блока памяти, пятого, четвертого и третьего вычислителей, а второй выход блока принятия решения соединен со входами управления пятого вычислителя и блока расчета координат, группа информационных входов которого соединена с второй группой информационных выходов шестого вычислителя, а группа информационных выходов является выходной шиной устройства определения координат ИРИ, а входы синхронизации первого и второго блоков сравнения, шестого и седьмого блоков памяти, блока принятия решения объединены и соединены с выходом генератора синхроимпульсов.
Перечисленная совокупность существенных признаков за счет того, что вводятся новые элементы и связи позволяет достичь цели изобретения: сократить временные затраты на определение координат ИРИ.
Заявляемые объекты поясняются чертежами, на которых показаны:
на фиг. 1 - иллюстрируются результаты пеленгования ИРИ с ЛПС в заданном районе;
на фиг. 2 - иллюстрации, поясняющие порядок выполняемых операций:
а) по размещению J контрольных точек зоны поиска ИРИ первого уровня, J≥10, и определению их географических координат (В, L)j;
б) по заданию локальной зоны анализа с радиусом R вокруг J контрольных точек, прокладке пеленгов  с учетом местоположения ЛПС {, }i и определению количества
с учетом местоположения ЛПС {, }i и определению количества  , проходящих рядом с контрольными точками (возле точки j их 5);
, проходящих рядом с контрольными точками (возле точки j их 5);
в) по размещению М контрольных точек зоны поиска ИРИ второго уровня с центром в j-й контрольной точке с координатами (В, L)j и прокладке пеленгов  с учетом местоположения ЛПС {, }i;
с учетом местоположения ЛПС {, }i;
г) по заданию локальной зоны анализа с радиусом R' вокруг М контрольных точек зоны поиска ИРИ второго уровня и определению количества  , проходящих рядом с контрольными точками (возле точки m их 5);
, проходящих рядом с контрольными точками (возле точки m их 5);
на фиг. 3 - обобщенный алгоритм расчета координат ИРИ;
на фиг. 4 - обобщенный алгоритм определения пространственных параметров ИРИ (азимута  );
);
на фиг. 5 - представлены результаты оценки эффективности предлагаемого способа определения координат ИРИ;
на фиг. 6 - обобщенная структурная схема устройства определения координат ИРИ;
на фиг. 7 - алгоритм вычисления эталонных значений первичных пространственно-информационных параметров;
на фиг. 8 - алгоритм работы первого вычислителя;
на фиг. 9 - алгоритм работы второго вычислителя;
на фиг. 10 - алгоритм работы третьего вычислителя;
на фиг. 11 - алгоритм работы четвертого вычислителя;
на фиг. 12 - алгоритм работы пятого вычислителя;
на фиг. 13 - алгоритм работы шестого вычислителя;
на фиг. 14 - алгоритм работы седьмого вычислителя;
на фиг. 15 - алгоритм работы восьмого вычислителя;
на фиг. 16 - алгоритм работы девятого вычислителя;
на фиг. 17 - алгоритм работы блока расчета координат.
Известно, что большинство способов определения координат ИРИ с ЛПС, реализующих угломерный, угло-дальномерный способы местоопределения, базируются на использовании глобальных навигационных спутниковых систем (ГННС) (см. B.C. Шебшаевич, П.П. Дмитриев, Н.В. Иванцевич и др. Спутниковые радионавигационные системы / Под ред. B.C. Шебшаевича. - М.: Радио и связь, 1993 г., стр. 261-275). Кроме информации о собственном местоположении ЛПС и направлении его перемещения при решении задач местоопределения ИРИ в прототипе определяют его пространственную ориентацию: углы крена  , тангажа
, тангажа  и курсового угла
и курсового угла  (угла сноса или склонения
(угла сноса или склонения  ). Информация об этих параметрах может быть получена с помощью известных устройств (см. Пат. РФ №2374659, 2371733, 2553270). Учет названных параметров в совокупности с большим объемом вычислительных процедур прототипа приводит к значительным временным затратам на получение координат ИРИ. На фиг. 1 показаны результаты определения пространственных параметров (пеленгования) с ЛПС в зоне контроля с помощью устройства-прототипа. Сложная сигнально-помеховая обстановка (большое число излучателей в полосе анализа), кратковременность работы ИРИ существенно осложняет определение их координат. Отдельно следует отметить ситуацию, когда на одной частоте одновременно работают несколько пространственно разнесенных ИРИ (базовые станции №1 и №2). Последнее регулярно наблюдается при использовании пеленгатора на борту ЛПС. Поэтому основной акцент в предлагаемых способе и устройстве сделан на сокращение временных затрат на определение координат ИРИ.
). Информация об этих параметрах может быть получена с помощью известных устройств (см. Пат. РФ №2374659, 2371733, 2553270). Учет названных параметров в совокупности с большим объемом вычислительных процедур прототипа приводит к значительным временным затратам на получение координат ИРИ. На фиг. 1 показаны результаты определения пространственных параметров (пеленгования) с ЛПС в зоне контроля с помощью устройства-прототипа. Сложная сигнально-помеховая обстановка (большое число излучателей в полосе анализа), кратковременность работы ИРИ существенно осложняет определение их координат. Отдельно следует отметить ситуацию, когда на одной частоте одновременно работают несколько пространственно разнесенных ИРИ (базовые станции №1 и №2). Последнее регулярно наблюдается при использовании пеленгатора на борту ЛПС. Поэтому основной акцент в предлагаемых способе и устройстве сделан на сокращение временных затрат на определение координат ИРИ.
Основная идея предлагаемых изобретений состоит в определении точки в геоцентрической системе координат, сумма квадратов расстояний от которой до всех пеленгов минимальна. Такое решение оптимально, если ошибки определения азимута на источник являются случайной величиной с нормальным законом распределения. Пеленги в данном случае - это ортодромы на сфере. Поэтому для их задания нужен только азимут и не требуется угол места. Определение этой точки выполняется аналитически, что определяет высокую скорость работы. А использование сферы в качестве поверхности Земли позволяет использовать технические решения для определения местоположения ИРИ, находящихся на значительном расстоянии.
Кроме того, двухэтапная обработка полученных значений  позволяет существенно сократить временные затраты на определение координат.
позволяет существенно сократить временные затраты на определение координат.
Реализация заявляемого способа поясняется следующим образом (см. фиг. 2-5). На подготовительном этапе измеряют ориентацию антенной системы пеленгатора в трех плоскостях принятых в авиации как крена kant, тангажа  и склонения ζant {kant, , ζant} относительно корпуса ЛПС. Значение {kant, , ζant} запоминают и в последующем используют для уточнения результатов θi. Дополнительно в географических координатах задают границы зоны поиска ИРИ первого уровня. С этой целью учитываются координаты крайних точек маршрута полета ЛПС. В результате получают прямоугольник со сторонами, параллельными меридианам и параллелям. Полученную зону обычно расширяют во все стороны на заданное значение, зависящее от потенциальной дальности работы пеленгатора. На полученную зону поиска ИРИ первого уровня (B, L)1 накладывают равномерно распределенное количество J контрольных точек (см. фиг. 2). Выбор в пользу количества контрольных точек J, а не в пользу размера шага между ними (в отличии от второго уровня) сделан с целью получения гарантированного времени измерения координат ИРИ.
и склонения ζant {kant, , ζant} относительно корпуса ЛПС. Значение {kant, , ζant} запоминают и в последующем используют для уточнения результатов θi. Дополнительно в географических координатах задают границы зоны поиска ИРИ первого уровня. С этой целью учитываются координаты крайних точек маршрута полета ЛПС. В результате получают прямоугольник со сторонами, параллельными меридианам и параллелям. Полученную зону обычно расширяют во все стороны на заданное значение, зависящее от потенциальной дальности работы пеленгатора. На полученную зону поиска ИРИ первого уровня (B, L)1 накладывают равномерно распределенное количество J контрольных точек (см. фиг. 2). Выбор в пользу количества контрольных точек J, а не в пользу размера шага между ними (в отличии от второго уровня) сделан с целью получения гарантированного времени измерения координат ИРИ.
На подготовительном этапе также задают размеры {B2, L2} по широте и долготе зоны поиска ИРИ второго уровня (в метрах). Целесообразно, чтобы размеры ее сторон были не меньше расстояния d между контрольными точками j зоны контроля ИРИ первого уровня. Кроме того, для этой зоны задается М контрольных точек второго уровня. В связи с тем, что размеры зоны поиска ИРИ второго уровня определены совместно с М контрольными точками, это эквивалентно формированию шага Δr сетки контрольных точек m, m∈М. Дополнительно задают минимально необходимое количество η пеленгов  для принятия решения о начале расчета координат (Bs, Ls) s-го источника радиоизлучения.
для принятия решения о начале расчета координат (Bs, Ls) s-го источника радиоизлучения.
В процессе полета ЛПС по аналогии со способом-прототипом (см. фиг. 3) в заданной полосе частот ΔF осуществляют поиск и прием сигналов ИРИ, измерение их пространственных параметров: азимута θi и угла места βi в системе координат антенной системы. Одновременно в момент времени ti с помощью ГНСС определяют местоположение собственно ЛПС { ,
, ,
, },
},  ,
,  ,
,  - соответственно широта, долгота и высота ЛПС.
- соответственно широта, долгота и высота ЛПС.
Данные результаты получены без учета ориентации антенной системы (АС) пеленгатора относительно корпуса ЛПС и собственно ориентации ЛПС в пространстве, а выполненную операцию можно интерпретировать следующим образом. По измеренному направлению (θi,βi,) получают вектор - направление на источник в системе координат АС.
Далее в способе-прототипе определяют координаты ИРИ в соответствии с выражениями

Для удобства работы (см. фиг. 4) последние переводят в географические координаты  .
.
Изначально учитывают ориентацию АС пеленгатора относительно ЛПС и положение ЛПС в пространстве. Это достигается путем последовательного перехода из одной системы координат в другую, что удобнее и быстрее выполнять в декартовой системе координат. Координаты ЛПС  , измеренные в момент времени ti, преобразуют в геоцентрическую систему координат:
, измеренные в момент времени ti, преобразуют в геоцентрическую систему координат:

где R* - радиус Земли, R* = 6370000 м.
Далее осуществляют перевод вектора направления на источник  в левостороннюю систему декартовых координат
в левостороннюю систему декартовых координат  следующим образом
следующим образом
В первом преобразовании вектора направления на s-й ИРИ  учитывают априорно известную ориентацию АС относительно ЛПС на основе данных, полученных на подготовительном этапе. Коррекцию
учитывают априорно известную ориентацию АС относительно ЛПС на основе данных, полученных на подготовительном этапе. Коррекцию  осуществляют в плоскости трех углов Эйлера: крена kant, тангажа и склонения ζant. Исходный вектор
осуществляют в плоскости трех углов Эйлера: крена kant, тангажа и склонения ζant. Исходный вектор  последовательно перемножают на три соответствующие углам Эйлера матрицы поворота
последовательно перемножают на три соответствующие углам Эйлера матрицы поворота

где  ,
,
 ,
,
 .
.
На следующем этапе в нормальной системе координат осуществляют преобразование скорректированного вектора направления на s-й ИРИ  с целью учета ориентации ЛПС относительно земной поверхности и положения ЛПС в пространстве, что позволяет получить уточненное значение вектора направления на ИРИ
с целью учета ориентации ЛПС относительно земной поверхности и положения ЛПС в пространстве, что позволяет получить уточненное значение вектора направления на ИРИ  . Переход через эту систему координат продиктован тем, что в ней измеряются углы ориентации ЛПС. Получение вектора направления на источник
. Переход через эту систему координат продиктован тем, что в ней измеряются углы ориентации ЛПС. Получение вектора направления на источник  в нормальной системе координат также предпочтительно. Ориентация ЛПС обычно задается углами
в нормальной системе координат также предпочтительно. Ориентация ЛПС обычно задается углами  ,
,  и
и  , которые определяют в каждой точке относительно плоскости, касательной к сферической модели земной поверхности. Ось крена
, которые определяют в каждой точке относительно плоскости, касательной к сферической модели земной поверхности. Ось крена  лежит в этой плоскости и направлена на географический север, ось склонения
лежит в этой плоскости и направлена на географический север, ось склонения  перпендикулярна указанной плоскости и направлена к центру земли, ось тангажа
перпендикулярна указанной плоскости и направлена к центру земли, ось тангажа  лежит в указанной плоскости таким образом, что осей представляет правую декартову систему координат (см. Авиация: Энциклопедия. - М.: Большая Российская энциклопедия, 1994 г.). Полученный на предыдущем этапе вектор
лежит в указанной плоскости таким образом, что осей представляет правую декартову систему координат (см. Авиация: Энциклопедия. - М.: Большая Российская энциклопедия, 1994 г.). Полученный на предыдущем этапе вектор  последовательно перемножают на три соответствующие матрицы поворота (относительно каждой из названных осей)
последовательно перемножают на три соответствующие матрицы поворота (относительно каждой из названных осей)

где,  ,
,
 ,
,
 .
.
Уточненное значение азимута  определяют из выражения (5) следующим образом:
определяют из выражения (5) следующим образом:

Здесь вектор  находится в нормальной системе координат:
находится в нормальной системе координат:  - направление на север,
- направление на север,  - на восток,
- на восток,  - к центру Земли.
- к центру Земли.
На первом этапе анализа полученные значения пеленгов  с учетом местоположения ЛПС (пеленгатора) накладывают на зону поиска ИРИ первого уровня. Необходимая скважность измерения
с учетом местоположения ЛПС (пеленгатора) накладывают на зону поиска ИРИ первого уровня. Необходимая скважность измерения  зависит от скорости и маршрута полета ЛПС (взаимного расположения j-х контрольных точек, j = 1, 2, …, J, и расположения ЛПС). Последняя определяет необходимое количество измерений
зависит от скорости и маршрута полета ЛПС (взаимного расположения j-х контрольных точек, j = 1, 2, …, J, и расположения ЛПС). Последняя определяет необходимое количество измерений  , полученных для каждой j-й контрольной точки.
, полученных для каждой j-й контрольной точки.
Определяют контрольную точку j первого уровня (см. фиг. 2) с наибольшим количеством проходящих в пределах зоны с радиусом R пеленгов (см. Приложение 1). Значение R выбирают из условия R≥d/2, где d - расстояние между контрольными точками первого уровня. Следует отметить, что выбор в пользу количества J контрольных точек зоны поиска ИРИ первого уровня, а не в пользу размера d сделан с целью получения гарантированного (минимизированного) по времени определения координат ИРИ.
В результате выполненного анализа выбирают контрольную точку j с координатами с наибольшим количеством рядом с ней проходящих пеленгов  .
.
Отталкиваясь от координат контрольной точки j, выбранной в качестве приближения первого уровня, строят зону поиска ИРИ второго уровня. Центром зоны назначают координаты j-й контрольной точки . Размеры зоны поиска ИРИ второго уровня {B2, L2} задают в метрах. Целесообразно, чтобы последние были не менее d х d.
На сформированной на втором этапе зоне поиска ИРИ второго уровня равномерно распределяют М контрольных точек. Последнее эквивалентно заданию шага сетки контрольных точек m с шагом Δr второго уровня, m∈М. В свою очередь Δr определяется заданной точностью определения координат ИРИ. В результате в предлагаемом способе достигают оптимум между быстродействием и точностью поиска.
Определяют координаты (B, L)m, m=1, 2, …, М, всех М контрольных точек зоны поиска ИРИ второго уровня. Находят контрольную точку m∈М зоны поиска ИРИ второго уровня (B, L)2 с наибольшим количеством Ψj проходящих в пределах зоны с радиусом R'≥Δr/2 пеленгов  (см. Приложение 1). Сравнивают количество Ψj полученных пеленгов
(см. Приложение 1). Сравнивают количество Ψj полученных пеленгов  с заданным на подготовительном этапе порогом η. При выполнении пороговых условий Ψj≥η принимают решение об обнаружении s-го ИРИ и приступают к расчету его координат:
с заданным на подготовительном этапе порогом η. При выполнении пороговых условий Ψj≥η принимают решение об обнаружении s-го ИРИ и приступают к расчету его координат:
где Bs и Ls - соответственно широта и долгота местоположения s-го ИРИ,
 ;
;
 ;
;
 ;
;
 ,
,  - соответственно широта и долгота начала пеленга
- соответственно широта и долгота начала пеленга  i-го измерения (координаты ЛПС в ti момент времени);
i-го измерения (координаты ЛПС в ti момент времени);
Ψj - количество измерений.
В Приложении 2 приведено предложение по минимизации временных затрат на расчет (7) и (8).
Далее выделяют очередную k-тую контрольную точку зоны поиска ИРИ первого уровня, k∈J, с наибольшим после j-й точки количеством проходящих рядом пеленгов  и начинают новый цикл анализа по обнаружению очередного s+1-го ИРИ и определению его координат (см. фиг. 3). В противном случае, когда Ψk<η, завершают анализ полученных результатов и приступают к новому циклу приема сигналов в заданных полосе частот ΔF и зоне поиска ИРИ первого уровня и измерению их пространственно-информационных параметров.
и начинают новый цикл анализа по обнаружению очередного s+1-го ИРИ и определению его координат (см. фиг. 3). В противном случае, когда Ψk<η, завершают анализ полученных результатов и приступают к новому циклу приема сигналов в заданных полосе частот ΔF и зоне поиска ИРИ первого уровня и измерению их пространственно-информационных параметров.
На фиг. 5 изображены результаты моделирования сравнительной скорости работы алгоритмов расчета координат ИРИ в прототипе (пунктирная линия) и предлагаемом способе (сплошная линия). По оси абсцисс отложено количество измерений, участвующих в расчете. По основной оси ординат (слева) отложено время работы алгоритма прототипа в миллисекундах. По вспомогательной оси ординат (справа) отложено время работы предлагаемого алгоритма в миллисекундах. Из моделирования видно, что оба алгоритма имеют близкую к линейной зависимость временных затрат от количества измерений. Время на определение координат растет пропорционально увеличению количества измерений. Но алгоритм прототипа имеет в десятки раз большие временные затраты. Это связано с тем, что для каждого измерения находятся первичные (однопозиционные) координаты ИРИ, которые затем усредняются. В предлагаемом способе не учитывается угол места пеленга и не определяются первичные (однопозиционные) координаты, что значительно ускоряет время расчета. Однако стоит отметить, что алгоритм прототипа позволяет получить предварительные координаты ИРИ при малом количестве измерений (вплоть до одного измерения), в то время как предлагаемому алгоритму потребуется несколько измерений.
Устройство определения координат источников радиоизлучения (см. фиг. 6), содержит антенную решетку 5, выполненную из N>2 идентичных антенных элементов, расположенных в плоскости пеленгования, антенный коммутатор 6, N входов которого подключены к соответствующим N выходам антенной решетки 5, а сигнальный и опорный выходы коммутатора 6 подключены соответственно к сигнальному и опорному входам двухканального приемника 7, выполненного по схеме с общими гетеродинами, аналого-цифровой преобразователь 8, выполненный двухканальным соответственно с сигнальным и опорным каналами, причем сигнальный и опорный выходы промежуточной частоты двухканального приемника 7 соединены соответственно с сигнальным и опорным входами аналого-цифрового преобразователя 8, блок преобразования Фурье 9, выполненный двухканальным соответственно с сигнальным и опорным каналами, сигнальный и опорный входы которого соединены соответственно с сигнальным и опорным выходами аналого-цифрового преобразователя 8, первый 11 и второй 2 блоки памяти, блок вычитания 12, блок формирования эталонных значений первичных пространственно-информационных параметров (ППИП) 3, блок вычисления ППИП 10, первый информационный вход которого соединен с сигнальным выходом блока преобразования Фурье 9, а второй информационный вход - с опорным выходом блока преобразования Фурье 9, группа информационных выходов блока вычисления ППИП 10 соединена с группой информационных входов первого блока памяти 11, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания 12, группа входов уменьшаемого которого соединена с группой информационных выходов второго блока памяти 2, группа информационных входов которого соединена с группой информационных выходов блока формирования эталонных значений ППИП 3, группа информационных входов которого является первой входной установочной шиной 4 устройства определения координат ИРИ, последовательно соединенные умножитель 13, сумматор 14, третий блок памяти 15, блок определения азимута и угла места 16, причем первая и вторая группы информационных входов умножителя 13 объединены поразрядно и соединены с группой информационных выходов блока вычитания 12, первый вычислитель 17, предназначенный для перевода пространственных параметров летно-подъемного средства  в геоцентрическую систему координат
в геоцентрическую систему координат  , а вектора направления на s-й ИРИ
, а вектора направления на s-й ИРИ  - в левостороннюю систему декартовых координат
- в левостороннюю систему декартовых координат  , второй вычислитель 18, предназначенный для коррекции вектора направления на s-й ИРИ
, второй вычислитель 18, предназначенный для коррекции вектора направления на s-й ИРИ  с учетом априорно известной ориентации антенной системы бортового пеленгатора
с учетом априорно известной ориентации антенной системы бортового пеленгатора  , третий вычислитель 19, предназначенный для вычисления в нормальной системе координат уточненного вектора направления
, третий вычислитель 19, предназначенный для вычисления в нормальной системе координат уточненного вектора направления  на s-й ИРИ с учетом измеренных в момент времени ti пространственных углов ЛПС, четвертый вычислитель 20, предназначенный для вычисления значений азимутального угла
на s-й ИРИ с учетом измеренных в момент времени ti пространственных углов ЛПС, четвертый вычислитель 20, предназначенный для вычисления значений азимутального угла  , пятый 22, шестой 27, седьмой 40 и восьмой 41 вычислители, четвертый 33 и пятый блоки памяти 26, радионавигатор 34, вторая 32, третья 36, четвертая 23, пятая 25 и шестая 30 входные установочные шины устройства определения координат ИРИ, блок сравнения 39 и блок угловой ориентации ЛПС 35, предназначенный для измерения углов крена
, пятый 22, шестой 27, седьмой 40 и восьмой 41 вычислители, четвертый 33 и пятый блоки памяти 26, радионавигатор 34, вторая 32, третья 36, четвертая 23, пятая 25 и шестая 30 входные установочные шины устройства определения координат ИРИ, блок сравнения 39 и блок угловой ориентации ЛПС 35, предназначенный для измерения углов крена  , тангажа
, тангажа  и склонения
и склонения  ЛПС, причем первый 17, второй 18, третий 19 и четвертый 20 вычислители подключены последовательно, первая и вторая группы информационных входов первого вычислителя 17 соединены соответственно с первой и второй группами информационных выходов блока определения азимута и угла места 16, третья группа информационных входов первого вычислителя 17 объединена со второй группой информационных входов четвертого вычислителя 20, первой группой информационных входов блока угловой ориентации ЛПС 35 и группой информационных выходов радионавигатора 34, вторая входная установочная шина устройства определения координат ИРИ 32 соединена с группой информационных входов четвертого блока памяти 33, группа информационных выходов которого соединена с второй группой информационных входов второго вычислителя 18, вход синхронизации которого объединен с выходом генератора синхроимпульсов 1 и со входами синхронизации первого 17, третьего 19, четвертого 20, пятого 22, шестого 27, седьмого 40 и восьмого 41 вычислителей, первого 11, второго 2, третьего 15, четвертого 33 и пятого 26 блоков памяти, с управляющим входом антенного коммутатора 6, входами синхронизации аналого-цифрового преобразователя 8, блока преобразования Фурье 9, блока вычитания 12, умножителя 13, сумматора 14, блока определения азимута и угла места 16, блока формирования эталонных значений ППИП 3 и блока вычисления ППИП 10, блока угловой ориентации ЛПС 35, группа информационных выходов которого соединена со второй группой информационных входов третьего вычислителя 19, а вторая группа информационных входов является третьей входной установочной шиной устройства определения координат ИРИ 36, первая группа информационных входов блока сравнения 39 соединена с группой информационных выходов четвертого вычислителя 20, а входы обнуления первого 17, второго 18 и третьего 19 вычислителей объединены, при этом пятый вычислитель 22 предназначен для определения контрольной точки j поиска ИРИ первого уровня с наибольшим количеством проходящих в пределах локальной зоны с радиусом R пеленгов
ЛПС, причем первый 17, второй 18, третий 19 и четвертый 20 вычислители подключены последовательно, первая и вторая группы информационных входов первого вычислителя 17 соединены соответственно с первой и второй группами информационных выходов блока определения азимута и угла места 16, третья группа информационных входов первого вычислителя 17 объединена со второй группой информационных входов четвертого вычислителя 20, первой группой информационных входов блока угловой ориентации ЛПС 35 и группой информационных выходов радионавигатора 34, вторая входная установочная шина устройства определения координат ИРИ 32 соединена с группой информационных входов четвертого блока памяти 33, группа информационных выходов которого соединена с второй группой информационных входов второго вычислителя 18, вход синхронизации которого объединен с выходом генератора синхроимпульсов 1 и со входами синхронизации первого 17, третьего 19, четвертого 20, пятого 22, шестого 27, седьмого 40 и восьмого 41 вычислителей, первого 11, второго 2, третьего 15, четвертого 33 и пятого 26 блоков памяти, с управляющим входом антенного коммутатора 6, входами синхронизации аналого-цифрового преобразователя 8, блока преобразования Фурье 9, блока вычитания 12, умножителя 13, сумматора 14, блока определения азимута и угла места 16, блока формирования эталонных значений ППИП 3 и блока вычисления ППИП 10, блока угловой ориентации ЛПС 35, группа информационных выходов которого соединена со второй группой информационных входов третьего вычислителя 19, а вторая группа информационных входов является третьей входной установочной шиной устройства определения координат ИРИ 36, первая группа информационных входов блока сравнения 39 соединена с группой информационных выходов четвертого вычислителя 20, а входы обнуления первого 17, второго 18 и третьего 19 вычислителей объединены, при этом пятый вычислитель 22 предназначен для определения контрольной точки j поиска ИРИ первого уровня с наибольшим количеством проходящих в пределах локальной зоны с радиусом R пеленгов  . Шестой вычислитель 27 предназначен для определения контрольной точки m, m∈М, зоны поиска ИРИ второго уровня с наибольшим количеством Ψj проходящих в пределах локальной зоны с радиусом R', R'<<R, пеленгов
. Шестой вычислитель 27 предназначен для определения контрольной точки m, m∈М, зоны поиска ИРИ второго уровня с наибольшим количеством Ψj проходящих в пределах локальной зоны с радиусом R', R'<<R, пеленгов  . Седьмой вычислитель 40 предназначен для определения границ зоны поиска ИРИ второго уровня (B, L)2 с центром с координатами контрольной точки j поиска ИРИ первого уровня (B, L)j. Восьмой вычислитель 41 предназначен для равномерного распределения и определения координат (B, L)m контрольных точек m зоны поиска ИРИ второго уровня, m=1, 2, …, М. Девятый вычислитель 44, предназначен для равномерного распределения и определения координат (B, L)j контрольных точек j, j=1, 2, …, J, зоны поиска ИРИ первого уровня. Шестой 21, седьмой 38 и восьмой 24 блоки памяти. Блок сравнения 39 предназначен для принятия решения о прохождении очередного пеленга
. Седьмой вычислитель 40 предназначен для определения границ зоны поиска ИРИ второго уровня (B, L)2 с центром с координатами контрольной точки j поиска ИРИ первого уровня (B, L)j. Восьмой вычислитель 41 предназначен для равномерного распределения и определения координат (B, L)m контрольных точек m зоны поиска ИРИ второго уровня, m=1, 2, …, М. Девятый вычислитель 44, предназначен для равномерного распределения и определения координат (B, L)j контрольных точек j, j=1, 2, …, J, зоны поиска ИРИ первого уровня. Шестой 21, седьмой 38 и восьмой 24 блоки памяти. Блок сравнения 39 предназначен для принятия решения о прохождении очередного пеленга  через зону поиска ИРИ первого уровня (В, L)1, причем группа информационных входов седьмого блока памяти 38 является восьмой входной установочной шиной 37 устройства определения координат ИРИ, предназначенной для задания границ зоны поиска ИРИ первого уровня (B, L)1, а группа информационных выходов соединена с третьей группой информационных входов блока сравнения 39 и с первой группой информационных входов девятого вычислителя 44, вторая группа информационных входов которого является одиннадцатой входной установочной шиной 45 устройства определения координат ИРИ, предназначенной для задания количества контрольных точек J, J≥10, зоны поиска ИРИ первого уровня. Группа информационных выходов девятого вычислителя 44 соединена с третьей группой информационных входов пятого вычислителя 22, первая группа информационных входов которого является четвертой входной установочной шиной 23 устройства определения координат ИРИ, предназначенной для задания радиуса R локальных зон поиска ИРИ первого уровня с центрами в контрольных точках j, j=1 ,2, …, J, a вторая группа информационных входов соединена с группой информационных выходов шестого блока памяти 21, первая группа информационных входов которого соединена с группой информационных выходов четвертого вычислителя 20 и первой группой информационных входов блока сравнения 39, вторая группа информационных входов которого соединена с группой информационных выходов радионавигатора 34 и второй группой информационных входов шестого блока памяти 21, а выход блока сравнения 39 соединен с входом управления шестого блока памяти 21. Первая группа информационных выходов пятого вычислителя 22 соединена с первой группой информационных входов восьмого блока памяти 24, вторая группа информационных входов которого является пятой входной установочной шиной 25 устройства определения координат ИРИ и предназначена для задания максимально необходимого количества I используемых в обработке пеленгов
через зону поиска ИРИ первого уровня (В, L)1, причем группа информационных входов седьмого блока памяти 38 является восьмой входной установочной шиной 37 устройства определения координат ИРИ, предназначенной для задания границ зоны поиска ИРИ первого уровня (B, L)1, а группа информационных выходов соединена с третьей группой информационных входов блока сравнения 39 и с первой группой информационных входов девятого вычислителя 44, вторая группа информационных входов которого является одиннадцатой входной установочной шиной 45 устройства определения координат ИРИ, предназначенной для задания количества контрольных точек J, J≥10, зоны поиска ИРИ первого уровня. Группа информационных выходов девятого вычислителя 44 соединена с третьей группой информационных входов пятого вычислителя 22, первая группа информационных входов которого является четвертой входной установочной шиной 23 устройства определения координат ИРИ, предназначенной для задания радиуса R локальных зон поиска ИРИ первого уровня с центрами в контрольных точках j, j=1 ,2, …, J, a вторая группа информационных входов соединена с группой информационных выходов шестого блока памяти 21, первая группа информационных входов которого соединена с группой информационных выходов четвертого вычислителя 20 и первой группой информационных входов блока сравнения 39, вторая группа информационных входов которого соединена с группой информационных выходов радионавигатора 34 и второй группой информационных входов шестого блока памяти 21, а выход блока сравнения 39 соединен с входом управления шестого блока памяти 21. Первая группа информационных выходов пятого вычислителя 22 соединена с первой группой информационных входов восьмого блока памяти 24, вторая группа информационных входов которого является пятой входной установочной шиной 25 устройства определения координат ИРИ и предназначена для задания максимально необходимого количества I используемых в обработке пеленгов  . Вторая группа информационных выходов пятого вычислителя 22 соединена с первой группой информационных входов седьмого вычислителя 40, вторая группа информационных входов которого является девятой входной установочной шиной 42 устройства определения координат ИРИ и предназначена для задания размеров зоны поиска ИРИ второго уровня {B2, L2}, а группа информационных выходов соединена с первой группой информационных входов восьмого вычислителя 41, вторая группа информационных входов которого является десятой входной установочной шиной 43 устройства определения координат ИРИ, предназначенная для задания количества контрольных точек М зоны поиска ИРИ второго уровня. Группа информационных выходов восьмого вычислителя 41 соединена с группой информационных входов пятого блока памяти 26, группа информационных выходов которого соединена со второй группой информационных входов шестого вычислителя 27, первая группа информационных входов которого соединена с группой информационных выходов восьмого блока памяти 24, а третья группа информационных входов является шестой входной установочной шиной 30 устройства определения координат ИРИ и предназначена для задания радиуса R' локальных зон поиска ИРИ второго уровня с центрами в контрольных точках m, m=1, 2, … М. Блок расчета координат и блок принятия решения 28, первая группа информационных входов которого соединена с первой группой информационных выходов шестого вычислителя 27, вторая группа информационных входов является седьмой входной установочной шиной 31 устройства определения координат ИРИ и предназначена для задания порога в виде количества η пеленгов
. Вторая группа информационных выходов пятого вычислителя 22 соединена с первой группой информационных входов седьмого вычислителя 40, вторая группа информационных входов которого является девятой входной установочной шиной 42 устройства определения координат ИРИ и предназначена для задания размеров зоны поиска ИРИ второго уровня {B2, L2}, а группа информационных выходов соединена с первой группой информационных входов восьмого вычислителя 41, вторая группа информационных входов которого является десятой входной установочной шиной 43 устройства определения координат ИРИ, предназначенная для задания количества контрольных точек М зоны поиска ИРИ второго уровня. Группа информационных выходов восьмого вычислителя 41 соединена с группой информационных входов пятого блока памяти 26, группа информационных выходов которого соединена со второй группой информационных входов шестого вычислителя 27, первая группа информационных входов которого соединена с группой информационных выходов восьмого блока памяти 24, а третья группа информационных входов является шестой входной установочной шиной 30 устройства определения координат ИРИ и предназначена для задания радиуса R' локальных зон поиска ИРИ второго уровня с центрами в контрольных точках m, m=1, 2, … М. Блок расчета координат и блок принятия решения 28, первая группа информационных входов которого соединена с первой группой информационных выходов шестого вычислителя 27, вторая группа информационных входов является седьмой входной установочной шиной 31 устройства определения координат ИРИ и предназначена для задания порога в виде количества η пеленгов  , необходимого для принятия решения о расчете координат (Bs, Ls) s-го ИРИ. Первый выход блока принятия решения 28 соединен с выходами обнуления восьмого блока памяти 24, пятого 22, четвертого 20 и третьего 19 вычислителей, а второй выход блока принятия решения 28 соединен со входами управления пятого вычислителя и блока расчета координат 29, группа информационных входов которого соединена с второй группой информационных выходов шестого вычислителя 27, а группа информационных выходов является выходной шиной 46 устройства определения координат ИРИ. Входы синхронизации первого 24 и второго 39 блоков сравнения, шестого 21 и седьмого 38 блоков памяти, блока принятия решения 28 объединены и соединены с выходом генератора синхроимпульсов 1.
, необходимого для принятия решения о расчете координат (Bs, Ls) s-го ИРИ. Первый выход блока принятия решения 28 соединен с выходами обнуления восьмого блока памяти 24, пятого 22, четвертого 20 и третьего 19 вычислителей, а второй выход блока принятия решения 28 соединен со входами управления пятого вычислителя и блока расчета координат 29, группа информационных входов которого соединена с второй группой информационных выходов шестого вычислителя 27, а группа информационных выходов является выходной шиной 46 устройства определения координат ИРИ. Входы синхронизации первого 24 и второго 39 блоков сравнения, шестого 21 и седьмого 38 блоков памяти, блока принятия решения 28 объединены и соединены с выходом генератора синхроимпульсов 1.
Работа устройства осуществляется следующим образом.
На подготовительном этапе в географических координатах задают границы зоны поиска ИРИ первого уровня (рабочей зоны). С этой целью учитывают координаты крайних точек маршрута полета ЛПС. В результате получают прямоугольник со сторонами, параллельными меридианам и параллелям. Полученную зону обычно расширяют во все стороны на заданное значение, зависящее от потенциальной дальности работы пеленгатора. Значение полученной зоны поиска ИРИ первого уровня (В, L)1 по восьмой входной установочной шине 31 записывают в седьмой блок памяти 38. На полученную зону поиска ИРИ первого уровня в блоке 44 накладывают равномерно распределенные J контрольных точек. От выбора значения J зависит гарантированное время измерения координат ИРИ. Так, необоснованное увеличение на первом этапе количества контрольных точек J влечет за собой увеличение суммарных временных затрат на нахождение местоположения ИРИ.
Далее для каждой контрольной точки j зоны поиска ИРИ первого уровня, j=1, 2, …, J, определяют ее географические координаты (В, L)j. С этой целью значение J по одиннадцатой входной шине 45 подают на вторую группу информационных входов девятого вычислителя 44, на первую группу информационных входов с группы информационных выходов седьмого блока памяти поступают данные о границах зоны поиска ИРИ первого уровня (В, L)1. В задачу вычислителя 44 входит равномерно распределить по данной площади J контрольных точек и определить их географические координаты (В, L)j. Полученные в блоке 44 значения координат поступают на третью группу информационных входов пятого вычислителя 22. Значение I подается по пятой входной установочной шине 25 на вторую группу информационных входов первого блока сравнения 24 и определяет максимально необходимое количество пеленгов в* для определения координат ИРИ. Необоснованное завышение I приведет к увеличению временных затрат на обнаружение s-го ИРИ и определение его координат.
На подготовительном этапе также задают размеры зоны поиска ИРИ второго уровня {В2.L2} по девятой входной установочной шине 42. Ее размеры поступают на вторую группу информационных входов седьмого вычислителя 40. По десятой входной установочной шине 43 задают значение М контрольных точек для зоны поиска ИРИ второго уровня. В связи с тем, что размеры зоны поиска ИРИ второго уровня постоянны для всех возможных ситуаций в зоне поиска ИРИ первого уровня, то задание равномерной сетки из М контрольных точек второго уровня эквивалентно формированию необходимого шага Δr (Δr=const), между ними. Последний определяет необходимую (заданную) точность определения координат ИРИ. В результате заданием количества контрольных точек J, М и площадью (В, L)2 в заявленном устройстве достигается необходимое гарантированное сокращение временных затрат на определение координат ИРИ при сохранении точностных характеристик измерителя.
По четвертой входной установочной шине 23 задают радиус R локальной зоны анализа вокруг контрольных точек j первого уровня, R≥d/2. Значение R поступает на первую группу информационных входов пятого вычислителя 22.
По шестой входной установочной шине задают радиус локальной зоны анализа R' вокруг М контрольных точек зоны поиска ИРИ второго уровня, R'≥Δr/2.
По седьмой входной установочной шине задают необходимое количество η пеленгов  , проходящих через локальную зону с радиусом R' с центром в m-й контрольной точке для принятия решения об обнаружении s-го ИРИ и начале расчета его координат.
, проходящих через локальную зону с радиусом R' с центром в m-й контрольной точке для принятия решения об обнаружении s-го ИРИ и начале расчета его координат.
Заявляемое устройство (см. фиг. 6) представляет из себя фазовый интерферометр (блоки 1-16), дополненный элементами навигации (блоки 34, 35) в совокупности с вычислительными модулями (блоки 17-20, 22, 40, 44) и элементами 26-29, обеспечивающими принятие решения и расчет координат ИРИ.
Работа фазового интерферометра аналогична устройству-прототипу (см. Пат. РФ №2458360, G01S 3/14, опубл. 10.08.2012 г., бюл. №22). На подготовительном этапе выполняют следующие операции. Измеряют взаимные расстояния между антенными элементами  решетки 5 при их размещении на плоскости. Результаты измерений по первой входной установочной шине 4 (см. фиг. 6) поступают на вход блока формирования эталонных значений ППИП 3. Весь заданный диапазон частот ΔF делят на поддиапазоны, размеры которых Δƒ определяются минимальной шириной пропускания приемных трактов 7. Поддиапазоны, количество которых V=ΔF/Δƒ, нумеруют ν=1, 2, …, V. Рассчитывают средние частоты всех поддиапазонов по формуле ƒν = Δƒ(2ν - 1)/2. Определяют эталонные значения ППИП (блок 3) для средних частот всех поддиапазонов ƒν. В качестве ППИП используют значения разностей фаз сигналов
решетки 5 при их размещении на плоскости. Результаты измерений по первой входной установочной шине 4 (см. фиг. 6) поступают на вход блока формирования эталонных значений ППИП 3. Весь заданный диапазон частот ΔF делят на поддиапазоны, размеры которых Δƒ определяются минимальной шириной пропускания приемных трактов 7. Поддиапазоны, количество которых V=ΔF/Δƒ, нумеруют ν=1, 2, …, V. Рассчитывают средние частоты всех поддиапазонов по формуле ƒν = Δƒ(2ν - 1)/2. Определяют эталонные значения ППИП (блок 3) для средних частот всех поддиапазонов ƒν. В качестве ППИП используют значения разностей фаз сигналов  для всех возможных парных комбинаций антенных элементов в рамках антенной решетки 5.
для всех возможных парных комбинаций антенных элементов в рамках антенной решетки 5.
Выбор  в качестве ППИП основан на следующем. Одним из наиболее перспективных направлений развития измерителей пространственных параметров является использование интерферометрических пеленгаторов (см. Клименко Н.Н. Современное состояние теории и практики радиоинтерферометрии // Зарубежная радиоэлектроника, №1, 1990, с. 3-14). Интерферометры существуют двух типов: фазовые и корреляционные. В материалах Пат. US №4728959 «Радиопеленгационная система», МПК G01S 5/04, опубл. 08.08.1986 г. отмечается, что в сильно пересеченной местности и городских условиях в меньшей степени подлежат искажению фазовые параметры сигнала. Кроме того, Torrieri D.J. Principles of military communications system. Dedham. Massachusetts. Artech House, inc., 1981. - 298 p. отмечается, что: «потенциальные возможности оценки угла прихода сигнала путем сравнения фазы выше, чем у корреляционного интерферометра, если оцениваемый сигнал узкополосен и имеет малую нестабильность несущей частоты».
в качестве ППИП основан на следующем. Одним из наиболее перспективных направлений развития измерителей пространственных параметров является использование интерферометрических пеленгаторов (см. Клименко Н.Н. Современное состояние теории и практики радиоинтерферометрии // Зарубежная радиоэлектроника, №1, 1990, с. 3-14). Интерферометры существуют двух типов: фазовые и корреляционные. В материалах Пат. US №4728959 «Радиопеленгационная система», МПК G01S 5/04, опубл. 08.08.1986 г. отмечается, что в сильно пересеченной местности и городских условиях в меньшей степени подлежат искажению фазовые параметры сигнала. Кроме того, Torrieri D.J. Principles of military communications system. Dedham. Massachusetts. Artech House, inc., 1981. - 298 p. отмечается, что: «потенциальные возможности оценки угла прихода сигнала путем сравнения фазы выше, чем у корреляционного интерферометра, если оцениваемый сигнал узкополосен и имеет малую нестабильность несущей частоты».
В процессе расчета эталонных ППИП в блоке 3 моделируют размещение эталонного источника поочередно вокруг АС измерителя с дискретностью Δθ и Δβ на удалении нескольких длин волн. В блоке 3 по известному алгоритму (см. Пат. РФ №2283505, G01S 13/46, опубл. 24.05.2004 г., бюл. №30) вычисляют значение разностей фаз  , которые в дальнейшем хранятся во втором блоке памяти 2 (см. фиг. 6).
, которые в дальнейшем хранятся во втором блоке памяти 2 (см. фиг. 6).
В процессе работы устройства с помощью блоков 5-16 осуществляют поиск и обнаружение сигналов ИРИ в заданной полосе частот ΔF. Принимаемые решеткой 5 сигналы на частоте ƒν поступают на соответствующие входы антенного коммутатора 6. В задачу последнего входит обеспечение синхронного подключения в едином промежутке времени любых пар антенных элементов к опорному и сигнальному выходам. В результате последовательно во времени на оба входа двухканального приемника 7 поступают сигналы со всех возможных пар антенных элементов (АЭ) решетки 5. При этом все антенные элементы периодически выступают как в качестве сигнальных, так и в качестве опорных (при условии использования полнодоступного коммутатора 6). Этим достигается максимальный набор статистики о пространственных параметрах электромагнитного поля.
Сигналы, поступившие на входы приемника 7, усиливают, фильтруют и переносят на промежуточную частоту, например 10,7 МГц. С опорного и сигнального выходов промежуточной частоты блока 7 сигналы поступают на соответствующие входы аналого-цифрового преобразователя (АЦП) 8, где их синхронно преобразуют в цифровую форму. Полученные цифровые отсчеты сигналов антенных элементов  и Ah в блоке 8 перемножают на цифровые отсчеты двух гармонических сигналов одной и той же частоты, сдвинутые друг относительно друга на π/2. В результате в блоке 8 формируют четыре последовательности отсчетов (квадратурные составляющие отсчетов от двух АЭ и Ah). Для реализации необходимой импульсной характеристики цифровых фильтров в АЦП 8 выполняют операцию перемножения отсчетов каждой квадратурной составляющей сигнала на соответствующие отсчеты временного окна. Порядок выполнения этих операций подробно рассмотрен в Пат. РФ №2263328 и Пат РФ №2283505.
и Ah в блоке 8 перемножают на цифровые отсчеты двух гармонических сигналов одной и той же частоты, сдвинутые друг относительно друга на π/2. В результате в блоке 8 формируют четыре последовательности отсчетов (квадратурные составляющие отсчетов от двух АЭ и Ah). Для реализации необходимой импульсной характеристики цифровых фильтров в АЦП 8 выполняют операцию перемножения отсчетов каждой квадратурной составляющей сигнала на соответствующие отсчеты временного окна. Порядок выполнения этих операций подробно рассмотрен в Пат. РФ №2263328 и Пат РФ №2283505.
На завершающем этапе в блоке 8 формируют две комплексные последовательности отсчетов путем попарного объединения соответствующих отсчетов скорректированных последовательностей, которые поступают на входы блока преобразования Фурье 9.
В результате выполнения в блоке 9 операции в соответствии с выражением  получают две преобразованные последовательности, характеризующие спектры сигналов, принимаемых в АЭ
получают две преобразованные последовательности, характеризующие спектры сигналов, принимаемых в АЭ  и Ah, а следовательно, и их фазовые характеристики. Однако этого недостаточно для измерения в парах и Ah. Последнее предполагает вычисление функции взаимной корреляции сигналов в соответствии с выражением
и Ah, а следовательно, и их фазовые характеристики. Однако этого недостаточно для измерения в парах и Ah. Последнее предполагает вычисление функции взаимной корреляции сигналов в соответствии с выражением

где  , h=1, 2, …, N, ≠h - номер АЭ. На его основе определяют как
, h=1, 2, …, N, ≠h - номер АЭ. На его основе определяют как

Эти функции выполняются блоком вычисления ППИП 10. В предлагаемом устройстве измеренное значение очередным импульсом генератора 1 записывают в первый блок памяти 11. Данная операция повторяется до тех пор, пока не будут записаны в блок 11 значения ППИП для всех возможных сочетаний пар АЭ. Выполнение этой операции соответствует формированию массива измеренных ППИП  .
.
Основное назначение блоков 12, 13, 14, 15, 16 и 2, 3 состоит в том, чтобы оценить отличия измеренных параметров от эталонных значений , рассчитанных для всех направлений прихода сигнала Δθk и Δβk и всех ƒν.

По аналогии с прототипом данную операцию осуществляют следующим образом. Эталонные значения , хранящиеся в запоминающем устройстве 2, поступают на вход уменьшаемого блока вычитания 12 (см. фиг. 6). На вход вычитаемого блока 12 поступают измеренные значения с выхода блока 11. Операция вычитания осуществляется в строгом соответствии с порядком формирования пар АЭ.
На следующем этапе полученные разности возводят в квадрат в блоке 13. Данная операция необходима для того, чтобы все результаты операции вычитания имели положительное значение. В противном случае могла возникнуть бы ситуация, когда сумма положительных и отрицательных разностей компенсировали друг друга. Для возведения в квадрат каждый результат вычислений умножают на себя в блоке 13. Полученные квадраты разностей складывают в сумматоре 14 и записывают в третий блок памяти 15. В результате в блоке 15 формируют массив данных Hθ,β(ƒν), на основе которого получают пространственные параметры θi и βi в системе координат АС. Эта операция осуществляется блоком 16 путем поиска минимальной суммы minHθ,β(ƒν) в массиве данных Hθ,β(ƒν). Очередным импульсом синхронизации генератора 1 значения θi и βi из блока 16 по соответствующим выходам поступает на первую и вторую группы информационных входов первого вычислителя 17. После этого содержимое первого 11 и третьего 15 блоков памяти обнуляют и начинают новый цикл измерения пространственных параметров θi+1 и βi+1.
В функции первого вычислителя входит преобразование пространственных параметров ЛПС  в геоцентрическую систему координат
в геоцентрическую систему координат  в соответствии с (2). Кроме того, блок 17 осуществляет преобразование вектора направления на s-й ИРИ
в соответствии с (2). Кроме того, блок 17 осуществляет преобразование вектора направления на s-й ИРИ  в левостороннюю систему декартовых координат
в левостороннюю систему декартовых координат  в соответствии с выражением (3). Для реализации этих функций на первую группу информационных входов блока 17 поступает значение θi и на вторую группу информационных входов - βi, а на третью группу информационных входов - пространственное параметры ЛПС:
в соответствии с выражением (3). Для реализации этих функций на первую группу информационных входов блока 17 поступает значение θi и на вторую группу информационных входов - βi, а на третью группу информационных входов - пространственное параметры ЛПС:  ,
, и
и  с группы информационных выходов навигатора 34.
с группы информационных выходов навигатора 34.
Результаты преобразований  с группы информационных выходов блока 17 поступают на первую группу информационных входов второго вычислителя 18. В функции блока 18 входит коррекция вектора направления на s-й ИРИ
с группы информационных выходов блока 17 поступают на первую группу информационных входов второго вычислителя 18. В функции блока 18 входит коррекция вектора направления на s-й ИРИ  на основе априорно известной ориентации антенной системы измерителя относительно борта ЛПС. Последняя поступает по второй входной установочной шине 32 на информационные входы четвертого блока памяти 33, представляющего собой буферное запоминающее устройство. С информационных выходов блока 33 значения {kant, , ζant} следуют на вторую группу информационных входов второго вычислителя 18. Скорректированный вектор
на основе априорно известной ориентации антенной системы измерителя относительно борта ЛПС. Последняя поступает по второй входной установочной шине 32 на информационные входы четвертого блока памяти 33, представляющего собой буферное запоминающее устройство. С информационных выходов блока 33 значения {kant, , ζant} следуют на вторую группу информационных входов второго вычислителя 18. Скорректированный вектор  находят путем последовательного умножения вектора
находят путем последовательного умножения вектора  на три соответствующие углам Эйлера матрицы поворота в соответствии с (4).
на три соответствующие углам Эйлера матрицы поворота в соответствии с (4).
Значение скорректированного вектора  с выходов блока 18 поступает на первую группу информационных входов третьего вычислителя 19. В функции этого блока входит определение уточненного вектора направления на s-й ИРИ
с выходов блока 18 поступает на первую группу информационных входов третьего вычислителя 19. В функции этого блока входит определение уточненного вектора направления на s-й ИРИ  с учетом измеренных в момент времени ti пространственных углов ЛПС: крена
с учетом измеренных в момент времени ti пространственных углов ЛПС: крена  , тангажа
, тангажа  и склонения
и склонения  . Для этого используют нормальную систему координат. В результате на вторую группу информационных входов с информационных выходов блока угловой ориентации ЛПС 35 подают значения углов {, , }i, характеризующих ориентацию ЛПС в пространстве в момент измерения заявляемым устройством параметров ИРИ {θ, β}i. Определение уточненного вектора направления на s-й ИРИ
. Для этого используют нормальную систему координат. В результате на вторую группу информационных входов с информационных выходов блока угловой ориентации ЛПС 35 подают значения углов {, , }i, характеризующих ориентацию ЛПС в пространстве в момент измерения заявляемым устройством параметров ИРИ {θ, β}i. Определение уточненного вектора направления на s-й ИРИ  в блоке 19 выполняют в соответствии с выражением (5). Следует отметить, что информация о пространственном положении ЛПС {, , }i, определяемая радионавигатором 34 используется в блоке 35 для нахождения угловой ориентации ЛПС {, , }i. По этой причине она поступает с группы информационных выходов блока 34 на первую группу информационных входов блока 35.
в блоке 19 выполняют в соответствии с выражением (5). Следует отметить, что информация о пространственном положении ЛПС {, , }i, определяемая радионавигатором 34 используется в блоке 35 для нахождения угловой ориентации ЛПС {, , }i. По этой причине она поступает с группы информационных выходов блока 34 на первую группу информационных входов блока 35.
Уточненное значение вектора направления на s-й ИРИ  с информационных выходов блока 19 далее следует на первую группу информационных входов четвертого вычислителя 20. В функции блока 20 входит уточнение азимутального угла
с информационных выходов блока 19 далее следует на первую группу информационных входов четвертого вычислителя 20. В функции блока 20 входит уточнение азимутального угла  Пространственный угол
Пространственный угол  находят из (5) в соответствии с выражением (6). Для обеспечения вычислений на вторую группу информационных входов блока 20 поступают значения
находят из (5) в соответствии с выражением (6). Для обеспечения вычислений на вторую группу информационных входов блока 20 поступают значения  с группы информационных выходов радионавигатора 34.
с группы информационных выходов радионавигатора 34.
Значение уточненного азимутального угла  с группы информационных выходов блока 20 поступает на первую группу информационных входов шестого блока памяти 21 и первую группу информационных входов второго блока сравнения 39. На вторые группы информационных входов блоков 21 и 39 поступает информация о текущем местоположении ЛПС {, }i с группы информационных выходов радионавигатора 34. На третьей группе информационных входов блока 39 присутствует информация о границах зоны поиска ИРИ первого уровня (B, L)1, поступающая с группы информационных выходов блока 38.
с группы информационных выходов блока 20 поступает на первую группу информационных входов шестого блока памяти 21 и первую группу информационных входов второго блока сравнения 39. На вторые группы информационных входов блоков 21 и 39 поступает информация о текущем местоположении ЛПС {, }i с группы информационных выходов радионавигатора 34. На третьей группе информационных входов блока 39 присутствует информация о границах зоны поиска ИРИ первого уровня (B, L)1, поступающая с группы информационных выходов блока 38.
В функцию блока 39 входит принятие решения о прохождении очередного пеленга  через зону поиска ИРИ первого уровня (B, L)1 на основе поступивших исходных данных:
через зону поиска ИРИ первого уровня (B, L)1 на основе поступивших исходных данных:  , (B, L)1 и (, )i. В случае положительного результата на выходе блока 39 формируется импульс, поступающий на управляющий вход шестого блока памяти 21. В результате в него записывается информация о полученном значении азимутального угла
, (B, L)1 и (, )i. В случае положительного результата на выходе блока 39 формируется импульс, поступающий на управляющий вход шестого блока памяти 21. В результате в него записывается информация о полученном значении азимутального угла  и координатах ЛПС (, )i, полученных в i-й момент времени.
и координатах ЛПС (, )i, полученных в i-й момент времени.
Под действием очередного тактового импульса блока 1 данные о  и (, )i поступают на вторую группу информационных входов пятого вычислителя 22. Пройдя через блок 22 (с его первого информационного выхода) они далее следуют на вторую группу информационных входов восьмого блока памяти 24 (представляет собой буферное запоминающее устройство) и сохраняются в нем. Кроме того, эта информация используется в блоке 22 для нахождения j-й контрольной точки с наибольшим количеством проходящих рядом пеленгов
и (, )i поступают на вторую группу информационных входов пятого вычислителя 22. Пройдя через блок 22 (с его первого информационного выхода) они далее следуют на вторую группу информационных входов восьмого блока памяти 24 (представляет собой буферное запоминающее устройство) и сохраняются в нем. Кроме того, эта информация используется в блоке 22 для нахождения j-й контрольной точки с наибольшим количеством проходящих рядом пеленгов  . На третью группу его информационных входов блока 22 с группы информационных выходов девятого вычислителя 44 поступают данные о географических координатах всех контрольных точек первого уровня (B, L)j, j=1, 2, …, J. На первую группу информационных входов пятого вычислителя 22 по четвертой входной установочной шине 23 поступает значение радиуса R локальной зоны анализа вокруг каждой j-й контрольной точки первого уровня.
. На третью группу его информационных входов блока 22 с группы информационных выходов девятого вычислителя 44 поступают данные о географических координатах всех контрольных точек первого уровня (B, L)j, j=1, 2, …, J. На первую группу информационных входов пятого вычислителя 22 по четвертой входной установочной шине 23 поступает значение радиуса R локальной зоны анализа вокруг каждой j-й контрольной точки первого уровня.
На основе полученных исходных данных в функции пятого вычислителя 22 входит определение контрольной точки j зоны поиска ИРИ первого уровня с наибольшим количеством проходящих рядом пеленгов  в пределах локальной зоны с радиусом R.
в пределах локальной зоны с радиусом R.
Координаты найденной в блоке 22 j-й контрольной точки  с максимальным значением проходящих рядом пеленгов
с максимальным значением проходящих рядом пеленгов  с второй группы информационных выходов поступают на первую группу седьмого вычислителя 40. На вторую группу информационных входов блока 40 по девятой входной установочной шине 42 задают размеры зоны поиска ИРИ второго уровня {B2, L2}. В качестве центра последней блоком 40 используются координаты j-й контрольной точки. Блок 40 предназначен для расчета географических координат границ второй зоны поиска ИРИ (B, L)2. Полученные результаты с группы информационных выходов блока 40 поступают на первую группу информационных входов восьмого вычислителя 41. На вторую группу его информационных входов по десятой входной установочной шине 43 задают количество М контрольных точек второго уровня. Блок 41 предназначен для равномерного размещения М контрольных точек в пределах зоны поиска ИРИ второго уровня (B, L)2 и определения их географических координат (B, L)m.
с второй группы информационных выходов поступают на первую группу седьмого вычислителя 40. На вторую группу информационных входов блока 40 по девятой входной установочной шине 42 задают размеры зоны поиска ИРИ второго уровня {B2, L2}. В качестве центра последней блоком 40 используются координаты j-й контрольной точки. Блок 40 предназначен для расчета географических координат границ второй зоны поиска ИРИ (B, L)2. Полученные результаты с группы информационных выходов блока 40 поступают на первую группу информационных входов восьмого вычислителя 41. На вторую группу его информационных входов по десятой входной установочной шине 43 задают количество М контрольных точек второго уровня. Блок 41 предназначен для равномерного размещения М контрольных точек в пределах зоны поиска ИРИ второго уровня (B, L)2 и определения их географических координат (B, L)m.
Значения найденных координат с группы информационных выходов блока 41 поступают на группу информационных входов пятого блока памяти 26. Последний представляет собой буферное запоминающее устройство.
С приходом очередного синхроимпульса блока 1 содержимое блока 26 поступает на вторую группу информационных входов шестого вычислителя 27. На первую группу его информационных входов поступает последовательность значений азимутального угла  , i=1, 2, …, I совместно с соответствующими координатами ЛПС (, )i с группы информационных выходов блока 24. По шестой входной установочной шине 30 задают значение радиуса R'≥Δr/2 локальной зоны анализа вокруг m-ных контрольных точек зоны поиска ИРИ второго уровня, m=1, 2, …, М. В задачу блока 27 входит определение контрольной точки m, m∈М, зоны поиска ИРИ второго уровня с наибольшим количеством Ψj проходящих рядом пеленгов
, i=1, 2, …, I совместно с соответствующими координатами ЛПС (, )i с группы информационных выходов блока 24. По шестой входной установочной шине 30 задают значение радиуса R'≥Δr/2 локальной зоны анализа вокруг m-ных контрольных точек зоны поиска ИРИ второго уровня, m=1, 2, …, М. В задачу блока 27 входит определение контрольной точки m, m∈М, зоны поиска ИРИ второго уровня с наибольшим количеством Ψj проходящих рядом пеленгов  в пределах локальной зоны с радиусом R', R'<<R. Количество Ψj прошедших рядом с m-ной контрольной точкой пеленгов
в пределах локальной зоны с радиусом R', R'<<R. Количество Ψj прошедших рядом с m-ной контрольной точкой пеленгов  , подсчитанное блоком 27, с первой группы информационных выходов поступает на первую группу информационных входов блока принятия решения 28. На вторую группу информационных входов последнего с помощью седьмой установочной шины 31 поступает пороговое значение η, определенное на подготовительном этапе. С помощью величины η можно судить о надежности полученных координат ИРИ. На второй группе информационных выходов блока 27 формируют значения
, подсчитанное блоком 27, с первой группы информационных выходов поступает на первую группу информационных входов блока принятия решения 28. На вторую группу информационных входов последнего с помощью седьмой установочной шины 31 поступает пороговое значение η, определенное на подготовительном этапе. С помощью величины η можно судить о надежности полученных координат ИРИ. На второй группе информационных выходов блока 27 формируют значения  и (, )i, необходимые для расчета координат. Последние со второй группы информационных выходов блока 27 поступают на группу информационных входов блока расчета координат 29. При выполнении пороговых условий Ψj≥η на втором выходе блока 28 формируется импульс, поступающий на управляющие входы блоков 22 и 29. В результате исходная информация для расчета координат, поступившая от блока 27 записывается в буфер блока 29. Одновременно блок 22 возвращается в исходное состояние и готов к новому циклу поиска очередной контрольной точки первого уровня к с максимальным количеством (без учета точки j) рядом проходящих пеленгов
и (, )i, необходимые для расчета координат. Последние со второй группы информационных выходов блока 27 поступают на группу информационных входов блока расчета координат 29. При выполнении пороговых условий Ψj≥η на втором выходе блока 28 формируется импульс, поступающий на управляющие входы блоков 22 и 29. В результате исходная информация для расчета координат, поступившая от блока 27 записывается в буфер блока 29. Одновременно блок 22 возвращается в исходное состояние и готов к новому циклу поиска очередной контрольной точки первого уровня к с максимальным количеством (без учета точки j) рядом проходящих пеленгов  , k∈J.
, k∈J.
Блок 29 предназначен для расчета координат обнаруженных ИРИ (Bs, Ls) на основе выражений (7) и (8). После завершения расчетов на группе информационных выходов блока 29 (выходной шине устройства 46) формируют координаты s-го ИРИ (Bs, Ls).
Далее начинают новый цикл поиска и определения координат s+1 ИРИ. Пятый вычислитель 22 приступает к поиску очередной k-й, k∈J контрольной точки с максимальным среди оставшихся количеством проходящих рядом пеленгов  . Дальнейшая работа устройства осуществляется по выше написанному алгоритму.
. Дальнейшая работа устройства осуществляется по выше написанному алгоритму.
В случае наступления ситуации, когда пороговые условия в блоке 28 не выполняются (Ψj<η), на первом его выходе формируется управляющий импульс, поступающий на входы обнуления блоков 17, 18, 19, 20, 22. В результате заявляемое устройство возвращается в исходное состояние и готово к началу нового цикла работы. Синхронизация работы блоков заявляемого устройства обеспечивается импульсами генератора синхроимпульсов 1.
В устройстве (см. фиг. 6), реализующем предложенный способ, используют известные элементы и блоки, описанные в научно-технической литературе. Блоки с 1 по 20, 33-35 выполняют аналогично соответствующим блокам устройства-прототипа.
Варианты исполнения антенных элементов и антенной решетки 5 широко рассмотрены в литературе (см. Саидов А.С. и др. Проектирование фазовых автоматических радиопеленгаторов. - М.: Радио и связь. 1997; Torrieri D.J. Principles of military communications system. Dedham. Massachusetts. Artech House, inc., 1981. - 298 p.). Тип используемых антенных элементов определяется местом размещения антенной решетки 5. Под фюзеляжем в антенной системе, как правило, используют ненаправленные антенные элементы. При размещении антенной решетки 5 в других местах применяют направленные АЭ. В качестве последних могут быть использованы широкополосные трехдиапазонные рупорно-микрополосковые антенны (см. Пат. РФ №2360338, Пат. РФ №2345453, а также Пат. РФ №2349005, Пат. РФ №2382450). Антенные коммутаторы 6 широко известны (см. Вениаминов В.Н. и др. Микросхемы и их применение. - М.: Радио и связь, 1989. - 240 с.; Вайсблат А.В. Коммутационные устройства СВЧ на полупроводниковых диодах. - М.: Радио и связь, 1987. - 120 с.) Двухканальный приемник 7 может быть реализован с помощью двух профессиональных приемников типа IC-R8500 фирмы ICOM (см. Communication Receiver IC-R8500. Instruction Manual). При этом первый и второй гетеродины одного из приемников используют одновременно в качестве первого и второго гетеродинов соответственно второго приемника. Кроме того, в качестве приемника 7 могут попарно использоваться и другие приемники фирмы ICOM: IC-R7000, IC-R1000.
Двухканальный АЦП 8 и блок преобразования Фурье 9, а также блок вычисления ППИП 10, первое запоминающее устройство 11 могут быть реализованы с помощью стандартных плат: субмодуля цифрового приема ADMDDC2WB и ADP60PCI ν.3.2 на процессоре Shark ADSP-21062 (см. руководство пользователя e-mail:insys@arc.ru www-сервер www.insys.ru).
Построение генератора синхроимпульсов 1 известно и широко освещено в литературе (см. Радиоприемные устройства: учебное пособие для радиотехн. спец. ВУЗов / Ю.Т. Давыдов и др.; Высшая школа, 1989. - 342 с.; Функциональные узлы адаптивных компенсаторов помех: Часть II. В.В. Никитченко. - Л.: ВАС. - 1990. - 176 с.).
С помощью блоков 12, 13 и 14 реализуют выражение (11) описания. Варианты выполнения сумматора 14, блока вычитания 12 приведены, например, в (Ред Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: пер. с нем. - М: Мир, 1990. - 256 с.).
Второе 2 и третье 15 запоминающие устройства реализуют по известным схемам (см. Большие интегральные схемы запоминающих устройств: Справочник / А.Ю. Горденов и др. - М.: Радио и связь, 1990. - 288 с.; Лебедев О.Н. Микросхемы памяти и их применение. - М.: Радио и связь, 1990. - 160 с.).
Умножитель 13 реализует операцию возведения в квадрат, а его выполнение освещено в (Ред Э. Справочное пособие по высокочастотной схемотехнике. Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
Блок формирования эталонных ППИП предназначен для создания таблиц эталонных значений разностей фаз для различных пар АЭ решетки 5 и различных поддиапазонов ν. На подготовительном этапе по входной установочной шине 4 задают следующие исходные данные:
сектор обработки по азимуту (θmin, θmax) и углу места (βmin, βmax);
точность нахождения угловых параметров Δθ и Δβ;
удаление эталонного источника D;
топология размещения АЭ {rn} где rn={Xn,Yn,Zn}.
Задача блока 3 состоит в том, чтобы для данного подвижного пеленгатора, каждого частотного поддиапазона ΔF для заданной топологии антенной решетки 5 с дискретностью по азимуту Δθ и углу места Δβ рассчитать идеальные (эталонные) значения разностей фаз для всех пар антенных элементов с учетом того, что эталонный источник перемещается на удаление D от решетки. Блок 3 может быть реализован в виде автомата на базе микропроцессора (см. Шевкоплес Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 512 с.) и работающего в соответствии с алгоритмом, приведенным на фиг. 7. В качестве последнего целесообразно использовать 16-разрядный микропроцессор Л1810ВМ86.
Реализация блока определения азимута и угла места 16 известна и широко освещена в литературе. Предназначен для поиска минимальной суммы Hθ,β(ƒν) и может быть реализован по пирамидальной схеме с использованием быстродействующих компараторов (см. Шевкоплес Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 512 с.).
Реализация четвертого 33, пятого 26 и восьмого 24 блоков памяти трудностей не вызывает. Блоки 26 и 33 представляют собой буферные запоминающие устройства и могут быть реализованы аналогично блоку 2.
Радионавигатор 34 предназначен для измерения путевого угла  , широты
, широты  , долготы
, долготы  и высоты
и высоты  нахождения ЛПС в момент времени ti (момент измерения параметров угловой ориентации ЛПС и местоположения ИРИ). Данная функция может быть реализована с помощью навигатора GPS (см. Garmin. GPS навигаторы 12, 12XL, 12СХ. Руководство пользователя www.jj.connect.ru).
нахождения ЛПС в момент времени ti (момент измерения параметров угловой ориентации ЛПС и местоположения ИРИ). Данная функция может быть реализована с помощью навигатора GPS (см. Garmin. GPS навигаторы 12, 12XL, 12СХ. Руководство пользователя www.jj.connect.ru).
Первый 17, второй 18, третий 19 и четвертый 20 вычислители предназначены для определения истинного вектора направления на s-й ИРИ  в геоцентрической системе координат, а также значение азимутального угла (см. фиг. 4). Это достигается благодаря учету ориентации АС измерителя относительно борта ЛПС и собственно угловой ориентации ЛПС в пространстве. Каждый из вычислителей выполняет строго определенные в выражениях (2-7) операции, реализация которых сложностей не вызывает. Для повышения быстродействия названные блоки могут быть реализованы на программируемых постоянных запоминающих устройствах, например серии К541 и К500. Алгоритмы работы блоков 17-20 приведены на фиг. 8-11. Для уменьшения массогабаритных характеристик, потребляемого тока блоки 17, 18, 19 и 20 целесообразно реализовать на специализированном микропроцессоре TMS320c6416 (см. TMS320c6416: http://focus/ti/com/docs/prod/folers/print/TMS320c6416.html), алгоритм работы которого приведен на фиг. 4. Одновременно на микропроцессоре TMS320c6416 могут быть реализованы блоки 12-16.
в геоцентрической системе координат, а также значение азимутального угла (см. фиг. 4). Это достигается благодаря учету ориентации АС измерителя относительно борта ЛПС и собственно угловой ориентации ЛПС в пространстве. Каждый из вычислителей выполняет строго определенные в выражениях (2-7) операции, реализация которых сложностей не вызывает. Для повышения быстродействия названные блоки могут быть реализованы на программируемых постоянных запоминающих устройствах, например серии К541 и К500. Алгоритмы работы блоков 17-20 приведены на фиг. 8-11. Для уменьшения массогабаритных характеристик, потребляемого тока блоки 17, 18, 19 и 20 целесообразно реализовать на специализированном микропроцессоре TMS320c6416 (см. TMS320c6416: http://focus/ti/com/docs/prod/folers/print/TMS320c6416.html), алгоритм работы которого приведен на фиг. 4. Одновременно на микропроцессоре TMS320c6416 могут быть реализованы блоки 12-16.
Блок угловой ориентации ЛПС 35 предназначен для измерения пространственных параметров ЛПС: крена  , тангажа
, тангажа  и склонения
и склонения  . Реализация блока 35 известна (см. Пат. РФ №2374659, Пат. РФ №2371733, Пат. РФ 2553270) и трудностей не вызывает. Изготовление блока 30 на дискретных элементах нецелесообразно из-за недостаточного быстродействия, значительных габаритных размеров, большого веса и потребляемой энергии. В связи с этим блок 35 совместно с блоками 12-16, 17-20 и 33 целесообразно реализовать на одном сигнальном процессоре TMS320c6416 (см. http://focus/ti/com/docs/prod/folers/print/TMS320c6416.html).
. Реализация блока 35 известна (см. Пат. РФ №2374659, Пат. РФ №2371733, Пат. РФ 2553270) и трудностей не вызывает. Изготовление блока 30 на дискретных элементах нецелесообразно из-за недостаточного быстродействия, значительных габаритных размеров, большого веса и потребляемой энергии. В связи с этим блок 35 совместно с блоками 12-16, 17-20 и 33 целесообразно реализовать на одном сигнальном процессоре TMS320c6416 (см. http://focus/ti/com/docs/prod/folers/print/TMS320c6416.html).
Пятый вычислитель 22 предназначен для определения контрольной точки J зоны поиска ИРИ первого уровня с наибольшим количеством проходящих рядом пеленгов  в пределах локальной зоны с радиусом R. С этой целью на первую группу информационных входов блока 22 по четвертой входной шине 23 задают значение R. Данная операция выполняется на подготовительном этапе. На вторую группу информационных входов с группы информационных выходов шестого блока памяти 21 поступают значения азимутальных углов
в пределах локальной зоны с радиусом R. С этой целью на первую группу информационных входов блока 22 по четвертой входной шине 23 задают значение R. Данная операция выполняется на подготовительном этапе. На вторую группу информационных входов с группы информационных выходов шестого блока памяти 21 поступают значения азимутальных углов  совместно с координатами ЛПС {, }i. На третью группу информационных входов блока 22 следуют значения координат (В, L)j всех J контрольных точек первого уровня, j=1, 2, …, J. Пятый вычислитель 22 формирует локальные зоны анализа радиусом R вокруг каждой j-й контрольной точки, прокладывает пеленги
совместно с координатами ЛПС {, }i. На третью группу информационных входов блока 22 следуют значения координат (В, L)j всех J контрольных точек первого уровня, j=1, 2, …, J. Пятый вычислитель 22 формирует локальные зоны анализа радиусом R вокруг каждой j-й контрольной точки, прокладывает пеленги  с учетом местоположения ЛПС в ti - момент времени и осуществляет подсчет пеленгов
с учетом местоположения ЛПС в ti - момент времени и осуществляет подсчет пеленгов  , проходящих через эти локальные зоны первого уровня (см. Приложение 1). Далее полученные результаты ранжируются. На второй группе его информационных выходов вначале формируется значение координат j-й контрольной точки с максимальным количеством проходящих рядом пеленгов
, проходящих через эти локальные зоны первого уровня (см. Приложение 1). Далее полученные результаты ранжируются. На второй группе его информационных выходов вначале формируется значение координат j-й контрольной точки с максимальным количеством проходящих рядом пеленгов  . Далее следуют координаты k-й точки (B, L)k, уступающей по количеству рядом проходящих пеленгов
. Далее следуют координаты k-й точки (B, L)k, уступающей по количеству рядом проходящих пеленгов  только j-й контрольной точке и т.д. На первой группе информационных выходов блока 22 формируют (ретранслируются) значения
только j-й контрольной точке и т.д. На первой группе информационных выходов блока 22 формируют (ретранслируются) значения  и соответствующие им координаты ЛПС {, }i, поступившие на вычислитель по второй группе информационных входов от блока 21.
и соответствующие им координаты ЛПС {, }i, поступившие на вычислитель по второй группе информационных входов от блока 21.
Реализация блока 22 трудностей не вызывает. Целесообразно реализовать на сигнальном процессоре TMS 320с6416 совместно с блоками 17-20. Алгоритм работы блока 22 приведен на фиг. 12.
Шестой вычислитель 27 выполняет аналогичные с блоком 22 функции и предназначен для определения контрольной точки m, m∈М, зоны поиска ИРИ второго уровня с наибольшим количеством Ψj проходящих в пределах зоны с радиусом R', R'<<R, пеленгов  . Для этого на первую группу его информационных входов поступают значения пеленгов
. Для этого на первую группу его информационных входов поступают значения пеленгов  и координаты ЛПС {, }i с группы информационных выходов восьмого блока памяти 24. На вторую группу его информационных входов поступают координаты М контрольных точек поиска ИРИ второго уровня (B, L)m, m=1, 2, …, М. По третьей группе информационных входов блока 27 на подготовительном этапе задают значение радиуса R' локальной зоны анализа по шестой входной установочной шине 30. Алгоритм работы блока 27 и его реализация во многом совпадает с реализацией пятого вычислителя 22. Отличие состоит в том, что на первой группе информационных выходов формируется значение Ψj рядом проходящих с m-й контрольной точкой пеленгов
и координаты ЛПС {, }i с группы информационных выходов восьмого блока памяти 24. На вторую группу его информационных входов поступают координаты М контрольных точек поиска ИРИ второго уровня (B, L)m, m=1, 2, …, М. По третьей группе информационных входов блока 27 на подготовительном этапе задают значение радиуса R' локальной зоны анализа по шестой входной установочной шине 30. Алгоритм работы блока 27 и его реализация во многом совпадает с реализацией пятого вычислителя 22. Отличие состоит в том, что на первой группе информационных выходов формируется значение Ψj рядом проходящих с m-й контрольной точкой пеленгов  . А на второй группе информационных выходов присутствуют только значения пеленгов
. А на второй группе информационных выходов присутствуют только значения пеленгов  (из их общего числа
(из их общего числа  ) и соответствующие им координаты ЛПС {, }i. Может быть реализован на втором сигнальном процессоре TMS 320с6416, а алгоритм работы блока 27 приведен на фиг. 13.
) и соответствующие им координаты ЛПС {, }i. Может быть реализован на втором сигнальном процессоре TMS 320с6416, а алгоритм работы блока 27 приведен на фиг. 13.
Седьмой вычислитель 40 предназначен для определения границ зоны поиска ИРИ второго уровня (B, L)2 с центром с координатами  контрольной точки j. Для этого на первую группу информационных входов блока 40 подают координаты
контрольной точки j. Для этого на первую группу информационных входов блока 40 подают координаты  со второй группы информационных выходов пятого вычислителя 22. По второй группе информационных входов блока 40 на подготовительном этапе по входной установочной шине 42 задают размеры зоны поиска ИРИ второго уровня {В2, L2}. Размеры {B2, L2} для всех контрольных точек j, j=1, 2, …, J является величиной постоянной и как правило задается в метрах. Блок 40 рассчитывает географические границы зоны поиска ИРИ (B, L)2 второго уровня на основе поступивших значений и {B2, L2}.
со второй группы информационных выходов пятого вычислителя 22. По второй группе информационных входов блока 40 на подготовительном этапе по входной установочной шине 42 задают размеры зоны поиска ИРИ второго уровня {В2, L2}. Размеры {B2, L2} для всех контрольных точек j, j=1, 2, …, J является величиной постоянной и как правило задается в метрах. Блок 40 рассчитывает географические границы зоны поиска ИРИ (B, L)2 второго уровня на основе поступивших значений и {B2, L2}.
Реализация блока 40 трудностей не вызывает. Может быть реализован совместно с блоком 27 на втором сигнальном процессоре TMS 320с6416, а алгоритм работы блока 40 приведен на фиг. 14.
Восьмой вычислитель 41 предназначен для равномерного распределения на площади (B, L)2 и определения координат (B, L)m контрольных точек зоны поиска ИРИ второго уровня, m=1, 2, …, М. Для реализации названных функций на первую группу информационных входов поступают географические координаты (B, L)2 зоны поиска ИРИ второго уровня (задаются координаты угловых точек зоны).
По второй группе информационных входов блока 41 на подготовительном этапе задают (вторая шина 43) количество М контрольных точек. В связи с тем, что площадь зоны поиска ИРИ второго уровня постоянна, количество М контрольных точек (иначе, расстояние между ними Δr) определяют заданную точность местоопределения ИРИ. На основе полученных исходных данных блок 41 равномерно распределяет М контрольных точек на площади (В, L)2 с интервалом Δr меду ними и определяет их географические координаты (B, L)m. Реализация блока 41 трудностей не вызывает. Может быть реализован совместно с блоками 40 и 27 на втором сигнальном процессоре TMS 320с6416, а алгоритм работы блока приведен на фиг. 15.
Девятый вычислитель 44 предназначен для равномерного распределения и определения координат (B, L)j контрольных точек j зоны поиска ИРИ первого уровня, j=1, 2, … J. Для реализации названных функций (аналогичных блоку 41) на его первую группу информационных входов поступают географические координаты (B, L)1 зоны поиска ИРИ первого уровня с группы информационных выходов блока 38. Данная информация задается на подготовительном этапе через восьмую входную установочную шину 37 и хранится в блоке 38. На вторую группу информационных входов по входной установочной шине 45 на подготовительном этапе задают количество J контрольных точек зоны поиска ИРИ первого уровня. На основе полученных исходных данных блок 44 рассчитывает необходимые расстояния d между контрольными точками j, преобразует d в угловые координаты, определяет географические координаты (B, L)j контрольных точек j, j=1, 2, … J зоны поиска ИРИ первого уровня. Реализация блока 44 в основном совпадает с реализацией блока 41 и может быть реализован совместно с блоками 27, 40 и 41 на втором сигнальном процессоре TMSc6416, а алгоритм блока приведен на фиг. 16.
Блок сравнения 39 предназначен для принятия решения о прохождении очередного пеленга  через зону поиска ИРИ первого уровня (B, L)1. С этой целью на его первую группу информационных входов поступают значения пеленгов
через зону поиска ИРИ первого уровня (B, L)1. С этой целью на его первую группу информационных входов поступают значения пеленгов  группы информационных выходов блока 20. На вторую группу информационных входов приходят данные о соответствующем местоположении ЛПС {, }i с группы информационных выходов блока 34. На третью группу информационных входов блока 39 поступают данные о границах зоны поиска ИРИ первого уровня с группы информационных выходов блока 38. На основе поступивших данных о
группы информационных выходов блока 20. На вторую группу информационных входов приходят данные о соответствующем местоположении ЛПС {, }i с группы информационных выходов блока 34. На третью группу информационных входов блока 39 поступают данные о границах зоны поиска ИРИ первого уровня с группы информационных выходов блока 38. На основе поступивших данных о  и {, }i блок 39 принимает решение о прохождении пеленгов
и {, }i блок 39 принимает решение о прохождении пеленгов  через зону поиска ИРИ первого уровня (B, L)1. В случае принятия положительного решения на выходе блока 39 формируется управляющий сигнал (импульс), разрешающий запись значений и {, }i в шестой блок памяти 21. Реализация блока 39 известна и трудностей не вызывает. Может быть реализован на программируемых постоянных запоминающих устройствах, например серии К541 или К500, в виде автомата.
через зону поиска ИРИ первого уровня (B, L)1. В случае принятия положительного решения на выходе блока 39 формируется управляющий сигнал (импульс), разрешающий запись значений и {, }i в шестой блок памяти 21. Реализация блока 39 известна и трудностей не вызывает. Может быть реализован на программируемых постоянных запоминающих устройствах, например серии К541 или К500, в виде автомата.
Блок принятия решения 28 предназначен для принятия решения о достаточности полученных измерений  для определения координат блоком 29. Представляет собой блок сравнения, на первую группу информационных входов которого поступает значение Ψj о количестве полученных пеленгов на s-й ИРИ. На вторую группу его информационных входов по седьмой входной установочной шине 31 на подготовительном этапе задается пороговое значение η. В случае выполнения пороговых условий Ψj≥η на втором выходе блока 28 формируется управляющий сигнал (импульс), разрешающий блоку 29 приступить к расчету координат s-го ИРИ. В противном случае Ψj<η на первом выходе блока 28 формируется импульс, поступающий на входы обнуления блоков 17-20,22 и 24 обнуляя их содержимое. Может быть реализован на дискретных элементах (элементарной логике) по известным схемам (см. Рэд Э. Справочное пособие по высокочастотной схемотехнике. Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
для определения координат блоком 29. Представляет собой блок сравнения, на первую группу информационных входов которого поступает значение Ψj о количестве полученных пеленгов на s-й ИРИ. На вторую группу его информационных входов по седьмой входной установочной шине 31 на подготовительном этапе задается пороговое значение η. В случае выполнения пороговых условий Ψj≥η на втором выходе блока 28 формируется управляющий сигнал (импульс), разрешающий блоку 29 приступить к расчету координат s-го ИРИ. В противном случае Ψj<η на первом выходе блока 28 формируется импульс, поступающий на входы обнуления блоков 17-20,22 и 24 обнуляя их содержимое. Может быть реализован на дискретных элементах (элементарной логике) по известным схемам (см. Рэд Э. Справочное пособие по высокочастотной схемотехнике. Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
Блок расчета координат 29 предназначен для расчета координат в соответствии с выражениями (7) и (8). Для реализации своих функций на его группу информационных входов поступают данные о пеленге  и соответствующие координаты ЛПС со второй группы информационных выходов блока 27. К расчету координат блок 29 приступает после прихода управляющего сигнала со второго выхода блока 28. Рассчитанные значения координат Bs и Ls s-го ИРИ поступают на выходную шину устройства 46. Реализация блока 29 трудностей не вызывает. Может быть реализован на программируемых постоянных запоминающих устройствах, например, серии К541 или К500. Алгоритм работы блока 29 приведен на фиг. 17. Для уменьшения массогабаритных характеристик, обеспечения достаточного быстродействия и уменьшения потребляемой энергии блоки 39, 28 и 29 целесообразно реализовать совместно с блоками 21, 22, 27, 40, 41 и 44 на втором сигнальном процессоре TMS 320c6416 (см. TMS320c6416: http://focus/ti/com/docs/prod/folders/print/TMS320c6416.html).
и соответствующие координаты ЛПС со второй группы информационных выходов блока 27. К расчету координат блок 29 приступает после прихода управляющего сигнала со второго выхода блока 28. Рассчитанные значения координат Bs и Ls s-го ИРИ поступают на выходную шину устройства 46. Реализация блока 29 трудностей не вызывает. Может быть реализован на программируемых постоянных запоминающих устройствах, например, серии К541 или К500. Алгоритм работы блока 29 приведен на фиг. 17. Для уменьшения массогабаритных характеристик, обеспечения достаточного быстродействия и уменьшения потребляемой энергии блоки 39, 28 и 29 целесообразно реализовать совместно с блоками 21, 22, 27, 40, 41 и 44 на втором сигнальном процессоре TMS 320c6416 (см. TMS320c6416: http://focus/ti/com/docs/prod/folders/print/TMS320c6416.html).
Приложение 1
Методика определения факта прохождения пеленга  через локальную зону
через локальную зону
Операция определения прохождения пеленга  через окружность заданного радиуса R (локальную зону) выполняется большое количество раз - для каждого пеленга
через окружность заданного радиуса R (локальную зону) выполняется большое количество раз - для каждого пеленга  необходимо проверить его прохождение через J зон. По этой причине сделан ряд допущений, которые значительно ускоряют эту процедуру без ощутимого влияния на результат работы всего алгоритма. Первое допущение - работа на плоскости при определении углов. Второе допущение - использование тригонометрических формул малых углов. Оба допущения могут внести незначительную погрешность в оценку количества пеленгов проходящих через локальную зону, но не могут повлиять на определение района сосредоточения пеленгов.
необходимо проверить его прохождение через J зон. По этой причине сделан ряд допущений, которые значительно ускоряют эту процедуру без ощутимого влияния на результат работы всего алгоритма. Первое допущение - работа на плоскости при определении углов. Второе допущение - использование тригонометрических формул малых углов. Оба допущения могут внести незначительную погрешность в оценку количества пеленгов проходящих через локальную зону, но не могут повлиять на определение района сосредоточения пеленгов.
С этой целью определяют расстояние между точкой начала пеленга (, )i,. и центром окружности (В, L)j:

где Lэ - длина экватора.
Далее определяют половину угла визирования, т.е. угла, выходящего из точки начала пеленга (, )i и касающегося двумя лучами окружности с разных сторон.

где R - это радиус исходной окружности.
На следующем этапе вычисляют направление из точки начала пеленга на центр окружности:

На завершающем этапе определяют прохождение пеленга  через окружность радиусом R путем сравнения разницы между пеленгом
через окружность радиусом R путем сравнения разницы между пеленгом  и направлением на центр окружности θj с половиной угла визирования. Пеленг
и направлением на центр окружности θj с половиной угла визирования. Пеленг  проходит через j-ю локальную зону, если справедливо неравенство
проходит через j-ю локальную зону, если справедливо неравенство

где  - это разница между углами с учетом перехода через 360° (т.е. расстояние между 10° и 350° равно 20°).
- это разница между углами с учетом перехода через 360° (т.е. расстояние между 10° и 350° равно 20°).

Приложение 2
Методика минимизации временных затрат на расчет координат ИРИ
Идея предлагаемого способа заключается в определении точки в геоцентрической системе координат, сумма квадратов расстояний от которой до всех пеленгов  минимальна:
минимальна:
где Bs и Ls - соответственно широта и долгота местоположения s-го ИРИ;



 - азимутальная составляющая пеленга i-го измерения;
- азимутальная составляющая пеленга i-го измерения;
 ,
,  - соответственно широта и долгота начала пеленга
- соответственно широта и долгота начала пеленга  i-го измерения (координаты ЛПС в ti момент времени);
i-го измерения (координаты ЛПС в ti момент времени);
Ψ - количество измерений.
Для уменьшения количества операций выполняют предварительный расчет:
 ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Далее рассчитываются коэффициенты ai, ci, и bi для каждого измерения i в соответствии с (П. 2.3), (П. 2.4) и (П. 2.5).
На следующем этапе находят суммы произведений коэффициентов:
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Координаты искомой точки в геоцентрической системе координат находят из следующих выражений:
d=аа⋅bb-ab⋅ab
ν=ac⋅ab-aa⋅bc;
u=ab⋅bc-ac⋅bb.
Координаты искомой точки s-го ИРИ в географической системе координат принимают вид:
Bs=arctg2(ν, u);
Ls=arctg2(d⋅cos Bs, u).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство определения координат источников радиоизлучения | 2018 |
|
RU2700767C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2536609C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2465613C1 |
| Способ определения географических координат источников радиоизлучения в многоцелевой обстановке | 2021 |
|
RU2773307C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2458360C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2009 |
|
RU2419162C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2011 |
|
RU2469408C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2009 |
|
RU2427000C1 |
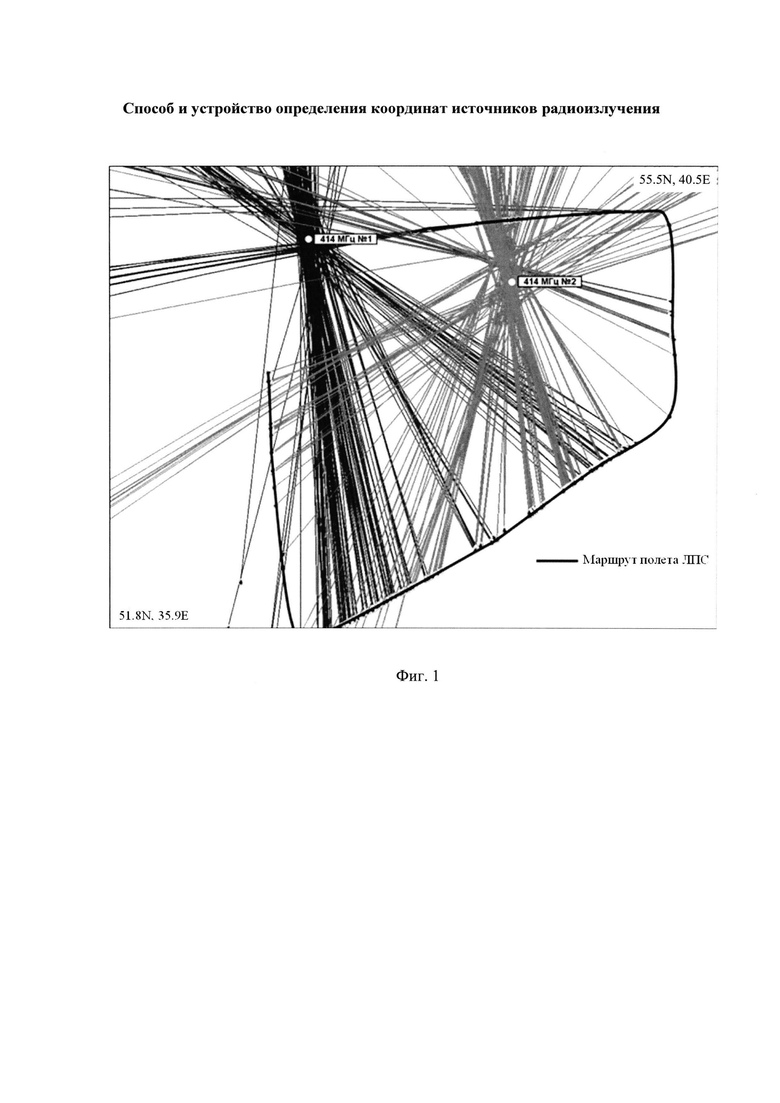
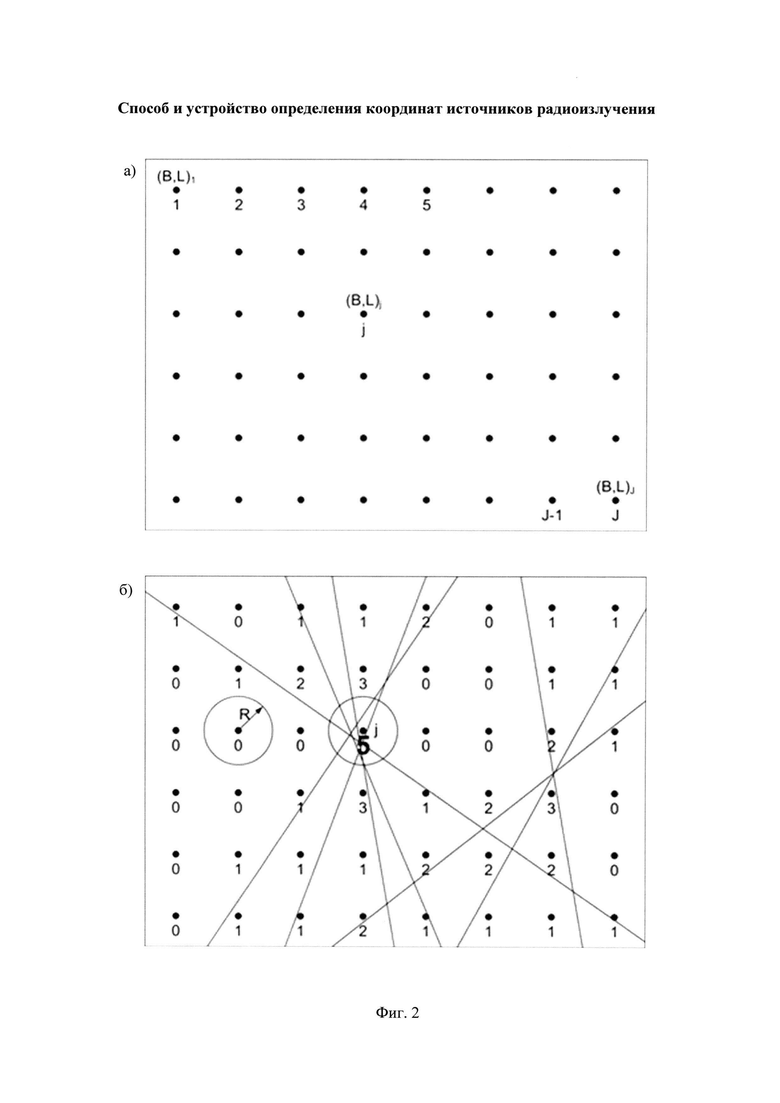
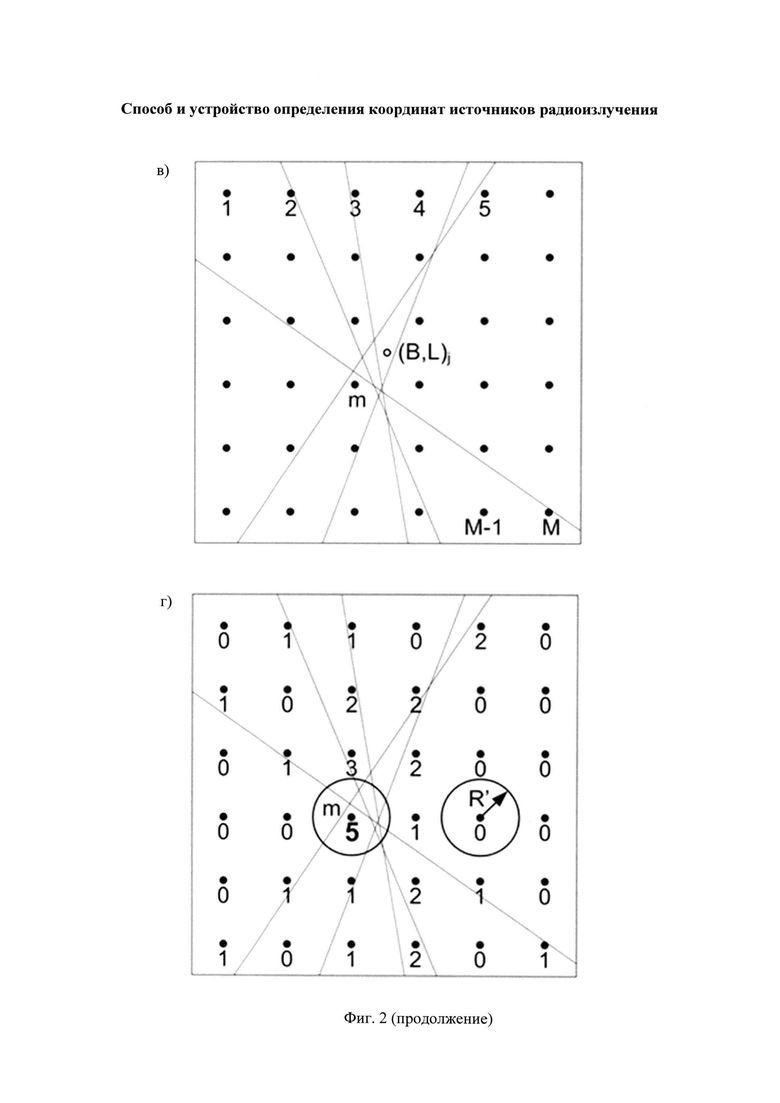
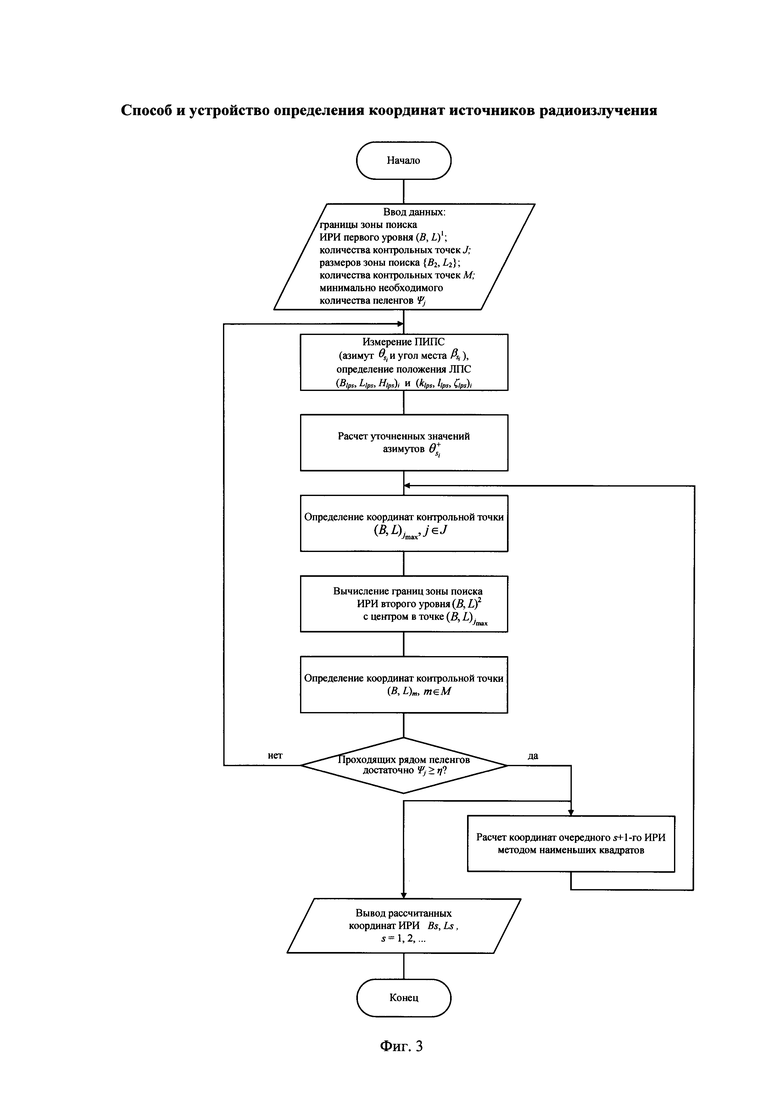
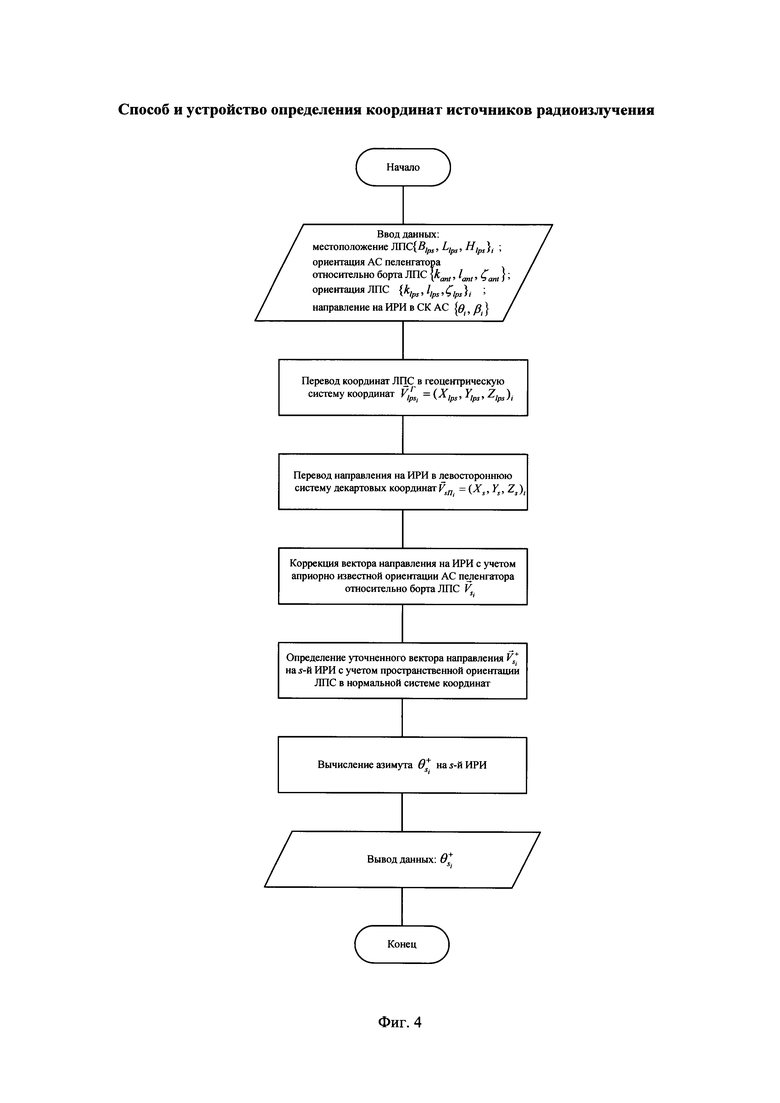

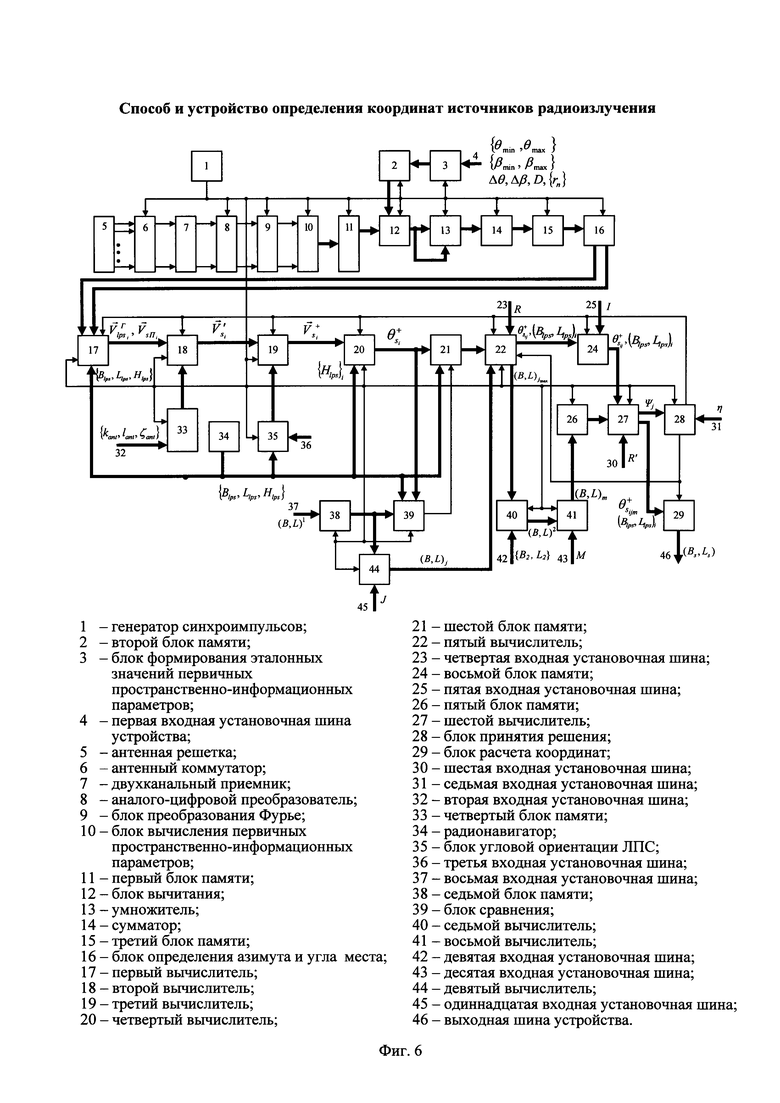
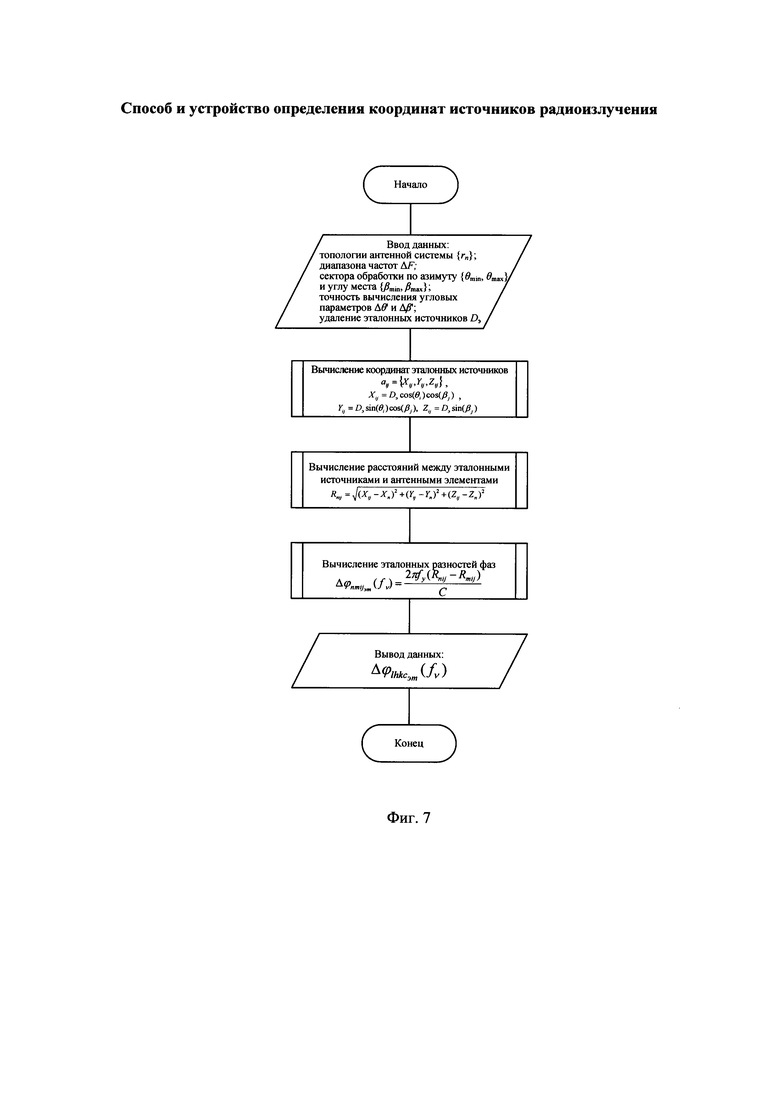


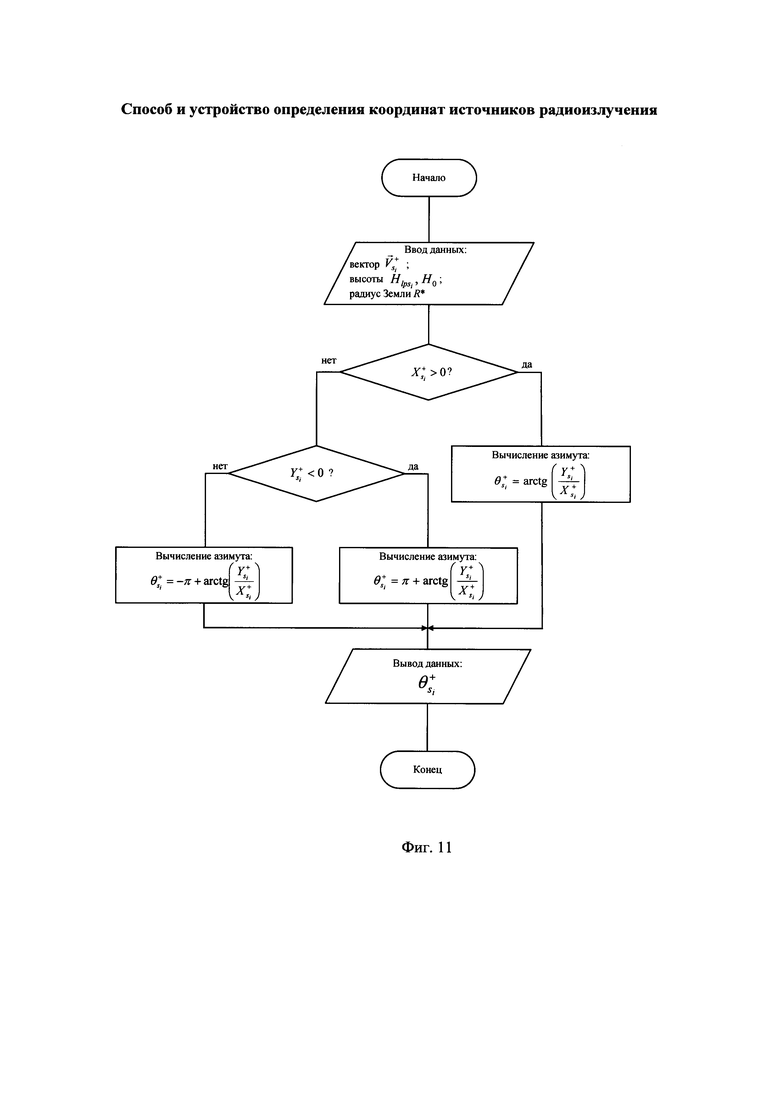
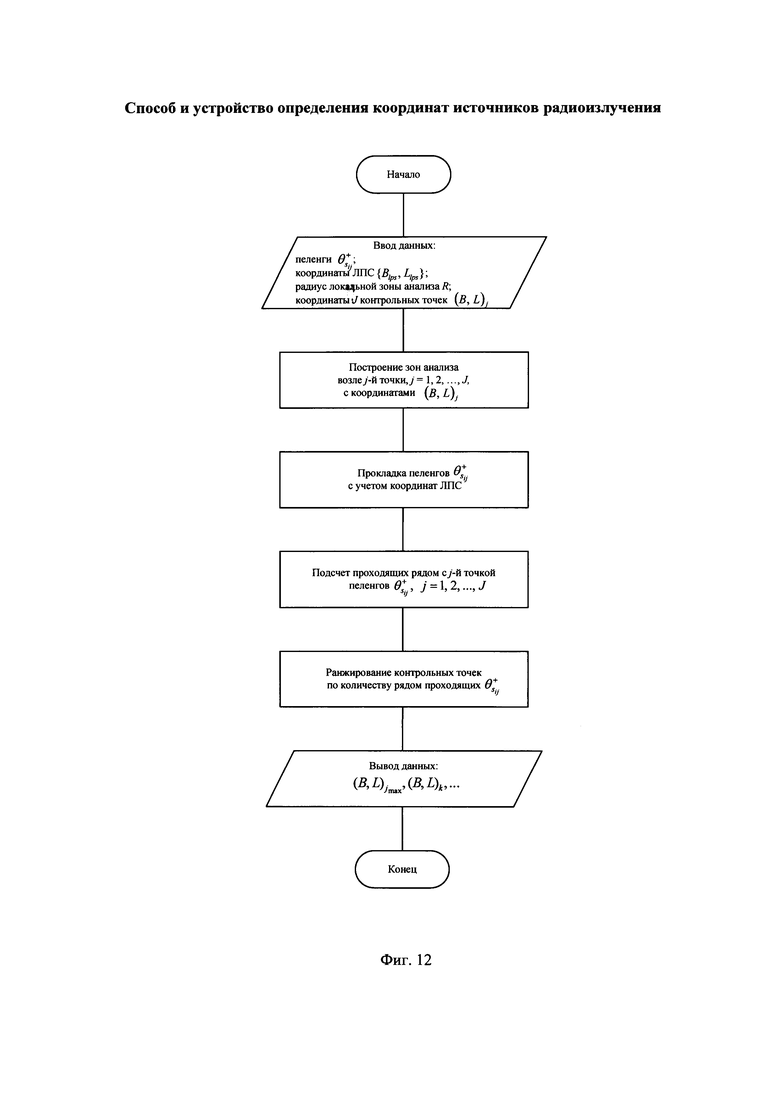
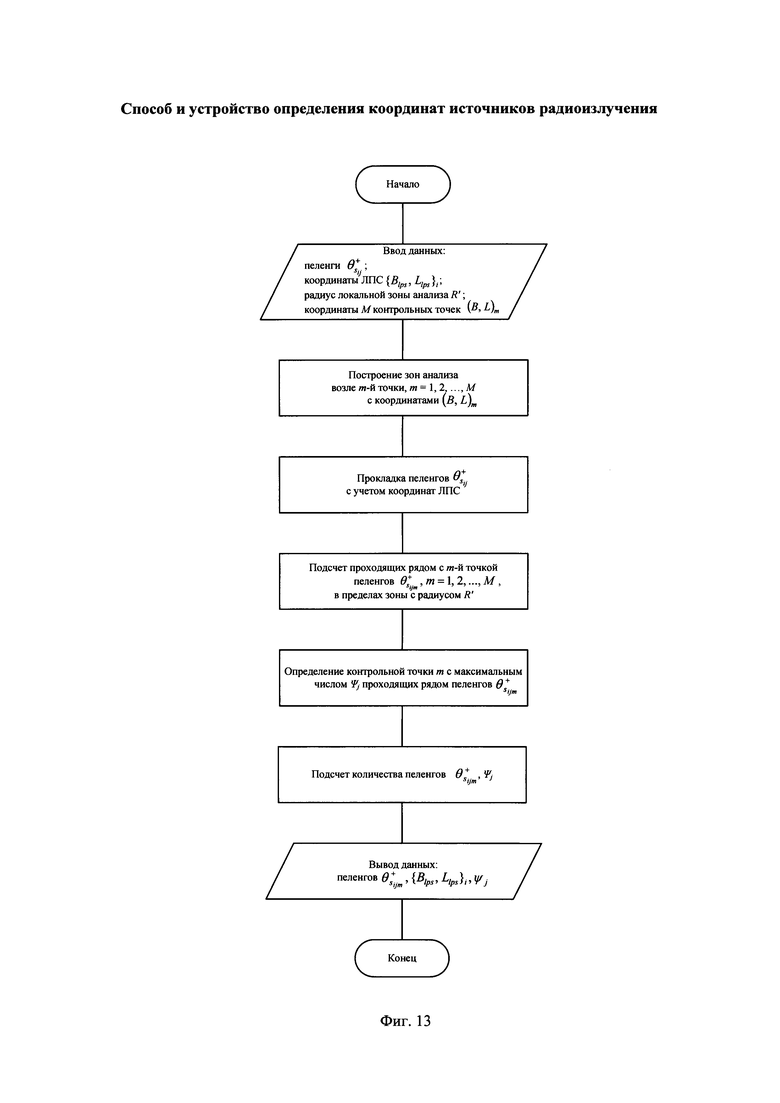

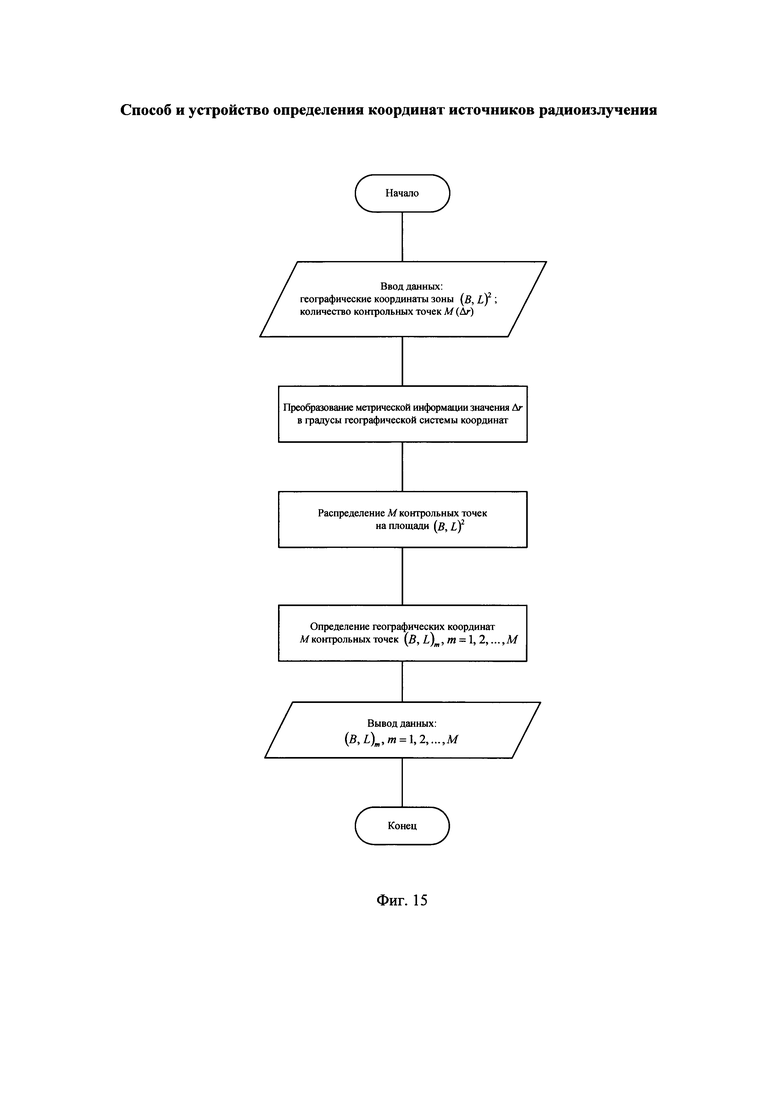
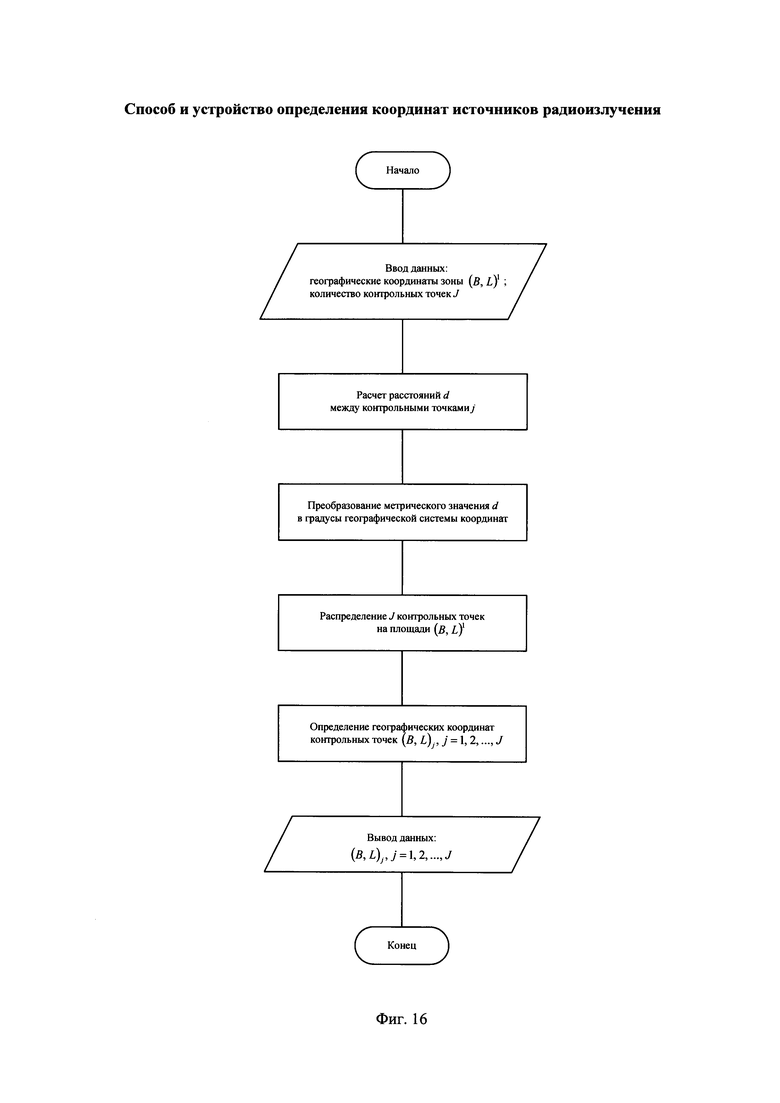
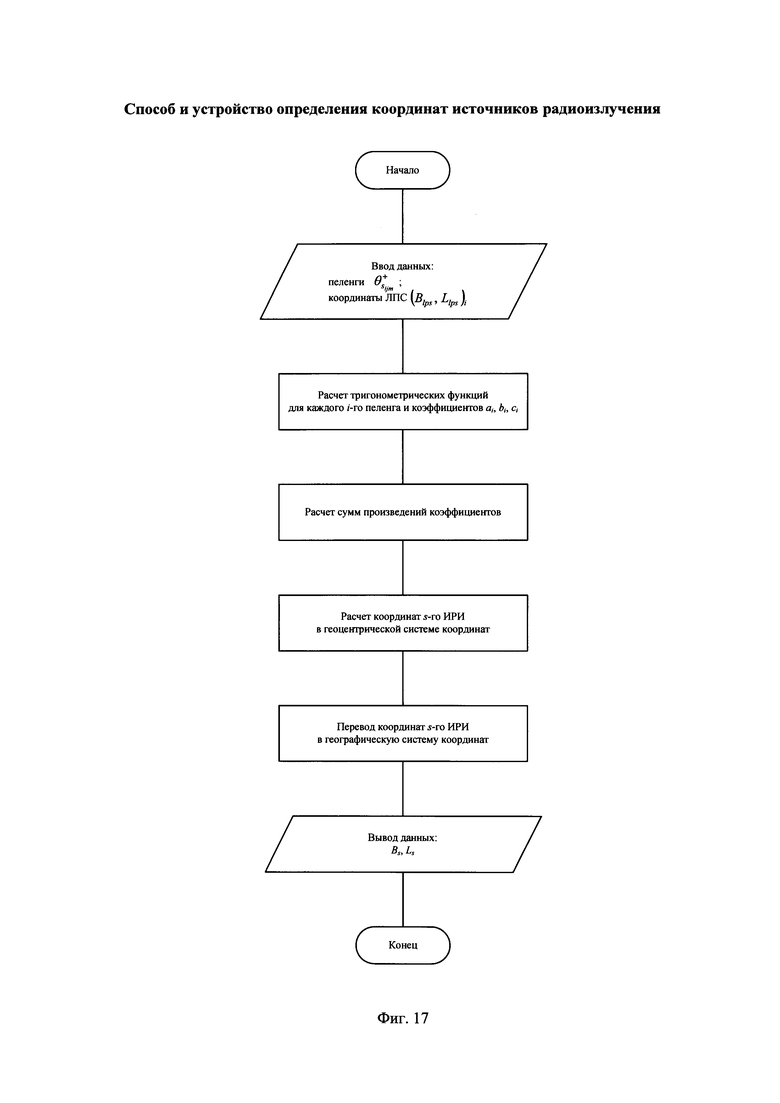
Изобретения относятся к радиотехнике и могут быть использованы для определения местоположения источников радиоизлучения (ИРИ) с летно-подъемного средства (ЛПС) угломерным способом. Достигаемым техническим результатом является сокращение временных затрат на определение координат ИРИ. Технический результат достигается путем выполнения расчетов в геоцентрической системе координат, не требующим измерения угла места. Выполнение этой операции осуществляют аналитически, что и определяет высокую скорость вычислений. Кроме того, избирательная (в два этапа) обработка входного потока данных позволяет дополнительно повысить скорость их анализа при сохранении точностных характеристик. Устройство определения координат ИРИ, реализующее способ, содержит двухканальный фазовый интерферометр, девять вычислителей, восемь блоков памяти, радионавигатор, устройство угловой ориентации ЛПС, блок сравнения, блок принятия решения, блок расчета координат, одиннадцать входных установочных шин и выходную шину, определенным образом соединенные между собой. 2 н. и 1 з.п. ф-лы, 17 ил., 2 прил.
1. Способ определения координат источников радиоизлучения (ИРИ), заключающийся в том, что принимают сигналы ИРИ в заданной полосе частот ΔF перемещающимся в пространстве бортовым пеленгатором, установленным на летно-подъемном средстве (ЛПС), измеряют пространственно-информационные параметры обнаруженных сигналов: азимут  (пеленг) и угол места
(пеленг) и угол места  в системе координат антенной системы с одновременным определением местоположения ЛПС
в системе координат антенной системы с одновременным определением местоположения ЛПС  в момент времени ti, где Blps, Llps, Hlps - соответственно широта, долгота и высота ЛПС, преобразуют координаты ЛПС
в момент времени ti, где Blps, Llps, Hlps - соответственно широта, долгота и высота ЛПС, преобразуют координаты ЛПС  в геоцентрическую систему координат
в геоцентрическую систему координат  , а вектор направления на s-й ИРИ
, а вектор направления на s-й ИРИ  в левостороннюю систему декартовых координат
в левостороннюю систему декартовых координат  , корректируют вектор направления на s-й ИРИ
, корректируют вектор направления на s-й ИРИ  с учетом априорно известной ориентации антенной системы бортового пеленгатора относительно ЛПС {kant, lant, ζant}, где kant, lant, ζant - соответственно углы крена, тангажа и склонения антенной системы, путем последовательного умножения значений
с учетом априорно известной ориентации антенной системы бортового пеленгатора относительно ЛПС {kant, lant, ζant}, где kant, lant, ζant - соответственно углы крена, тангажа и склонения антенной системы, путем последовательного умножения значений  на соответствующие углам Эйлера матрицы поворота, после чего в нормальной системе координат вычисляют уточненное значение вектора направления
на соответствующие углам Эйлера матрицы поворота, после чего в нормальной системе координат вычисляют уточненное значение вектора направления  на s-й ИРИ с учетом измеренных в момент времени ti пространственных углов ЛПС: крена
на s-й ИРИ с учетом измеренных в момент времени ti пространственных углов ЛПС: крена  , тангажа
, тангажа  и склонения
и склонения  определяют уточненное значение азимута
определяют уточненное значение азимута  в момент времени ti на s-й ИРИ, расположенной на поверхности «круглой Земли», отличающийся тем, что дополнительно на подготовительном этапе задают в географических координатах границы зоны поиска ИРИ первого уровня (B,L)1, на поверхности которой равномерно распределяют J, J≥10, контрольных точек, для каждой j-й контрольной точки, j=1, 2, …, J, первого уровня определяют ее географические координаты (B,L)j, а в процессе работы определяют контрольную точку j первого уровня с наибольшим количеством проходящих в пределах локальной зоны с радиусом R пеленгов
в момент времени ti на s-й ИРИ, расположенной на поверхности «круглой Земли», отличающийся тем, что дополнительно на подготовительном этапе задают в географических координатах границы зоны поиска ИРИ первого уровня (B,L)1, на поверхности которой равномерно распределяют J, J≥10, контрольных точек, для каждой j-й контрольной точки, j=1, 2, …, J, первого уровня определяют ее географические координаты (B,L)j, а в процессе работы определяют контрольную точку j первого уровня с наибольшим количеством проходящих в пределах локальной зоны с радиусом R пеленгов  , выделяют зону поиска ИРИ второго уровня (B,L)2, центром которой являются координаты
, выделяют зону поиска ИРИ второго уровня (B,L)2, центром которой являются координаты  j-й контрольной точки зоны поиска ИРИ первого уровня, а ее размеры по широте и долготе задают на подготовительном этапе и соответствуют расстоянию между контрольными точками зоны поиска ИРИ первого уровня, на поверхности зоны поиска ИРИ второго уровня равномерно распределяют М, М≥10 контрольных точек с определенным на подготовительном этапе шагом Δr, значение которого задают с учетом необходимой точности измерения координат ИРИ, определяют их географические координаты (B,L)m, находят контрольную точку m, m∈М, зоны поиска ИРИ второго уровня с наибольшим количеством Ψj проходящих в пределах локальной зоны с радиусом R'≥Δr/2 пеленгов
j-й контрольной точки зоны поиска ИРИ первого уровня, а ее размеры по широте и долготе задают на подготовительном этапе и соответствуют расстоянию между контрольными точками зоны поиска ИРИ первого уровня, на поверхности зоны поиска ИРИ второго уровня равномерно распределяют М, М≥10 контрольных точек с определенным на подготовительном этапе шагом Δr, значение которого задают с учетом необходимой точности измерения координат ИРИ, определяют их географические координаты (B,L)m, находят контрольную точку m, m∈М, зоны поиска ИРИ второго уровня с наибольшим количеством Ψj проходящих в пределах локальной зоны с радиусом R'≥Δr/2 пеленгов  , сравнивают количество Ψj полученных пеленгов
, сравнивают количество Ψj полученных пеленгов  с заданным на подготовительном этапе порогом η, при выполнении пороговых условий Ψj≥η на основе выделенных Ψj значений пеленгов
с заданным на подготовительном этапе порогом η, при выполнении пороговых условий Ψj≥η на основе выделенных Ψj значений пеленгов  методом наименьших квадратов определяют географические координаты s-го ИРИ (Bs, Ls), выделяют очередную k-ю контрольную точку первого уровня, k∈J, c наибольшим после j-й точки количеством Ψk проходящих в пределах локальной зоны с радиусом R' пеленгов
методом наименьших квадратов определяют географические координаты s-го ИРИ (Bs, Ls), выделяют очередную k-ю контрольную точку первого уровня, k∈J, c наибольшим после j-й точки количеством Ψk проходящих в пределах локальной зоны с радиусом R' пеленгов  и выполняют новый цикл анализа по обнаружению s+1-го ИРИ и определению его координат (Bs+1, Ls+1), в противном случае при Ψk<η завершают анализ полученных результатов и приступают к новому циклу приема сигналов в заданных полосе ΔF и зоне поиска ИРИ первого уровня и измерению их пространно-информационных параметров.
и выполняют новый цикл анализа по обнаружению s+1-го ИРИ и определению его координат (Bs+1, Ls+1), в противном случае при Ψk<η завершают анализ полученных результатов и приступают к новому циклу приема сигналов в заданных полосе ΔF и зоне поиска ИРИ первого уровня и измерению их пространно-информационных параметров.
2. Способ по п. 1, отличающийся тем, что определение местоположения ИРИ выполняют в геоцентрической системе координат, сумма квадратов расстояний от которого до всех пеленгов (ортодромов на сфере) минимальна.
3. Устройство определения координат источников радиоизлучения (ИРИ), содержащее антенную решетку, выполненную из N>2 идентичных антенных элементов, расположенных в плоскости пеленгования, антенный коммутатор, N входов которого подключены к соответствующим N выходам антенной решетки, а сигнальный и опорный выходы коммутатора подключены соответственно к сигнальному и опорному входам двухканального приемника, выполненного по схеме с общими гетеродинами, аналого-цифровой преобразователь, выполненный двухканальным соответственно с сигнальным и опорным каналами, причем сигнальный и опорный выходы промежуточной частоты двухканального приемника соединены соответственно с сигнальным и опорным входами аналого-цифрового преобразователя, блок преобразования Фурье, выполненный двухканальным соответственно с сигнальным и опорным каналами, сигнальный и опорный входы которого соединены соответственно с сигнальным и опорным выходами аналого-цифрового преобразователя, первый и второй блоки памяти, блок вычитания, блок формирования эталонных значений первичных пространственно-информационных параметров (ППИП), блок вычисления ППИП, первый информационный вход которого соединен с сигнальным выходом блока преобразования Фурье, а второй информационный вход - с опорным выходом блока преобразования Фурье, группа информационных выходов блока вычисления ППИП соединена с группой информационных входов первого блока памяти, группа информационных выходов которого соединена с группой входов вычитаемого блока вычитания, группа входов уменьшаемого которого соединена с группой информационных выходов второго блока памяти, группа информационных входов которого соединена с группой информационных выходов блока формирования эталонных значений ППИП, группа информационных входов которого является первой входной установочной шиной устройства определения координат ИРИ, последовательно соединенные умножитель, сумматор, третий блок памяти, блок определения азимута и угла места, причем первая и вторая группы информационных входов умножителя объединены поразрядно и соединены с группой информационных выходов блока вычитания, первый вычислитель, предназначенный для перевода пространственных параметров летно-подъемного средства (ЛПС)  в геоцентрическую систему координат
в геоцентрическую систему координат  , а вектора направления на s-й ИРИ
, а вектора направления на s-й ИРИ  - в левостороннюю систему декартовых координат
- в левостороннюю систему декартовых координат  , второй вычислитель, предназначенный для коррекции вектора направления на s-й ИРИ
, второй вычислитель, предназначенный для коррекции вектора направления на s-й ИРИ  с учетом априорно известной ориентации антенной системы бортового пеленгатора
с учетом априорно известной ориентации антенной системы бортового пеленгатора  , третий вычислитель, предназначенный для вычисления в нормальной системе координат уточненного вектора направления
, третий вычислитель, предназначенный для вычисления в нормальной системе координат уточненного вектора направления  на s-й ИРИ с учетом измеренных в момент времени ti пространственных углов ЛПС, четвертый вычислитель, предназначенный для вычисления значений азимутального угла
на s-й ИРИ с учетом измеренных в момент времени ti пространственных углов ЛПС, четвертый вычислитель, предназначенный для вычисления значений азимутального угла  , пятый, шестой, седьмой и восьмой вычислители, четвертый и пятый блоки памяти, радионавигатор, вторая, третья, четвертая, пятая и шестая входные установочные шины устройства определения координат ИРИ, блок сравнения и блок угловой ориентации ЛПС, предназначенный для измерения углов крена
, пятый, шестой, седьмой и восьмой вычислители, четвертый и пятый блоки памяти, радионавигатор, вторая, третья, четвертая, пятая и шестая входные установочные шины устройства определения координат ИРИ, блок сравнения и блок угловой ориентации ЛПС, предназначенный для измерения углов крена  , тангажа
, тангажа  и склонения
и склонения  ЛПС, причем первый, второй, третий и четвертый вычислители подключены последовательно, первая и вторая группы информационных входов первого вычислителя соединены соответственно с первой и второй группами информационных выходов блока определения азимута и угла места, третья группа информационных входов первого вычислителя объединена со второй группой информационных входов четвертого вычислителя, первой группой информационных входов блока угловой ориентации ЛПС и группой информационных выходов радионавигатора, вторая входная установочная шина устройства определения координат ИРИ соединена с группой информационных входов четвертого блока памяти, группа информационных выходов которого соединена с второй группой информационных входов второго вычислителя, вход синхронизации которого объединен с выходом генератора синхроимпульсов и со входами синхронизации первого, третьего, четвертого, пятого, шестого, седьмого и восьмого вычислителей, первого, второго, третьего, четвертого и пятого блоков памяти, с управляющим входом антенного коммутатора, входами синхронизации аналого-цифрового преобразователя, блока преобразования Фурье, блока вычитания, умножителя, сумматора, блока определения азимута и угла места, блока формирования эталонных значений ППИП и блока вычисления ППИП, блока угловой ориентации ЛПС, группа информационных выходов которого соединена со второй группой информационных входов третьего вычислителя, а вторая группа информационных входов является третьей входной установочной шиной устройства определения координат ИРИ, первая группа информационных входов блока сравнения соединена с группой информационных выходов четвертого вычислителя, а входы обнуления первого, второго и третьего вычислителей объединены, отличающееся тем, что пятый вычислитель предназначен для определения контрольной точки j зоны поиска ИРИ первого уровня с наибольшим количеством проходящих в пределах локальной зоны с радиусом R пеленгов
ЛПС, причем первый, второй, третий и четвертый вычислители подключены последовательно, первая и вторая группы информационных входов первого вычислителя соединены соответственно с первой и второй группами информационных выходов блока определения азимута и угла места, третья группа информационных входов первого вычислителя объединена со второй группой информационных входов четвертого вычислителя, первой группой информационных входов блока угловой ориентации ЛПС и группой информационных выходов радионавигатора, вторая входная установочная шина устройства определения координат ИРИ соединена с группой информационных входов четвертого блока памяти, группа информационных выходов которого соединена с второй группой информационных входов второго вычислителя, вход синхронизации которого объединен с выходом генератора синхроимпульсов и со входами синхронизации первого, третьего, четвертого, пятого, шестого, седьмого и восьмого вычислителей, первого, второго, третьего, четвертого и пятого блоков памяти, с управляющим входом антенного коммутатора, входами синхронизации аналого-цифрового преобразователя, блока преобразования Фурье, блока вычитания, умножителя, сумматора, блока определения азимута и угла места, блока формирования эталонных значений ППИП и блока вычисления ППИП, блока угловой ориентации ЛПС, группа информационных выходов которого соединена со второй группой информационных входов третьего вычислителя, а вторая группа информационных входов является третьей входной установочной шиной устройства определения координат ИРИ, первая группа информационных входов блока сравнения соединена с группой информационных выходов четвертого вычислителя, а входы обнуления первого, второго и третьего вычислителей объединены, отличающееся тем, что пятый вычислитель предназначен для определения контрольной точки j зоны поиска ИРИ первого уровня с наибольшим количеством проходящих в пределах локальной зоны с радиусом R пеленгов  , шестой вычислитель предназначен для определения контрольной точки m, m∈М, зоны поиска ИРИ второго уровня с наибольшим количеством Ψj проходящих в пределах локальной зоны с радиусом R', R'<<R, пеленгов
, шестой вычислитель предназначен для определения контрольной точки m, m∈М, зоны поиска ИРИ второго уровня с наибольшим количеством Ψj проходящих в пределах локальной зоны с радиусом R', R'<<R, пеленгов  , седьмой вычислитель предназначен для определения границ зоны поиска ИРИ второго уровня (В,L)2 с центром с координатами контрольной точки j зоны поиска ИРИ первого уровня
, седьмой вычислитель предназначен для определения границ зоны поиска ИРИ второго уровня (В,L)2 с центром с координатами контрольной точки j зоны поиска ИРИ первого уровня  , восьмой вычислитель предназначен для равномерного распределения и определения координат (B,L)m контрольных точек m зоны поиска ИРИ второго уровня, m=1, 2, …, М, дополнительно введены девятый вычислитель, предназначенный для равномерного распределения и определения координат (B,L)j контрольных точек j, j=1, 2, …, J, зоны поиска ИРИ первого уровня, шестой, седьмой и восьмой блоки памяти, при этом блок сравнения предназначен для принятия решения о прохождении очередного пеленга
, восьмой вычислитель предназначен для равномерного распределения и определения координат (B,L)m контрольных точек m зоны поиска ИРИ второго уровня, m=1, 2, …, М, дополнительно введены девятый вычислитель, предназначенный для равномерного распределения и определения координат (B,L)j контрольных точек j, j=1, 2, …, J, зоны поиска ИРИ первого уровня, шестой, седьмой и восьмой блоки памяти, при этом блок сравнения предназначен для принятия решения о прохождении очередного пеленга  через зону поиска ИРИ первого уровня (B,L)1, группа информационных входов седьмого блока памяти является восьмой входной установочной шиной устройства определения координат ИРИ, предназначенной для задания границ зоны поиска ИРИ первого уровня (B,L)1, а группа информационных выходов соединена с третьей группой информационных входов блока сравнения и с первой группой информационных входов девятого вычислителя, вторая группа информационных входов которого является одиннадцатой входной установочной шиной устройства определения координат ИРИ, предназначенной для задания количества контрольных точек J, J≥10, зоны поиска ИРИ первого уровня, а группа информационных выходов девятого вычислителя соединена с третьей группой информационных входов пятого вычислителя, первая группа информационных входов которого является четвертой входной установочной шиной устройства определения координат ИРИ, предназначенной для задания радиуса R локальных зон поиска ИРИ первого уровня с центрами в контрольных точках j, j=1, 2, …, J, a вторая группа информационных входов соединена с группой информационных выходов шестого блока памяти, первая группа информационных входов которого соединена с группой информационных выходов четвертого вычислителя и первой группой информационных входов блока сравнения, вторая группа информационных входов которого соединена с группой информационных выходов радионавигатора и второй группой информационных входов шестого блока памяти, а выход блока сравнения соединен с входом управления шестого блока памяти, первая группа информационных выходов пятого вычислителя соединена с первой группой информационных входов восьмого блока памяти, вторая группа информационных входов которого является пятой входной установочной шиной устройства определения координат ИРИ и предназначена для задания максимально необходимого количества I используемых в обработке пеленгов
через зону поиска ИРИ первого уровня (B,L)1, группа информационных входов седьмого блока памяти является восьмой входной установочной шиной устройства определения координат ИРИ, предназначенной для задания границ зоны поиска ИРИ первого уровня (B,L)1, а группа информационных выходов соединена с третьей группой информационных входов блока сравнения и с первой группой информационных входов девятого вычислителя, вторая группа информационных входов которого является одиннадцатой входной установочной шиной устройства определения координат ИРИ, предназначенной для задания количества контрольных точек J, J≥10, зоны поиска ИРИ первого уровня, а группа информационных выходов девятого вычислителя соединена с третьей группой информационных входов пятого вычислителя, первая группа информационных входов которого является четвертой входной установочной шиной устройства определения координат ИРИ, предназначенной для задания радиуса R локальных зон поиска ИРИ первого уровня с центрами в контрольных точках j, j=1, 2, …, J, a вторая группа информационных входов соединена с группой информационных выходов шестого блока памяти, первая группа информационных входов которого соединена с группой информационных выходов четвертого вычислителя и первой группой информационных входов блока сравнения, вторая группа информационных входов которого соединена с группой информационных выходов радионавигатора и второй группой информационных входов шестого блока памяти, а выход блока сравнения соединен с входом управления шестого блока памяти, первая группа информационных выходов пятого вычислителя соединена с первой группой информационных входов восьмого блока памяти, вторая группа информационных входов которого является пятой входной установочной шиной устройства определения координат ИРИ и предназначена для задания максимально необходимого количества I используемых в обработке пеленгов  , вторая группа информационных выходов пятого вычислителя соединена с первой группой информационных входов седьмого вычислителя, вторая группа информационных входов которого является девятой входной установочной шиной устройства определения координат ИРИ и предназначена для задания размеров зоны поиска ИРИ второго уровня {B2, L2}, а группа информационных выходов соединена с первой группой информационных входов восьмого вычислителя, вторая группа информационных входов которого является десятой входной установочной шиной устройства определения координат ИРИ, предназначенной для задания количества контрольных точек М зоны поиска ИРИ второго уровня, а группа информационных выходов восьмого вычислителя соединена с группой информационных входов пятого блока памяти, группа информационных выходов которого соединена со второй группой информационных входов шестого вычислителя, первая группа информационных входов которого соединена с группой информационных выходов восьмого блока памяти, а третья группа информационных входов является шестой входной установочной шиной устройства определения координат ИРИ и предназначена для задания радиуса R' локальных зон поиска ИРИ второго уровня с центрами в контрольных точках m, m=1, 2, … М, блок расчета координат и блок принятия решения, первая группа информационных входов которого соединена с первой группой информационных выходов шестого вычислителя, вторая группа информационных входов является седьмой входной установочной шиной устройства определения координат ИРИ и предназначена для задания порога в виде количества η пеленгов
, вторая группа информационных выходов пятого вычислителя соединена с первой группой информационных входов седьмого вычислителя, вторая группа информационных входов которого является девятой входной установочной шиной устройства определения координат ИРИ и предназначена для задания размеров зоны поиска ИРИ второго уровня {B2, L2}, а группа информационных выходов соединена с первой группой информационных входов восьмого вычислителя, вторая группа информационных входов которого является десятой входной установочной шиной устройства определения координат ИРИ, предназначенной для задания количества контрольных точек М зоны поиска ИРИ второго уровня, а группа информационных выходов восьмого вычислителя соединена с группой информационных входов пятого блока памяти, группа информационных выходов которого соединена со второй группой информационных входов шестого вычислителя, первая группа информационных входов которого соединена с группой информационных выходов восьмого блока памяти, а третья группа информационных входов является шестой входной установочной шиной устройства определения координат ИРИ и предназначена для задания радиуса R' локальных зон поиска ИРИ второго уровня с центрами в контрольных точках m, m=1, 2, … М, блок расчета координат и блок принятия решения, первая группа информационных входов которого соединена с первой группой информационных выходов шестого вычислителя, вторая группа информационных входов является седьмой входной установочной шиной устройства определения координат ИРИ и предназначена для задания порога в виде количества η пеленгов  , необходимого для принятия решения о расчете координат (Bs, Ls) s-го ИРИ, первый выход блока принятия решения соединен с входами обнуления восьмого блока памяти, пятого, четвертого и третьего вычислителей, а второй выход блока принятия решения соединен со входами управления пятого вычислителя и блока расчета координат, группа информационных входов которого соединена с второй группой информационных выходов шестого вычислителя, а группа информационных выходов является выходной шиной устройства определения координат ИРИ, а входы синхронизации первого и второго блоков сравнения, шестого и седьмого блоков памяти, блока принятия решения объединены и соединены с выходом генератора синхроимпульсов.
, необходимого для принятия решения о расчете координат (Bs, Ls) s-го ИРИ, первый выход блока принятия решения соединен с входами обнуления восьмого блока памяти, пятого, четвертого и третьего вычислителей, а второй выход блока принятия решения соединен со входами управления пятого вычислителя и блока расчета координат, группа информационных входов которого соединена с второй группой информационных выходов шестого вычислителя, а группа информационных выходов является выходной шиной устройства определения координат ИРИ, а входы синхронизации первого и второго блоков сравнения, шестого и седьмого блоков памяти, блока принятия решения объединены и соединены с выходом генератора синхроимпульсов.
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2458360C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2551355C1 |
| УГЛОМЕРНО-КОРРЕЛЯЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2458358C1 |
| WO 2004011955 A2, 05.02.2004 | |||
| EP 1601989 A1, 07.12.2005 | |||
| Способ изготовления ферритовыхСЕРдЕчНиКОВ МАгНиТНыХ гОлОВОК | 1979 |
|
SU834748A1 |
| US 7579988 B2, 25.08.2009. | |||

