Изобретение относится к транспортной технике и может быть использовано во многих отраслях народного хозяйства, в частности в области отдыха и спорта в виде инвентаря для массового катания на горнолыжных и морских курортах, в качестве транспортного средства при передвижении по труднопроходимой местности в условиях бездорожья и в медицинской технике в виде транспортного средства для инвалидов при перемещении по ступенчатой поверхности.
Известно транспортное средство, содержащее опорную раму, сиденье, передние и задние колеса, два колеса гусеничной передачи, клиновидные ремни с поперечными траками, привод с электродвигателем от аккумуляторов, пульт управления и механизм наклона сиденья, дополнительно имеет ручной привод с цепной передачей, педалями и муфтой включения, гусеничные передачи снабжены дополнительными колесами, а привод выполнен в виде редуктора, на выходных валах которого установлены колеса гусеничных передач, снабженных фрикционными муфтами и рычажным механизмом отключения (см. патент на изобретение RU №1514370 по кл. A61G 5/02 за 1989 г.).
Недостатками этого вида устройств является невозможность регулирования сиденья пассажира в горизонтальной плоскости в зависимости от наклона поверхности перемежения и сложность конструкции из-за введения дополнительных механизмов управления устройства.
Также известно устройство, содержащее каркас из верхней и нижней частей, сиденье со спинкой, подножки и подлокотники, гусеничный привод со звездочками и обручи, верхняя и нижняя части каркаса соединены между собой шарнирно посредством двух пар стержней и фиксатором, ведущие звездочки гусеничных приводов установлены на осях обручей в нижней части каркаса и снабжены храповым механизмом с выключателями, нижняя часть каркаса снабжена ограничителями стержней, а гусеницы выполнены в виде втулочно-роликовых цепей (см. патент РФ №1517960 по кл. A61G 5/02 за 1989 г.).
Недостатком данного устройства является то, что хотя оно и содержит регулировку положения сиденья при движении по наклонной поверхности, но эта регулировка не производится автоматически, а требуется ее осуществление самим водителем непосредственно перед началом движения. Кроме того, выполнение ходовых опор в виде сплошной гусеницы приводит к увеличению ее габаритов, и нет возможности ее отклонения при движении по ступенькам, а отсутствие колебаний ходовых элементов в вертикальной плоскости не позволяет свободно перемещаться по плоскости с преградами.
Техническая задача предлагаемого изобретения - создание универсального транспортного средства для передвижения людей и грузов по различным поверхностям, как по плоским с возможными преградами в виде ям и выступов, так и по наклонным поверхностям в виде ступенек.
Указанная техническая задача достигается тем, что в универсальном транспортном средстве, содержащем корпус, выполненный из верхней и нижней платформ, нижняя из которых закреплена на ходовых опорах, а на верхней платформе установлено сиденье, механизм наклона сиденья относительно верхней платформы и механизм управления движением устройства с приводом, нижняя платформа выполнена из двух частей по длине, шарнирно соединенных между собой в центре, верхняя платформа выполнена тоже из двух частей по длине, а в месте соединения всех частей верхней и нижней платформ установлена шаровая опора, каждая из ходовых опор нижней платформы выполнена из нескольких круглых катков, установленных друг за другом, причем часть из них имеет возможность смещения в вертикальной плоскости, а механизм управления перемещением и включением привода выполнен в виде пульта, соединенного с механическим преобразователем команд.
Еще одним отличием предлагаемого транспортного средства является то, что каждая из частей верхней и нижней платформы соединены между собой двуплечими шарнирами, катки несущих опор снабжены датчиками и механизмом возвратно-поступательного перемещения в вертикальной плоскости, периферийные катки в ходовых опорах поворачиваются относительно центральных катков в вертикальной плоскости, а каждая из частей нижней платформы снабжена участками, шарнирно соединенными с частями нижней платформы.
На фиг.1 изображен общий вид предлагаемого устройства.
На фиг.2 - вид А фиг.1.
На фиг.3 - схема перемещения вверх по ступенькам.
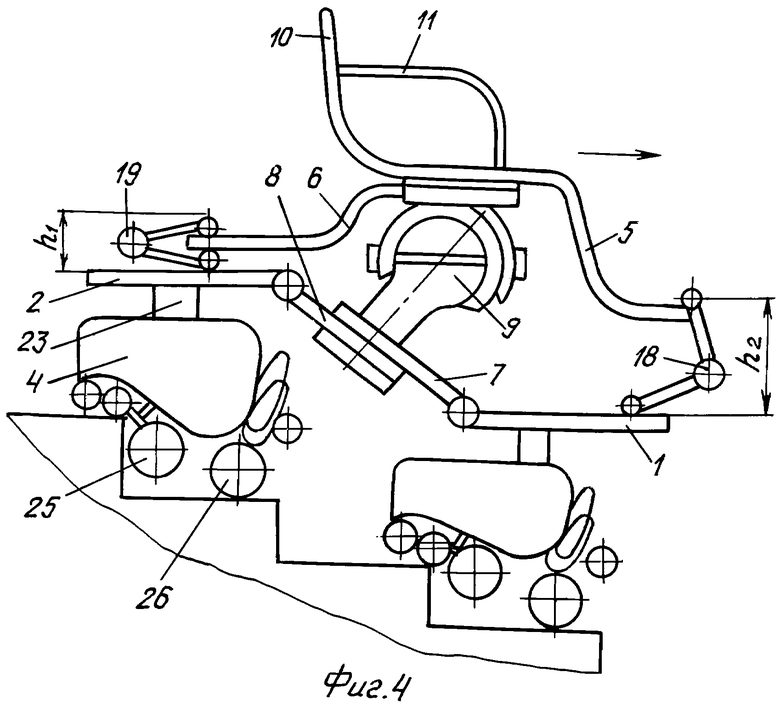
На фиг.4 - схема перемещения вниз по ступенькам.
На фиг.5 - схема расположения несущей опоры при повороте.
Как показано на графической части, предлагаемое устройство содержит нижнюю платформу состоящую из двух частей 1 и 2, которые установлены на ходовых опорах 3 и 4. На нижней опоре установлена верхняя опора, которая также выполнена их двух частей 5 и 6. Между частями 1, 2 имеются поворотные участки 7, 8, в месте соединения которых установлена шаровая опора 9. На одной части 5 верхней опоры закреплено сиденье 10 с подлокотниками 11 и участком 12 для фиксации ног. Перед сиденьем 10 установлен на штоке 13 пульт 14, который соединен с преобразователем команд 15. Между верхней и нижней опорами установлены привода 16 и 17 для опор 3 и 4. Нижняя опора и верхняя опора соединены между собой двуплечими гидроцилиндрами 18 и 19. Участки 7, 8 в боковой части соединены между собой гидроцилиндрами 20, 21. Сиденье 10 расположено на части 5 верхней опоры над шаровой опорой 9, которая соединена с частью 6 верхней опоры, на которой за сиденьем 10 установлен источник питания 22. Ходовая опора 4 с помощью стойки 23 соединена с частью 2, ходовая опора 3 соединена стойкой 24 с частью 1 нижней опоры. С нижней стороны на ходовых опорах 3 и 4 закреплены центральные катки 25 и периферийные катки 26 с датчиком их поворота в вертикальной плоскости по отношению к каткам 25. Катки 25 и катки 26 могут быть соединены гусеничными лентами (не показано).
Работа предлагаемого средства осуществляется следующим образом. Водитель усаживается в кресло 10 таким образом, чтобы его локти были на подлокотниках 11, а ноги ступнями упирались в участок 12. После этого одной рукой через пульт 14 включаются приводы 16 и 17. После включения приводов также с помощью пульта 14 с помощью преобразователя команд приводятся во вращение катки 25, и устройство начинает перемещаться.
При движении по горизонтальной плоскости ходовые опоры 3 и 4 катятся только на центральных катках 25, а периферийные катки 26 не опираются на плоскость перемещения. В этом случае двуплечие гидроцилиндры 20 и 21 между верхней и нижней опорами находятся в одинаковом среднем положении, и выполняется условие (h=h). Водитель находится в вертикальном положении, при этом участки 7 и 8 частей 1 и 2 нижней опоры находятся в на одной линии, а опора 9 расположена вертикально к плоскости перемещения. Для поворота средства в горизонтальной плоскости от пульта 14 дается команда на гидроцилиндры 18 и 19, которые, сжимаясь или раздвигаясь, поворачивают часть 1 нижней опоры в нужную сторону и при движении заставляют перемещаться за собой часть 2 нижней опоры. После завершения поворота цилиндры 18 и 19 возвращаются в исходное положение, и движение средства осуществляется как по прямой линии.
Передвижение средства вверх по ступенчатой поверхности осуществляется следующим образом. Как только периферийные катки 26 ходовых опор 3 и 4 коснутся ступеньки, они поднимаются вверх и располагаются над ней, а катки 25 продолжают перемещаться вперед по нижней ступеньке. Как только первый из катков 25 коснется торца ступеньки перед ним, включается привод, который заставляет катки 26 опускаться вниз. При этом опоры 3 или 4 вместе с катками 25 поднимутся вверх, двуплечий гидроцилиндр 18 сожмется, а гидроцилиндр 19 разожмется. Участки 7 и 8 вместе с опорой 9 наклонятся назад, и движение продолжится. Все повторится до тех пор, пока средство не поднимется до конца ступенек.
При движении вниз по ступенькам все происходит аналогичным образом, как и при подъеме, только периферийные катки 26 не вступают в контакт с нижней ступенькой, а перемещение средства производится на катках 25. Периферийные катки 26 в этом случае выполняют роль фиксатора для компенсации провала вниз большего, чем высота ступеньки.
При наезде на препятствие только одной из ходовых опор 3 или 4 происходит отклонение только периферийных катков 26 только одной опоры, а остальные остаются в положении перемещения по прямой линии. Выполнение нижней и верхней опор из двух частей и шарнирных участков в центре нижней опоры позволяет удерживать кресло водителя постоянно в вертикальном положении независимо от перемещения по различным поверхностям. Снабжение ходовых опор поворотными катками позволяет осуществлять перемещение всего устройства по ступенчатым поверхностям без дополнительных устройств и без остановок с плавным перемещением.
Предлагаемая конструкция транспортного средства позволяет получить транспортное средство для перемещения как по горизонтальным, так и по наклонным поверхностям, например по лестничным маршам, без дополнительных переделок и обеспечивает постоянное расположение кресла водителя в горизонтальном положении. При поворотах, при движении под уклон обеспечивается устойчивость за счет выравнивания конструкции относительно точек опоры.
Использование предлагаемого устройства в транспортных устройствах для одного или нескольких человек позволяет получить надежную и управляемую на спусках и подъемах конструкцию, которая меняет направление движения непосредственно самим человеком, а за счет изменения высоты расположения катков ходовых опор от поверхности перемещения позволяет сохранять горизонтальное расположение сиденья независимо от радиуса поворота и угла наклона поверхности, что делает его универсальным при перемещении по различным поверхностям.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОМЕСТНОЕ УСТРОЙСТВО ДЛЯ СКОЛЬЖЕНИЯ ПО ВОЛНАМ | 2008 |
|
RU2388638C2 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО | 2008 |
|
RU2399539C2 |
| УСТРОЙСТВО ДЛЯ СПУСКА С ГОР И СКОЛЬЖЕНИЯ ПО ВОЛНАМ | 2007 |
|
RU2357887C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2007 |
|
RU2404400C2 |
| РАЗВЕДЫВАТЕЛЬНАЯ ХИМИЧЕСКАЯ МАШИНА | 2007 |
|
RU2369826C2 |
| ГУСЕНИЧНЫЙ ТРАНСПОРТЕР И СПОСОБ ПОГРУЗКИ НА НЕГО ПАРОМА | 2006 |
|
RU2332322C1 |
| БРОНЕТРАНСПОРТЕР | 2007 |
|
RU2369825C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДОВ | 2012 |
|
RU2506068C1 |
| БОЕВАЯ МАШИНА ДЕСАНТА | 2001 |
|
RU2223460C2 |
| ГУСЕНИЧНЫЙ ТРАНСПОРТЕР | 2001 |
|
RU2207281C2 |



Изобретение относится к транспортной технике. Универсальное транспортное средство содержит корпус, выполненный из верхней и нижней платформ, механизм наклона сиденья относительно верхней платформы и механизм управления движением устройства с приводом. Нижняя платформа закреплена на ходовых опорах, а на верхней платформе установлено сиденье. Нижняя платформа выполнена из двух частей по длине, шарнирно соединенных между собой в центре. Верхняя платформа выполнена также из двух частей по длине. В месте соединения всех частей верхней и нижней платформ установлена шаровая опора. Каждая из ходовых опор нижней платформы выполнена из нескольких центральных катков, установленных друг за другом, и нескольких периферийных катков, смещающихся в вертикальной плоскости. Механизм управления перемещением и включением привода выполнен в виде пульта, соединенного с механическим преобразователем команд. Достигается создание универсального транспортного средства для передвижения людей и грузов по различным поверхностям как по плоским с возможными преградами в виде ям и выступов, так и по наклонным поверхностям в виде ступенек. 4 з.п. ф-лы, 5 ил.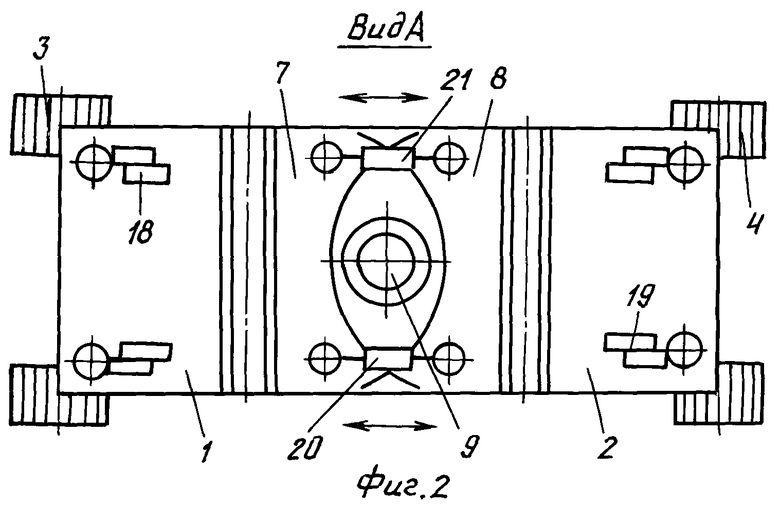
1. Универсальное транспортное средство, содержащее корпус, выполненный из верхней и нижней платформ, нижняя из которых закреплена на ходовых опорах, а на верхней платформе установлено сиденье, механизм наклона сиденья относительно верхней платформы и механизм управления движением устройства с приводом, отличающееся тем, что нижняя платформа выполнена из двух частей по длине, шарнирно соединенных между собой в центре, и верхняя платформа выполнена тоже из двух частей по длине, а в месте соединения всех частей верхней и нижней платформ установлена шаровая опора, каждая из ходовых опор нижней платформы выполнена из нескольких центральных катков, установленных друг за другом, и несколько периферийных катков, смещающихся в вертикальной плоскости, а механизм управления перемещением и включением привода выполнен в виде пульта, соединенного с механическим преобразователем команд.
2. Универсальное транспортное средство по п.1, отличающееся тем, что каждая из частей верхней и нижней платформы соединены между собой двуплечими шарнирами.
3. Универсальное транспортное средство по п.1, отличающееся тем, что периферийные катки несущих опор снабжены датчиками и механизмом возвратно-поступательного перемещения в вертикальной плоскости.
4. Универсальное транспортное средство по п.1, отличающееся тем, что периферийные катки в ходовых опорах поворачиваются относительно центральных катков в вертикальной плоскости.
5. Универсальное транспортное средство по п.1, отличающееся тем, что каждая из частей нижней платформы снабжена участками, шарнирно соединенными с частями нижней платформы.
| Коляска для инвалидов | 1988 |
|
SU1517960A1 |
| JP 2009234534 A, 15.10.2009 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМИ ДВИЖИТЕЛЯМИ М.И.ЛОВЧИКОВА | 1992 |
|
RU2031040C1 |
| Движитель транспортного средства Анопченко В.Г. | 1983 |
|
SU1117246A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ПРЕОДОЛЕНИЯ ИМ ЛЕСТНИЧНЫХ МАРШЕЙ (ВАРИАНТЫ) | 2000 |
|
RU2200526C2 |

