Изобретение относится к транспортному ма(11иностроению, а именно к движителям транспортных средств.
Известен движитель транспортного средства, содержащий корпус с опорно-направляюшей поЕ5ер,хность о и обкатывающиеся по корпусу катки, установленные с возможFiocTbo свободного BpauieHHH на концах звеньев, связанных с приводом перемещения катков вокруг корпуса |lj.
Одр1ако в известном устройстве ннзка надежность движителя вследствие большого количества катков, соединенных цепью звеньев, разрыв одного из которых приводит к выходу из строя всего движителя.
Цель изобретения - повыи ение надежности движителя.
Цель достигается тем, что в движителе транспортного средства, содержаше.м корПус с опорно-нагфавляюшей поверхностью и обкатывающиеся по корпусу катки, установленные с возможностью свободного вращения на концах звеньев, связанных с приводом пере.мещения катков вокруг корпуса, последний выполнен в виде правильного многогранника с четным числом сторон, каждая вторая грань которого скруглена выпукт лой дугообразной поверхностью, привод перемещения катков выполнен в виде многоЛучевого звездообразного водила, ось вращения которого размеп 1ена в центре корпуса, а лучи связаны со звеньями 1гарнирно в Их середине.
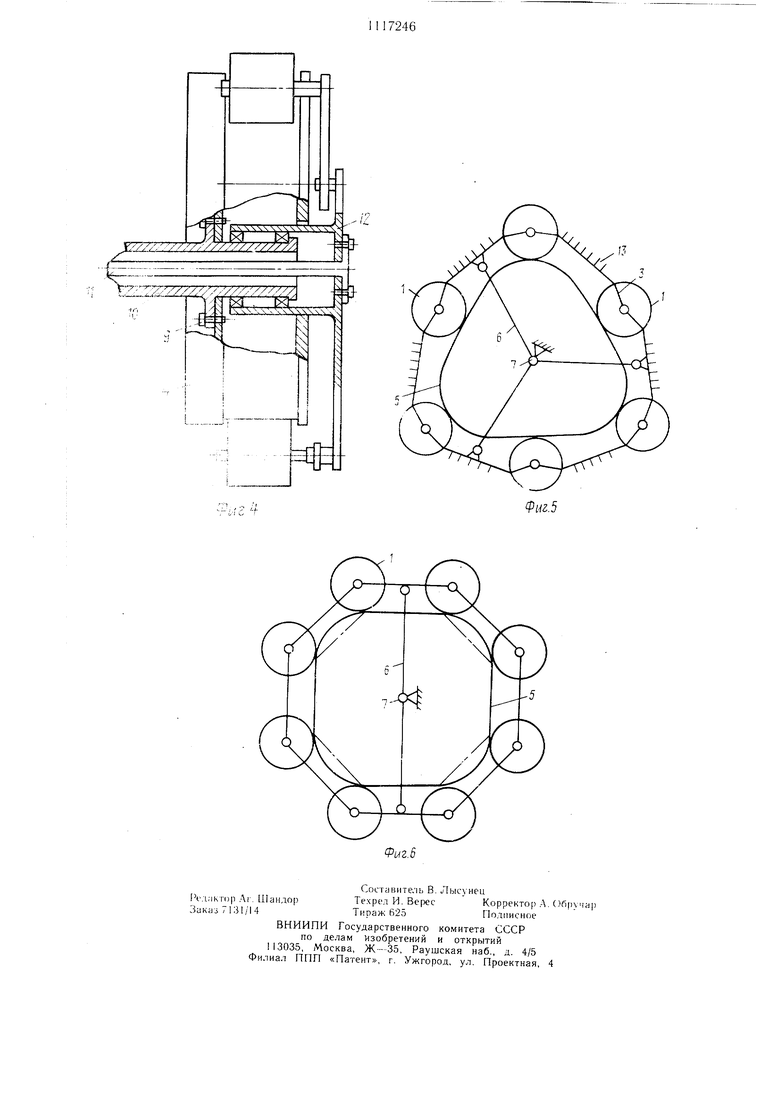
На фиг. 1 показан нредлагае -1ын движитель, общий вид; на фиг. 2 - схема движителя; на фиг. 3 - схема работы движителя; на фиг. 4 - поперечный осевой разрез движителя; на фиг. 5 и 6 - варианты выполнения движителя.
Движитель транспортного средства (фиг. ) содержит катки 1, свободно установленные на осях 2 звеньев 3, корпус 4 с опорно-папранляющей поверхностью 5 и трехлучевое водило 6 с осью 7, соединенное посредством шарниров 8 со звеньями 3. ПрО( опорно-направляющей пов рхности 5 выполнен (фиг. 2) в ви-де преобразованного npanHvTbHoro Н1естигранника с ребрами а, б, ft, г, д, е. причем стороны бе, гд, еа выполнены дугообразными поверхностями с учетом обеспечения безотрывного качения катков по опорно-направляющей поверхности 5.
Ось 7 води;1а 6 размещена в геометрическом центре повсрхности 5 корпуса 4. Длипа каждого звена 3 установлена из условия обеспечения равенства расстояния между катками в зоне контакта с опорно-направляющей поверхностью 5, я шарниры 8 крепления водила б размещены R средней части
зпеньем 3. Корпус 4 болтами 9 прикреплен к остову 1()транспортного средства, а пе)луось II соединена со ступицей 12 водила 6. Звенья могут быть оснан1ены грунтозане5 нами 13.
Движитель работает следующим обратом.
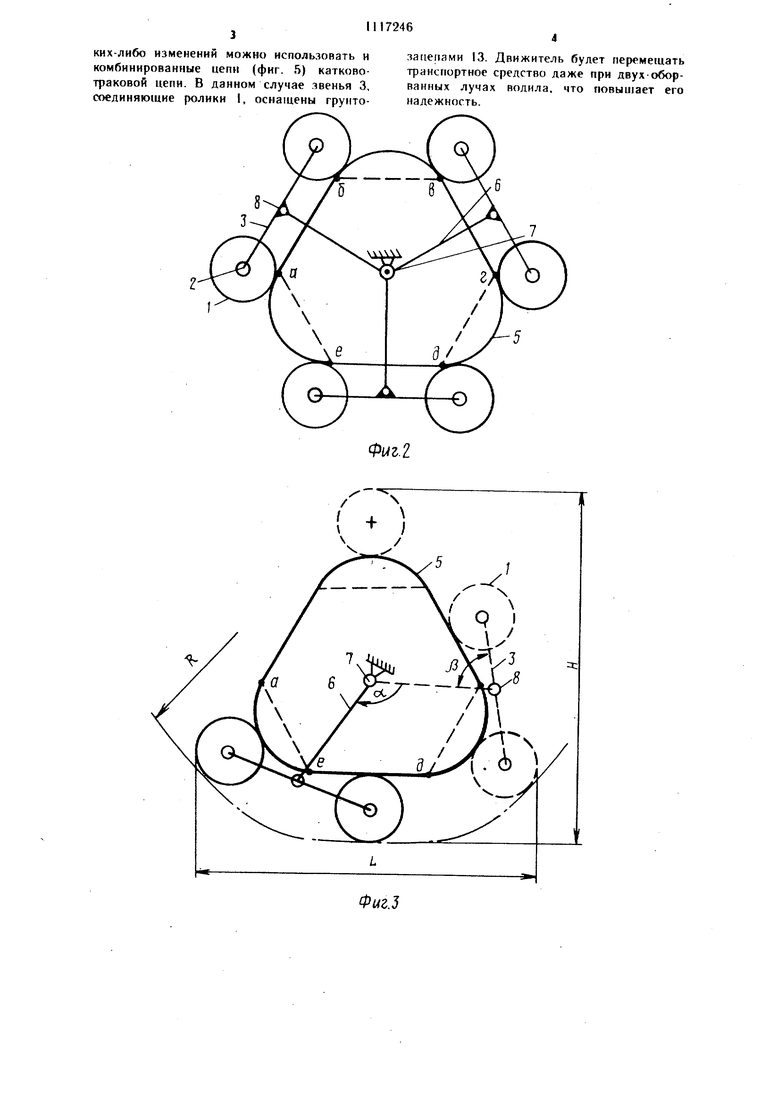
При подведении крутян|его момента к оси 7 водила 6 (фиг. 3) HJapHHp 8 каждого О звена 3 движется по окружности постоянного радиуса, : аданного длиной водила 6, при этом катки I, размеп1енные на концах звеньев 3, всегда катятся только но смежным сторонам опорно-направляющей по5 BepxFiocTH 5. В частности, если один каток находится на дугообраз1гом участке, например, на дуге еа, то второй - на прямолинейном участке ед, что обеспечивает (с учетом установки luapHHpa 8 в середине звена
„ 3) безотрывное качение катков 1 но замкнутой поверхности 5, содержащей (грямолинейные участки.
На фиг. 3 показаны изменяемые параметры движителя при повороте одного звена 3 с катками i водилом б на угол «., в процессе которого благодаря изменению угла f между водилом 6 и звеном 3 обеспечивается постоянный контакт катков I с поверхностью 5. При этом средний радиус R па участке Ц равном высоте движителя И,
0 г1римерио равен также высоте Н, т. е. в зояе.взаимодействия движителя с опорной поверхностью катки описывают траекторию, совпадающую с профилем колесного движителя, имеющего вдвое больн1ИЙ диаметр по
, сравнению с высотой Н. При движении по жесткому грунту корпус движителя. свя: анный с кузовом транспортного средства, ка.титея по каткам со скоростью, удвоенной относительно линейной скорости осей катков, задаваемой водилом.
При движении по легко деформируемому грунту часть силы тяжести транспортного средства воспринимает корпус двнжигеля. а катки работают в режиме траков гусеничной цепи (т. е. не вращаются), обесг ечивая скорость движения, рап.чую ско)()С1И перемещения звеньев движите.пя.
Привод осуществляется 1К)ди,ч(м, HMCKJщим постоянное (шарнирное) сиедннснис
со звеньями и кине.матика движите.1я уири; щает его компоновку.
Важным свойством движит(.)я яп.чяпся возможность варьирования (iiiofiно-направляющей поверхности, копирую
можно выполнять в виде нреобра.ншиннкю квадрата (с противоположными криполи нейными сторонами), правительного впп.мн угольника (фиг. 6) и т. п. фшу}) (км на
ких-либо изменений можно использовать и комбииированные цепи (фиг. 5) катковотраковой цепи. В даниом случае звенья 3, соедиияющие ролики I, осиашеиы грумтоза 1ег1ами 13. Движитель будет перемещать транспортиое средство даже при двух-оборBanFibix лучах водила, что повышает его надежность.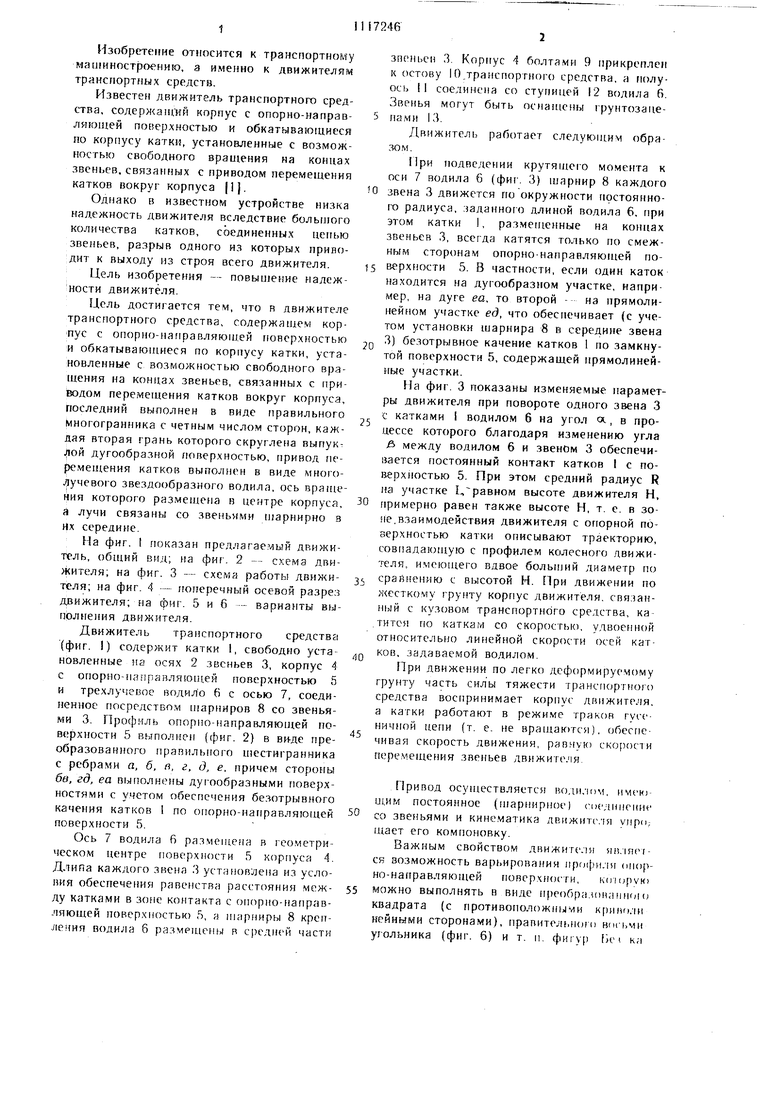
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумно-гусеничный движитель | 1979 |
|
SU852698A1 |
| СПОСОБ ПОЛУЧЕНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ, СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ В ОДНОНАПРАВЛЕННОЕ ПРЕРЫВИСТОЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ, СПОСОБ УПРАВЛЯЕМОГО ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ЗАДАННОМ НАПРАВЛЕНИИ И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2004 |
|
RU2280513C2 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| Гусеничный движитель амфибийного транспортного средства | 1980 |
|
SU882810A1 |
| Движитель гусеничного транспортного средства | 1987 |
|
SU1423449A1 |
| ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 1973 |
|
SU404682A1 |
| Гусеничный движитель | 1978 |
|
SU713750A1 |
| СПОСОБ ОБКАТКИ ГУСЕНИЧНЫХ ЛЕНТ НА СТЕНДЕ (ВАРИАНТЫ) | 2010 |
|
RU2423681C1 |
| Силовая передача | 1986 |
|
SU1391976A1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2019461C1 |
Движитель транспортного средства, содержащий корпус с опорно-направляющей поверхностью п обкатывгиоп.песя но ко) катки, установ.1епные г всктожноспж) ciiDбодного вращения на концах звеньев, связанных с нриводом перемещения каткой вокруг корпуса, отличающийся тем, чк), с целью новьинемия надежности, корпус выполнен в виде правильного многогранника с четным числом сторон, каждая вторая 1рань которого скруг,1ена выпуклой ду1ЧК)бразноГ| поверхностью, привод переламцения катков вьп1о,1нен в виде мпого.гучевого звездообралnoio водила, ось вращения которого размещепа в пентре корпуса, а .ими связаны созвепьями пшрпирно в их середине. (Л ю « о:
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU83956A1 | |
| Способ крашения тканей | 1922 |
|
SU62A1 |
