Изобретение относится к механизмам, применяемым в технике для получения заданного движения ведомого звена.
Известен плоский четырехзвенный механизм [1, стр.89, рис.157], включающий в свой состав кривошип и шатун, обеспечивающие заданное качательное движение выходного звена - коромысла. Недостатком такого механизма является невозможность задания движения непосредственно шатуну механизма.
Наиболее близким к предлагаемому является пространственный четырехзвенный механизм второго семейства с винтовой парой и роликом, движущимся в прорези [1, стр.111, рис.205]. При этом ролик образует высшую кинематическую пару с неподвижным звеном - стойкой. Об отнесении этого механизма к механизмам второго семейства указывается академиком Артоболевским И.И. в [1, стр.111, строка 29 снизу]. Ведущим звеном в этом механизме является соединенный во вращательную пару со стойкой кривошип, а выходное звено, образующее высшую пару со стойкой, входит с шатуном в винтовую кинематическую пару. Именно этот механизм принимается за прототип заявляемого.
Недостатком прототипа является то обстоятельство, что кривошип и шатун в нем связаны во вращательную пару, геометрическая ось которой совпадает с плоскостью воспроизведения движения, что препятствует передаче движения от кривошипа к шатуну.
Задачей изобретения является техническое преобразование механизма прототипа, позволяющее обеспечить беспрепятственное относительное движение звеньев в нем.
Сущность заявляемого технического решения заключается в том, что предлагается пространственный кривошипно-шатунный механизм второго семейства, включающий кривошип, шатун, который входит в винтовую кинематическую пару с выходным звеном, выходное звено с роликом, входящим в паз, выполненный на неподвижном звене - стойке, а шатун входит в винтовую кинематическую пару с выходным звеном, при этом привод, состоящий из двигателя и зубчатой передачи, выполнен подвижным, жестко связанным с втулкой кривошипа, а движение от двигателя к шатуну передается через зубчатую передачу.
На чертеже изображен пространственный кривошипно-шатунный механизм второго семейства.
Механизм состоит из кривошипа 1, шатуна 2, гайки 3 (выходное звено) с роликом 4, движущимся в прорези 5, выполненной на неподвижном звене - стойке 6. Кривошип 1 входит со стойкой 6 во вращательную кинематическую пару пятого класса p5, шатун 2 входит с кривошипом 1 также во вращательную кинематическую пару пятого класса p5, причем эта пара образуется участком вала а шатуна 2 и втулкой b кривошипа 1. Гайка 3 образует с шатуном 2 винтовую кинематическую пару p5, гайка 3, в свою очередь, образует со стойкой 6 высшую кинематическую пару четвертого класса p4.
На шатуне 2 жестко крепится зубчатое колесо 7, которое приводится в движение от колеса 8, получающего движение от двигателя 9. Двигатель 9 устанавливается жестко на втулке b кривошипа 1. Таким образом, двигатель 9, зубчатая передача 8-7, образующие привод механизма, оказываются подвижными.
Работает механизм следующим образом. От подвижного двигателя 9 через зубчатую передачу 8-7 движение задается шатуну 2, который, вкручиваясь в гайку 3, приводит ее в движение. Одновременно с движением шатуна 2 получает движение кривошип 1 относительно стойки 6, и весь привод (двигатель 9 и зубчатая передача 8-7) становится подвижным. При этом выходное звено 3 получает требуемое движение.
Использованные источники
1. Артоболевский И.И. Теория механизмов. Изд-во «Наука», 1965.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ ВИНТО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2595101C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2557322C1 |
| МЕХАНИЗМ ДЛЯ ВЫЧЕРЧИВАНИЯ ПРОСТРАНСТВЕННЫХ КРИВЫХ | 2017 |
|
RU2668414C1 |
| ЧЕТЫРЕХЗВЕННЫЙ РЕДУКТОР ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2005 |
|
RU2295080C1 |
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 2010 |
|
RU2446331C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ | 2012 |
|
RU2513776C1 |
| Шарнирно-рычажный механизм с регулируемой длиной звеньев | 2017 |
|
RU2655568C1 |
| Шарнирно-рычажный механизм с регулируемой длиной звеньев | 2017 |
|
RU2655120C1 |
| УРАВНОВЕШЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2583329C2 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
Изобретение относится к области машиностроения, в частности к кривошипно-шатунным механизмам. Кривошипно-шатунный механизм включает подвижный привод, кривошип, шатун, выходное звено с роликом, входящим в паз, выполненный на неподвижном звене - стойке. Шатун входит в винтовую кинематическую пару с выходным звеном. Привод состоит из двигателя и зубчатой передачи и жестко связан со втулкой кривошипа. Движение от двигателя к шатуну передается через зубчатую передачу. Решение направлено на расширение функциональных возможностей механизма за счет обеспечения возможности беспрепятственного относительного движения звеньев в механизме. 1 ил.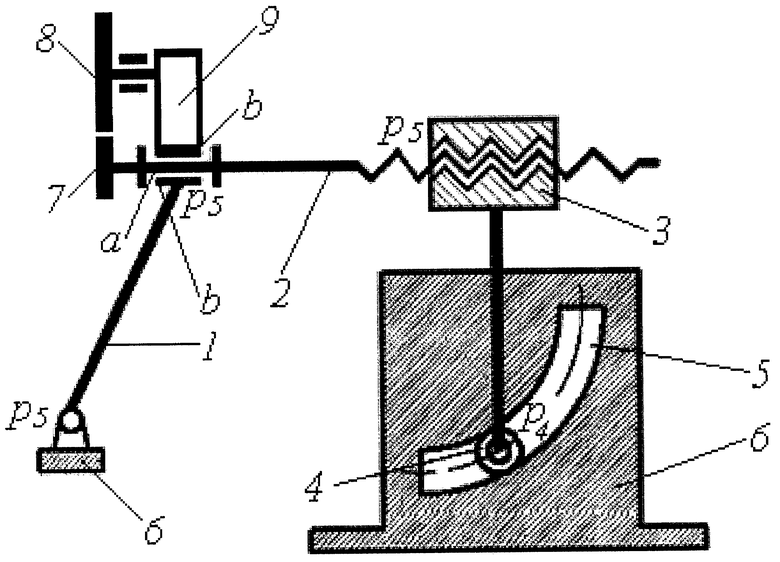
Пространственный кривошипно-шатунный механизм второго семейства, включающий кривошип, шатун, который входит в винтовую кинематическую пару с выходным звеном, выходное звено с роликом, входящим в паз, выполненный на неподвижном звене - стойке, при этом шатун входит в винтовую кинематическую пару с выходным звеном, отличающийся тем, что привод, состоящий из двигателя и зубчатой передачи, выполнен подвижным, жестко связанным с втулкой кривошипа, а движение от двигателя к шатуну передается через зубчатую передачу.
| Артоболевский И.И | |||
| Теория механизмов | |||
| Изд-во «Наука», 1965, с.111, рис.205 | |||
| DE 3118805 A1, 09.12.1982 | |||
| DE 3308537 C1, 11.10.1984 | |||
| РЫЧАЖНЫЙ МЕХАНИЗМ С ПОДВИЖНЫМ ПРИВОДОМ | 2002 |
|
RU2229641C2 |

