Настоящее изобретение относится к машиностроению, а именно к кривошипно-ползунным механизмам.
Известен кривошипно-ползунный механизм, который включает в себя подвижные звенья - кривошип, шатун и ползун [1, стр. 124, рисунок 5.5]. Звенья такого механизма соединены между собой и с неподвижным звеном - стойкой в одноподвижные кинематические пары - плоские шарниры. Недостатком такого механизма является то обстоятельство, что в нем присутствуют избыточные связи, которые приводят к изнашиванию шарниров, т.к. при сборке механизма возникает необходимость деформирования звеньев между геометрическими их осями, являющимися не строго параллельными. Для установления числа избыточных связей используется известная формула Н.И. Колчина [2, стр. 88]
q=m(∑р-n),
где q - число избыточных связей, m - число общих связей, наложенных на весь механизм, ∑p - общее число кинематических пар, n - число подвижных звеньев. В кривошипно-ползунном механизме, показанном в [1], m=3 (плоский механизм), ∑p=4, n=3, откуда следует, что число избыточных связей в нем по приведенной формуле q=3.
Наиболее близким к заявляемому механизму по технической сущности является самоустанавливающийся кривошипно-ползунный механизм Л.Н. Решетова [3, стр. 71], в котором решается проблема избыточности за счет замены кинематических пар пятого класса (p5) на кинематические пары более высоких классов, а именно двухподвижные p4, трехподвижные p3.
Однако реализовать такое предложение для плоского механизма оказывается практически невозможным, т.к. механизм при этом становится пространственным, а входное и выходное звенья оказываются движущимися в разных плоскостях.
Задачей настоящего изобретения является полное исключение избыточных связей в плоском кривошипно-ползунном механизме с обеспечением движения входного (кривошипа) и выходного (ползуна) звеньев в одной плоскости [4, стр. 12].
Сущность изобретения заключается в том, что предлагается уравновешенный кривошипно-ползунный механизм, включающий в свой состав кривошип, шатун и ползун, при этом шатун соединяется с ползуном через дополнительное звено, образующее сферическую кинематическую пару с шатуном и вращательную кинематическую пару с ползуном так, что геометрическая ось плоского шарнира, соединяющего дополнительное звено с ползуном, проходит через центр сферического шарнира, соединяющего шатун с дополнительным звеном.
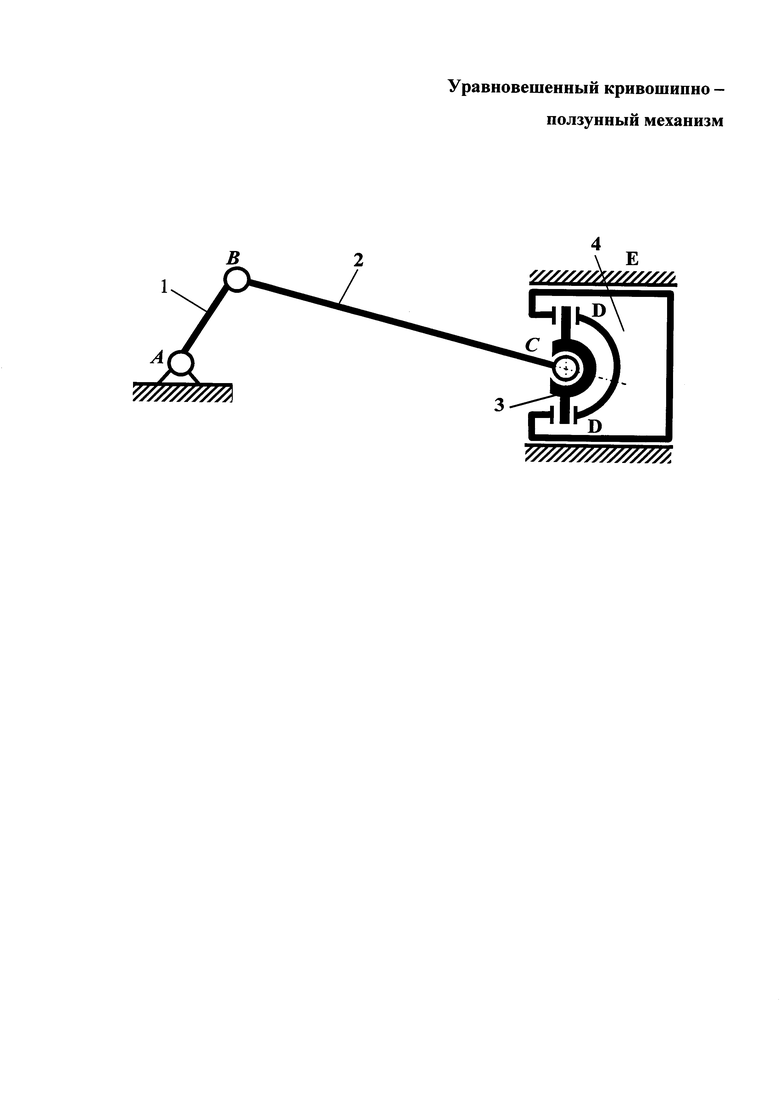
На чертеже показан уравновешенный кривошипно-ползунный механизм. Он состоит из кривошипа 1, шатуна 2, дополнительного звена 3 и ползуна 4. Шатун 2 соединяется с ползуном 4 через дополнительное звено, образующее сферическую пару с шатуном 2 (сферический шарнир) и вращательную кинематическую пару с ползуном 4, геометрическая ось шатуна 2 (плоского шарнира) проходит через центр сферического шарнира.
Работает механизм следующим образом. При задании кривошипу вращательного движения относительно стойки А он через шатун, с которым соединен в точке В, и вспомогательное звено 3 передает движение ползуну 4. А так как геометрическая ось шатуна 2 проходит через центр сферического шарнира - кинематическая пара p3 (точка С) дополнительного звена 3, соединяющегося через вращательную кинематическую пару с ползуном 4 (точка D), то благодаря этому механизм становится уравновешенным, т.е. не имеющим избыточных связей. Это доказывается тем, что его подвижность по универсальной формуле Малышева А.П. при числе звеньев n=4, числах кинематических пар пятого p5=4 и третьего p3=1 классов
W=6n-5p5-4p4-3p3-2p2-p1=6·4-5·4-3·1=1,
т.е. механизм оказывается вполне работоспособным.
Источники информации
1. Артоболевский И.И. Теория механизмов и машин. Учебник для ВТУЗов, 3-е изд., перераб. М., 1975. 638 с.
2. Колчин Н.И. Анализ и синтез механизмов. Сборник статей. / Н.И. Колчин // Труды второго всесоюзного совещания по основным проблемам теории машин и механизмов. М., 1960. С. 85-99.
3. Решетов Л.Н. Самоустанавливающися механизмы: Справочник. 2-е изд., перераб. и доп. - М.: Машиностроение. 1985. 272 с.
4. Дворников Л.Т. К проблеме синтеза многоподвижных соединений звеньев механических систем. / Л.Т. Дворников // Материалы одиннадцатой научно-практической конференции по проблемам механики и машиностроения. Новокузнецк. СибГИУ. - 2001. - С. 9-21.
| название | год | авторы | номер документа |
|---|---|---|---|
| Уравновешенный кривошипно-ползунный механизм | 2017 |
|
RU2666994C1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ ПРЕССА | 2006 |
|
RU2326765C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2557322C1 |
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 2010 |
|
RU2446331C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ ПРЕССА | 2008 |
|
RU2378118C1 |
| КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ | 2001 |
|
RU2210692C1 |
| Двухтактный поршневой двигатель внутреннего сгорания и способ его работы | 2019 |
|
RU2729562C1 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН | 2019 |
|
RU2699695C1 |
| ПРОСТРАНСТВЕННЫЙ СМЕСИТЕЛЬНЫЙ МЕХАНИЗМ | 2012 |
|
RU2484886C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ ВИНТО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2595101C1 |
Изобретение относится к машиностроению, а именно к кривошипно-ползунным механизмам. Уравновешенный кривошипно-ползунный механизм содержит четыре кинематически подвижных звена, в том числе кривошип, шатун и ползун. Шатун соединен с ползуном через четвёртое звено, образующее сферическую пару с шатуном и вращательную кинематическую пару с ползуном, а геометрическая ось шатуна проходит через центр сферического шарнира. При этом обеспечивается движение входного и выходного звеньев в одной плоскости. Достигается создание уравновешенного кривошипно-ползунного механизма. 1 ил.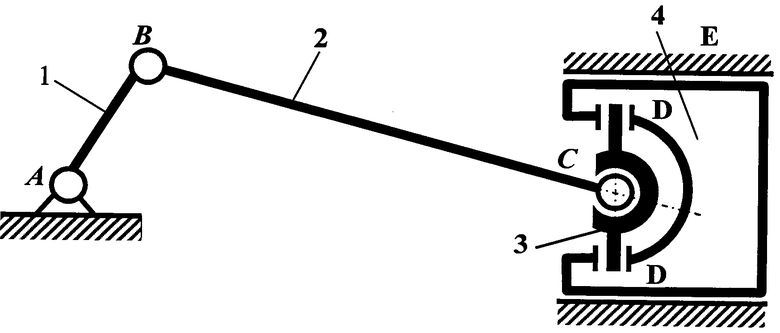
Уравновешенный кривошипно-ползунный механизм, включающий в свой состав кривошип, шатун и ползун, отличающийся тем, что шатун соединен с ползуном через дополнительное звено, образующее сферическую пару с шатуном и вращательную кинематическую пару с ползуном, при этом геометрическая ось шатуна проходит через центр сферического шарнира.
| Самоустанавливающиеся механизмы, Решетов Л.Н., Справочник, М., Машиностроение, 1991, стр.61, 62, рис | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2008 |
|
RU2362930C1 |
| Механизм возвратно-поступательного движения с регулируемым ходом | 1987 |
|
SU1555571A1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1996 |
|
RU2110718C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ | 1997 |
|
RU2115850C1 |
| CN 103792189 A, 14.05.2014. | |||

