Изобретение относится к механизмам, применяемым в технике для получения заданного движения ведомого звена.
Известен плоский четырехзвенный механизм [1, стр.88, рис.156], включающий кривошип, шатун, коромысло и стойку. Недостатком такого механизма является невозможность воспроизведения пространственного движения, так как механизм выполнен плоским.
Наиболее близким к предлагаемому является пространственный шарнирный четырехзвенник [2, стр.148, рис.8.5]. В этом механизме ведущее звено - кривошип - входит со стойкой во вращательную пару пятого класса, шатун входит с кривошипом в сферическую пару третьего класса и с коромыслом также в сферическую пару, коромысло образует со стойкой вращательную пару пятого класса. Всего подвижных звеньев в механизме 3 (n=3), соединенных в четыре кинематические пары: 2 пары пятого класса (р5=2), 2 пары третьего класса (р3=2). Введя значения для n, p5 и р3 в формулу [1, стр.81, формула 3.4], определим, что подвижность этого механизма будет равна
W=6n-5p5-4p4-3p3-2p2-p1=6·3-5·2-4·0-3·2-2·0-0=18-10-8=2.
Недостатком механизма прототипа является то, что он обладает лишней подвижностью, так как шатун может независимо вращаться вследствие соединения с кривошипом и коромыслом сферическими парами.
Задачей изобретения является создание пространственного четырехзвенного механизма, имеющего одну степень свободы (W=1).
Сущность заявляемого устройства заключается в том, что предлагается пространственный четырехзвенный механизм, включающий ведущее звено, шатун, коромысло и стойку, при этом на стойке жестко установлен гидроцилиндр возвратно-поступательного действия, входящий с ведущим звеном в поступательную пару, а кинематические пары, соединяющие шатун с ведущим звеном и коромыслом, выполнены вращательными, при этом пара, соединяющая коромысло со стойкой, выполнена двухподвижной.
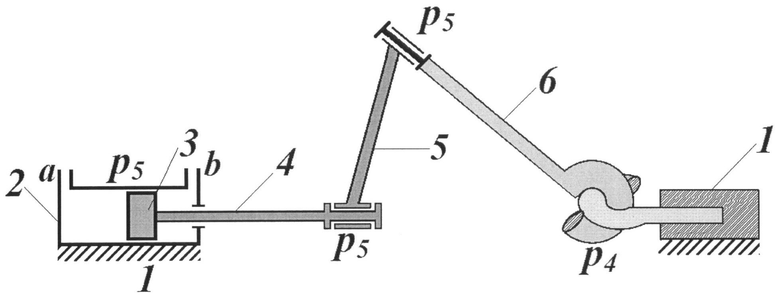
На чертеже показан пространственный четырехзвенный механизм. Механизм состоит из неподвижного звена (стойки) 1, на котором жестко установлен гидроцилиндр 2 возвратно-поступательного действия, ведущего звена 3-4, выполненного в виде поршня 3, соединенного со штоком 4 за одно целое, шатуна 5 и пространственного коромысла 6. Гидроцилиндр 2 образует с поршнем 3 поступательную пару пятого класса, шток 4 образует с шатуном 5 вращательную пару пятого класса, пространственное коромысло 6 входит с шатуном 5 во вращательную пару пятого класса и со стойкой 1 в двухподвижную пару четвертого класса. Таким образом, в механизме используется 3 подвижных звена (w=3), три пары пятого класса (р5=3) и одна пара четвертого класса (р4=1). Подвижность механизма определится по формуле [1, стр.85, формула 3.7]
W=4n-3p5-2p4=4·3-3·3-2·1=12-11=1.
Полученный результат доказывает, что механизм имеет одну степень свободы и движение в нем задается одному звену.
Работает механизм следующим образом. При подаче рабочего агента (жидкости или газа) через гидро - или пневмоканал a приходит в движение поршень 3 со штоком 4. Перемещаясь вдоль оси цилиндра, поршень 3 ведущего звена 3-4 воздействует через вращательную пару звеньев 4-5 на шатун 5, который в свою очередь через вращательную пару звеньев 5-6 воздействует на коромысло 6, принуждая его к пространственному движению относительно стойки 7 в паре 6-1. Возврат ведущего звена 3-4 в первоначальное положение осуществляется подачей рабочего агента через гидро - или пневмоканал b. Все точки коромысла 6 описывают пространственные кривые, которые могут быть использованы для различных целей, например для воспроизведения пространственных кривых или обеспечения движения различных инструментов.
Использованные источники
1. Артоболевский И.И. Теория механизмов / И.И.Артоболевский. - М.: Изд-во «Наука», 1965. - 776 с.
2. Озол О.Г. Теория механизмов и машин / О.Г.Озол. - М.: Изд-во «Наука», Главная редакция физико-математической литературы, 1984. - 432 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ДЛЯ ВЫЧЕРЧИВАНИЯ ПРОСТРАНСТВЕННЫХ КРИВЫХ | 2017 |
|
RU2668414C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ ВИНТО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2595101C1 |
| ВИНТОРЫЧАЖНЫЙ СМЕСИТЕЛЬНЫЙ МЕХАНИЗМ | 2018 |
|
RU2687407C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2557322C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С КРУГОВЫМ РЫЧАЖНЫМ ОСНОВАНИЕМ | 2017 |
|
RU2667236C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЁХПОДВИЖНЫМ ПРИВОДОМ | 2015 |
|
RU2595100C1 |
| ПРОСТРАНСТВЕННЫЙ СМЕСИТЕЛЬНЫЙ МЕХАНИЗМ | 2012 |
|
RU2484886C1 |
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 2010 |
|
RU2446331C1 |
| Трехзвенное кинематическое соединение с тремя относительными движениями | 2015 |
|
RU2610239C1 |
| ПРОСТРАНСТВЕННЫЙ ТЕСТОМЕСИЛЬНЫЙ МЕХАНИЗМ | 2006 |
|
RU2305406C1 |
Изобретение относится к механизмам, применяемым в технике для получения заданного движения ведомого звена. Предложен пространственный четырехзвенный механизм, включающий ведущее звено, шатун, коромысло и стойку, отличающийся тем, что на стойке жестко установлен гидроцилиндр возвратно-поступательного действия, входящий с ведущим звеном в поступательную пару, а кинематические пары, соединяющие шатун с ведущим звеном и коромыслом, выполнены вращательными, при этом пара, соединяющая коромысло со стойкой, выполнена двухподвижной. Предложенное изобретение обеспечивает создание пространственного четырехзвенного механизма, имеющего одну степень свободы. 1 ил.
Пространственный четырехзвенный механизм, включающий ведущее звено, шатун, коромысло и стойку, отличающийся тем, что на стойке жестко установлен гидроцилиндр возвратно-поступательного действия, входящий с ведущим звеном в поступательную пару, а кинематические пары, соединяющие шатун с ведущим звеном и коромыслом, выполнены вращательными, при этом пара, соединяющая коромысло со стойкой, выполнена двухподвижной.

