Изобретение относится к машиностроению и может быть использовано при создании пространственных четырехзвенных механизмов для воспроизведения пространственных кривых или обеспечения движения различных инструментов.
Известен шарнирный механизм с четырьмя вращательными кинематическими парами (p5) [1, стр.88, рис.156]. В этом механизме всего три подвижных звена: кривошип, ползун и шатун, но этот механизм не может относиться к пространственным, все его звенья совершают движения в одной плоскости.
Наиболее близким к предлагаемому механизму является пространственный стержневой механизм [2, с.94, рис.30]. Однако в этом механизме используются две кинематические пары пятого класса, которые образуются между входным звеном и стойкой, а также между выходным звеном и стойкой, остальные две выполнены кинематической парой третьего класса - сферической, и кинематической парой четвертого класса - сферической с пальцем. Недостатком такого механизма является сложность реального выполнения сферической с пальцем кинематической пары.
Задачей изобретения является создание такой схемы пространственного чегырехзвенного механизма, в которой будет использоваться более простая в изготовлении кинематическая пара четвертого класса.
Сущность изобретения заключается в том, что предлагается пространственный четырехзвенный кривошипно-ползунный механизм, включающий кривошип, шатун и ползун, при этом кривошип, образующий вращательную кинематическую пару со стойкой, снабжен сквозным криволинейным пазом, а шатун, входящий в сферическую кинематическую пару с ползуном, снабжен эллиптическим цилиндром, при этом сквозной криволинейный паз и эллиптический цилиндр образуют между собой двухподвижную кинематическую пару.
Схема предлагаемого механизма показана на чертеже.
Механизм состоит из неподвижного звена - стойки 1, относительно которой рассматривается движение, и трех подвижных звеньев: кривошипа 2, шатуна 3, и ползуна 4. Кривошип 2, образующий со стойкой 1 вращательную кинематическую пару пятого класса (p5), снабжен сквозным криволинейным пазом 5, а шатун 3, входящий в сферическую кинематическую пару (p3) с ползуном 4, снабжен эллиптическим цилиндром 6, при этом сквозной криволинейный паз 5 и эллиптический цилиндр 6 образуют между собой двухподвижную кинематическую пару (p4). Ползун 4, в свою очередь, входит со стойкой 1 в одноподвижную поступательную кинематическую пару пятого класса (p5).
Известно, что подвижность пространственных механизмов определяется формулой Малышева А.П. [1, стр.67, формула (2.8.)], имеющей вид:
W=6n-5p5-4р4-3p3-2p2-p1,
где W - подвижность механизма,
n - число подвижных звеньев,
р5 р4 р3 р2 p1 - числа КП пятого, четвертого, третьего, второго и первого классов соответственно.
В предлагаемом четырехзвеннике, где три подвижных звена (n=3), две пары пятого класса (p5=2), одна пара четвертого класса (p4=1) и одна пара третьего класса (р3=1), получаем
W=6·3-5·2-4·1-3·1=1,
таким образом, если задать движение кривошипу 1, все остальные звенья будут двигаться вполне определенно.
Работает механизм следующим образом: при воздействии на кривошип 2 он начнет вращаться в определенной плоскости. При вращении кривошип 2, перемещаясь по окружности, воздействует сквозным криволинейным пазом 5 на эллиптический цилиндр 6, приводя в движение шатун 3, который, в свою очередь, начинает воздействовать через сферическую кинематическую пару (p3) на ползун 4, заставляя его двигаться поступательно по прямой. Все точки шатуна 3 описывают сложные пространственные кривые, которые могут быть использованы для различных целей, например для воспроизведения пространственных кривых или обеспечения движения различных инструментов.
Использованные источники
1. Артоболевский И.И. Теория механизмов. Изд-во «Наука», 1965.
2. Левитский Н.И. Теория механизмов и машин. Изд-во «Наука», 1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ ВИНТО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2595101C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ | 2012 |
|
RU2513776C1 |
| УРАВНОВЕШЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2583329C2 |
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 2010 |
|
RU2446331C1 |
| ПРОСТРАНСТВЕННЫЙ КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ ВТОРОГО СЕМЕЙСТВА | 2010 |
|
RU2422703C1 |
| МЕХАНИЗМ ДЛЯ ВЫЧЕРЧИВАНИЯ ПРОСТРАНСТВЕННЫХ КРИВЫХ | 2017 |
|
RU2668414C1 |
| Уравновешенный кривошипно-ползунный механизм | 2017 |
|
RU2666994C1 |
| Устройство для перемешивания | 2022 |
|
RU2788075C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2013 |
|
RU2548087C1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ ПРЕССА | 2006 |
|
RU2326765C1 |
Изобретение относится к машиностроению и может быть использовано при создании пространственных четырехзвенных механизмов, воспроизведения пространственных кривых или обеспечения движения различных инструментов. Пространственный четырехзвенный кривошипно-ползунный механизм включает кривошип, шатун и ползун. При этом кривошип, образующий вращательную кинематическую пару со стойкой, снабжен сквозным криволинейным пазом. Шатун, входящий в сферическую кинематическую пару с ползуном, снабжен эллиптическим цилиндром. При этом сквозной криволинейный паз и эллиптический цилиндр образуют между собой двухподвижную кинематическую пару. Достигается упрощение конструкции. 1 ил.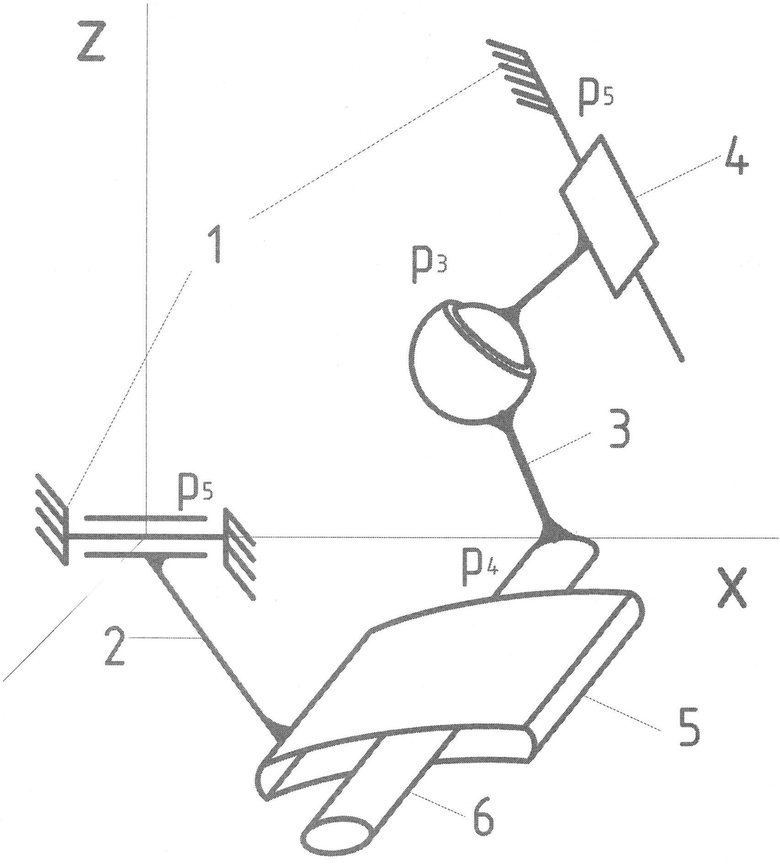
Пространственный четырехзвенный кривошипно-ползунный механизм, включающий кривошип, шатун и ползун, отличающийся тем, что кривошип, образующий вращательную кинематическую пару со стойкой, снабжен сквозным криволинейным пазом, а шатун, входящий в сферическую кинематическую пару с ползуном, снабжен эллиптическим цилиндром, при этом сквозной криволинейный паз и эллиптический цилиндр образуют между собой двухподвижную кинематическую пару.
| Многозвенный пространственный механизм | 1986 |
|
SU1312288A1 |
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 2010 |
|
RU2446331C1 |
| Прибор для непрерывной проверки шага ходовых винтов | 1951 |
|
SU94515A1 |
| JP S 60205069 A, 19.07.2007 | |||

