Изобретение относится к машиностроению и может быть использовано при создании пространственных четырехзвенных механизмов с тремя вращательными кинематическими парами пятого класса (p5) - шарнирами.
Известен шарнирный механизм с четырьмя вращательными кинематическими парами (p5) [1, стр.88, рис.156]. В этом механизме всего три подвижных звена: кривошип, ползун и шатун, но этот механизм не может относиться к пространственным, все его звенья совершают движения в одной плоскости.
Наиболее близким к предлагаемому механизму является пространственный стержневой механизм [2, стр.90, рис.29]. Однако в этом механизме используются всего две кинематические пары пятого класса - шарниры, которые образуются между входным звеном и стойкой, а также между выходным звеном и стойкой, остальные две выполнены кинематическими парами третьего класса - сферической и четвертого класса - сферической с пальцем. Недостатком такого механизма является сложность реального выполнения сферической с пальцем кинематической пары.
Задачей изобретения является создание такого пространственного четырехзвенного механизма, в котором три кинематические пары выполняются вращательными, то есть пятого класса.
Сущность заявленного устройства заключается в том, что предлагается пространственный шарнирный четырехзвенник, содержащий ведущее звено, шатун, коромысло и стойку, в котором ведущее звено соединено со стойкой через сферический поршень, помещенный в гидро- или в пневмоцилиндр с установкой между сферическим поршнем и корпусом цилиндра упругого элемента, при этом сам поршень и шатун, шатун и коромысло, а также коромысло со стойкой образуют вращательные кинематические пары пятого класса - шарниры.
Схема предлагаемого механизма показана на чертеже. Он состоит из подвижного звена - стойки 0, относительно которой рассматривается движение, и трех подвижных звеньев: ведущего звена 1, шатуна 2, коромысла 3. Ведущее звено 1 со стойкой 0 образует четырехподвижную кинематическую пару второго класса (р2), то есть оно имеет относительно стойки три вращательных движения и одно поступательное, такие кинематические пары описаны в [1, стр.58, рис.96], где показаны все четыре относительных движения звеньев. В предлагаемом механизме ведущее звено 1 и шатун 2, а также шатун 2 и коромысло 3, коромысло 3 и стойка 0 образуют вращательные кинематические пары пятого класса (р5) - шарниры.
Известно, что подвижность пространственных механизмов определяется формулой Малышева А.П. [1, стр.67, формула (2.8.)], имеющей вид:

где W - подвижность механизма, n - число подвижных звеньев, p5 - число кинематических пар 5-го класса, р4, p3, p2 и p1 - числа кинематических пар соответственно четвертого, третьего, второго и первого классов. В предлагаемом четырехзвеннике, где три подвижных звена (n=3), три кинематические пары пятого класса (p5=3) и одна кинематическая пара второго класса (p2=1), получаем:
W=6·3-5·3-2·1=1,
то есть, если задать движение сферическому поршню 5, все остальные звенья будут двигаться вполне определенно.
Работает механизм следующим образом, при подаче в цилиндр 4 через гидро- или пневмоканал 7 рабочей жидкости или газа приходит в движение сферический поршень 5. Перемещаясь вдоль оси цилиндра и вращаясь вокруг трех геометрических осей, сферический поршень 5 ведущего звена 1 воздействует через вращательную пару - шарнир 1-2 на шатун, который в свою очередь через вращательную пару - шарнир 2-3 воздействует на коромысло, принуждая его вращаться относительно стойки 0 во вращательной паре 3-0. Возврат звена 1 в первоначальное положение осуществляется упругим элементом - пружиной 6. Все точки шатуна 2 описывают сложные пространственные кривые, которые могут быть использованы для различных целей, например для воспроизведения пространственных кривых или обеспечения движения различных инструментов.
Использованные источники
1. Артоболевский И.И. Теория механизмов. Изд-во «Наука», 1965.
2. Левитский Н.И. Теория механизмов и машин. Изд-во «Наука», 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ | 2012 |
|
RU2513776C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЁХПОДВИЖНЫМ ПРИВОДОМ | 2015 |
|
RU2595100C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ ВИНТО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2595101C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2557322C1 |
| ПРОСТРАНСТВЕННЫЙ СМЕСИТЕЛЬНЫЙ МЕХАНИЗМ | 2012 |
|
RU2484886C1 |
| ПРОСТРАНСТВЕННЫЙ КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ ВТОРОГО СЕМЕЙСТВА | 2010 |
|
RU2422703C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 2024 |
|
RU2833554C1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2010 |
|
RU2439329C1 |
| ПРОСТРАНСТВЕННЫЙ ТРЕХЗВЕННЫЙ ПОВОРОТНЫЙ МЕХАНИЗМ | 2009 |
|
RU2404384C2 |
| МЕХАНИЗМ ДЛЯ ВЫЧЕРЧИВАНИЯ ПРОСТРАНСТВЕННЫХ КРИВЫХ | 2017 |
|
RU2668414C1 |
Изобретение относится к машиностроению и может быть использовано при создании пространственных четырехзвенных механизмов. Пространственный шарнирный четырехзвенник содержит ведущее звено, шатун, коромысло и стойку. Ведущее звено соединено со стойкой через сферический поршень, который помещен в гидро- или пневмоцилиндр. Между сферическим поршнем и корпусом цилиндра установлен упругий элемент. При этом сферический поршень и шатун, шатун и коромысло, а также коромысло со стойкой образуют вращательные кинематические пары пятого класса - шарниры. Техническим результатом является создание механизма для воспроизведения пространственных кривых или обеспечения движения различных инструментов. 1 ил.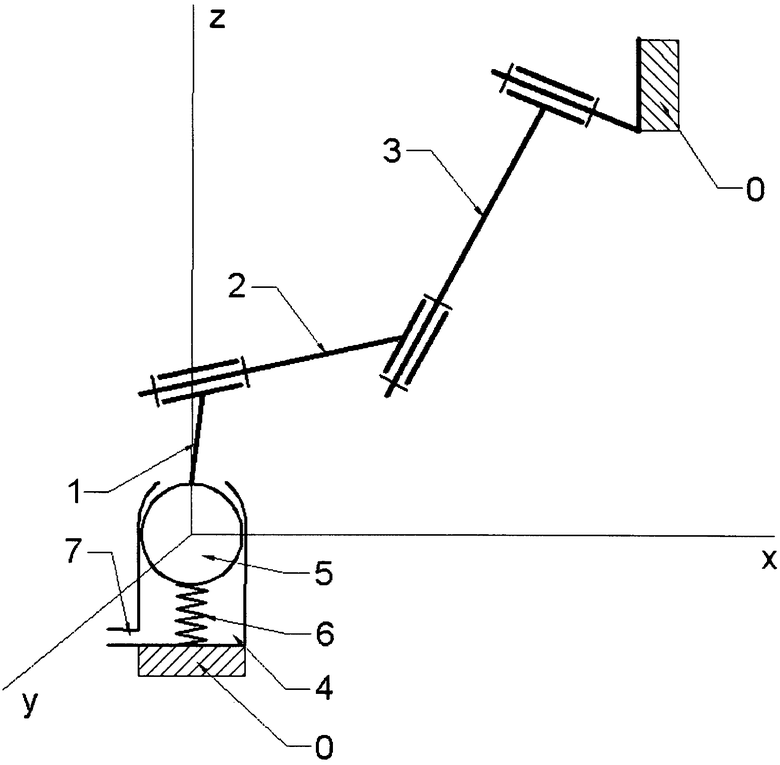
Пространственный шарнирный четырехзвенник, содержащий ведущее звено, шатун, коромысло и стойку, отличающийся тем, что ведущее звено соединено со стойкой через сферический поршень, помещенный в гидро- или пневмоцилиндр с установкой между сферическим поршнем и корпусом цилиндра упругого элемента, при этом сам поршень и шатун, шатун и коромысло, а также коромысло со стойкой образуют вращательные кинематические пары пятого класса - шарниры.
| Малышев А.П., Воробьев П.А | |||
| Механика и конструктивные расчеты ткацких станков | |||
| Государственное научно-техническое издательство машиностроительной литературы | |||
| - М., 1960, с.83, 85, фиг.62 | |||
| Артоболевский И.И | |||
| Механизмы в современной технике: Справочное пособие | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Т.VI и VII | |||
| - М.: Наука | |||
| Главная редакция физико-математической литературы, | |||

