Изобретение относится к радиотехнике и может быть использовано в пассивных системах радиоконтроля для поиска путем обнаружения и локализации по частоте, времени, азимуту, углу места и дальности сложных сигналов декаметровых (ДКМВ) передатчиков.
Решение задач обнаружения, пеленгования и определения местоположения источников непрерывно возрастающего количества и разнообразия сложных сигналов в условиях априорной неопределенности относительно их формы и параметров является важнейшим условием обеспечения эффективности широкого парка существующих и перспективных систем ДКМВ диапазона.
Известен способ поиска декаметровых передатчиков [1], включающий поиск и пеленгование радиопередатчиков с помощью наземных пеленгационных станций, распределенных в определенных точках земной поверхности, вычисление посредством триангуляции с помощью центрального вычислителя, связанного с пеленгационными станциями, положения на земной поверхности передатчиков, запеленгованных станциями, визуализацию на экране графического пульта, связанного с центральным вычислителем, соответствующих положений передатчиков относительно пеленгационных станций.
Основным недостатком данного способа является необходимость использования для определения местоположения как минимум трех пеленгационных станций.
Известен способ поиска декаметровых передатчиков [2], свободный от этого недостатка и принятый за прототип, включающий:
- синхронный прием радиосигналов на заданном множестве частот несколькими пространственно разнесенными станциями,
- синхронное преобразование принятых радиосигналов в цифровые сигналы;
- восстановление из цифровых сигналов момента прихода и азимутального пеленга каждого принятого радиосигнала;
- определение в центральном вычислителе, связанном со всеми станциями, разности моментов прихода совпадающего по частоте радиосигнала на две станции и соответствующей этой разности линии положения на поверхности Земли;
- вычисление координат точки пересечения линии положения и пеленга одной из станций;
- идентификацию координат точки пересечения в качестве предварительных координат местоположения источника радиосигнала;
- повторение операций определения предварительных координат источника всеми возможными парами станций;
- вычисление местоположения источника радиосигнала объединением предварительных координат.
Таким образом, способ-прототип, основанный на комбинации угломерного и разностно-дальномерного способов и реализуемый, как минимум, двумя приемными станциями, может обеспечить поиск всей совокупности декаметровых передатчиков, размещаемых в любой точке Земного геоида и излучающих на заданном множестве частот.
Однако, в связи с использованием разностно-дальномерного способа, эффективность способа-прототипа ограничивается наличием аномально больших ошибок определения линии положения, обусловленных отличием групповой скорости распространения радиоволн в ионосфере и в свободном пространстве. Кроме того, способ-прототип не использует информацию о других особенностях ионосферного радиоканала, таких как наличие поверхностного и ионосферного механизмов распространения радиоволн и образование изменяющихся во времени энергетически не доступных в точке приема пространственно-частотных областей излучения радиосигнала.
В связи с этим эффективность поиска при использовании способа-прототипа в условиях изменяющихся свойств ионосферного радиоканала, а также непрерывно возрастающего количества ДКМВ передатчиков, усложнения структуры и повышения временной и энергетической скрытности излучаемых ими сигналов резко снижается в силу:
- непроизводительных затрат при обследовании энергетически не доступных в точке приема поддиапазонов частот;
- непроизводительных затрат при обследовании энергетически доступных в точке приема поддиапазонов частот, но не представляющих интереса пространственных (угловых) областей;
- потерь из-за отсутствия адаптации операций обработки сигналов к типу (пространственная или ионосферная) распространяющейся волны.
Повышение эффективности поиска ДКМВ передатчиков при использовании способа-прототипа может быть обеспечено увеличением интервала наблюдения на каждой частоте поиска для фиксации параметров передатчиков на интервалах энергетической доступности. Однако этот путь не решает проблему, так как требует, как минимум, суточного цикла наблюдений, что приводит к потере его практической ценности.
Техническим результатом изобретения является повышение эффективности поиска широкого класса ДКМВ передатчиков, использующих сложные сигналы с априорно неизвестной структурой и параметрами, несколькими пространственно разнесенными приемными станциями (пеленгаторами-дальномерами).
Повышение эффективности поиска ДКМВ передатчиков достигается на основе дополнительной информации, извлекаемой из корректируемой прогностической модели ионосферного канала и обеспечивающей повышение эффективности поиска за счет формирования необходимого и достаточного для эффективного поиска в заданных пространственных областях сокращенного множества энергетически доступных частот поиска и для каждой энергетически доступной частоты определения типа (поверхностная или ионосферная) распространяющейся волны и сокращенного множества необходимых углов места поиска. Сокращенные множества частот и множества углов места открывают возможность выделения и исключения не принадлежащих заданной пространственной области поиска сигналов в процессе пеленгования каждым пеленгатором-дальномером. Идентификация заданных пространственных областей поиска по типу распространяющейся волны обеспечивает оптимизацию выбора триангуляционного способа определения местоположения при приеме пространственной волны или комбинации триангуляционного и однопозиционного способов при приеме ионосферной волны.
Для достижения указанного технического результата предлагается способ поиска декаметровых передатчиков, включающий синхронный прием радиосигналов на заданном множестве частот несколькими пространственно разнесенными станциями, согласно изобретению на каждой станции на заданном множестве частот формируют и периодически корректируют прогностическую модель ионосферного канала между точкой приема и точками в заданных пространственных областях поиска, по модели определяют сокращенное множество частот поиска, для каждой частоты сокращенного множества идентифицируют заданные пространственные области поиска по типу распространяющейся волны и находят сокращенное множество углов места поиска, которые используют для избирательного поиска радиосигналов передатчиков и определения их местоположения несколькими станциями.
Возможны частные случаи осуществления способа:
1. Определение сокращенного множества частот поиска осуществляют путем построения модельных амплитудно-частотных характеристик (АЧХ) для заданных пространственных областей поиска и выбора в качестве энергетически доступных для приема радиосигналов частот, на которых АЧХ превышает порог.
Это сжимает область поиска по частоте и тем самым повышает скорость и информативность поиска и местоопределения.
2. Идентификацию заданных пространственных областей поиска по типу распространяющейся волны осуществляют путем определения уровней модельных сигналов поверхностных и ионосферных волн, приходящих из заданных областей в точку приема, сравнения уровней модельных сигналов и принятия решения о наличии поверхностной или ионосферной волны при существенном превышении уровня модельного сигнала одной из них или о наличии поверхностно-ионосферной волны при сопоставимых уровнях модельных сигналов.
Это обеспечивает выбор наиболее эффективного способа определения местоположения источника принятого радиосигнала, исключает большие ошибки однопозиционного местоопределения при приеме волн с углами места, близкими к нулю, и позволяет оптимизировать по быстродействию операции последующей обработки сигналов.
3. Определение сокращенного множества углов места осуществляют путем построения модельных угловых-частотных характеристик для заданных пространственных областей поиска и выбора углов места, необходимых и достаточных для приема радиосигналов, излучаемых из заданных пространственных областей поиска.
Это сокращает область поиска по углу места и тем самым повышает скорость и информативность поиска и местоопределения.
4. Сокращенное множество углов места используют для снижения вычислительных затрат при определении угломестных пеленгов по измеренному на каждой станции амплитудно-фазовому распределению (АФР) принятого радиосигнала.
Это повышает эффективность пеленгования на каждой станции.
5. Достоверность полученных пеленгов определяют путем сравнения измеренного и модельного амплитудно-фазовых распределений пеленгуемого радиосигнала.
Это повышает точность пеленгования и определения местоположения несколькими станциями.
6. Результаты идентификации по типу волны используют при определении местоположения несколькими станциями путем выбора триангуляционного способа определения местоположения при приеме поверхностной волны или комбинации триангуляционного и однопозиционного способов при приеме ионосферной волны.
Это повышает эффективность поиска и местоопределения несколькими станциями (пеленгаторами-дальномерами).
Предложенная совокупность признаков позволяет использовать при поиске декаметровых передатчиков дополнительную информацию о закономерностях ионосферного распространения сигналов ДКМВ. Эта информация формируется с использованием модели ионосферы и применяется при избирательном, с учетом заданных пространственных областей, поиске радиосигналов передатчиков на каждой станции и определении местоположения несколькими станциями путем выбора триангуляционного способа определения местоположения при приеме поверхностной волны или комбинации триангуляционного и однопозиционного способов при приеме ионосферной волны, что приводит к достижению технического результата.
Операции способа поясняются чертежами:
Фиг.1. Структурная схема устройства поиска ДКМВ передатчиков.
Фиг.2. Особенности коррекции высотно-частотной характеристики.
Фиг.3. Схема применения амплитудно-частотной и угловой-частотной характеристик для формирования сокращенных множеств частот и углов поиска.
Фиг.4. Особенности поиска ДКМВ передатчиков.
Устройство (фиг.1), в котором реализуется предложенный способ, содержит К приемных станций (ПС), каждая из которых включает последовательно соединенные антенную систему 1, многоканальное радиоприемное устройство (РПУ) 2, многоканальный аналого-цифровой преобразователь (АЦП) 3, вычислитель пеленгов 4, вычислитель пространственных координат 5, радиомодем 6, подсистему моделирования 7 и устройство отображения 8.
Каждая станция через линию радиосвязи 9 связана с внешней системой управления и внешними системами текущей диагностики ионосферы.
Регистрация сигналов на всех станциях синхронизирована по времени от внешнего источника (приемник сигнала синхронизации не показан), что обеспечивает одновременный старт АЦП 3 всех станций. Синхронизация необходима для корреляции высокочастотных полей передатчиков когерентно принятых антеннами решетки на разных станциях [3]. Кроме внешнего сигнала высокостабильных часов, излучаемого, например, со спутника, возможна синхронизация времени от внутренних часов с высокостабильным опорным источником, установленных на каждой станции. В последнем случае необходимо периодическое сличение часов, например, с использованием реперного источника.
Антенная система 1 содержит N антенн с номерами n=1...N, объединенные в решетку. Многоканальное РПУ 2 выполнено с общим гетеродином и с полосой пропускания каждого канала, обеспечивающей одновременный прием множества радиосигналов. Общий гетеродин обеспечивает многоканальный когерентный прием радиосигналов, что является основным условием интерферометрической (голографической) регистрации комплексных сигналов волновых полей передатчиков. Кроме этого РПУ 2 обеспечивает подключение одной из антенн вместо всех антенн решетки для периодической калибровки каналов по внешнему источнику сигнала с целью устранения их амплитудно-фазовой неидентичности. Возможна калибровка по внутреннему источнику сигнала. При этом может быть использован генератор шума, выход которого также может подключаться вместо всех антенн для периодической калибровки каналов.
Минимальное число каналов устройства 2 равно двум. В этом случае один из каналов РПУ 2 постоянно подключен к одной из антенн, а второй канал последовательно во времени подключается к каждой из оставшихся антенн решетки. При этом реализуется более экономичный с точки зрения требуемого объема аппаратуры, но менее информативный метод последовательного синтеза углового спектра.
Вычислитель пеленгов 4 является многопроцессорным и обеспечивает параллельную обработку сигналов, принимаемых всеми N антеннами решетки.
Вычислитель пространственных координат 5 обеспечивает на каждой станции вычисление пространственных координат ДКМВ передатчиков триангуляционным способом или комбинацией триангуляционного и однопозиционного способов, что повышает точность и пропускную способность вычисления координат.
Радиомодем 6 совместно с линиями радиосвязи 9 обеспечивает обмен информацией между станциями и внешними системами управления и текущей диагностики ионосферы.
Устройство, реализующее способ поиска декаметровых передатчиков, работает следующим образом.
Радиосигналы передатчиков на заданном множестве частот поступают на антенные системы 1 всех станций.
На каждой станции, с помощью РПУ 2, на заданном множестве частот когерентно принимаются временные сигналы xn(f), где n=1...N - номер антенны решетки, а в подсистеме моделирования 7 на заданом множестве частот формируется и периодически корректируется прогностическая модель ионосферного канала между точкой приема и точками в заданных пространственных областях поиска.
При формировании модели ионосферного канала используется Международную справочную модель ионосферы IRI-2001 [4].
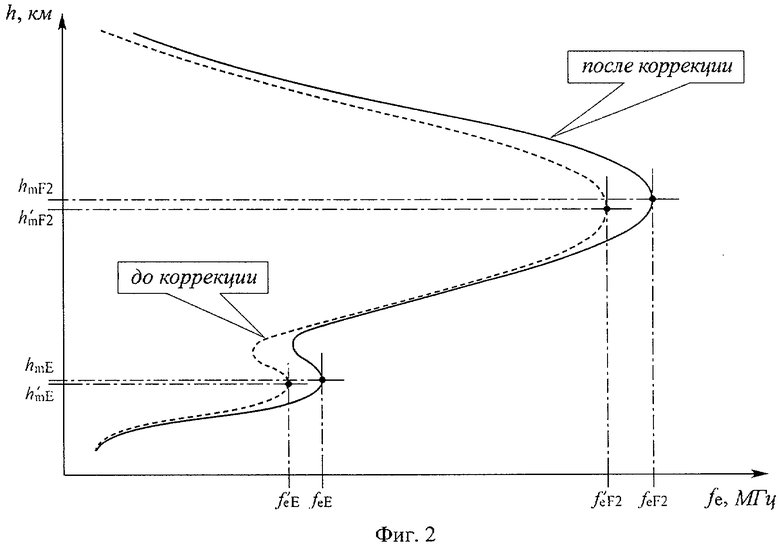
Информация о текущих параметрах ионосферы поступает через радиомодем 6 по линии радиосвязи 9 от внешних систем текущей диагностики. Основными характеристиками модели ионосферного канала являются пространственное распределение электронной концентрации (ПРЭ), амплитудно-частотная (АЧХ) и угловая-частотная (УЧХ) характеристики. ПРЭ описывает зависимость плазменной частоты электронов fe от трех пространственных координат (широты, долготы и высоты). В частном случае для произвольной точки, расположенной на поверхности Земного геоида, ПРЭ вырождается в высотное распределение электронной концентрации (ВРЭ).
На фиг.2 в качестве примера представлено ВРЭ, представляющее собой графическую зависимость высоты отражения сигнала от слоев Е и F2 как функцию плазменной частоты fe до и после коррекции, выполненной в "узловых" точках. Из фиг.2 следует, что использование информации текущей диагностики позволяет уточнить параметры модели ионосферы.
Кроме того, в подсистеме 7 каждой станции с использованием сформированной модели выполняются следующие действия:
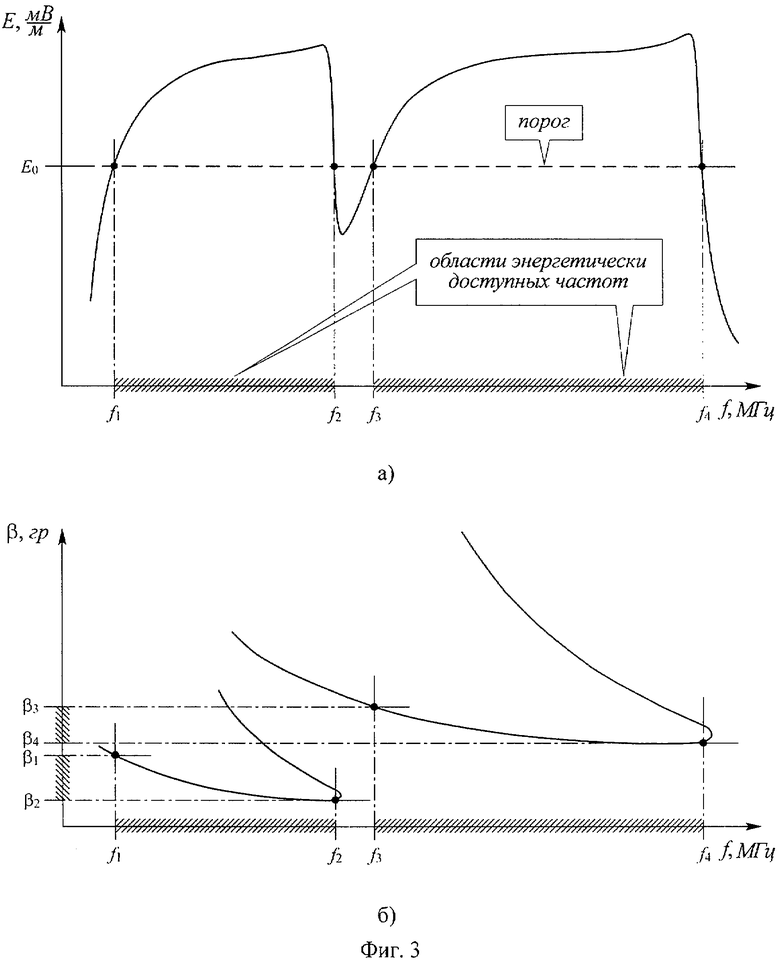
- определяется сокращенное множество частот поиска путем построения модельных АЧХ для заданных пространственных областей поиска и выбора в качестве энергетически доступных для приема радиосигналов частот, на которых АЧХ превышает порог (фиг.3а). Найденное сокращенное множество частот поиска для примера, представленного на фиг.3, равное (f1, ..., f2) и (f3, ..., f4), поступает в вычислитель пеленгов 4;
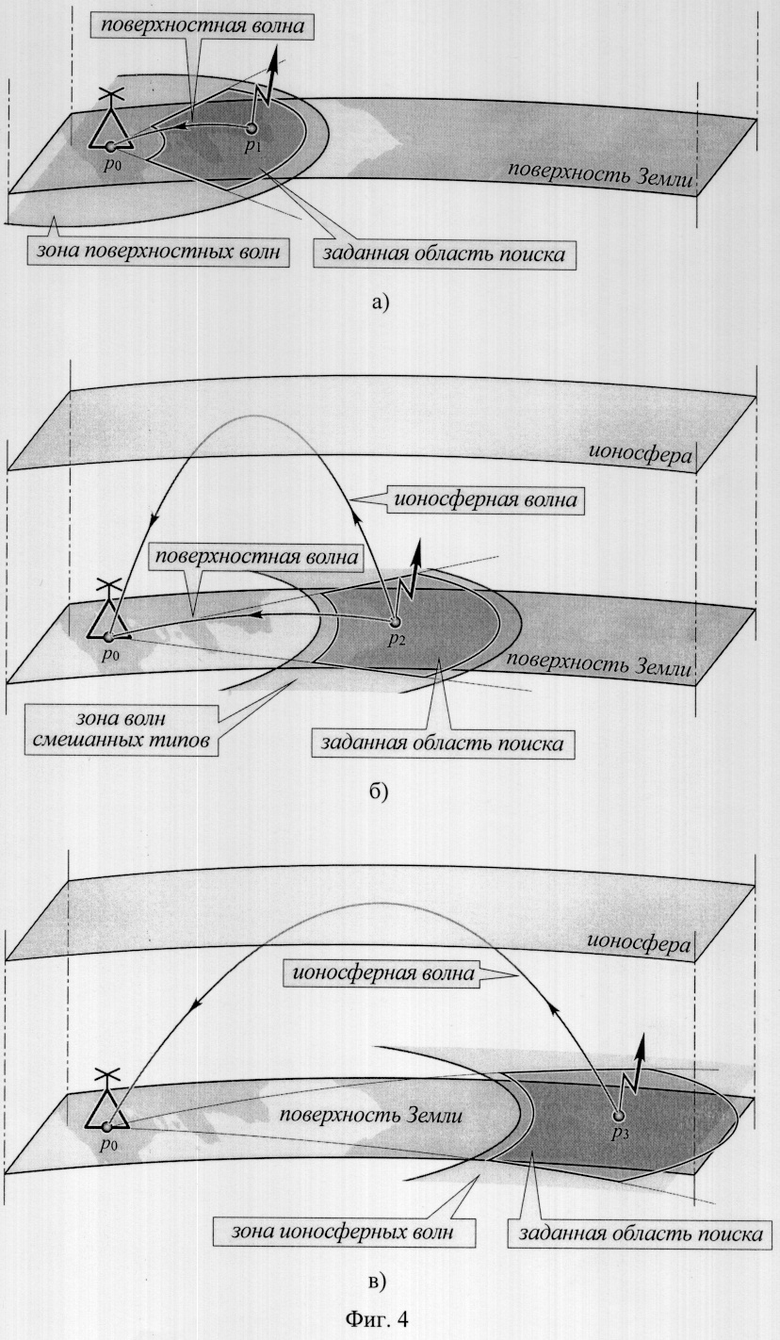
- для каждой частоты сокращенного множества (f1, ..., f2) и (f3, ..., f4) идентифицируются заданные пространственные области поиска по типу распространяющейся волны путем определения уровней модельных сигналов поверхностных и ионосферных волн, приходящих из заданных областей в точку приема, сравнения уровней модельных сигналов и принятия решения о наличии поверхностной или ионосферной волны при существенном превышении уровня модельного сигнала одной из них или о наличии поверхностно-ионосферной волны при сопоставимых уровнях модельных сигналов. На фиг.4 представлены примеры возможных областей поиска и соответствующих им типов распространяющихся волн. Идентифицированный тип распространяющейся волны (поверхностная - фиг.4а; волны смешанных, поверхностная и ионосферная, типов - фиг.4б; ионосферная - фиг.4в) поступает в вычислитель 4 и вычислитель 5;
- для каждой частоты сокращенного множества (f1, ..., f2) и (f3, ..., f4) находится сокращенное множество углов места (β1, ..., β2) и (β3, ..., β4) поиска путем построения модельных угловых-частотных характеристик для заданных пространственных областей поиска и выбора углов места, необходимых и достаточных для приема радиосигналов, излучаемых из заданных пространственных областей поиска (фиг.3б). Сокращенные множества частот (f1, ..., f2) и (f3, ..., f4) и углов места (β1, ..., β2) и (β3, ..., β4) поступают в вычислитель 4.
С помощью АЦП 3 каждой станции когерентно принятые РПУ 2 в широкой полосе, например 2-30 МГц, сигналы xn(t) синхронно преобразуются на всех станциях в цифровые сигналы xn(z), где z - номер временного отсчета сигнала, и регистрируются в вычислителе 4.
В вычислителе 4 каждой станции сокращенные множества частот (f1, ..., f2) и (f3, ..., f4), например (4 МГц, ...,9 МГц) и (12 МГц, ...,21 МГц), и углов места (β1, ..., β2) и (β3, ..., β4), например (5°, ..., 17°) и (15°, ..., 23°), используются для снижения вычислительных затрат при определении угломестных пеленгов по измеренному на каждой станции АФР принятого радиосигнала.
Понятно, что снижение вычислительных затрат и, следовательно, повышение эффективности поиска на каждой станции возрастает пропорционально отношению частотных полос и секторов углов до и после сжатия областей поиска. Для приведенных в качестве примера значений исходной 2-30 МГц и сокращенной (4 МГц, ...,9 МГц), (12 МГц, ...,21 МГц) полос выигрыш в эффективности равен 28 МГц/14 МГц = 2. Если исходное множество углов места равное (0°, ...,80°) сокращается до значений (5°, ..., 17°), (15°, ..., 23°), то дополнительный выигрыш в эффективности более существенный: 80°/20°=4.
При определении пеленгов в вычислителе 4 выполняются следующие операции:
- восстанавливаются комплексные спектры сигналов каждой антенны  , где Ft{...} - оператор БПФ по времени, а f - номер частотной дискреты;
, где Ft{...} - оператор БПФ по времени, а f - номер частотной дискреты;
- выделяются сигналы комплексных спектров ( , ...,
, ...,  ) и (
) и ( , ...,
, ...,  ) каждой антенны, принадлежащие сокращенному множеству частот (f1, ..., f2) и (f3, ..., f4);
) каждой антенны, принадлежащие сокращенному множеству частот (f1, ..., f2) и (f3, ..., f4);
- преобразованием выделенных сигналов комплексных спектров (, ..., ) и ( , ...,
, ...,  ) определяются средняя частота
) определяются средняя частота  и полоса δf частот, занимаемая спектром каждого обнаруженного на множестве частот (f1, ..., f2) и (f3, ..., f4) радиосигнала. При этом могут быть использованы различные алгоритмы. Например, алгоритм корреляции АФР, сформированных на разных частотах полосы приема в одном или разных интервалах времени [5]. Данный алгоритм эффективен при обнаружении широкого класса сложных сигналов в условиях априорной неопределенности относительно их формы и параметров;
и полоса δf частот, занимаемая спектром каждого обнаруженного на множестве частот (f1, ..., f2) и (f3, ..., f4) радиосигнала. При этом могут быть использованы различные алгоритмы. Например, алгоритм корреляции АФР, сформированных на разных частотах полосы приема в одном или разных интервалах времени [5]. Данный алгоритм эффективен при обнаружении широкого класса сложных сигналов в условиях априорной неопределенности относительно их формы и параметров;
- определяется двумерный пеленг (азимут α0 и угол места β0) на частоте каждого обнаруженного сигнала. При этом также могут быть использованы различные алгоритмы, например, алгоритм классического формирования луча [5], предусматривающий синтез двумерного комплексного углового спектра на частоте обнаруженного сигнала в сокращенном секторе углов места (β1, ..., β2)и (β3, ..., β4) следующим образом:
- формируются комплексные амплитуды сигнала каждой n-й антенны путем свертки комплексно-сопряженных спектров антенны, выбранной в качестве опорной (например, n=1), и остальных антенн  в найденной полосе δf частот обнаруженного сигнала;
в найденной полосе δf частот обнаруженного сигнала;
- определяются азимутальный α0 и угломестный β0 пеленги по максимуму реальной части двумерного комплексного углового спектра
 , где dn(m, h) - диаграмма направленности n-й антенны, m=1...М - текущий номер узла сетки по азимуту, М - число узлов по азимуту, h=1...Н;
, где dn(m, h) - диаграмма направленности n-й антенны, m=1...М - текущий номер узла сетки по азимуту, М - число узлов по азимуту, h=1...Н;
- выбираемый из сокращенного множества текущий номер узла сетки наведения решетки по углу места, Н - число узлов сокращенного множества углов места, а  - модельная фазирующая функция, зависящая от конфигурации антенной решетки.
- модельная фазирующая функция, зависящая от конфигурации антенной решетки.
Кроме того, на каждой станции в вычислителе 4 определяется достоверность полученных пеленгов путем сравнения измеренного и модельного амплитудно-фазовых распределений пеленгуемого радиосигнала.
Для этого формируется модельное АФР  волнового фронта, соответствующего найденному азимутально-угломестному пеленгу (α0, β0). Модельное АФР сравнивается с измеренным АФР
волнового фронта, соответствующего найденному азимутально-угломестному пеленгу (α0, β0). Модельное АФР сравнивается с измеренным АФР  , описывающим фактически принятый волновой фронт. Решение о достоверности пеленгования принимается, если модельное АФР
, описывающим фактически принятый волновой фронт. Решение о достоверности пеленгования принимается, если модельное АФР  и измеренное АФР
и измеренное АФР  совпадают с заданной точностью [6].
совпадают с заданной точностью [6].
Значения пеленгов по азимуту α0 и углу места β0 идентифицированный тип волны (поверхностная, ионосферная, поверхностно-ионосферная) и значение средней частоты спектра  каждого обнаруженного радиосигнала поступают в вычислитель пространственных координат 5 и при необходимости через радиомодем 6 по линии радиосвязи 9 транслируются на вычислители пространственных координат других станций.
каждого обнаруженного радиосигнала поступают в вычислитель пространственных координат 5 и при необходимости через радиомодем 6 по линии радиосвязи 9 транслируются на вычислители пространственных координат других станций.
В вычислителе 5 каждой станции результаты идентификации по типу волны используются при определении местоположения передатчиков. При этом выбирается триангуляционный способ определения местоположения в случае приема сигнала поверхностной волны или комбинация триангуляционного и однопозиционного способов в случае приема сигнала ионосферной волны.
Для повышения информативности средняя частота спектра  каждого обнаруженного радиосигнала, значения его азимутального α0 и угломестного β0 пеленгов и пространственные координаты передатчика отображаются в устройстве отображения 8.
каждого обнаруженного радиосигнала, значения его азимутального α0 и угломестного β0 пеленгов и пространственные координаты передатчика отображаются в устройстве отображения 8.
Из приведенного описания следует, что устройство, реализующее предложенный способ, обеспечивает высоко эффективный поиск по частоте, времени и пространству широкого класса ДКМВ передатчиков двумя и более пространственно разнесенными приемными станциями (пеленгаторами-дальномерами).
Таким образом, за счет дополнительной информации, извлекаемой из корректируемой прогностической модели ионосферного радиоканала, благодаря введению операций:
- идентификации энергетически доступных в точке приема диапазонов частот;
- идентификации заданных пространственных областей поиска по типу (поверхностная или ионосферная) распространяющейся волны, минимизирующих размеры областей поиска по частоте и по пространству (углу места) и, как следствие, значительно повышающих эффективность поиска и локализации по частоте, времени, азимуту, углу места и дальности широкого класса сложных сигналов в условиях априорной неопределенности относительно их формы и параметров, удается решить поставленную задачу с достижением технического результата.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. FR, патент, 2688892, кл. G01S 3/40, 1989 г.
2. US, патент, 5719584, кл. G01S 003/02, 1998 г.
3. RU, патент, 2151406, кл. G01S 5/04, 5/14, 2000 г.
4. Bilitza D. Ionospheric Models for Radio Propagation Studies // The review of radio science 1999-2002 / Ed. W. Ross Stone, IEEE Press. 2002. PP.625-679.
5. RU, патент, 2190236, кл. G01S 5/04, 2000 г.
6. Шевченко В.Н. Пространственно-временная обработка многолучевых полей на базе корреляционного интерферометра // Радиотехника. - 2002. - №12. - С.16-20.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ КОМПЬЮТЕРНО-ИНТЕРФЕРОМЕТРИЧЕСКИХ СИСТЕМ НА ПОДВИЖНЫХ ПЛАТФОРМАХ | 2005 |
|
RU2284043C1 |
| СПОСОБ МНОГОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285935C2 |
| СПОСОБ РАДИОКОНТРОЛЯ | 2004 |
|
RU2287169C2 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285934C2 |
| СПОСОБ КАЛИБРОВКИ РАДИОПЕЛЕНГАТОРА-ДАЛЬНОМЕРА | 2005 |
|
RU2309425C2 |
| СПОСОБ КАЛИБРОВКИ ДЕКАМЕТРОВОГО РАДИОПЕЛЕНГАТОРА-ДАЛЬНОМЕРА | 2010 |
|
RU2422846C1 |
| ОДНОЭТАПНЫЙ МЕТОД ПЕЛЕНГОВАНИЯ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ В ДКМВ ДИАПАЗОНЕ С ПРИМЕНЕНИЕМ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ, СОСТОЯЩЕЙ ИЗ ВЗАИМНО ОРТОГОНАЛЬНЫХ СИММЕТРИЧНЫХ ГОРИЗОНТАЛЬНЫХ ВИБРАТОРОВ | 2016 |
|
RU2614035C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2018 |
|
RU2688199C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2009 |
|
RU2410712C1 |
Изобретение относится к радиотехнике и может быть использовано в пассивных системах радиоконтроля для поиска путем обнаружения и локализации по частоте, времени, азимуту, углу места и дальности сложных сигналов декаметровых (ДКМВ) передатчиков. Техническим результатом изобретения является повышение эффективности поиска широкого класса ДКМВ передатчиков, использующих сложные сигналы с априорно неизвестной структурой и параметрами, несколькими пространственно разнесенными приемными станциями (пеленгаторами-дальномерами). Повышение эффективности поиска достигается на основе дополнительной информации, извлекаемой из корректируемой модели ионосферного канала и обеспечивающей повышение эффективности поиска за счет формирования необходимого и достаточного для эффективного поиска в заданных пространственных областях сокращенного множества энергетически доступных частот поиска и для каждой энергетически доступной частоты определения типа (поверхностная или ионосферная) распространяющейся волны и сокращенного множества необходимых углов места поиска. 6 з.п. ф-лы, 4 ил.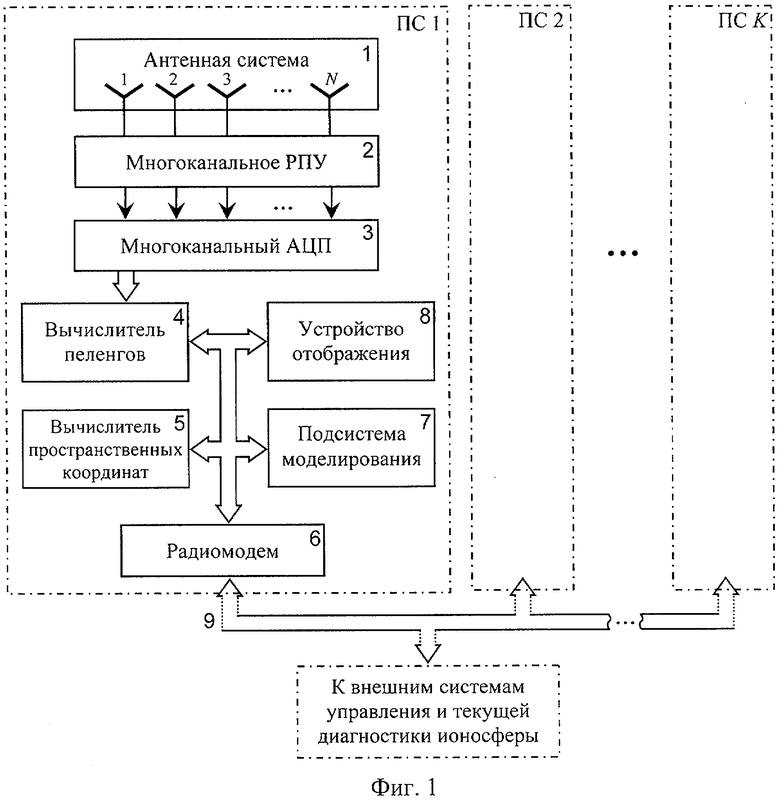
| US 5719584 А, 17.02.1998 | |||
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 1999 |
|
RU2154281C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2000 |
|
RU2204145C2 |
| СПОСОБ ПРОСТРАНСТВЕННОГО РАЗНЕСЕННОГО ПРИЕМА СИГНАЛА ОТ ИСТОЧНИКА ИЗЛУЧЕНИЯ, ПЕРЕДАННОГО ПО МНОГОЛУЧЕВОМУ КАНАЛУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2075832C1 |
| Пресс для испытания брусков из цементных растворов | 1931 |
|
SU28345A1 |
| US 2005052315 A1, 10.03.2005 | |||
| Цифровой анализатор спектра Уолша | 1982 |
|
SU1020834A1 |
| US 6163297 A, 19.12.2000. | |||

