Изобретение относится к радиолокации и может быть использовано для обнаружения различных объектов, находящихся в зоне наблюдения.
Известны устройства обнаружения объектов, содержащие передающую часть и приемную часть, приемные антенны, блок обработки сигналов (см. патент РФ №2239845, МПК G01S 13/42. G01S 13/92, приоритет от 22.07.2002 г., патент РФ №2133480, МПК G01S 3/72, G01S 7/42, приоритет от 02.02.1998 г.).
Из известных, наиболее близким по технической сущности является устройство обнаружения объекта (см. патент РФ №2133480, МПК G01S 3/72, G01S 7/42, приоритет от 02.02.1998 г.), состоящее из передающей части и приемной части, которая содержит приемные антенны, соединенные с блоком обработки сигналов, блок определения направления прихода сигнала, блок определения доплеровской частоты, блок определения поверхности положения, блок определения траекторных параметров. Данное устройство предназначено для определения параметров движения объектов. Недостатком такого устройства является бистатический вариант расположения радиолокационной системы. То есть приемная и передающая части устройства обнаружения объекта должны быть разнесены в пространстве. Кроме того, при эксплуатации данного устройства, при обнаружении объекта, возможна двойная дифракция электромагнитного сигнала на облучаемом объекте (на луче “излучатель-рассеиватель" и на луче "рассеиватель-приемник"). Такая двойная дифракция является помеховым фактором, затрудняющим обнаружение искомых объектов, снижающим достоверность обнаружения объектов, что существенно уменьшает качество локации.
Задачей, на решение которой направлено предлагаемое техническое решение, является реализация моностатического варианта радиолокационной системы и повышение достоверности обнаружения объектов в зоне наблюдения.
Технический результат выражается в возможности моностатического расположения приемной и передающей частей заявляемого устройства, а также в увеличении достоверности локации объектов за счет использования помехового фактора (при анализе принятого сигнала), вызванного двойной дифракцией радиолокационного сигнала на искомом объекте.
Результат достигается тем, что в устройстве обнаружения объекта, состоящем из передающей части и приемной части, которая содержит приемные антенны, соединенные с блоком обработки сигналов, блок определения направления прихода сигнала, блок определения доплеровской частоты, блок определения поверхности положения, блок определения траекторных параметров, согласно изобретению, упомянутый блок обработки сигналов выполнен из N (N>2) идентичных, не зависимых друг от друга каналов, количество приемных антенн определено по числу каналов, каждая приемная антенна выполнена идентично другим независимой от других приемных антенн и соединена с соответствующим каналом блока обработки сигналов, передающая часть выполнена с информационным выходом, а приемная часть дополнительно содержит блок определения текущей дифракционно-интерференционной картины, блок сравнения дифракционно-интерференционных картин, блок хранения информации, блок определения координат и вектора скорости, блок принятия решений и управления, причем, выход каждого из каналов блока обработки сигналов соединен с блоком определения текущей дифракционно-интерференционной картины, с блоком определения направления прихода сигнала, с блоком определения доплеровской частоты, с блоком определения поверхности положения, с блоком определения траекторных параметров, выход блока определения направления прихода сигнала, выход блока определения доплеровской частоты, выход блока определения поверхности положения, выход блока определения траекторных параметров соединены с блоком сравнения дифракционно-интерференционных картин, с блоком определения координат и вектора скорости, с блоком принятия решений и управления, выход блока определения текущей дифракционно-интерференционной картины соединен с блоком сравнения дифракционно-интерференционных картин, выход которого соединен с блоком определения координат и вектора скорости и с блоком принятия решений и управления, кроме того, информационный выход передающей части соединен с блоком определения координат и вектора скорости, блок сравнения дифракционно-интерференционных картин соединен с блоком хранения информации, а блок определения координат и вектора скорости соединен с блоком принятия решений и управления, выход которого соединен с передающей частью.
На дату подачи материалов заявки авторам не известно техническое решение, совокупность существенных отличительных признаков которого совпадает с заявляемой.
Функциональная схема устройства обнаружения объекта представлена на чертеже.
Устройство включает в себя передающую часть 1 и приемную часть 2, которая содержит N приемных антенн 3, блок 4 обработки сигналов, блок 5 определения направления прихода сигнала, блок 6 определения доплеровской частоты, блок 7 определения поверхности положения, блок 8 определения траекторных параметров. Блок 4 имеет N каналов 9 обработки сигналов (по числу приемных антенн 3). Передающая часть 1 снабжена информационным выходом 10. Кроме того, приемная часть 2 содержит блок 11 определения текущей дифракционно-интерференционной картины, блок 12 сравнения дифракционно-интерференционных картин, блок 13 хранения информации, блок 14 определения координат и вектора скорости, блок 15 принятия решений и управления. При этом каждая из N приемных антенн 3 соединена с соответствующим каналом 9 блока 4 обработки сигналов. Выход каждого из каналов 9 блока 4 обработки сигналов соединен с блоком 11 определения текущей дифракционно-интерференционной картины, с блоком 5 определения направления прихода сигнала, с блоком 6 определения доплеровской частоты, с блоком 7 определения поверхности положения, с блоком 8 определения траекторных параметров. Выход блока 5 определения направления прихода сигнала, выход блока 6 определения доплеровской частоты, выход блока 7 определения поверхности положения, выход блока 8 определения траекторных параметров соединены с блоком 12 сравнения дифракционно-интерференционных картин, с блоком 14 определения координат и вектора скорости, с блоком 15 принятия решений и управления. Выход блока 11 определения текущей дифракционно-интерференционной картины соединен с блоком 12 сравнения дифракционно-интерференционных картин, выход которого соединен с блоком 14 определения координат и вектора скорости и с блоком 15 принятия решений и управления. Кроме того, информационный выход 10 передающей части 1 соединен с блоком 14 определения координат и вектора скорости, блок 12 сравнения дифракционно-интерференционных картин соединен с блоком 13 хранения информации, а блок 14 определения координат и вектора скорости соединен с блоком 15 принятия решений и управления, выход которого соединен с передающей частью 1.
Предлагаемое устройство обнаружения объекта функционирует следующим образом.
Передающая часть 1 излучает радиолокационный сигнал, который, распространяясь в зоне наблюдения, при достоверном отсутствии объекта, отражается, например, от тропосферных неоднородностей и принимается приемной частью 2. При этом характеристики принятого сигнала фиксируются в блоке 13 хранения информации как эталонный вариант характеристик и дифракционно-интерференционной картины (ДИК) для случая достоверного отсутствия объекта в зоне наблюдения.
В случае присутствия объекта в зоне наблюдения, радиолокационный сигнал отражается (в направлении приемной части 2, т.е. в направлении передающей части 1, в случае моностатического расположения устройства обнаружения объекта) от лоцируемого объекта, как и от рассеивателя (например, тропосферных неоднородностей). В зоне расположения приемной части 2 формируется ДИК, соответственно изложенному в патенте РФ №2296343 (МПК G01S 13/00, приоритет от 19.10.2005 г., опубликован в бюл. №9, 2007 г.). Для достоверного определения амплитудных и фазовых параметров принимаемых сигналов, количество приемных антенн 3 должно быть не менее трех, при идентичности их исполнения. Как правило, такая антенная решетка состоит из независимых всенаправленных приемных антенн (например, штыревых антенн) или дипольных либо рамочных антенн. Для обработки сигнала (выделения его по амплитуде, частоте и фазе), принятый сигнал с каждой из приемных антенн 3 поступает в соответствующий канал 9 блока 4 обработки сигналов, выполненный соответственно изложенному в описании устройства-прототипа.
С выхода каждого канала 9 блока 4 обработки сигналов, сигнал поступает на блок 5 определения направления прихода сигнала, на блок 6 определения доплеровской частоты, на блок 7 определения поверхности положения, на блок 8 определения траекторных параметров (выполненные и функционирующие соответственно изложенному в описании устройства-прототипа). Кроме того, названный сигнал, с каждого из каналов 9 поступает на блок 11 определения текущей ДИК.
Блок 11 определения текущей ДИК выполнен, например, в виде многофункционального процессора (например, процессор Intel® Core™ 2 Duo или процессор AMD Phenom™ II, с приданным ОЗУ), функционирующего с использованием программного обеспечения, реализующего процедуры, описанные в патенте РФ №2296343. При этом программными средствами обеспечивается пространственное фиксирование амплитуды сигнала, принимаемого каждой из пространственно разнесенных приемных антенн 3.
Текущая ДИК поступает из блока 11 определения текущей ДИК на блок 12 сравнения ДИК, выполненный в виде устройства сравнения параметров, например, как многофункциональный процессор (например, процессор Intel® Core™ 2 Duo или процессор AMD Phenom™ II, с приданным ОЗУ), функционирующий с использованием программного обеспечения, реализующего процедуры сравнения, описанные в патенте РФ №2296343. В блоке 12 сравнения ДИК производится сравнение характеристик принятого сигнала и текущей ДИК с ранее полученным эталонным значением ДИК и других параметров сигнала, для чего на блок 12 сравнения ДИК поступает информация из блока 5 определения направления прихода сигнала, из блока 6 определения доплеровской частоты, из блока 7 определения поверхности положения, из блока 8 определения траекторных параметров. Сравнение производится с информацией, содержащейся в блоке 13 хранения информации (выполненного, например, в виде ОЗУ - оперативного запоминающего устройства, необходимый объем памяти которого определяется количеством сохраняемой информации, зависящей, в том числе, от размеров зоны наблюдения, в частности, ОЗУ типа DRAM или DIMM, описанные, например, в патенте США №6,807,650, МПК G06F 17/50, G11C 8/00, приоритет от 04.12.2003 г., и в патенте США №6,977,655, МПК G09G 5/39, приоритет от 29.01.2004 г.), в который информация поступает и запоминается, по мере поступления информации в блок 12 сравнения ДИК. Результаты сравнения определяются решением о наличии/отсутствии и о характере изменения ДИК (сравнительно с эталоном), в том числе, по скорости наступления и развития таких изменений.
Исходя из результатов обработки информации (обработки ДИК, соответственно изложенному в патенте РФ №2296343) в блоке 12 сравнения ДИК, на основании данных по амплитуде, фазе и угловым характеристикам излученного радиолокационного сигнала, поступающим с информационного выхода 10 передающей части 1, в блоке 14 определения координат и вектора скорости производится определение координат и вектора скорости лоцируемого объекта. Для обеспечения достоверности полученных значений, таковые сравниваются с пеленгом на объект, его траекторией и другими характеристиками лоцируемого объекта, поступающими с блока 5 определения направления прихода сигнала, с блока 6 определения доплеровской частоты, с блока 7 определения поверхности положения, с блока 8 определения траекторных параметров на блок 14 определения координат и вектора скорости. При этом блок 14 определения координат и вектора скорости может быть выполнен, например, в виде многофункционального процессора, функционирующего с использованием программного обеспечения, реализующего процедуры, описанные в патенте РФ №2296343.
Полученная информация о координатах и векторе скорости объекта, поступившая с блока 14 определения координат и вектора скорости (при наличии обратной связи, для обеспечения требуемого управления процессом слежения за обнаруживаемым объектом), с учетом информации об изменении ДИК (с блока 12 сравнения ДИК), о пеленге на лоцируемый объект, его координатах и траектории движения (с блока 5 определения направления прихода сигнала, с блока 6 определения доплеровской частоты, с блока 7 определения поверхности положения, с блока 8 определения траекторных параметров), визуализуется и обрабатывается в блоке 15 принятия решений и управления, в котором предусмотрено возможное участие оператора. Блок 15 принятия решений и управления может быть исполнен, например, в виде встроенного или персонального компьютера (быстродействие которого является достаточным, для осуществления сопровождения лоцируемого объекта), функционирующего на основе программного обеспечения, с соответствующей реализацией возможности управления сторонним оператором. Программное обеспечение визуализует указанную полученную информацию о результатах сканирования и, при отсутствии изменения ДИК (сравнительно с эталоном), в случае отсутствия специальных команд оператора, автоматически выдает команду для продолжения сканирования зоны наблюдения. При наличии изменения ДИК и выявленных параметрах лоцируемого объекта, программное обеспечение автоматически дает команды на сопровождение выявленного объекта.
Кроме того, блок 11 определения текущей ДИК, блок 12 сравнения ДИК, блок 14 определения координат и вектора скорости и блок 15 принятия решений и управления, фактически, представляют собой распределенную кластерную сеть, что значительно увеличивает быстродействие устройства при принятии решений, в случае работы устройства в автономном режиме (без участия оператора).
Факт изменения ДИК показывает наличие постороннего объекта в зоне наблюдения.
Команды на управление передающей частью 1 (по угловым характеристикам излучения - то есть команды на сканирование зоны наблюдения или на сопровождение обнаруженного объекта) поступают от блока 15 принятия решений и управления в автоматическом режиме, или по решению оператора.
Таким образом, в предлагаемом техническом решении реализуется возможность моностатического расположения передающей и приемной частей радиолокационной системы, а также возможность, для повышения достоверности обнаружения объекта, использования помехового фактора (при анализе принятого сигнала), связанного с двойной дифракцией радиолокационного сигнала на лоцируемом объекте, вследствие формирования ДИК и регистрации ее изменения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2154840C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1998 |
|
RU2133480C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2010 |
|
RU2444757C1 |
| Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов | 2019 |
|
RU2717970C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2019 |
|
RU2714672C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2015 |
|
RU2584332C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ С ЗАЩИТОЙ ОТ ШУМОВЫХ АКТИВНЫХ ПОМЕХ | 2003 |
|
RU2246736C1 |
| Способ обнаружения вибрирующих объектов, основанный на анализе интерференционной картины, получаемой с использованием лазерных локационных станций гетеродинного типа | 2022 |
|
RU2791818C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР | 2007 |
|
RU2352958C1 |
Изобретение относится к радиолокации и может быть использовано для обнаружения различных объектов, находящихся в зоне наблюдения. Достигаемый технический результат выражается в возможности моностатического расположения приемной и передающей частей заявляемого устройства, а также в увеличении достоверности локации объектов за счет использования помехового фактора (при анализе принятого сигнала), вызванного двойной дифракцией радиолокационного сигнала на искомом объекте. Для этого в устройстве обнаружения сигнала блок обработки сигналов выполнен из N (N>2) идентичных, не зависимых друг от друга каналов, количество приемных антенн определено по числу каналов, каждая приемная антенна выполнена идентично другим независимой от других приемных антенн и соединена с соответствующим каналом блока обработки сигналов, передающая часть выполнена с информационным выходом, а приемная часть дополнительно содержит блок определения текущей дифракционно-интерференционной картины, блок сравнения дифракционно-интерференционных картин, блок хранения информации, блок определения координат и вектора скорости, блок принятия решений и управления. Перечисленные средства соединены между собой определенным образом. 1 ил.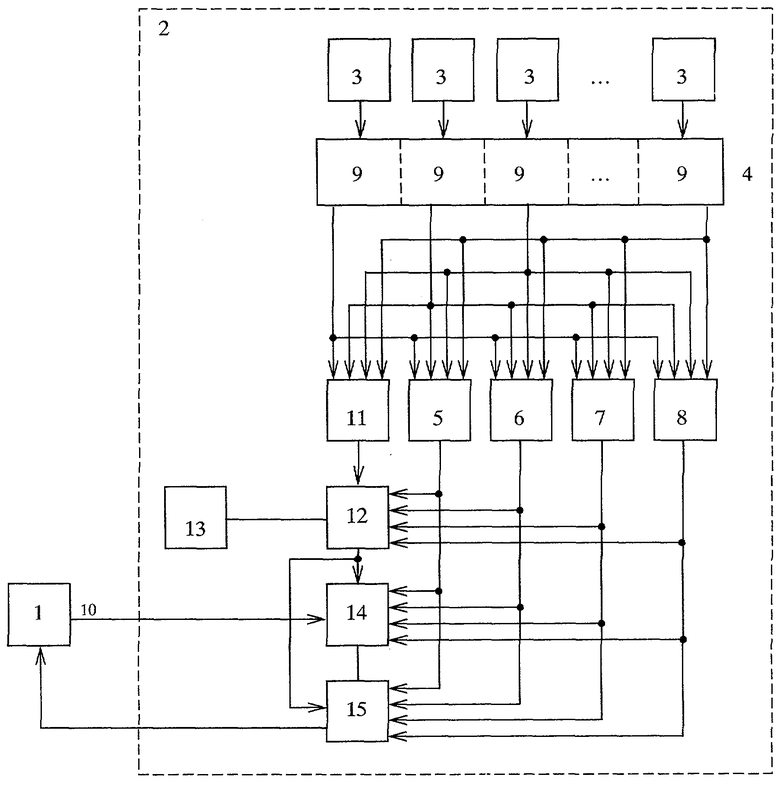
Устройство обнаружения объекта, состоящее из передающей части и приемной части, которая содержит приемные антенны, соединенные с блоком обработки сигналов, блок определения направления прихода сигнала, блок определения доплеровской частоты, блок определения поверхности положения, блок определения траекторных параметров, отличающееся тем, что упомянутый блок обработки сигналов выполнен из N (N>2) идентичных, не зависимых друг от друга каналов, количество приемных антенн определено по числу каналов, каждая приемная антенна выполнена идентично другим, независимой от других приемных антенн и соединена с соответствующим каналом блока обработки сигналов, передающая часть выполнена с информационным выходом, а приемная часть дополнительно содержит блок определения текущей дифракционно-интерференционной картины, блок сравнения дифракционно-интерференционных картин, блок хранения информации, блок определения координат и вектора скорости, блок принятия решений и управления, причем выход каждого из каналов блока обработки сигналов соединен с блоком определения текущей дифракционно-интерференционной картины, с блоком определения направления прихода сигнала, с блоком определения доплеровской частоты, с блоком определения поверхности положения, с блоком определения траекторных параметров, выход блока определения направления прихода сигнала, выход блока определения доплеровской частоты, выход блока определения поверхности положения, выход блока определения траекторных параметров соединены с блоком сравнения дифракционно-интерференционных картин, с блоком определения координат и вектора скорости, с блоком принятия решений и управления, выход блока определения текущей дифракционно-интерференционной картины соединен с блоком сравнения дифракционно-интерференционных картин, выход которого соединен с блоком определения координат и вектора скорости и с блоком принятия решений и управления, кроме того, информационный выход передающей части соединен с блоком определения координат и вектора скорости, блок сравнения дифракционно-интерференционных картин соединен с блоком хранения информации, а блок определения координат и вектора скорости соединен с блоком принятия решений и управления, выход которого соединен с передающей частью.
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1998 |
|
RU2133480C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2296343C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 2005 |
|
RU2287170C1 |
| US 2002109624 A1, 15.08.2002 | |||
| Металлический каркас многоэтажного производственного здания | 1985 |
|
SU1280093A1 |
| US 7274285 B2, 25.09.2007 | |||
| US 20030206095 A1, 06.11.2003. | |||

