Изобретение относится к области реабилитационной медицины, в частности к средствам и методам реабилитации пациентов с нарушениями опорно-двигательной функции и восстановления нервно-мышечного аппарата после перенесенных травм, и операций.
Известно техническое решение, [патенте на изобретение EP1322272 «Ортез для механизированной походки» опубл. 2010-06-16, окончания срока действия 2021-08-27]. Изобретение представляет собой реабилитационный тренажер с программно контролируемым движением, содержащий опорную раму, подвесную систему, прикрепленную к опорной раме, механизированные направляющие для нижних конечностей пациента и беговую дорожку. Пациент закрепляется в подвесной системе с помощью ремней, его нижние конечности закрепляются в направляющих механизированной системы в двух точках: в коленном суставе и в области лодыжки.
Существенным недостатком данного изобретения является тот факт, что стопы пациента касаются непосредственно беговой дорожки, без поддержки какой-либо промежуточной платформой, что, в конечном счете, может привести к некорректному процессу реабилитации в виду отсутствия фиксации и поддержки стопы и травмам.
Также известно техническое решение, [патенте на изобретение RU2054920 «Способ реабилитации опорно-двигательного аппарата и устройство для его осуществления»]. Изобретение представляет собой реабилитационный тренажер, содержащий опорную раму с подвесной системой, беговую дорожку, систему контроля движения коленных суставов из двух движущихся попеременно металлических штоков с ременными кольцами на свободных концах и тоководы, с помощью которых производится дополнительная стимуляция мускулатуры нижних конечностей. Пациента присоединяют к подвесной системе ремнями, помещают стопы на беговую дорожку, колени фиксируются ремнями системы контроля движения коленного сустава. В ходе движения сообщаются дополнительные электрические импульсы мускулатуре нижних конечностей.
Существенным недостатком изобретения является его потенциальная травмоопасность в виду использования беговой дорожки в качестве основы для технического решения. При этом отсутствует фиксация стопы, а фиксация коленного сустава - ограниченная и производится только по горизонтальной оси.
Наиболее близким техническим решением, выбранным в качестве прототипа, является тренажерный комплекс для функциональной терапии нижних конечностей и способ его применения [Патент на изобретение: 2 678 916 РФ: МПК A63B 21/00 А.А. Цигулин, Е.А. Минаев, А.О.; заявитель и патентообладатель Общество с ограниченной ответственностью "Адаптивные системы движения" (RU); заявл. 21.07.2017; опубл. 04.02.2019]. Изобретение представляет собой реабилитационный тренажер для тренировки нижних конечностей с шестью степенями свободы и метод контроля, относящийся к области техники - реабилитации. Тренажерный комплекс для механотерапии нижних конечностей , включающий в себя подвесную систему с контролем веса пациента, блоки контроля усилий и перемещений, два механических манипулятора-привода нижних конечностей и управляющее программное обеспечение, включающее в себя специальный контроллер верхнего уровня и пользовательский интерфейс, при этом каждый из механических манипуляторов-приводов нижних конечностей содержит, по крайней мере, три независимых друг от друга линейных электропривода с тремя независимыми электродвигателями, три независимых друг от друга пары кареток, перемещаемых электроприводами по линейным направляющим, закрепленным на опорной раме, и соединенных системой непересекающихся рычагов, прикрепленных с одного конца к кареткам, а с другого - к платформе, причем все 6 электродвигателей соединены с блоками контроля и перемещения, таким образом, что механические манипуляторы-приводы нижних конечностей выполнены с возможностью управляемого перемещения по трем степеням свободы. Способ управления включает следующие этапы: ввод физических параметров пациента, чтение предварительно сохраненного текстового документа, запись информации в глобальные переменные и выполнение программы.
С существенными признаками изобретения совпадает следующая совокупность признаков прототипа: тренажерный комплекс для механотерапии нижних конечностей, включает манипулятор, подвижную платформу, соединенную непересекающимися рычагами с независимыми друг от друга каретками, размещенными на направляющих манипулятора с возможностью независимого линейного перемещения по трем направлениям, блоки контроля усилий и перемещений, управляющее программное обеспечение, пользовательский интерфейс.
Недостатком прототипа являются ограниченные функциональные возможности.
Задачей заявляемого изобретения является расширение функциональных возможностей за счет обеспечения реализации дополнительного комплекса упражнений, в частности отведение бедра.
Решение задачи обеспечивается за счёт того, что тренажерный комплекс для механотерапии нижних конечностей, включает манипулятор, подвижную платформу, соединенную непересекающимися рычагами с независимыми друг от друга каретками. Каретки размещены на направляющих с возможностью независимого линейного перемещения по трем направлениям. Аппаратная часть имеет блоки контроля усилий и перемещений, управляющее программное обеспечение, пользовательский интерфейс.
В предложенном решении на подвижной платформе, которая имеет возможность перемещения по трём взаимно перпендикулярным направлениям, шарнирно установлен подвесной рычажный механизм с упругими элементами жестко зафиксированный на голеностопной части пассивного ортеза. Голеностопная и тазобедренная части пассивного ортеза соединены цилиндрическим шарниром, при этом тазобедренная часть пассивного ортеза закреплена, посредством карданного шарнира, на поддерживающем устройстве, выполненным в виде кресла регулируемого по положению спинки в вертикальной плоскости, установленного на основании, которое имеет возможность независимого линейного перемещения по двум направлениям.
Поддерживающее устройство, выполненное в виде кресла регулируемого по положению спинки в вертикальной плоскости и установленного на основании, имеющем возможность независимого линейного перемещения по двум направлениям, позволяет обеспечить физиологически необходимое размещение пациента относительно манипулятора. Для исключения анатомически противопоказанных движений конечности пациента на подвижной платформе шарнирно установлен подвесной рычажный механизм с упругими элементами жестко зафиксированный на голеностопной части пассивного ортеза кинематически объединенной с тазобедренной частью пассивного ортеза. Возможность перемещения подвижной платформы, шарнирно соединенной с непересекающимися рычагами манипулятора, по трём взаимно перпендикулярным направлениям расширяет функциональные возможности за счет обеспечения реализации дополнительного комплекса упражнений, в частности отведение бедра.
Таким образом, совокупность отличительных признаков предлагаемого решения обеспечит расширить функциональные возможности за счет обеспечения реализации дополнительного комплекса упражнений, в частности отведение бедра.
Сущность изобретения поясняется графическим материалом.
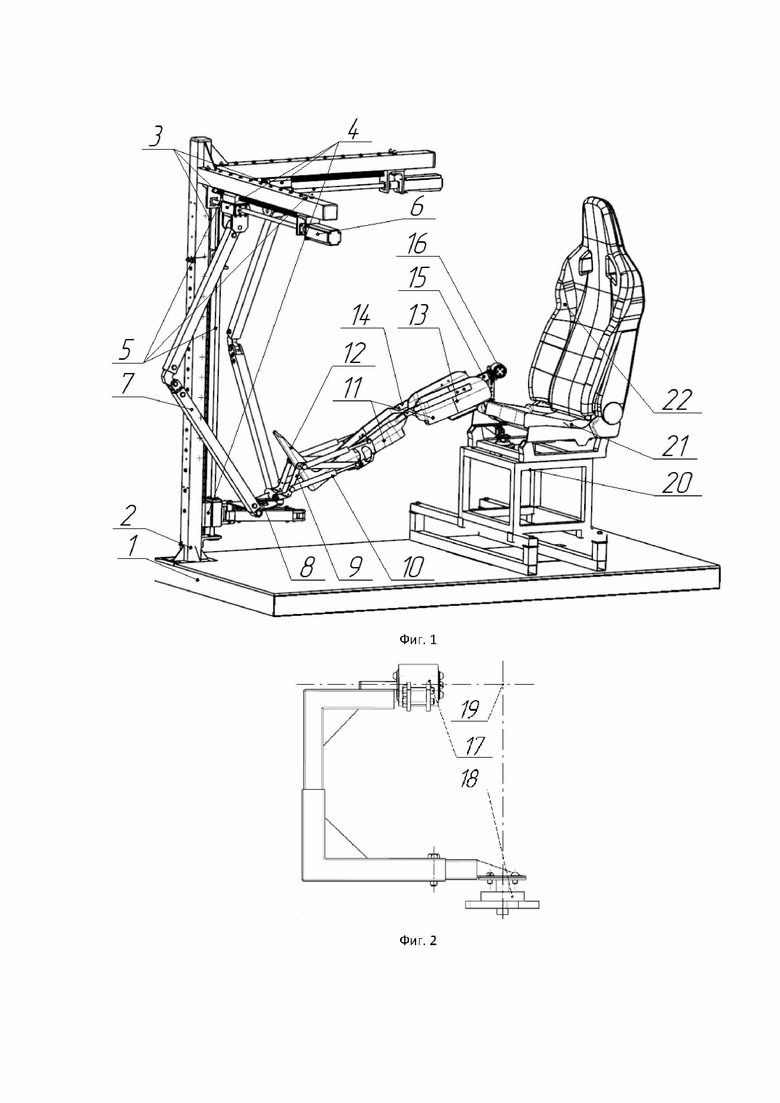
На фигуре 1 представлен общий вид тренажера для реабилитации. На фигуре 2 представлен карданный шарнир с обозначенным центром вращения.
Тренажерный комплекс для механотерапии нижних конечностей состоит из станины 1 с закрепленной на нем рамой 2, которая имеет отверстия для крепления каждой из трех направляющих 3 в соответствии с декартовыми осями координат. На каждой из трех направляющих 3 установлены подвижные картеки 4, соединенные с соответствующими тремя линейными электроприводами 5, размещенными на раме 2 и имеющие электродвигатели 6. К линейным электроприводам 5 образованным шарико-винтовыми парами (на фиг., не обозначены), шарнирно крепятся рычаги 7. Рычаги 7 образуют параллельную структуру рычагов и крепятся к подвижной платформе 8.
Подвижная платформа 8 соединена с подвесным рычажным механизмом 9, который имеет упругие элементы 10, например пневмоцилиндры, и крепится к пассивному ортезу 11. Пассивный ортез 11 представляет собой пластиковый корпус, части которого, голеностопная 12 и тазобедренная 13, кинематически объединены посредством цилиндрического шарнира 14. Пассивный ортез 11 жестко закреплен на телескопическом рычаге 15 тазобедренной части ортеза 13, который в свою очередь, соединен с карданным шарниром 16. Вращающиеся части 17 и 18 (фиг. 2), карданного шарнира разнесены относительно центра его вращения 19. Карданный шарнир 16 закреплен на основании 20, которое имеет возможность независимого линейного перемещения по двум направлениям с закрепленным на нём креслом 21, регулируемым по положению спинки 22 в вертикальной плоскости. Подвижное основание 20 с закрепленным на нём регулируемым креслом 21 представляют собой поддерживающее устройство.
В изобретении используются электроприводы 5, включающие в себя бесконтактные электродвигатели 6, датчики угла поворота ротора электродвигателя 6 и контроллеры. Контроллеры реализуют режим векторного управления и позволяют независимо задавать параметры вращения ротора электродвигателя 6 и соответственно, положение и скорость перемещения кареток 4 рычажной системы. Поскольку во время выполнения движения платформы электродвигатели 6 работают в повторно-кратковременном режиме (фазы быстрого перемещения и неподвижности конечности пациента чередуются), допускается форсирование каждого электродвигателя 6.
Для объединения трех электроприводов 5 (по одному для каждой из кареток 4) в единую систему используется программируемый логический контролер. Этот контроллер реализует прием команд управления, тригонометрические вычисления в реальном времени, необходимые для преобразования заданных координат платформы в положения и скорости кареток и соответствующие им углы роторов электродвигателей. Программируемый логический контролер осуществляет доставку команд контроллерам электродвигателей, контроль возможного скольжения электроприводов, температуры и потребляемой мощности двигателей.
Для организации пользовательского интерфейса использована технология html5 и встроенный веб-сервер, таким образом, что управление устройством осуществляется с помощью, любой существующей ЭВМ, например, планшета или настольного компьютера. Пользовательский интерфейс содержит алгоритмы движения манипулятора.
Тренажерный комплекс для механотерапии нижних конечностей работает следующим образом: пациент размещается в регулируемое кресло 21, а его конечность закрепляется в пассивный ортез 11. При этом тазобедренная часть 13 и голеностопная часть 12 пассивного ортеза фиксируются на голени и бедре пациента соответственно. Осуществляется регулировка кресла 21, в зависимости от антропометрических данных пациента и программы реабилитации, по наклону при помощи спинки 22 и положению на станине 1 за счет подвижного основания 20, которое позволяет осуществлять независимое линейное перемещение по двум направлениям. Регулировка положения пассивного ортеза относительно карданного шарнира 16 происходит за счет телескопического рычага 15. Затем в программе запускают либо заранее заложенный алгоритм, либо вводят параметры пациента вручную (численно, либо графически "перетаскиванием"). Параметры передаются и затем обрабатываются программируемым логическим контролером, преобразуя их в набор команд для электроприводов 5. Линейные электроприводы 5, закрепленные на раме 2 и связывающие электродвигатели 6 с каретками 4 путем преобразования вращательного движения в поступательное, приводят в движение каретки 4 и связанную с ними параллельную систему рычагов 7, шарнирно соединенных с подвижной платформой 8. Каретки 4 перемещаются по направляющим 3, которые закреплены на раме 2. Перемещение подвижной платформы 8 приводит в движение подвесной рычажный механизм 9 с упругими элементами, закрепленный на пассивном ортезе 11. Конечность пациента, закрепленная в пассивном ортезе 11, совершает заданное движение. При этом загруженные траектории подвижной платформы 8 позволяют эмитировать движения ноги пациента в горизонтальной и сагиттальной плоскостях. Сгибание колена пациента происходит за счет вращения цилиндрического шарнира 14, в результате перемещения подвижной платформы 8 в сторону кресла 21.
При перемещении подвижной платформы 8 по трем взаимно перпендикулярным осям вне сагиттальной плоскости и вращении карданного шарнира 16, происходит отведение бедра пациента, при этом оси вращающихся частей 17 и 18 карданного шарнира 16 пересекаются в точке вращения 19, которая в идеальных условиях совпадает с точкой вращения тазобедренного сустава пациента. В случае действия избыточной нагрузки на конечность пациента происходит сжатие упругих элементов 10, в следствии чего, программируемый логический контролер получает сигнал остановки.
В программе также предусмотрены алгоритмы: плавная остановка работы
манипулятора с выходом на безопасную и удобную позицию, экстренное торможение, а также ограничение по резкому ускорению и высокой скорости движения платформ. В случае непредвиденной, избыточной нагрузки на конечность пациента при выполнении упражнения происходит сжатие упругих элементов 10, тем самым компенсирую действующую силу. При этом сжатие цилиндра, который изначально настроен на нагрузку допустимую для пациента, приводит к срабатыванию алгоритма остановки манипулятора.
Конструкция предложенного тренажерного комплекс для механотерапии нижних конечностей позволит расширить функциональные возможности за счет обеспечения реализации дополнительного комплекса упражнений, в частности отведение бедра, кроме того позволит улучшить контроль механотерапии за счет контроля предельной нагрузки на конечность пациента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажерный комплекс для функциональной терапии нижних конечностей и способ его применения | 2017 |
|
RU2678916C1 |
| МОДУЛЬНОЕ ОРТОПЕДИЧЕСКОЕ КРЕСЛО-ТРЕНАЖЕР | 2009 |
|
RU2423961C2 |
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
| Тренажер для развития двигательных функций конечностей | 2021 |
|
RU2773616C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ФУНКЦИИ НИЖНИХ КОНЕЧНОСТЕЙ | 2007 |
|
RU2352316C1 |
| Механотерапевтическое устройство для разработки подвижности голеностопных суставов | 2017 |
|
RU2658760C1 |
| Способ реабилитации пациентов после операции эндопротезирования тазобедренного сустава по поводу коксартроза | 2023 |
|
RU2806494C1 |
| Способ отбора пациентов для экстраполяционной роботизированной механотерапии при повреждениях вращательной манжеты плеча | 2021 |
|
RU2748130C1 |
| Способ определения степени адаптации пациента при наследственных системных заболеваниях скелета | 2021 |
|
RU2767918C1 |
| Пассивный реабилитационный экзоскелет | 2017 |
|
RU2665386C1 |
Изобретение относится к медицинской технике, а именно к реабилитации пациентов с нарушениями опорно-двигательной функции и восстановления нервно-мышечного аппарата после перенесенных травм и операций. Тренажерный комплекс для механотерапии нижних конечностей включает манипулятор, подвижную платформу, соединенную непересекающимися рычагами с независимыми друг от друга каретками, размещенными на направляющих манипулятора с возможностью независимого линейного перемещения по трем направлениям и соединенными с тремя линейными электроприводами соответственно, блоки контроля усилий и перемещений, управляющее программное обеспечение и пользовательский интерфейс. На подвижной платформе, выполненной с возможностью перемещения по трём взаимно перпендикулярным направлениям, шарнирно установлен подвесной рычажный механизм с упругими элементами, жестко зафиксированный на голеностопной части пассивного ортеза, кинематически объединенной посредством цилиндрического шарнира с тазобедренной частью пассивного ортеза, которая закреплена посредством карданного шарнира на поддерживающем устройстве, выполненном в виде кресла регулируемого по положению спинки в вертикальной плоскости, установленного на основании, имеющем возможность независимого линейного перемещения по двум направлениям. Техническим результатом является расширение функциональных возможностей за счет обеспечения реализации дополнительного комплекса упражнений, в частности отведение бедра. 2 ил.
Тренажерный комплекс для механотерапии нижних конечностей, включающий манипулятор, подвижную платформу, соединенную непересекающимися рычагами с независимыми друг от друга каретками, размещенными на направляющих манипулятора с возможностью независимого линейного перемещения по трем направлениям и соединенными с тремя линейными электроприводами соответственно, блоки контроля усилий и перемещений, управляющее программное обеспечение, пользовательский интерфейс, отличающийся тем, что на подвижной платформе, выполненной с возможностью перемещения по трём взаимно перпендикулярным направлениям, шарнирно установлен подвесной рычажный механизм с упругими элементами, жестко зафиксированный на голеностопной части пассивного ортеза, кинематически объединенной посредством цилиндрического шарнира с тазобедренной частью пассивного ортеза, которая закреплена посредством карданного шарнира на поддерживающем устройстве, выполненном в виде кресла регулируемого по положению спинки в вертикальной плоскости, установленного на основании, имеющем возможность независимого линейного перемещения по двум направлениям.
| WO 2014151400 A2, 25.09.2014 | |||
| US 9108080 B2, 18.08.2015 | |||
| US 9044630 B1, 02.06.2015 | |||
| US 9682004 B2, 20.06.2017 | |||
| KR 101556851 B1, 02.10.2015 | |||
| CN 110575363 A, 17.12.2019 | |||
| CN 108553271 A, 21.09.2018. |
