Изобретение относится к области радиотехники, в частности к устройствам ограничения или подавления шумов и помех в приемнике, и может использоваться для обеспечения качественного приема сигналов (повышения помехоустойчивости и (или) обеспечения электромагнитной совместимости (ЭМС)) в условиях воздействия помех.
Известно устройство приемника бортового оборудования радиотехнической системы ближней навигации (БО РСБН) (Трояновский А.Д., Клуга A.M., Цилькер Б.Я. Бортовое оборудование радиосистем ближней навигации. - М.: Транспорт, 1990, с.132). Устройство содержит: приемную антенну, делитель мощности, приемник дальномерных сигналов, приемник азимутальных сигналов, дешифратор дальномерных сигналов, формирователь азимутального импульса, дешифратор опорных сигналов, преобразователь посадочных сигналов, измеритель дальности, измеритель азимута, индикатор дальности и индикатор азимута.
Недостатком данного устройства является то, что оно может обеспечить квазиоптимальную обработку принимаемых сигналов (помехоустойчивость) при воздействии на него только стационарных шумовых и хаотических импульсных помех.
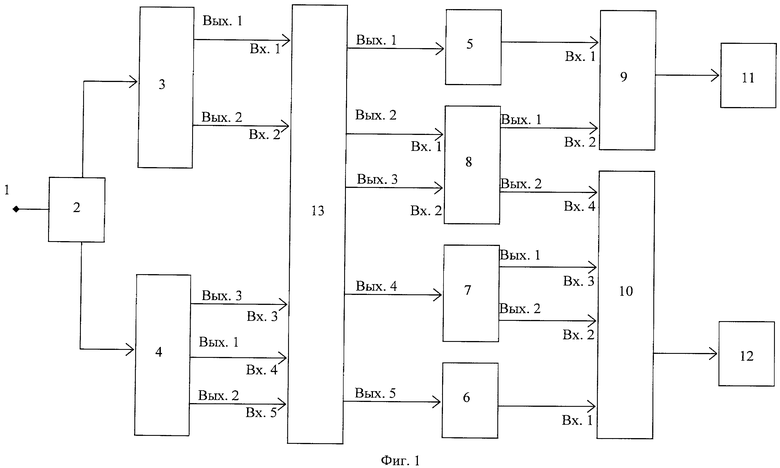
Прототипом изобретения по технической сущности является устройство помехоустойчивого приемника бортового оборудования радиотехнической системы ближней навигации и посадки, представленное на фиг.1 (Устройство помехоустойчивого приемника бортового оборудования радиотехнической системы ближней навигации и посадки. - Патент на полезную модель RU №87055, кл. Н04В 1/10, 20.09.2009 г.). Устройство содержит: приемную антенну (1), делитель мощности (2), приемник дальномерных сигналов (3), приемник азимутальных сигналов (4), дешифратор дальномерных сигналов (5), формирователь азимутального импульса (6), дешифратор опорных сигналов (7), преобразователь посадочных сигналов (8), измеритель дальности (9), измеритель азимута (10), индикатор дальности (11), индикатор азимута (12) и субмодуль цифровой обработки сигналов (ЦОС) (13).
Устройство работает следующим образом. Принятый приемной апертурой антенны (1) входной сигнал, представляющий смесь сигналов ответа дальности, азимута, курса, глиссады и опорных сигналов серий «35» и «36», через делитель мощности (2) подается на два приемника: дальномерных (3) и азимутальных (4) сигналов.
Сигналы ответа дальности и глиссады усиливаются и детектируются в приемнике дальномерных сигналов (3), при этом на его широкополосном выходе 1 выделяются ответные сигналы дальности, а узкополосный сигнал глиссады - на выходе 2 приемника. Ответные сигналы дальности и сигнал глиссады поступают на вход 1 и вход 2 соответственно субмодуля ЦОС (13), функционирующего на основе адаптивных алгоритмов фильтрации широкополосных и узкополосных сигналов, и осуществляющего аналогово-цифровую обработку данных сигналов, их адаптивную фильтрацию с последующим цифроаналоговым преобразованием. Обработанные ответные сигналы дальности с выхода 1 данного субмодуля поступают на вход дешифратора дальномерных сигналов (5), где дешифрируются. Выделенные дешифратором дальномерных сигналов (5) импульсы ответа дальности поступают на вход 1 измерителя дальности (9), в котором по интервалу времени между запросными и ответными сигналами с учетом постоянной времени задержки определяется наклонная дальность. Обработанный сигнал глиссады с выхода 2 субмодуля ЦОС (13) поступает на вход 1 преобразователя посадочных сигналов (8), функционирующего на основе принципа создания равносигнальных направлений (глиссады и курса), где преобразуются в разностное напряжение, пропорциональное отклонению от равносигнального направления глиссады, и с выхода 1 подается на вход 2 измерителя дальности (9). С выхода измерителя дальности значения измеренной дальности и отклонения от глиссады поступают на индикатор дальности (11), где отображаются.
Сигналы азимута, курса и опорные сигналы серий «35» и «36» усиливаются и детектируются в приемнике азимутальных сигналов (4). Опорные сигналы серий «35» и «36» выделяются на широкополосном выходе 1 приемника (4), а узкополосные сигналы азимута и курса - соответственно на выходах 2 и 3 приемника (4). Опорные сигналы серий «35» и «36» поступают на вход 4 субмодуля ЦОС (13), а сигналы азимута и курса соответственно на входы 5 и 3 данного субмодуля. Обработанные опорные сигналы серий «35» и «36» с выхода 4 субмодуля ЦОС (13) поступают на вход дешифратора опорных сигналов (7), а сигнал азимута с выхода 5 данного субмодуля на вход формирователя азимутального импульса (6). Дешифрированные опорные импульсы серий «35» и «36» с выходов 1 и 2 соответственно дешифратора (7) и азимутальный импульс с выхода формирователя азимутального импульса (6) подаются на входы 2, 3 и 1 соответственно измерителя азимута (10), в котором по взаимной временной расстановке опорных сигналов и азимутального импульса определяется значение азимута. Обработанный сигнал курса с выхода 3 субмодуля ЦОС (13) поступает на вход 2 преобразователя посадочных сигналов (8), где преобразуется в разностное напряжение, пропорциональное отклонению от равносигнального направления курса, и с выхода 2 подается на вход 4 измерителя азимута (10). С выхода измерителя азимута значения измеренного азимута и отклонения от курса поступают на индикатор азимута (12), где отображаются.
Недостатком данного устройства является то, что, несмотря на то, что оно может обеспечить квазиоптимальную обработку принимаемых сигналов в условиях воздействия на приемник БО РСБН нестационарных шумовых помех при наличии априорной неопределенности относительно свойств сигналов и помех за счет их адаптивной обработки. Однако интенсивное освоение радиочастотного диапазона, в котором функционирует БО РСБН, например, сетью системы подвижной радиосвязи (СПР) приводит к тому, что существует такое положение (положения) летательного аппарата (ЛА) (высота полета и удаление от наземных радиомаяков) в зоне действия РСБН (даже при наличии адаптивной обработки сигналов и помех в приемнике БО РСБН), при котором достигается минимальное отношение уровня полезного сигнала к уровню непреднамеренных помех, называемое «контрольной» точкой. Это приводит к снижению мощности принимаемых сигналов (вплоть до пропадания) при одновременном увеличении относительного и абсолютного уровней принимаемых активных и пассивных помех и, как следствие, к существенному ухудшению суммарного отношения сигнал/помеха + шум в приемнике БО РСБН и снижению ЭМС БО РСБН с наземными радиоэлектронными средствами (РЭС) и, как следствие, к резкому снижению точности оценки навигационных параметров.
Задачей изобретения является повышение помехозащищенности бортового приемника (БП) РСБН, работающего в режиме приема сигналов дальности, глиссады, азимута, курса и опорных сигналов серий «35» и «36», а также его ЭМС с наземными РЭС в условиях наличия нестационарного суммарного помехового поля на его входе при априорной неопределенности относительно свойств сигналов и помех в интересах улучшения качества (точности) определения навигационных параметров.
Техническим результатом, обеспечивающим решение указанной задачи, является повышение помехозащищенности и ЭМС БП РСБН, достигаемое применением методов, реализующих алгоритмы определения координат «контрольных» (наихудших) точек, где на входе БП РСБН достигается минимальное отношение уровня полезного сигнала к уровню непреднамеренных помех, и условий беспомехового функционирования РЭС в режиме приема сигналов дальности, глиссады, азимута, курса и опорных сигналов серий «35» и «36», позволяющих осуществлять определение координат «контрольных» точек, значений отношения сигнал/помеха в них и сравнение полученных значений с защитным отношением приемника, представляющим собой минимальное допустимое отношение мощности сигнала к мощности помехи на входе БП РСБН, обеспечивающее требуемое качество его функционирования в условиях воздействия непреднамеренных помех. Превышение отношения сигнал/помеха над защитным отношением (или их равенство) в «контрольных» точках свидетельствует об ЭМС РЭС, а в случае невыполнения этого критерия (условия) разрабатываются (предлагаются) рекомендации по обеспечению ЭМС (экипажу - отображаются данные «контрольные» точки (их координаты) на индикаторах ЛА; наземным службам РСБН и операторам СПР, например, по частотному разносу между частотно-кодовыми каналами РЭС РСБН и частотами РЭС сети СПР, введением ограничений на максимальную эквивалентную изотропно излучаемую мощность базовыми станциями сети СПР и т.д.).
Указанная задача и достижение заявленного технического результата достигаются тем, что согласно изобретению в предлагаемом помехоустойчивом БП РСБН дополнительно вводится субмодуль оценки ЭМС БП с наземными РЭС на базе цифровых программируемых процессоров (Корнеев В.В., Киселев А.В. Современные микропроцессоры. - М.: Нолидж, 2000 г.), функционирующий на основе алгоритмов, приведенных, например, в (Миханов Н.П., Ягольников С.В. Методика оценки ЭМС БО РСБН и РЭС сотовых систем сухопутной подвижной радиосвязи общего пользования федерального стандарта GSM - 900. - Радиотехника, 2004, №5, с.43-49) и осуществляющий аналогово-цифровую обработку сигналов дальности, глиссады, азимута, курса и опорных сигналов серий «35» и «36», определение для данных сигналов (каналов) координат «контрольных» точек, значений отношения сигнал/помеха в них и сравнение полученных значений с защитным отношением приемника с последующим цифроаналоговым преобразованием (Борисов Ю.В. Первая отечественная система непрерывного контроля с быстродействующим ЦАП/АЦП 600 Мвыборок/с по двум квадратурным каналам.- Электроника: наука, технология, бизнес, 2004, №2).
На фиг.2 представлена схема предлагаемого помехоустойчивого БП РСБН. Данный помехоустойчивый БП РСБН содержит: приемную антенну (1), делитель мощности (2), приемник дальномерных сигналов (3), приемник азимутальных сигналов (4), дешифратор дальномерных сигналов (5), формирователь азимутального импульса (6), дешифратор опорных сигналов (7), преобразователь посадочных сигналов (8), измеритель дальности (9), измеритель азимута (10), индикатор дальности (11), индикатор азимута (12), субмодуль ЦОС (13) и субмодуль оценки ЭМС БП с наземными РЭС (14).
Предлагаемый помехоустойчивый БП РСБН работает следующим образом. Принятый приемной апертурой антенны (1) входной сигнал, представляющий смесь сигналов ответа дальности, азимута, курса, глиссады и опорных сигналов серий «35» и «36», через делитель мощности (2) подается на два приемника: дальномерных (3) и азимутальных (4) сигналов.
Сигналы ответа дальности и глиссады усиливаются и детектируются в приемнике дальномерных сигналов (3), при этом на его широкополосном выходе 1 выделяются ответные сигналы дальности, а узкополосный сигнал глиссады - на выходе 2 приемника. Ответные сигналы дальности и сигнал глиссады поступают на вход 1 и вход 2 соответственно субмодуля ЦОС (13) на базе цифровых программируемых процессоров, функционирующего на основе адаптивных алгоритмов фильтрации широкополосных и узкополосных сигналов и осуществляющего аналогово-цифровую обработку данных сигналов, их адаптивную фильтрацию с последующим цифроаналоговым преобразованием. Обработанные ответные сигналы дальности с выхода 1 данного субмодуля поступают на вход дешифратора дальномерных сигналов (5), где дешифрируются. Выделенные дешифратором дальномерных сигналов (5) импульсы ответа дальности поступают на вход 1 измерителя дальности (9), в котором по интервалу времени между запросными и ответными сигналами с учетом постоянной времени задержки определяется наклонная дальность. Обработанный сигнал глиссады с выхода 2 субмодуля ЦОС (13) поступает на вход 1 преобразователя посадочных сигналов (8), функционирующего на основе принципа создания равносигнальных направлений (глиссады и курса), где преобразуются в разностное напряжение, пропорциональное отклонению от равносигнального направления глиссады и с выхода 1 подается на вход 2 измерителя дальности (9). С первого выхода измерителя дальности значения измеренной дальности и отклонения от глиссады поступают на первый вход индикатора дальности (11), где отображаются.
Со второго выхода измерителя дальности значения измеренной дальности и отклонения от глиссады поступают на первый вход субмодуля оценки ЭМС БП с наземными РЭС (14), аналогичного субмодулю, приведенному в (Занозин А.В., Миханов Н.П., Сай П.А. Повышение защищенности бортового приемника радиотехнической системы ближней навигации и посадки от помех подвижной радиосвязи стандарта GSM - 900. - Радиотехника, 2009, №1, с.113-116), на базе цифровых программируемых процессоров (Корнеев В.В., Киселев А.В. Современные микропроцессоры. - М.: Нолидж, 2000 г.), функционирующего на основе алгоритмов, приведенных, например, в (Миханов Н.П., Ягольников С.В. Методика оценки ЭМС БО РСБН и РЭС сотовых систем сухопутной подвижной радиосвязи общего пользования федерального стандарта GSM - 900. - Радиотехника, 2004, №5, с.43-49) и осуществляющего аналогово-цифровую обработку сигналов дальности и глиссады, определение координат «контрольных» точек для данных сигналов (каналов), значений отношения сигнал/помеха в них и сравнение полученных значений с защитным отношением приемника с последующим цифроаналоговым преобразованием (Борисов Ю.В. Первая отечественная система непрерывного контроля с быстродействующим ЦАП/АЦП 600 Мвыборок/с по двум квадратурным каналам.- Электроника: наука, технология, бизнес, 2004, №21). С первого выхода субмодуля оценки ЭМС БП с наземными РЭС координаты тех «контрольных» точек сигналов дальности и глиссады, в которых не выполняется условие ЭМС, поступают на второй вход индикатора дальности (11), где отображаются.
Сигналы азимута, курса и опорные сигналы серий «35» и «36» усиливаются и детектируются в приемнике азимутальных сигналов (4). Опорные сигналы серий «35» и «36» выделяются на широкополосном выходе 1 приемника (4), а узкополосные сигналы азимута и курса - соответственно на выходах 2 и 3 приемника (4). Опорные сигналы серий «35» и «36» поступают на вход 4 субмодуля. ЦОС (13), а сигналы азимута и курса соответственно на входы 5 и 3 данного субмодуля. Обработанные опорные сигналы серий «35» и «36» с выхода 4 субмодуля ЦОС (13) поступают на вход дешифратора опорных сигналов (7), а сигнал азимута с выхода 5 данного субмодуля на вход формирователя азимутального импульса (6). Дешифрированные опорные импульсы серий «35» и «36» с выходов 1 и 2 соответственно дешифратора (7) и азимутальный импульс с выхода формирователя азимутального импульса (6) подаются на входы 2, 3 и 1 соответственно измерителя азимута (10), в котором по взаимной временной расстановке опорных сигналов и азимутального импульса определяется значение азимута. Обработанный сигнал курса с выхода 3 субмодуля ЦОС (13) поступает на вход 2 преобразователя посадочных сигналов (8), где преобразуется в разностное напряжение, пропорциональное отклонению от равносигнального направления курса, и с выхода 2 подается на вход 4 измерителя азимута (10). Со второго выхода измерителя азимута значения измеренного азимута и отклонения от курса поступают на второй вход индикатора азимута (12), где отображаются.
С первого выхода измерителя азимута значения измеренного азимута и отклонения от курса, а также опорные сигналы серий «35» и «36» поступают на второй вход субмодуля оценки ЭМС БП с наземными РЭС (14), аналогичного субмодулю, приведенному в (Занозин А.В., Миханов Н.П., Сай П.А. Повышение защищенности бортового приемника радиотехнической системы ближней навигации и посадки от помех подвижной радиосвязи стандарта GSM - 900. - Радиотехника, 2009, №1, с.113-116), на базе цифровых программируемых процессоров (Корнеев В.В., Киселев А.В. Современные микропроцессоры. - М.: Нолидж, 2000 г.), функционирующего на основе алгоритмов, приведенных, например, в (Миханов Н.П., Ягольников С.В. - Методика оценки ЭМС БО РСБН и РЭС сотовых систем сухопутной подвижной радиосвязи общего пользования федерального стандарта GSM - 900. - Радиотехника, 2004, №5, с.43-49) и осуществляющего аналогово-цифровую обработку сигналов азимута, курса и опорных сигналов серий «35» и «36», определение координат «контрольных» точек для данных сигналов (каналов), значений отношения сигнал/помеха в них и сравнение полученных значений с защитным отношением приемника с последующим цифроаналоговым преобразованием (Борисов Ю.В. Первая отечественная система непрерывного контроля с быстродействующим ЦАП/АЦП 600 Мвыборок/с по двум квадратурным каналам.- Электроника: наука, технология, бизнес, 2004, №2). Со второго выхода субмодуля оценки ЭМС БП с наземными РЭС координаты тех «контрольных» точек сигналов азимута, курса и опорных сигналов серий «35» и «36», в которых не выполняется условие ЭМС, поступают на первый вход индикатора азимута (12), где отображаются.
Сравнительная оценка эффективности предлагаемого помехоустойчивого БП РСБН и устройства прототипа проведена по методике, изложенной в (Миханов Н.П., Ягольников С.В. Методика оценки ЭМС БО РСБН и РЭС сотовых систем сухопутной подвижной радиосвязи общего пользования федерального стандарта GSM - 900. - Радиотехника, 2004, №5, с.43-49). В качестве критерия (условия) обеспечения защищенности от помех (ЭМС) принималось отношение мощности полезного сигнала к мощности помехи не меньшее защитного отношения БП РСБН, представляющего собой минимальное допустимое отношение мощности сигнала к мощности помехи на входе БП РСБН, обеспечивающее требуемое качество его функционирования (определения навигационных параметров) в условиях воздействия непреднамеренных помех, достигаемое при использовании предлагаемого помехоустойчивого БП РСБН вместо устройства прототипа. Для принятия решения о совместимости БО РСБН с наземными РЭС достаточно провести проверку условия обеспечения ЭМС в «контрольной» (наихудшей) точке, где на входе БП РСБН достигается минимальное отношение уровня полезного сигнала к уровню непреднамеренных помех. Очевидно, что выполнение условия ЭМС в «контрольной» точке гарантирует его выполнение во всех остальных точках.
В зависимости от режима работы системы РСБН/посадочная радиомаячная группа (ПРМГ) (зона действия радиомаяков круговая или секторная) и типа РЭС СПР (подвижная абонентская станция (АС) или стационарная базовая станция (БС)) определение координат "контрольных" точек (КТ) для соответствующих рабочих каналов РСБН и вариантов помеховых ситуаций сводится к решению следующих четырех задач:
1) определение координат КТ для случая воздействия сигнала АС на БО РСБН, работающее в режиме приема сигналов в каналах азимута и опорных сигналов "35", "36" (режим "навигация");
2) определение координат КТ для случая воздействия сигнала БС на БО РСБН, работающее в режиме приема сигналов в каналах дальности (РСБН, режим "навигация"; ПРМГ, режим "посадка");
3) определение координат КТ для случая воздействия сигнала АС на БО РСБН, работающее в режиме приема сигналов в канале курса (режим "посадка");
4) определение координат КТ для случая воздействия сигнала БС на БО РСБН, работающее в режиме приема сигналов в канале глиссады (режим "посадка").
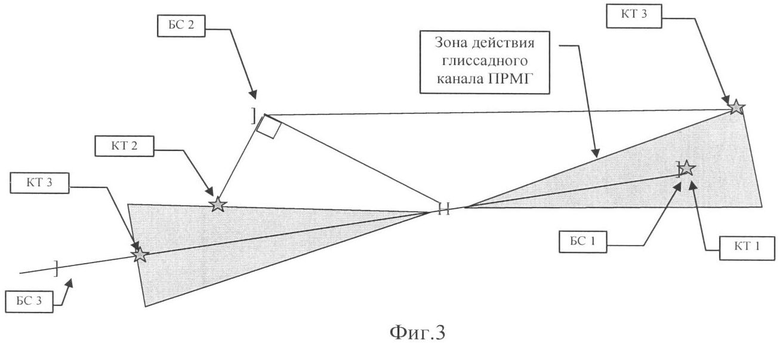
На фиг.3 приведены возможные положения КТ для случая воздействия БС сети СПР стандарта GSM - 900 на глиссадный канал предлагаемого помехоустойчивого приемника БО РСБН ЛА, работающего в режиме приема сигналов глиссадного радиомаяка ПРМГ (режим «посадка»).
Анализ приведенных на фиг.3 результатов позволяет сделать вывод о том, что для рассматриваемого случая возможны следующие положения КТ, где может не выполняться условие обеспечения ЭМС:
1) КТ 1 - ЛА осуществляет посадку в рабочем секторе глиссадного радиомаяка ПРМГ по линии, проходящей через БС, если азимут БС относительно радиомаяка находится в его рабочем секторе;
2) КТ 2 - ЛА осуществляет посадку в рабочем секторе глиссадного радиомаяка ПРМГ по ближней к БС его «боковой» границе, если БС расположена вне сектора посадки и перпендикуляр к линии БС - ПРМГ, проходящий через точку размещения БС, пересекает ближнюю «боковую» границу сектора посадки;
3) КТ 3 - в остальных случаях ЛА находится в одной из двух точек пересечения «боковых» границ и дальней границы рабочего сектора глиссадного радиомаяка ПРМГ, расстояние от которой до БС минимально.
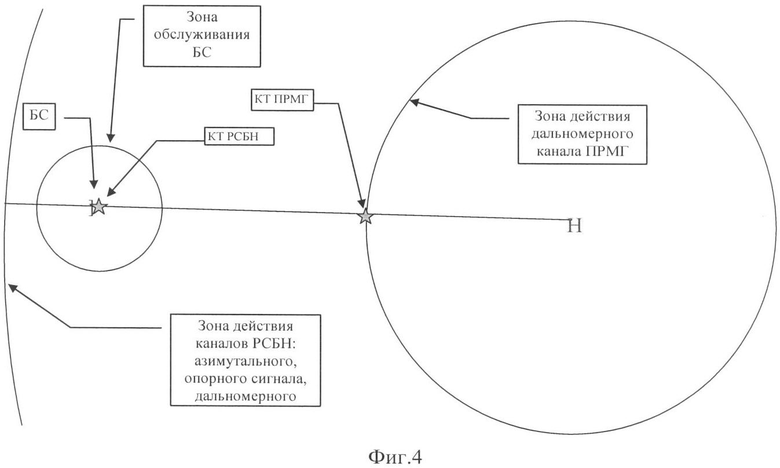
На фиг.4 приведены возможные положения КТ для случая воздействия сигнала БС сети СПР стандарта GSM - 900 на дальностный канал предлагаемого помехоустойчивого приемника БО РСБН ЛА, работающего в режиме приема сигналов дальности (РСБН, режим "навигация"; ПРМГ, режим "посадка").
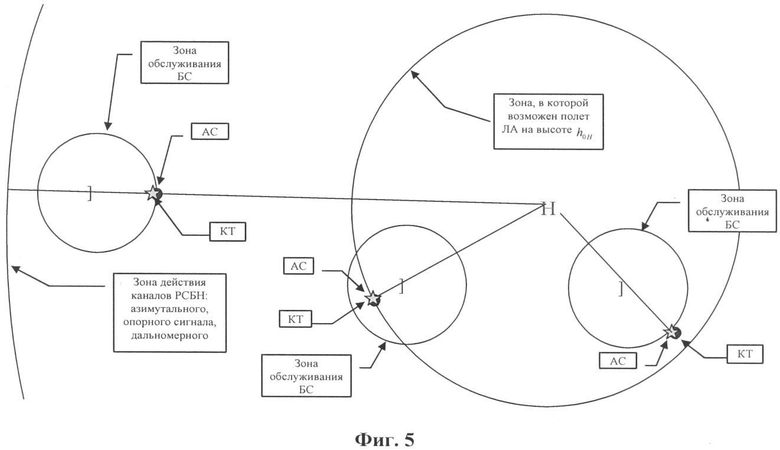
На фиг.5 приведены возможные положения КТ для случая воздействия сигнала АС сети СПР стандарта GSM - 900 на каналы азимута и опорных сигналов серий "35" и "36" предлагаемого помехоустойчивого БП РСБН ЛА, работающего в режиме приема сигналов азимута и опорных сигналов серий "35" и "36" (режим «навигация»).
Анализ приведенных на фиг.5 результатов позволяет сделать вывод о том, что для рассматриваемого случая возможны следующие положения КТ, где может не выполняться условие обеспечения ЭМС: при размещении АС на пересечении границы зоны обслуживания БС и линии, проходящей через точки стояния БС и радиомаяка; при нахождении ЛА либо над АС, если зоны действия РСБН и обслуживания БС перекрываются, либо на пересечении границы зоны действия РСБН и линии, проходящей через точки стояния БС и радиомаяка.
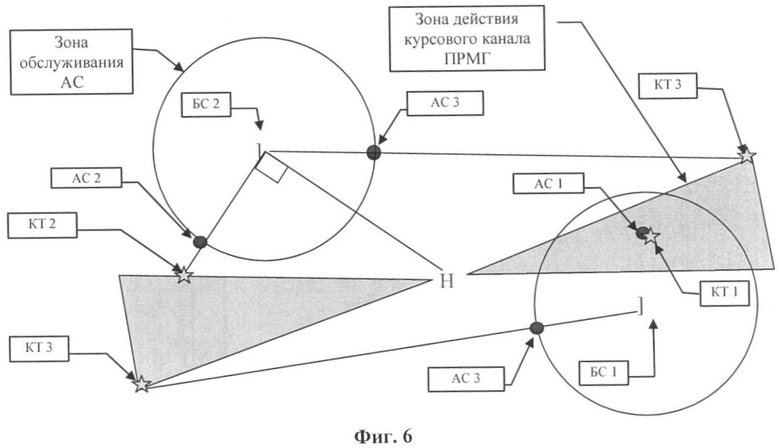
На фиг.6 приведены возможные положения КТ для случая воздействия сигнала АС сети СПР стандарта GSM - 900 на курсовой канал предлагаемого помехоустойчивого БП РСБН ЛА, работающего в режиме приема сигналов курса (режим "посадка").
Анализ приведенных на фиг.6 результатов позволяет сделать вывод о том, что для рассматриваемого случая возможны следующие положения КТ, где может не выполняться условие обеспечения ЭМС:
1) КТ1 - ЛА осуществляет посадку по линии, проходящей через БС или по ближней к ней «боковой» границе сектора посадки, если имеет место пересечение зоны обслуживания БС и коридора посадки, а АС находится непосредственно под ЛА;
2) КТ2 - ЛА осуществляет посадку по ближней к БС "боковой" границе сектора посадки, если зона обслуживания БС и сектор посадки не пересекаются и перпендикуляр к линии БС - радиомаяк ПРМГ, проходящий через точку размещения БС, пересекает ближнюю "боковую" границу сектора посадки, а АС находится в точке пересечения этого перпендикуляра и границы зоны обслуживания БС;
3) КТ3 - в остальных случаях ЛА находится в одной из двух точек пересечения "боковых" границ и дальней границы сектора посадки, расстояние от которой до БС минимально, а АС находится в точке пересечения зоны обслуживания БС и линии, проходящей через БС и ЛА.
Анализ приведенных результатов позволяет сделать вывод о том, что применение предложенных мер помехозащищенности и оценки ЭМС в предлагаемом помехоустойчивом БП РСБН по сравнению с устройством-прототипом позволит осуществить определение координат «контрольных» точек, в которых не обеспечивается требуемое качество функционирования БО РСБН в условиях воздействия непреднамеренных помех, отобразить их на индикаторах ЛА и, как следствие, например, избежать нахождения в них ЛА, что не приведет к снижению качества (точности) определения навигационных параметров. В (Занозин А.В., Миханов Н.П., Сай П.А. Повышение защищенности бортового приемника радиотехнической системы ближней навигации и посадки от помех подвижной радиосвязи стандарта GSM - 900. - Радиотехника, 2009, №1, с.113-116) показано, что применение предложенных мер позволит обеспечить в реальных условиях работы передатчиков СПР межсистемную ЭМС с БП РСБН и его помехозащищенность, на 9 - 20 дБ уменьшить требуемое отношение сигнал/помеха в каналах дальности, глиссады, азимута, курса и опорных сигналов серий «35» и «36», обеспечивающее заданное качество (точность) определения навигационных параметров, что обеспечит прирост совокупного объема радиочастотного ресурса, доступного РСБН и СПР стандарта GSM - 900, от 10 до 40% в зависимости от региона.
Предлагаемое устройство не требует существенной конструкционной доработки известного устройства и может быть внедрено в существующих БП РСБН.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЕСПЕЧЕНИЯ ЭЛЕКТРОМАГНИТНОЙ СОВМЕСТИМОСТИ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОЙ СИСТЕМЫ БЛИЖНЕЙ НАВИГАЦИИ И СИСТЕМЫ ПОДВИЖНОЙ РАДИОСВЯЗИ | 2010 |
|
RU2433540C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИНФОРМАТИВНЫХ ПАРАМЕТРОВ И ХАРАКТЕРИСТИК РАДИОСИГНАЛОВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2267862C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНФОРМАТИВНЫХ ПАРАМЕТРОВ И ХАРАКТЕРИСТИК РАДИОСИГНАЛОВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2251803C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЭЛЕКТРОМАГНИТНОЙ СОВМЕСТИМОСТИ СИСТЕМЫ СВЯЗИ | 2004 |
|
RU2271067C1 |
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |
| Ретранслятор дальномера посадочной радиомаячной группы | 2021 |
|
RU2776028C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2282868C1 |
| Посадочная радиомаячная группа дециметрового диапазона длин волн | 2022 |
|
RU2801583C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2004 |
|
RU2282869C1 |
| Ретранслятор дальномера посадочной радиомаячной группы с каналом передачи данных | 2022 |
|
RU2786058C1 |
Изобретение относится к области радиотехники и может использоваться в помехоустойчивом бортовом приемнике радиотехнической системы ближней навигации. Достигаемый технический результат - повышение помехозащищенности и электромагнитной совместимости бортового приемника радиотехнической системы ближней навигации с наземными радиоэлектронными средствами и повышение точности определения навигационных параметров. Устройство содержит приемную антенну, делитель мощности, приемник дальномерных сигналов, приемник азимутальных сигналов, субмодуль цифровой обработки сигналов, дешифратор дальномерных сигналов, формирователь азимутального импульса, дешифратор опорных сигналов, преобразователь посадочных сигналов, измеритель азимута, индикатор азимута, измеритель дальности, индикатор дальности, субмодуль оценки электромагнитной совместимости бортового приемника с наземными радиоэлектронными средствами. 6 ил.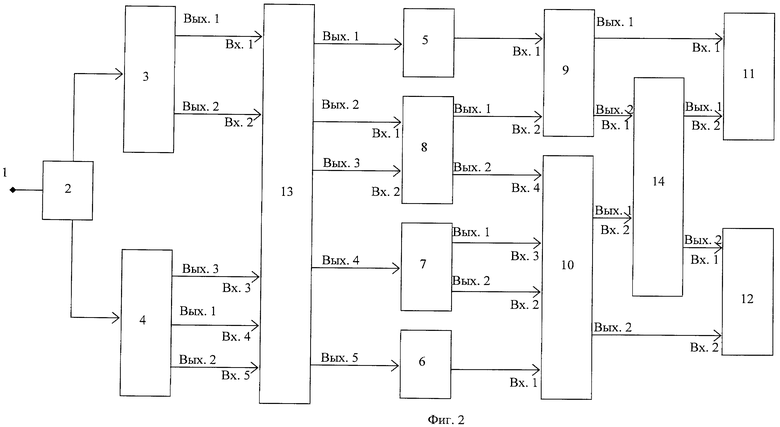
Помехоустойчивый бортовой приемник радиотехнической системы ближней навигации, содержащий приемную антенну, связанную с делителем мощности, первый выход которого является входом приемника дальномерных сигналов, который своим первым выходом соединен с первым входом, а вторым выходом - со вторым входом субмодуля цифровой обработки сигналов, а второй выход делителя мощности является входом приемника азимутальных сигналов, который своим первым выходом соединен с четвертым входом, вторым выходом - с пятым входом, а третьим выходом - с третьим входом субмодуля цифровой обработки сигналов, первый выход которого является входом дешифратора дальномерных сигналов, связанного своим выходом с первым входом измерителя дальности, а вторым выходом субмодуль цифровой обработки сигналов соединен с первым входом, а третьим выходом - со вторым входом преобразователя посадочных сигналов, второй выход которого является четвертым входом измерителя азимута, а первым выходом преобразователь посадочных сигналов соединен со вторым входом измерителя дальности, а четвертым выходом субмодуль цифровой обработки сигналов соединен с дешифратором опорных сигналов, который своим первым выходом соединен с третьим входом, а вторым выходом - со вторым входом измерителя азимута, а пятым выходом субмодуль цифровой обработки сигналов соединен с формирователем азимутального импульса, выход которого является первым входом измерителя азимута, а также индикаторы дальности и азимута, отличающийся тем, что измеритель дальности своим первым выходом соединен с первым входом индикатора дальности, а вторым выходом - с первым входом субмодуля оценки электромагнитной совместимости бортового приемника с наземными радиоэлектронными средствами, с первого выхода которого сигналы, соответствующие координатам контрольных точек сигналов дальности и глиссады, в которых не выполняется условие электромагнитной совместимости, поступают на второй вход индикатора дальности, а измеритель азимута своим вторым выходом соединен со вторым входом индикатора азимута, а первым выходом - со вторым входом субмодуля оценки электромагнитной совместимости бортового приемника с наземными радиоэлектронными средствами, со второго выхода которого сигналы, соответствующие координатам контрольных точек сигналов азимута, курса и опорных сигналов серий «35» и «36», в которых не выполняется условие электромагнитной совместимости, поступают на первый вход индикатора азимута.
| Сборный железобетонный мост малого пролета | 1949 |
|
SU87055A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2230294C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ И ПОСАДКИ | 2002 |
|
RU2236020C2 |
| US 5017930, 21.05.1991 | |||
| Ж | |||
| Радиотехника, 2004, №5, c.43-48. | |||

