Изобретение относится к области посадки летательных аппаратов (ЛА) на основе спутниковых радионавигационных систем (СРНС) ГЛОНАСС, GPS, GNSS и может найти применение для оснащения необорудованных радиомаячными посадочными средствами аэродромов и вертолетных площадок.
Для осуществления захода на посадку и посадки ЛА требуются высокие точности местоопределения (МО), особенно по вертикальной составляющей - по высоте. СРНС в стандартном режиме таких точностей не обеспечивает.
Одним из путей обеспечения высокоточных МО по СРНС в локальных районах является применение совместно с навигационной информацией, поступающей от навигационных искусственных спутников Земли (НИСЗ) систем GPS и/или ГЛОНАСС, корректирующей информации (КИ), вырабатываемой на локальной контрольно-корректирующей станции (ЛККС).
Для передачи КИ могут быть использованы либо специальные каналы связи, либо радиоканалы, примененные в существующих спутниковых радионавигационных системах захода на посадку и посадки. Первый вариант канала связи описан в патенте [1], второй - в патенте [2] и в монографии [3].
Использование корректирующей информации при навигационных определениях по СРНС позволяет существенно снизить систематические составляющие погрешностей МО; для уменьшения шумовой составляющей погрешности МО одним из возможных путей является использование дополнительных навигационных точек, улучшающих геометрические свойства рабочих созвездий НИСЗ.
В патенте [1] предложена высокоточная система МО, содержащая N навигационных искусственных спутников Земли, наземную аппаратуру в виде контрольно-корректирующей станции (ККС), состоящей из антенны, принимающей радионавигационные сигналы от N НИСЗ, находящихся в зоне радиовидимости ККС, поступающие на вход приемного устройства, выход которого соединен со входом вычислителя измеряемых параметров, а выход вычислителя измеряемых параметров соединен со входом вычислителя дифференциальных поправок; устройство передачи поправок, включающее опорный генератор, выход которого соединен с первым входом передатчика, на второй вход которого, также как и на вход вычислителя поправок, поступают сигналы координат ККС, на третий вход передатчика поступают сигналы корректирующей информации, а с выхода передатчика сигналы ККС через передающую антенну поступают на приемную антенну и далее на приемник бортовой аппаратуры ЛА, которая обеспечивает прием и обработку сигналов НИСЗ и КИ и формирует данные о координатах ЛА. Недостатком аналога являются наличие специального канала передачи КИ и отсутствие возможности улучшения геометрических параметров рабочего созвездия НИСЗ, которые определяют точность вычисления координат ЛА.
Высокоточная система МО [2] отличается от предыдущего аналога в части реализации устройства передачи поправок. Такое устройство реализовано по принципу псевдоспутника (ПС); использованы широкополосные сигналы, аналогичные излучаемым с НИСЗ, закодированные, в том числе, корректирующей информацией. Частота излучения ПС смещена относительно частоты L1 СРНС GPS. Преимуществом аналога [2] по сравнению с [1] являются отсутствие дополнительного связного канала, идентичность антенн на ЛА для приема сигналов НИСЗ и ПС, общая СВЧ-часть приемника. Недостатками аналога являются отличие несущей частоты сигнала ПС от стандартной несущей частоты L1 сигналов GPS, что не позволяет использовать на ЛА стандартные бортовые приемники GPS, и отсутствие возможности оптимизации навигационных свойств рабочего созвездия, состоящего из НИСЗ и ПС.
СРНСП [3], как и система [2], построена по принципу системы с использованием псевдоспутника, но имеет дополнительное преимущество: навигационные сигналы ПС используются для получения дополнительной псевдодальности, что эквивалентно улучшению геометрических свойств рабочего созвездия. Кроме того, сигналы ПС идентичны сигналам НИСЗ.
СРНСП [3] является прототипом заявляемого изобретения.
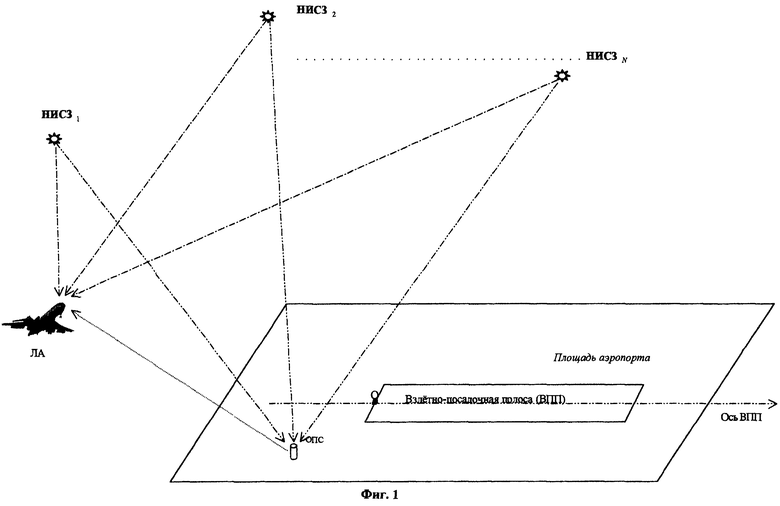
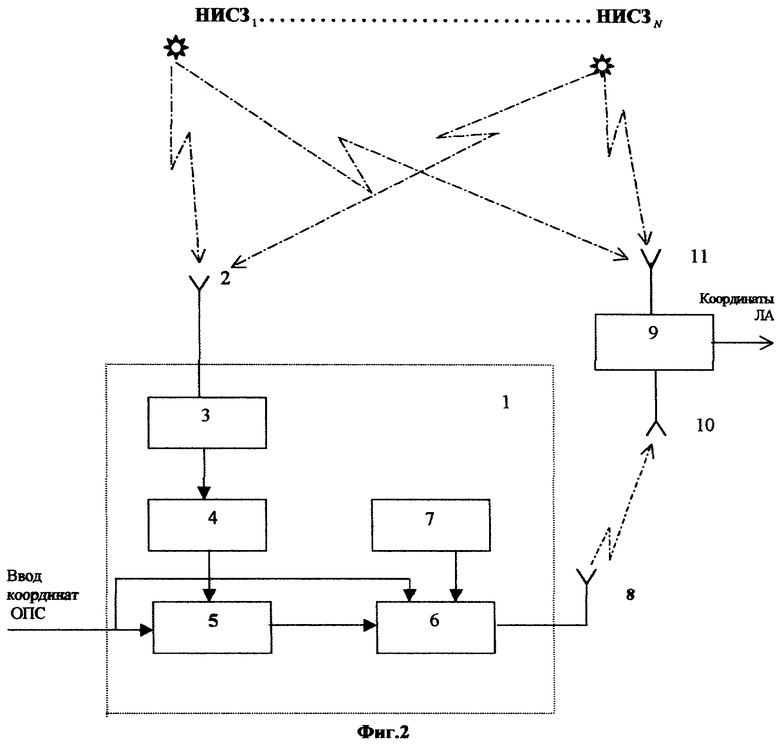
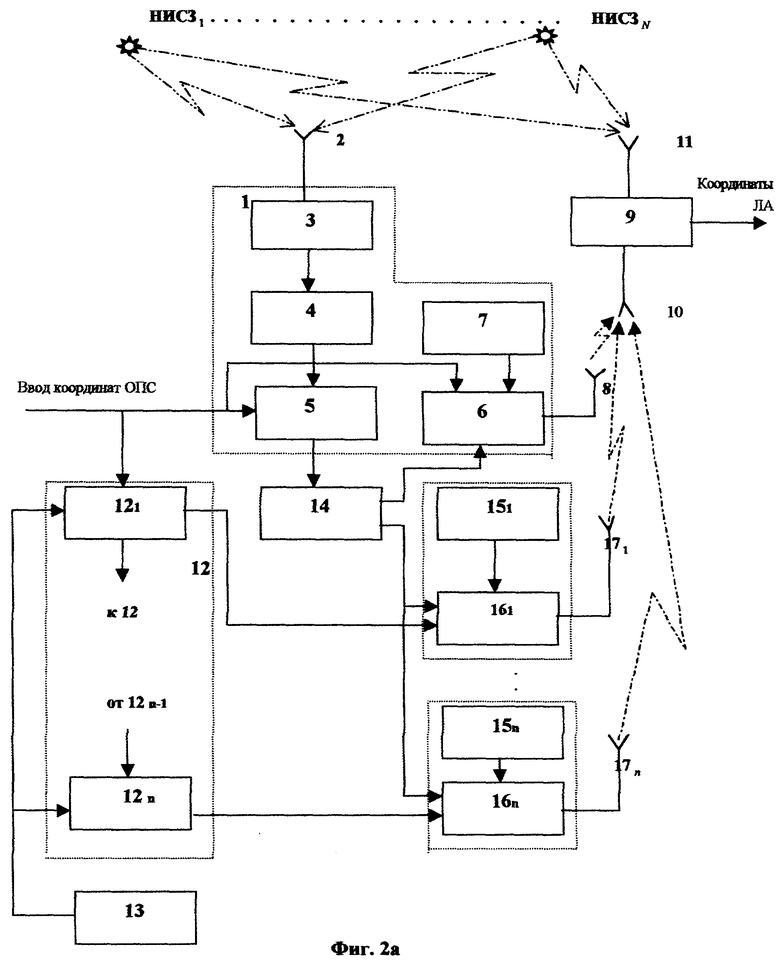
На фиг.1 представлена общая схема расположения СРНСП - прототипа в пространстве аэропорта; на фиг.2 - структурная схема его узлов по [3]. СРНСП содержит НИСЗ, формирующие рабочее созвездие, опорный псевдоспутник (ОПС) 1, расположенный у взлетно-посадочной полосы (ВПП) и состоящий из последовательно соединенных приемной антенны 2, наземного приемника 3, вычислителя измеряемых параметров 4 и вычислителя поправок 5, а также передатчика корректирующей информации 6, запускающий вход которого соединен с выходом опорного генератора 7, выход соединен с входом передающей антенны 8, установочный вход вычислителя 5 и второй информационный вход передатчика 6 служат для ввода координат ОПС, выход вычислителя 5 соединен с первым информационным входом передатчика 6, при этом последний связан информационной связью передача-прием с бортовым приемником ЛА 9 через антенны 8 и 10, а НИСЗ связан аналогичной связью с ЛА и ОПС через антенны 11 и 2 соответственно. Приемник 3 выполняет непрерывное слежение за сигналами спутников и вычисляет поправки для передачи на бортовой приемник 9. Псевдоспутник генерирует сигнал, синхронизированный по времени GPS и модулированный с учетом вычисленных поправок. Широкополосный бортовой приемник 9 на борту самолета отслеживает сигналы спутников и псевдоспутника, корректирует измерения псевдодальностей и фаз несущих при наличии КИ, передаваемой в составе информационного кадра навигационного сигнала псевдоспутника, и выполняет точное вычисление координат ЛА в трехмерном пространстве.
Однако данная система не обеспечивает достаточную точность измерений координат ЛА при пространственно-временных изменениях радионавигационного поля СРНС.
Задачей настоящего изобретения является повышение точности измерений радионавигационных параметров по СРНС, обеспечивающих возможность посадки ЛА на необорудованные аэродромы и посадочные площадки с точностью до 1 категории посадочного метеоминимума.
Поставленная задача решается следующим образом.
В спутниковой радионавигационной системе захода на посадку и посадки летательных аппаратов (ЛА), содержащей N навигационных искусственных спутников Земли (НИСЗ), формирующих рабочее созвездие, опорный псевдоспутник, расположенный у взлетно-посадочной полосы (ВПП) и состоящий из последовательно соединенных приемной антенны, наземного приемника, вычислителя измеряемых параметров и вычислителя поправок, а также передатчика корректирующей информации, запускающий вход которого соединен с выходом опорного генератора, выход соединен с входом передающей антенны, а установочный вход вычислителя поправок и второй информационный вход упомянутого передатчика корректирующей информации служат для ввода координат ОПС, каждый из упомянутых НИСЗ связан информационной связью передача-прием с ЛА и с опорным псевдоспутником, а передатчик корректирующей информации связан информационной связью передача-прием с ЛА, введены n дополнительных псевдоспутников (ДПС), размещенных в фиксированных точках у ВПП, вычислитель оптимальных координат псевдоспутников, блок информационных параметров аэропорта и распределительный узел с (n+1) выходами, причем каждый из введенных n ДПС содержит опорный генератор, выходом соединенный с запускающим входом передатчика, обеспечивающего через передающую антенну информационную связь передача-прием с ЛА, распределительный узел соединен входом с выходом вычислителя поправок, первым выходом соединен с первым информационным входом передатчика ОПС, а остальными n выходами соединен соответственно с первыми информационными входами передатчиков упомянутых n ДПС, вычислитель оптимальных координат псевдоспутников включает n вычислителей, соединенных между собой последовательно так, что первый выход предыдущего вычислителя соединен с первым входом последующего, вторые выходы вычислителей соединены соответственно со вторыми информационными входами передатчиков n ДПС, вторые входы упомянутых вычислителей соединены с выходом блока информационных параметров аэропорта, а первый вход первого вычислителя служит для ввода координат ОПС.
Кроме того, предлагается введение в ОПС вычислителя оптимальных координат опорного псевдоспутника, первый вход которого соединен с первым выходом n-го вычислителя, второй вход соединен с выходом блока информационных параметров аэропорта, первый выход соединен с первым входом первого введенного вычислителя, а второй его выход соединен с установочным входом вычислителя поправок.
Предлагается определять число введенных псевдоспутников n, длину вектора положения i-го псевдоспутника от точки пересечения оси ВПП с торцом ВПП Li, угол Аi между осью ВПП и упомянутым вектором положения Li из условий оптимизации и, соответственно, из следующих функционалов Ф1, Ф2, Ф3:


где m - число оптимизируемых по положению псевдоспутников,
F ∈ [ϕ впп, λ впп, hвпп, Аzвпп, ϕ k, λ k, hk, Limin, Limax, I (Н)],
ϕ впп, λ впп, hвпп - широта, долгота и высота середины торца ВПП, обозначенной на фиг.1 и 1а точкой О,
Azвпп - азимут осевой линии ВПП,
ϕ к, λ к, hk, - координаты к-й опорной точки эталонной глиссады, соответственно широта, долгота и высота,
Limin - минимально допустимое удаление i-го псевдоспутника от середины торца ВПП,
Limax - максимально допустимое удаление i-го псевдоспутника от середины торца ВПП,
I(H) - функционал качества,
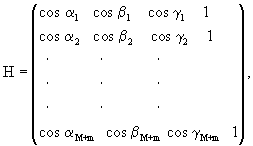
Н - матрица направляющих косинусов, определяемая уравнением
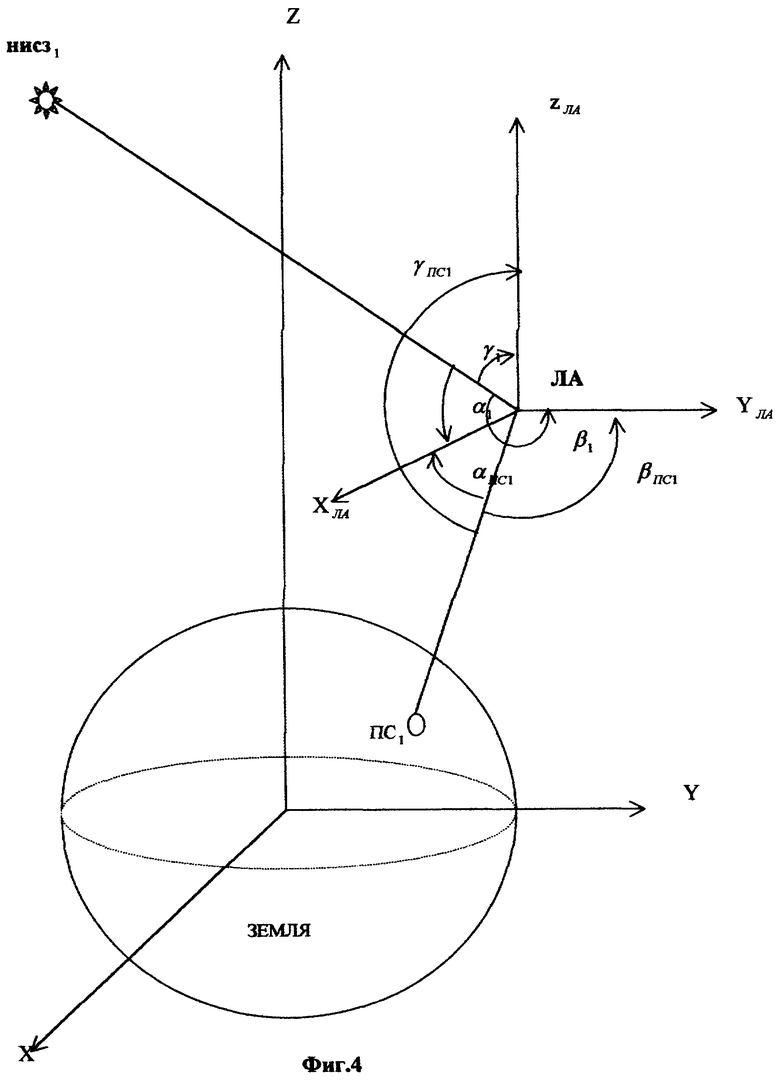
где cos α i, cos β i, cos γ i, i=1... М+m - направляющие косинусы векторов положений НИСЗ и псевдоспутников относительно ЛА в геоцентрической системе координат [3],

Предлагается также способ захода на посадку и посадки ЛА, в котором используют описанную выше спутниковую навигационную систему посадки с ОПС и n ДПС, определяют координаты ОПС по формирующим рабочее созвездие N НИСЗ, вычисляют расхождение между упомянутыми координатами ОПС и истинными координатами ОПС и по данному расхождению вычисляют массив поправок и составляют корректирующую информацию (КИ) для каждого из составляющих рабочее N НИСЗ, вычисляют оптимальные координаты n ДПС, размещают n ДПС в соответствии с оптимальными координатами, распределяют КИ между ОПС и каждым ДПС по заданному закону, модулируют навигационные сигналы ОПС и ДПС сигналами, соответствующими КИ для ОПС и каждого ДПС, транслируют модулированные навигационные сигналы каждым ДПС и ОПС на ЛА, причем при упомянутом вычислении оптимальных координат n ДПС предварительно определяют начальные условия в виде совокупности данных о расположении ВПП, опорных точках заданной глиссады, координатах ОПС и альманахе спутниковой навигационной системы, затем определяют начальную опорную точку заданной глиссады, вычисляют эффект от установки первого ДПС путем регулярного перебора возможных азимутов и удалений ДПС относительно опорной точки на ВПП, за которую принята, например, точка О - середина торца ВПП, присваивают вычисленные оптимальные координаты первому ДПС, после чего дополняют начальные условия оптимальными координатами ДПС и повторяют аналогичную последовательность действий для всех последующих ДПС.
В развитие упомянутого способа после определения оптимальных координат n ДПС вычисляют аналогичными действиями оптимальные координаты ОПС и размещают ОПС в соответствии с его оптимальными координатами.
Предлагается также вариант описанного выше способа, состоящий в том, что начальные условия дополняют значением заданной пороговой величины Λ 0 эффекта от установки ДПС, производят сравнение текущего эффекта Λ j установки для j-го ДПС путем сравнения его с заданной пороговой величиной и ограничивают число используемых ДПС, исходя из соотношения

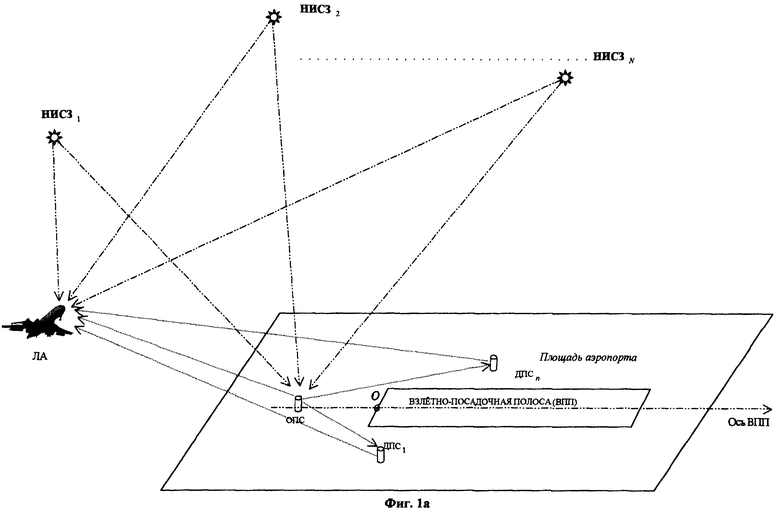
Заявляемая система посадки поясняется с помощью фиг.1a, 2a и 3.
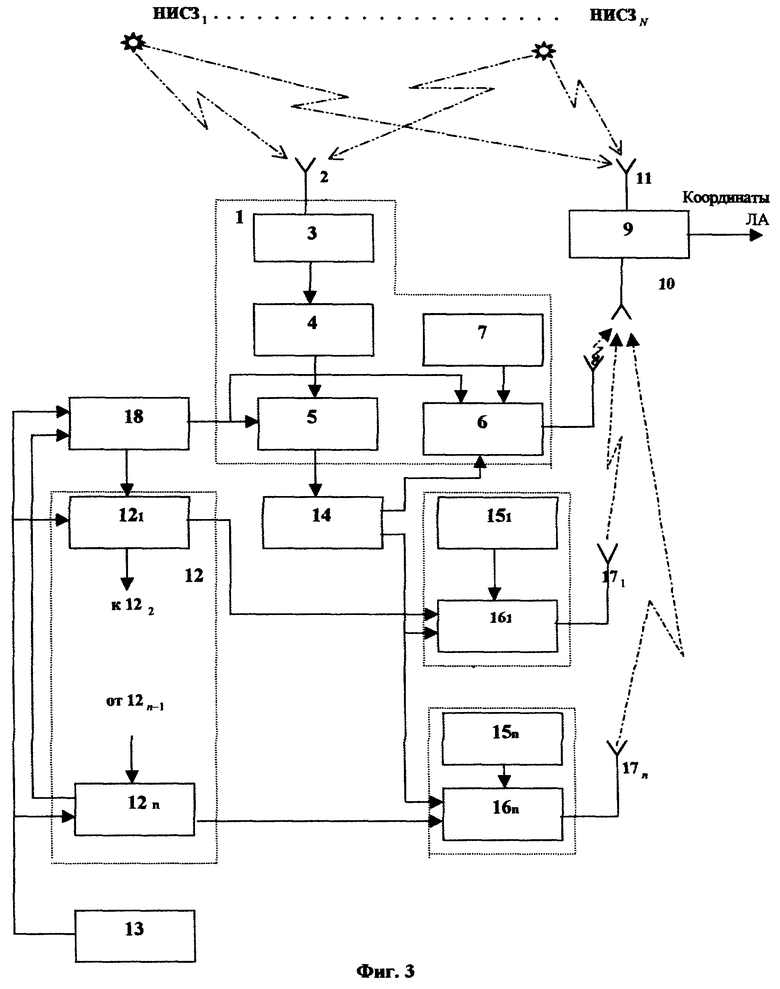
На фиг.1а представлена общая схема расположения СРНПС в пространстве аэропорта. На фиг.2а - структурная схема СРПНС с неоптимизированными координатами ОПС; на фиг.3 - структурная схема узлов СРНПС с оптимизированными координатами ОПС.
Заявляемая СРНПС (фиг.1а, 2а) содержит: N навигационных искусственных спутников Земли (НИСЗ), формирующих рабочее созвездие, ОПС 1, расположенный у ВПП и состоящий из последовательно соединенных приемной антенны 2, наземного приемника 3, вычислителя измеряемых параметров 4 и вычислителя поправок 5, а также передатчика корректирующей информации 6, запускающий вход которого соединен с выходом опорного генератора 7, выход соединен с входом передающей антенны 8, при этом на установочный вход вычислителя поправок и на второй информационный вход передатчика 6 вводятся координаты ОПС 1, каждый из упомянутых НИСЗ связан информационной связью передача-прием с бортовым приемником 9 ЛА и с опорным псевдоспутником 1, а передатчик корректирующей информации связан информационной связью передача-прием с бортовым приемником 9 через антенны 8 и 10, каждый из упомянутых НИСЗ связан информационной связью передача-прием с бортовым приемником 9 ЛА и с опорным ОПС 1 через антенны 11 и 2 (радиосвязи передача-прием обозначены пунктирными стрелками).
Введены (фиг.2а) n ДПС, размещенных в фиксированных точках у ВПП, вычислитель оптимальных координат псевдоспутников 12, блок информационных параметров аэропорта 13 и распределительный узел (РУ) 14 с (n+1) выходами, при этом каждый из введенных n ДПС содержит опорный генератор 151...n, выходом соединенный с входом передатчика 161...n, обеспечивающего через передающую антенну 171...n, информационную связь передача-прием с ЛА, распределительный узея 14 соединен входом с выходом вычислителя поправок 5, первым выходом соединен с первым информационным входом передатчика 6 ОПС, а остальными n выходами соединен соответственно с первыми информационными входами передатчиков 161...n, упомянутых n ДПС; вычислитель оптимальных координат псевдоспутников включает n вычислителей 121...n, соединенных между собой последовательно так, что первый выход предыдущего вычислителя соединен с первым входом последующего, вторые выходы вычислителей соединены соответственно со вторыми информационными входами передатчиков n ДПС 161...n, вторые входы упомянутых вычислителей соединены с выходом блока информационных параметров аэропорта 13, а первый вход первого вычислителя 121 служит для ввода координат ОПС.
В другом варианте СРНПС (фиг.3) введен вычислитель оптимальных координат ОПС 18, первый вход которого соединен с первым выходом n-го вычислителя 12n, второй вход соединен с выходом блока информационных параметров аэропорта 13, первый выход соединен с первым входом первого введенного вычислителя 121, а второй его выход соединен с установочным входом вычислителя поправок 5.
СРНПС на фиг.2а предполагает наперед заданные не оптимизированные координаты ОПС. Данный СРНПС работает следующим образом.
Наземный приемник 3 ОПС 1 и бортовой приемник 9 ЛА принимают радионавигационные сигналы НИСЗ; вычислитель 4 ОПС обрабатывает принятые сигналы и формирует массив псевдодальностей до НИСЗ и координаты ОПС. Далее эти данные поступают на вход вычислителя поправок 5, на который также поступают заданные координаты ОПС. Вычислитель 5 производит вычисление поправок на основе сравнения вычисленных им и известных координат ОПС и формирует КИ.
С помощью вычислителя 12 на основе координат ОПС, вводимых на первый вход вычислителя 121, и данных аэропорта, поступающих из блока 13 на вторые входы вычислителей 121...n, производится расчет оптимальных координат установки каждого из заданного числа ДПС, и эти ДПС размещаются в зоне аэропорта в соответствии с вычисленными оптимальными координатами.
С выхода вычислителя 5 вычисленные поправки к псевдодальностям до каждого из N НИСЗ поступают на вход распределителя поправок (РП) 14, распределяющего поправки на первый информационный вход передатчика 6 ОПС и на первые информационные входы передатчиков 16 ДПС. Одновременно на запускающий вход передатчика 6 поступают сигналы с выхода прецизионного опорного генератора 7. На запускающие входы всех передатчиков 16 ДПС поступают также сигналы со всех соответствующих опорных генераторов 15. Вычислитель 12 производит последовательное вычисление оптимальных координат для каждого ДПС и вводит их на вторые информационные входы передатчиков 16.
Информация, поступающая с выходов вычислителя 12 на входы передатчиков 16, остается неизменной, пока не произойдет изменение в системе НИСЗ спутниковой радионавигационной системы. Сигналы передатчиков 16, промодулированные дополнительно информацией, содержащей координаты ДПС и соответствующую данному ДПС часть КИ, задаваемую блоком 14, через передающие антенны 17 излучаются в направлении заходящих на посадку ЛА.
На ЛА сигналы ПС через антенну 10 принимаются бортовым приемником 9, который с учетом принятых поправок производит, во-первых, корректировку сформированных им виртуальных курсовых и глиссадных траекторий захода на посадку ЛА и, во-вторых, обеспечивает возможность бортовой аппаратуре поддерживать отклонение ЛА от этих траекторий в пределах норм, заданных для захода на посадку по 1-й категории посадочного метеоминимума ИКАО [4].
В СРНПС на фиг.3 реализована возможность оптимизации координат расположения ОПС. Это достигается с помощью введенного вычислителя 18, при этом оптимизация координат ОПС производится после расчета оптимальных координат всех ДПС. Для этого на первый вход вычислителя 18 подается сигнал с выхода вычислителя последнего ДПС 12n, а на второй его вход поступают данные аэропорта из блока 13; на выходе блока 18 сформированы оптимизированные координаты ОПС, при этом установка ОПС производится с оптимальными координатами. В этом варианте СРНПС ввод координат ОПС в систему производится с выхода вычислителя 18.
Выше рассматривались варианты СРНПС с заранее заданным числом псевдоспутников.
В то же время СРНПС более экономична, если число ДПС устанавливается в результате процесса оптимизации координат. В общем случае такая СРНПС определяется описанными ниже соотношениями.
Число введенных псевдоспутников n, длина вектора положения i-го псевдоспутника от точки пересечения оси ВПП с торцом ВПП Li, угол Аi между осью ВПП и упомянутым вектором положения Li определяются из условий оптимизации и, соответственно, из следующих функционалов Ф1, Ф2, Ф3:


где m - число оптимизированных по положению псевдоспутников,
F ∈ [ϕ впп, λ впп, hвпп, Аzвпп, ϕ k, λ k, hk, Limin, Limax, I (Н)],
ϕ впп, λ впп, hвпп - геодезические координаты точки О середины торца ВПП, соответственно широта, долгота и высота,
ϕ к, λ к, hk, - геодезические координаты начальной опорной точки эталонной глиссады, соответственно широта, долгота и высота,
Limin, Limax - минимальное и максимальное значения допустимых удалений i-го ПС от торца ВПП, причем эти величины есть функции от угла Аi,
I (H) - функционал качества,
Н - матрица направляющих косинусов:
где cos α i, cos β i, cos γ i, i=1,... , M+m - направляющие косинусы векторов положения ЛА [3] относительно НИСЗ и псевдоспутников в геодезической системе координат (см. фиг.4),

Функционал качества I представляет собой эффект от установки m псевдоспутников в различных допустимых точках аэропорта; он зависит от совокупности параметров {Li, Аi}, i=1,... , m. Регулярным перебором устанавливается оптимальная конфигурация сети из m ДПС. Возможные варианты формирования функционала I приводятся ниже при описании способа реализации предложенной СРНСП.
Вычисление оптимизированных координат ДПС по приведенным выше формулам (1-4) может производиться различными способами. Один из возможных способов и его варианты описаны ниже.
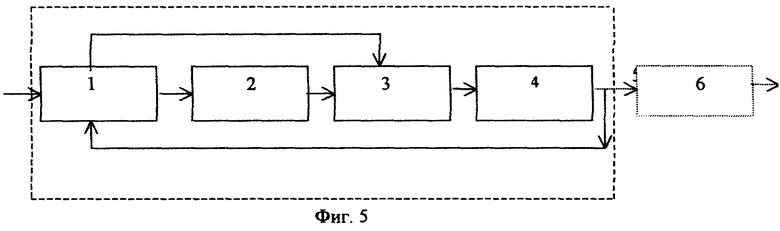
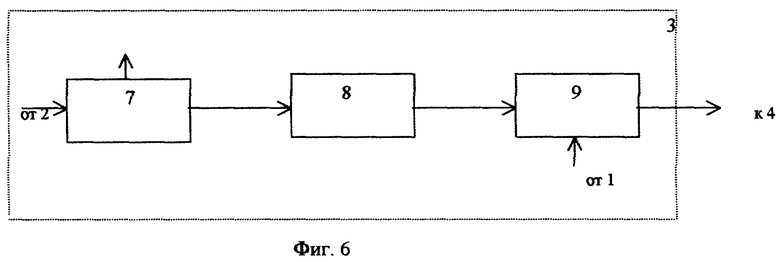
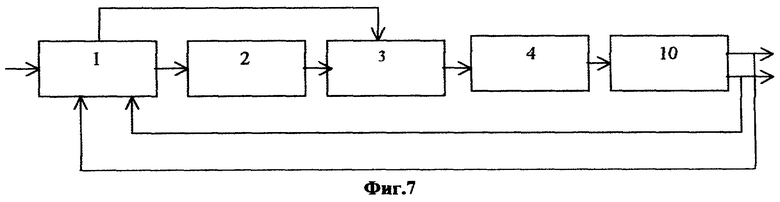
Суть предложенного способа поясняется на фиг.5, 6, 7.
На фиг.5 - общая схема предложенного способа захода на посадку и посадки ЛА.
На фиг.6 - схема варианта вычисления эффекта от установки j-го ДПС.
На фиг.7 - схема способа захода на посадку и посадки ЛА с автоматическим выбором числа допустимых ДПС.
Способ на фиг.5 состоит из следующей последовательности действий: формирование начальных условий - 1, определение начальной опорной точки заданной глиссады - 2, вычисление эффекта от установки 1-го ДПС - 3, присвоение оптимальных координат первому ДПС - 4. Пунктиром обозначено дополнительное действие - вычисление оптимальных координат ОПС - 6. Совокупность операций 1, 2, 3, 4 соответствует варианту способа, реализующего систему на фиг.2а. Совокупность операций 5 и 6 соответствуют варианту способа, реализующего систему на фиг.3.
По фрагменту 3 на фиг.6 вычисляют координаты всех НИСЗ системы по данным альманаха на интервале длительностью 1 сутки - 7, проводят отбор НИСЗ, составляющих “рабочее созвездие” - 8, вычисляют эффекты от установки j-го ДПС в различных допустимых точках аэропорта - 9.
Способ на фиг.7 полностью включает действия 1, 2, 3, 4 из фиг.5 и дополнен вычислением достаточного числа ДПС - 10.
Начальные условия 1 содержат следующие данные: координаты опорной точки ВПП (точка О на фиг.1а) и азимут осевой линии ВПП; ограничения на дальность от точки О до ДПС в зависимости от азимута; координаты опорных точек заданной глиссады; альманах спутниковой навигационной системы; координаты ОПС; число ДПС.
После определения оптимальных координат 1-го ДПС начальные условия дополняют информацией об оптимальных координатах 1-го ДПС (данными оптимизации). Далее процесс повторяют (n-1) раз; по его завершении начальные условия содержат всю информацию об оптимальных координатах n ДПС, в том числе дополнительную информацию. Эта информация в полном объеме используется для уточнения оптимальных координат ОПС (фиг.5). При автоматическом выборе достаточного числа ДПС начальные условия дополняют значением пороговой величины эффекта Λ 0 и максимальным числом ДПС nmax.
Начальную опорную точку заданной глиссады выбирают по требованиям к точности МО. По результатам вычисления 7 координат всех НИСЗ системы с шагом Δ t на интервале Т=1 сутки по данным альманаха отбирают на каждый момент времени на интервале Т те НИСЗ, которые попадают в “зону радиовидимости” из точки О, определяемую по заданному углу возвышения НИСЗ над горизонтом в точке О [3].
Вычисление эффектов от установки j-го ДПС в различных допустимых точках аэропорта 9 производят при регулярном переборе всех допустимых расположений ДПС на территории конкретного аэропорта для всех временных точек из интервала Т. Текущий эффект Λ j равен отношению геометрического фактора вертикальной составляющей местоопределения VDOP по созвездию навигационных точек, состоящему из N НИСЗ спутниковой навигационной системы, ОПС и j ДПС, к усредненному во времени геометрическому фактору вертикальной составляющей местоопределения по созвездию навигационных точек, которое состоит из N НИСЗ спутниковой навигационной системы, ОПС и (j-1) ДПС, причем последние расположены в точках, соответствующих оптимальным координатам (j-1) ДПС:

В формуле (5) индексом (*) помечены оптимизированные координаты ДПС; М [• ] означает усреднение во времени на интервале Т,
где Q - количество временных точек на интервале Т,
tq - текущий момент времени:

Вертикальный геометрический фактор VDOP есть функция [3] от матрицы направляющих косинусов Н при определении эффекта от установки j-го ДПС, имеющей вид Нj:
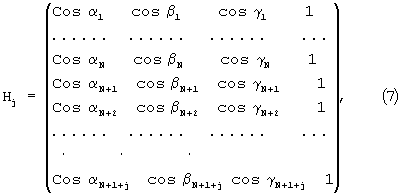
и координат ЛА, расположенного в начальной опорной точке эталонной глиссады.
Результаты вычисления эффектов от установки j-го ДПС в различных допустимых точках аэропорта 9 используют далее для расчета усредненных во времени текущих эффектов М [Λ ’j] 4 и по полученным значениям определяют оптимальное значение эффекта и оптимальные координаты j-го ДПС согласно формуле

и присваивают их j-му ДПС.
После того, как присвоены оптимальные координаты всем n ДПС, оптимизируют ОПС - 6. Для этого повторяют операции 3 и 4 относительно координат ОПС при известных координатах N НИСЗ и оптимальных координатах всех ДПС.
При автоматическом выборе числа ДПС (фиг.7) после вычисления эффекта от установки j-го ДПС в точке с оптимальными координатами, рассчитываемыми по формуле (8), производят сравнение этой величины с пороговым значением Λ 0. Если эффект меньше, чем пороговое значение, то принимают решение о том, что j-й ДПС не является необходимым, то есть достаточно (j-1) ДПС. В противном случае процесс продолжается либо до перебора всех nmax ДПС, либо до нахождения такого числа ДПС n<nmax, при котором эффект меньше порогового значения.
Выше описан один из возможных вариантов оптимизаций, реализуемых схемами фиг.5, 6, 7, в том числе расчета эффекта от установки j-го ДПС и определения оптимальных координат j-го ДПС. Величина М [Λ ’j], характеризующая эффект, может быть обобщена в виде функции Λ i, сконструированной на основе геометрических факторов вертикальной составляющей местоопределения (VDOP), горизонтальной (HDOP) и временной (TDOP), взятых с соответствующими вероятностями непревышения заданного значения р или р-квантилями компонент VDOP, HDOP, TDOP. Рассмотренному частному случаю соответствует р=0,50 по VDOP и р=1 - по HDOP и TDOP, тип функции - линейный.
Для рассмотренного варианта было проведено имитационное моделирование. Число временных точек составляло Q=1000. Система спутников соответствовала СРНС GPS; аэропорт Пулково; начальная опорная точка заданной глиссады отстояла от опорной точки ВПП на 850 м; высота расположения ЛА в начальной опорной точке глиссады составляла 60 м над поверхностью Земли. Усредненный во времени эффект от установки одного ДПС составлял (1.35-1.5), двух ДПС - (1.5-1.66), трех - (1.66-1.74). Большие значения эффекта соответствуют случаю оптимизированных координат ОПС. Максимальное значение эффекта, имевшее место в течение интервала повторяемости конфигурации сети спутников системы GPS, при трех ДПС составляло 4.4.
Если задано пороговое значение Λ 0, то результаты следующие. При Λ 0=1.1 достаточное число ДПС составляло n=2. При Λ 0=1.05 и nmax=3 - соответственно n=nmax.
Таким образом, заявленное изобретение позволяет ЛА, оборудованному спутниковым приемником, осуществлять инструментальную посадку на любой аэродром, не оборудованный стандартными дорогостоящими наземными системами посадки типа международных систем посадки ILS и MLS, или отечественной системой посадки типа СП-50, оснащенной группой сравнительно недорогих ПС, в любых метеоусловиях и в любое время суток.
При этом повышается эксплуатационная способность СРНПС, т.к. приаэродромная зона не требует специального нивелирования подстилающей поверхности земли для обеспечения равномерности формирования лепестков диаграмм направленности передающих устройств радиомаяков посадочных систем, а также не возникает необходимости в регулярных перепроверках радиомаяков и уточнениях формируемых ими в пространстве линий курса и глиссады снижения ЛА.
В целом функционирование СРНПС и выходные характеристики ОПС и ДПС проверены и оценены с помощью программно-математического моделирования на персональном компьютере. В качестве большинства узлов и блоков используются серийно выпускаемые изделия:
- наземный приемник 3 и вычислитель 4 реализованы в стандартном приемоиндикаторе типа “Бриз”, обеспечивающем возможность получать информацию в цифровом виде с его выхода;
- вычислитель дифференциальных поправок 5, вычислители оптимальных координат 12, 18 и блок информационных параметров 13 построены на базе универсальной ЦВМ;
- распределитель поправок 14 разработан на базе передатчика последовательного кода по ARINC 429 типа HI 8586 фирмы Holt (США);
- опорный генератор 7 ОПС - опорный генератор типа "Берилл" разработки СКБ "Марион";
- передатчик 6 ОПС и передатчики 16 ДПС - типа передатчика бортовой аппаратуры предупреждения столкновения "Эшелон";
- антенны 2, 11 и 10 - антенна типа AC-01;
- бортовой приемник 9 на борту ЛА - используется любой отечественный или зарубежный спутниковый приемник, обеспечивающий обработку данных НИСЗ и ПС.
Таким образом, предложенные новые спутниково-псевдоспутниковая система и способ захода на посадку и посадки ЛА обеспечивают возможность осуществления захода на посадку и посадки ЛА в метеоусловиях 1-й категории посадочного метеоминимума на аэродромы, не оборудованные стандартными радиомаячными системами посадки.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Способ дифференциальной навигации. Патент РФ 2130622, G 01 S 5/12, заявлен 19.12.97, опубликован 20.05.99.
2. GPS PRECISION APPROACH AND LANDING SYSTEM FOR AIRCRAFT. Patent Number: 5311194, Date of Patent: May 10, 1994.
3. Сетевые спутниковые радионавигационные системы. / В.С. Шебшаевич, П.П. Дмитриев, Н.В. Иванцевич и др., под редакцией В.С. Шебшаевича. - М.: Радио и связь, 1993, 408 с.
4. Международные стандарты и рекомендуемая практика. Авиационная связь. Приложение 10 к Конвенции ИКАО, том 1 (радионавигационные средства), издание пятое тома 1 - июль 1996 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ПОСАДКИ С ИСПОЛЬЗОВАНИЕМ ПСЕВДОСПУТНИКОВ | 2010 |
|
RU2439617C1 |
| Устройство обеспечения посадки летательного аппарата | 2020 |
|
RU2757804C1 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |
| КОМПЛЕКСИРОВАННЫЙ УНИВЕРСАЛЬНЫЙ ВСЕПОГОДНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ПОСАДКИ ВОЗДУШНОГО СУДНА И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2441203C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПОЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ "БАГИС-С" | 1995 |
|
RU2108613C1 |
| СИСТЕМА ВЫСОКОТОЧНОЙ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2287838C2 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И СИСТЕМА ПОСАДКИ НА ЕГО ОСНОВЕ | 2008 |
|
RU2371737C1 |
| СИСТЕМА ДЛЯ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК К ИЗМЕРЯЕМЫМ КООРДИНАТАМ ПОДВИЖНОГО ОБЪЕКТА | 1986 |
|
SU1840575A1 |
Изобретение относится к области посадки летательных аппаратов (ЛА) на основе спутниковых радионавигационных систем (СРНС) ГЛОНАСС, GPS, GNSS и может быть использовано для оснащения необорудованных радиомаячными посадочными средствами аэродромов и вертолетных площадок, что и является достигаемым техническим результатом. СРНС захода на посадку и посадки ЛА содержит N навигационных искусственных спутников Земли (НИСЗ), опорный псевдоспутник (ОПС), расположенный у торца ВПП и состоящий из последовательно соединенных приемной антенны, наземного приемника, вычислителя измеряемых параметров и вычислителя поправок, а также передатчика корректирующей информации, запускающий вход которого соединен с выходом опорного генератора, выход соединен с входом передающей антенны, а установочный вход вычислителя поправок служит для ввода координат ОПС, каждый из упомянутых НИСЗ связан информационной связью передача-прием с ЛА и с наземным приемником, а передатчик корректирующей информации связан информационной связью передача-прием через антенны и с ЛА, при этом введены дополнительные спутники (ДПС), размещенные в фиксированных точках у ВПП, вычислитель оптимальных координат (ВОК) ДПС, блок информационных параметров аэропорта и распределительный узел, каждый из ДПС содержит опорный генератор, передатчик, обеспечивающий через передающую антенну информационную связь с ЛА, распределительный узел соединен входом с выходом вычислителя поправок, первым выходом с первым информационным входом передатчика, а остальными выходами соединен соответственно с первыми информационными входами передатчиков, ВОК включает n вычислителей, соединенных между собой последовательно, вычислители имеют выходы, соединенные с информационными входами передатчиков ДПС, и входы, соединенные с выходом блока информационных параметров аэропорта, на вход ВОК введены координаты ОПС. Предложенный способ захода на посадку и посадки ЛА использует спутниковую навигационную систему посадки по ОПС и n ДПС. 2 с. и 5 з.п.ф-лы, 7 ил.
m=Ф1[F]=n;
где m - число оптимизируемых по положению псевдоспутников;
F ∈ [ϕвпп, λвпп, hвпп, Аzвпп, ϕk, λk, hk, Limin, Limax, I (Н)];
ϕвпп, λвпп, hвпп - широта, долгота и высота середины торца ВПП;
Аzвпп - азимут осевой линии ВПП;
ϕk, hk, λk - геодезические координаты k-й опорной точки эталонной глиссады, соответственно широта, долгота и высота;
Limin - минимально допустимое удаление i-го псевдоспутника от торца ВПП;
Limax - максимальное удаление i-го псевдоспутника от торца ВПП;
I(Н) - функционал качества;
Н - матрица направляющих косинусов, определяемая уравнением
cos αi, cos βi, cos γi, i=1...М+m - направляющие косинусы векторов положений НИСЗ и псевдоспутников относительно ЛА в геоцентрической системе координат,
М=N+1.
m=Ф1[F]=n+1;
где m - число оптимизируемых по положению псевдоспутников;
F ∈ [ϕвпп, λвпп, hвпп, Аzвпп, ϕk, λk, hk, Limin, Limax, I (Н)];
ϕвпп, λвпп, hвпп - широта, долгота и высота середины торца ВПП;
Аzвпп - азимут осевой линии ВПП;
ϕk, hk, hk - геодезические координаты k-й опорной точки эталонной глиссады, соответственно широта, долгота и высота;
Limin - минимально допустимое удаление i-го псевдоспутника от торца ВПП;
Limax - максимальное удаление i-го псевдоспутника от торца ВПП;
I(Н) - функционал качества;
Н - матрица направляющих косинусов, определяемая уравнением
cos αi, cos βi, cos γi, i=1...М+m - направляющие косинусы векторов положений НИСЗ и псевдоспутников относительно ЛА в геоцентрической системе координат;
М=N.

где Λ0 - пороговая величина эффекта от установки ДПС;
Λj - текущее значение эффекта от установки ДПС.
| Сетевые спутниковые радионавигационные системы | |||
| / Под ред | |||
| В.С | |||
| ШЕБШАЕВИЧА | |||
| - М.: Радио и связь, 1993, с.288, 290, рис.20.3 | |||
| RU 99119060 А, 10.07.2001 | |||
| RU 98109269 А, 10.02.2000 | |||
| US 4866450 А, 12.09.1989 | |||
| US 5017930 А, 21.05.1991 | |||
| КОЛЛЕКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА ПОСТОЯННОГОТОКА | 0 |
|
SU273326A1 |

