Изобретение относится к авиационной радионавигации и может быть использовано в дальномерных каналах посадочных радиомаячных групп (ПРМГ), используемых на аэродромах для посадки летательных аппаратов (ЛА) гражданской, экспериментальной и государственной авиации.
Ретранслятор дальномера (РД) посадочной радиомаячной группы является составной частью системы ПРМГ и обеспечивает по запросному радиосигналу бортовой аппаратуры ЛА измерение наклонной дальности на борту ЛА по ответному радиосигналу РД.
Известны РД, используемые в посадочных радиомаячных группах ПРМГ-5 [1], ПРМГ-76У [1], ПРМГ-76УМ [2], ПРМГ-76УМ1 [3].
РД ПРМГ-5 предназначен для обеспечения захода ЛА на посадку при метеоминимуме I категории при работе с бортовым радиооборудованием ближней навигации РСБН-2С [4] и ее модификациями.
Недостатками ретранслятора дальномера ПРМГ-5 является: - практическая невозможность его серийного изготовления ввиду морального устаревания элементной базы и материалов;
- ретранслятор дальномера ПРМГ-5 обеспечивает посадку ЛА, бортовое оборудование которых работает на частотах только отечественного диапазона (ОД), что приводит к пониженной электромагнитной совместимости (ЭМС) и соответственно к низкой помехоустойчивости в условиях мешающего действия средств мобильной связи, создающих для ПРМГ-5 непреднамеренные активные помехи;
- отсутствие канала оперативной передачи бортовой информации от ЛА на ПРМГ-5 и обратно от ПРМГ-5 на ЛА, что приводит к невозможности оценки, например, параметров положения ЛА в воздушном пространстве на ПРМГ-5 и соответственно на командно-диспетчерском пункте (КДП) аэродрома.
РД ПРМГ-76У предназначен для обеспечения захода ЛА на посадку при метеоминимуме I и II категории.
РД ПРМГ-76УМ обеспечивает заход на посадку ЛА, оборудованных совместимой бортовой аппаратурой и имеет следующие преимущества по сравнению с ПРМГ-76У [2]:
- аппаратура переведена на современную элементную базу;
- энергопотребление основной аппаратурой уменьшено в 2 раза. Недостатками ретрансляторов дальномера ПРМГ-76У и ПРМГ-
76УМ является:
- ретрансляторы дальномера ПРМГ-76У и ПРМГ-76УМ обеспечивают посадку Л А, бортовое оборудование которых работает на частотах только ОД, что приводит к пониженной ЭМС и соответственно к низкой помехоустойчивости в условиях мешающего действия средств мобильной связи, создающих для ПРМГ-76У и ПРМГ-76УМ непреднамеренные активные помехи;
- отсутствие канала оперативной передачи бортовой информации от ЛА на ПРМГ-76У (ПРМГ-76УМ), а также обратно от ПРМГ-76У (ПРМГ-76УМ) на ЛА, что приводит к отсутствию важной информации, например, параметров положения и движения ЛА в воздушном пространстве относительно линии посадки на ПРМГ-76У (ПРМГ-76УМ) и соответственно на КДП аэродрома.
РД ПРМГ-76УМ1 работает в двух диапазонах частот с одновременным излучением сигналов посадки на существующих частотных каналах системы ПРМГ-76УМ и частотных каналах, выделенных системе РСБН/ПРМГ в международном диапазоне частот.
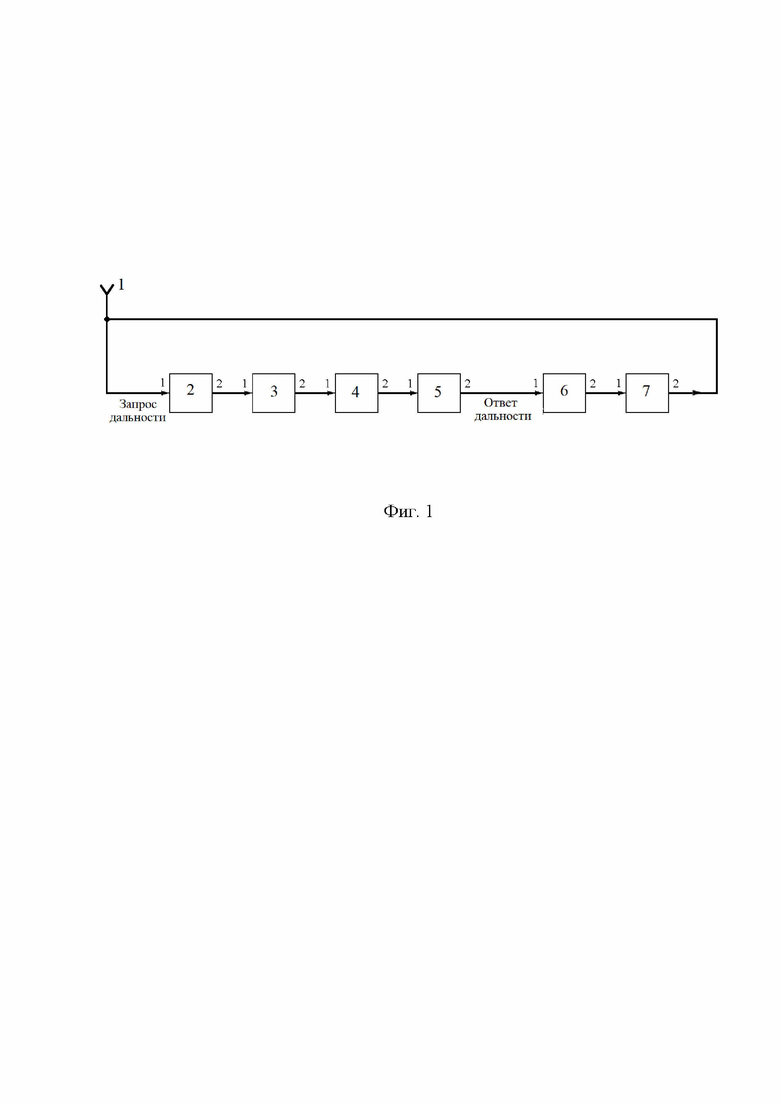
Наиболее близким по технической сущности к предлагаемому устройству является ретранслятор дальномера, выбранный в качестве прототипа [5] (см. фиг. 1), содержащий приемо-передающую антенну 1, приемник 2, пороговый блок 3, дешифратор 4, элемент задержки 5, шифратор 6 и передатчик 7 с соответствующими связями.
Запрос дальности через приемо-передающую антенну 1 поступает на приемник 2, где фильтруется, усиливается и детектируется. С выхода приемника 2 запрос дальности проходит пороговый блок 3 и дешифратор 4 и поступает на элемент задержки 5. С выхода элемента задержки 5 ответ дальности проходит шифратор бис помощью передатчика 7 излучается приемо-передающей антенной 1 на борт ЛА. При этом величина задержки в элементе задержки 5 выбирается такой, чтобы обеспечить эталонное значение задержки тракта ретранслятора дальномера.
Недостатком РД [5], как и РД [1-3], является низкая информативность дальномерного канала, обеспечивающего только измерение дальности на борту ЛА.
При разработке предлагаемого изобретения решалась техническая проблема, заключающаяся в создании РД, обеспечивающего обмен данными между наземными радиомаяками ПРМГ и бортовым оборудованием при заходе ЛА на посадку, что позволяет:
- получать для группы руководства полетами (ГРП) координатную и дополнительную информацию о ЛА, находящихся в зоне действия наземных радиомаяков ПРМГ;
- оперативно передавать на ЛА информацию об опознавании, категории и готовности наземных радиомаяков ПРМГ, а также специальную информацию в целях повышения безопасности процесса захода на посадку.
Техническим результатом предлагаемого изобретения является повышение информативности дальномерного канала РД.
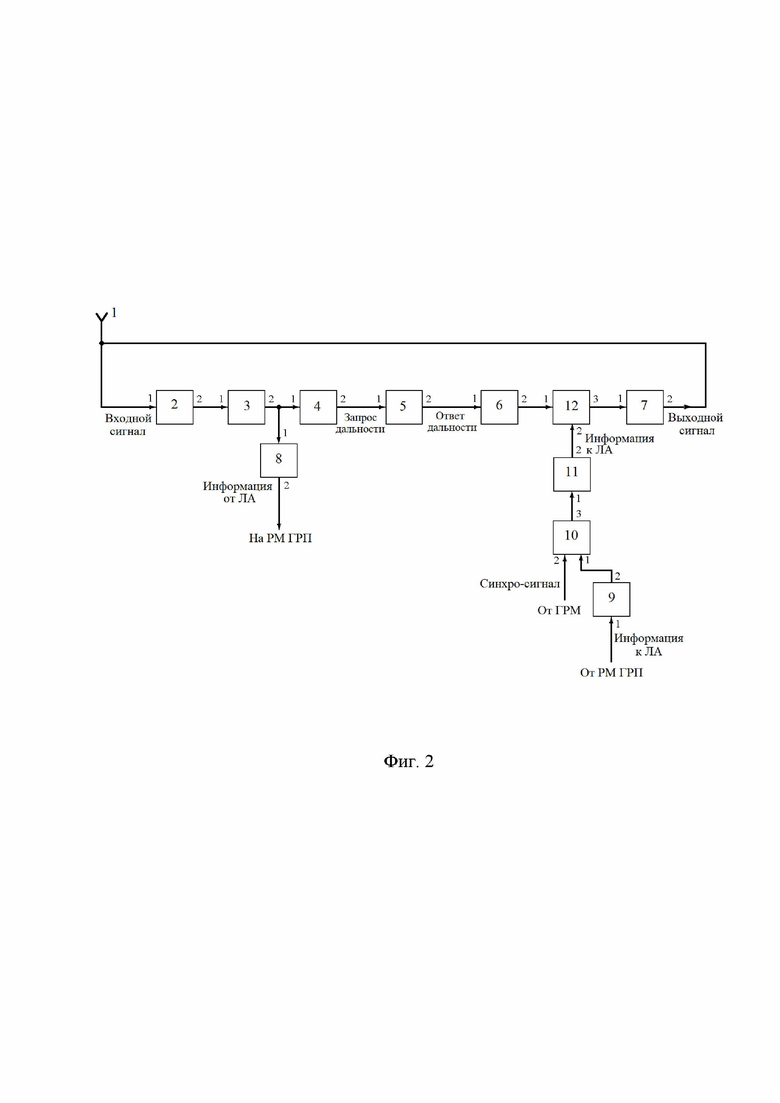
Указанный технический результат достигается тем, что в ретранслятор дальномера посадочной радиомаячной группы, содержащий последовательно соединенные приемо-передающую антенну 1, приемник 2, пороговый блок 3, первый дешифратор 4, элемент задержки 5, первый шифратор 6 и передатчик 7, выход которого соединен с приемо-передающей антенной 1, предлагается ввести второй дешифратор 8, запоминающее устройство 9, устройство синхронизации 10, второй шифратор 11 и элемент ИЛИ 12 между выходом первого шифратора 6 и входом передатчика 7. При этом выход порогового блока 3 соединен со вторым дешифратором 8, с выхода которого информационное сообщение от ЛА поступает на рабочее место (РМ) ГРП, тогда как информация для ЛА от РМ ГРП поступает на запоминающее устройство 9, выход которого соединен с первым входом устройства синхронизации 10, на второй вход которого поступает синхро-сигнал от глиссадного радиомаяка (ГРМ), выход устройства синхронизации 10 соединен со входом второго шифратора 11, выход которого соединен со вторым входом элемента ИЛИ 12.
Введение новых блоков позволяет сформировать и ввести дополнительные информационные данные ЛА и ПРМГ соответственно в имеющиеся прямой запросный и обратный ответный радиоканалы РД и, таким образом, наряду с текущим измерением дальности на борту ЛА, выполнить при помощи РД:
- оперативную передачу бортовой информации ЛА по прямому запросному радиоканалу РД на ПРМГ,
- оперативную передачу наземной информации ПРМГ по обратному ответному радиоканалу РД на борт ЛА.
Сущность предлагаемого изобретения поясняется следующими чертежами:
Фиг. 1, на которой приведена функциональная схема прототипа, где
1 - приемо-передающая антенна, 2 - приемник, 3 - пороговый блок, 4 - дешифратор, 5 - элемент задержки, 6 - шифратор, 7 - передатчик;
Фиг. 2, на которой приведена функциональная схема предлагаемого ретранслятора дальномера посадочной радиомаячной группы, где 8 - второй дешифратор, 9 - запоминающее устройство, 10 - устройство синхронизации, 11 - второй шифратор и 12 - элемент ИЛИ;
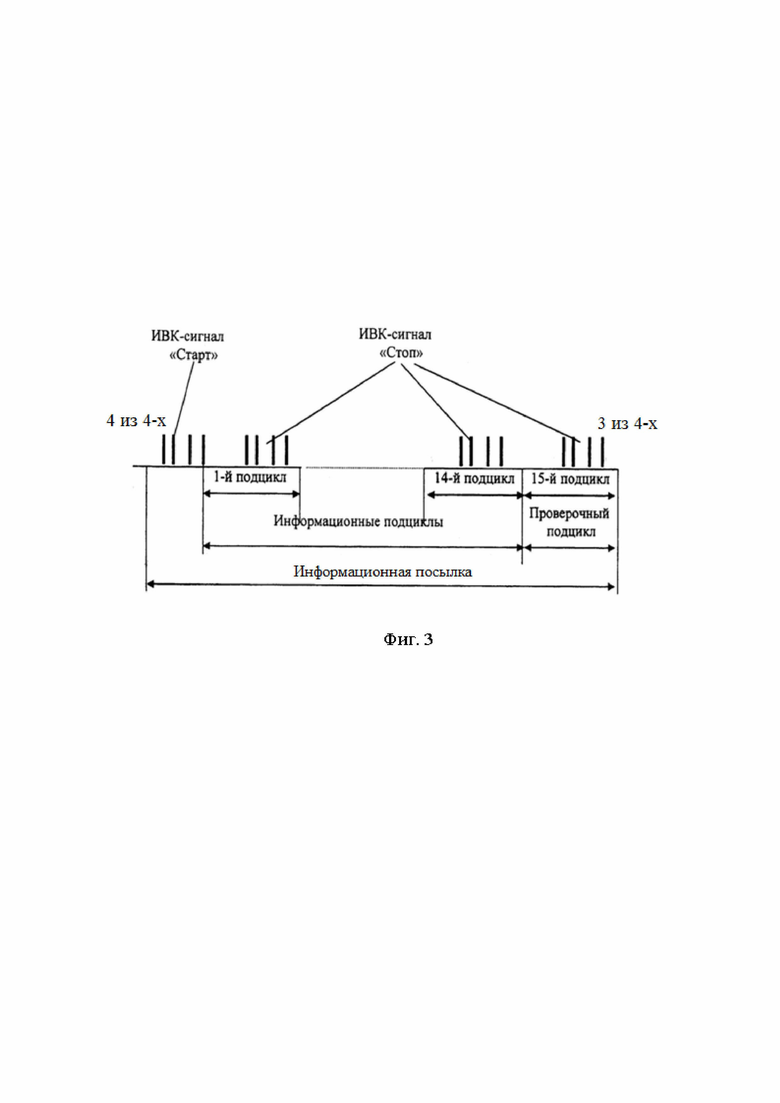
Фиг. 3, на которой изображены информационные посылки (ИП), используемые при обмене данными;
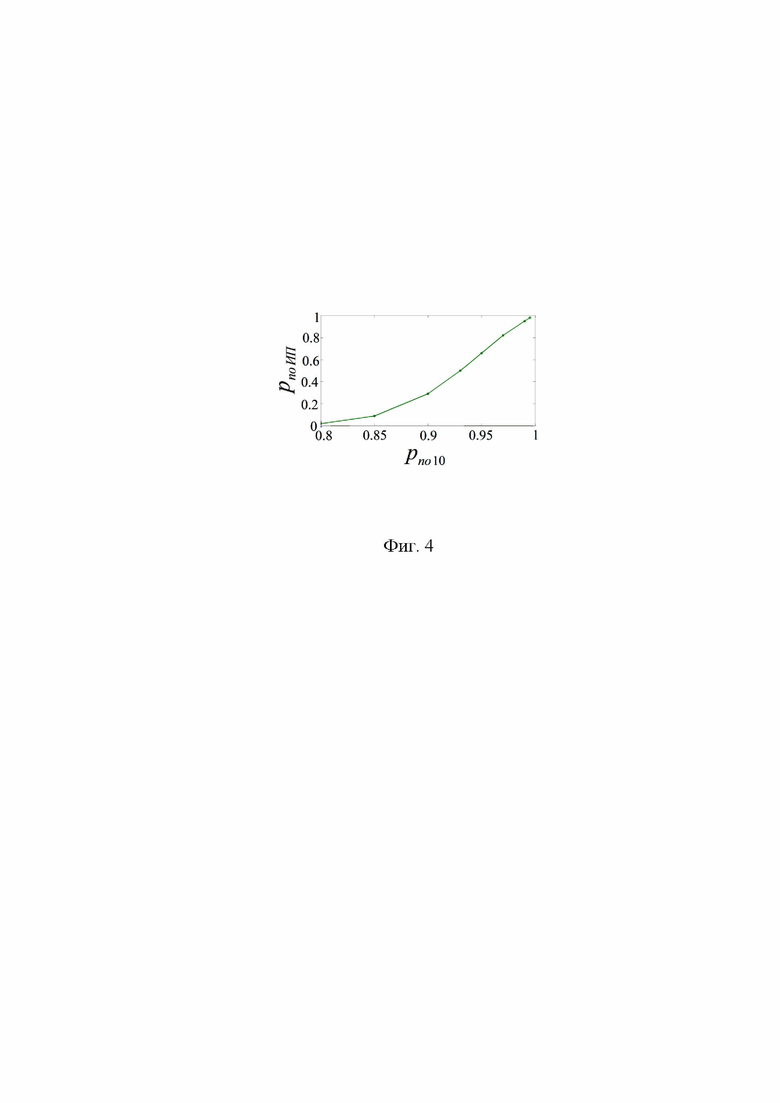
Фиг. 4, на которой приведена зависимость вероятности правильного обнаружения ИП от вероятности правильного обнаружения одиночного импульса.
Ретранслятор дальномера посадочной радиомаячной группы работает следующим образом.
Входной сигнал через приемо-передающую антенну 1 поступает на приемник 2, где фильтруется, усиливается и детектируется. Входной сигнал может представлять собой как запрос дальности, так и информационное сообщение от ЛА.
С выхода приемника 2 входной сигнал проходит пороговый блок 3 и поступает на первый дешифратор 4 и второй дешифратор 8. На выход первого дешифратора 4 поступает только запрос дальности, а информационное сообщение от ЛА не поступает. На выход второго дешифратора 8, наоборот, поступает только информационное сообщение от ЛА. С выхода второго дешифратора 8 информационное сообщение от ЛА поступает на РМГРП.
Информационное сообщение от ЛА сначала поступает на ГРМ по проводной линии связи, а с ГРМ передается на РМ ГРП через модем физической линии (проводная связь), либо через радиомодем. Информация для ЛА аналогичным путем поступает с РМ ГРП на ретранслятор дальномера.
С выхода первого дешифратора 4 запрос дальности поступает на элемент задержки 5. С выхода элемента задержки 5 ответ дальности проходит первый шифратор 6 и поступает на первый вход элемента ИЛИ 12.
На запоминающее устройство 9 поступает информация для ЛА от РМ ГРП. С выхода запоминающего устройства 9 на первый вход устройства синхронизации 10 поступает запомненная информация для ЛА.
На второй вход устройства синхронизации 10 поступает синхросигнал от ГРМ ПРМГ. Синхросигнал используется для временного разделения передачи информации для ЛА и сигналов ГРМ, излучаемых на одном частотном канале. На выход устройства синхронизации 10 в моменты времени, определяемые синхросигналом, поступает запомненная информация для ЛА. С выхода устройства синхронизации 10 запомненная информация для ЛА проходит второй шифратор 11 и поступает на второй вход элемента ИЛИ 12.
На выход элемента ИЛИ 12 поступает выходной сигнал, представляющий собой ответ дальности или информационное сообщение для ЛА. Выходной сигнал с выхода элемента ИЛИ 12 с помощью передатчика 7 излучается приемо-передающей антенной 1 на борт ЛА. При этом величина задержки в элементе задержки 5 выбирается такой, чтобы обеспечить эталонное значение задержки ответа дальности относительно запроса дальности в тракте ретранслятора дальномера.
Использование ретранслятора дальномера посадочной радиомаячной группы позволяет передавать на РМ ГРП данные о положении ЛА относительно заданной траектории снижения, а также наиболее важную информацию, отображаемую в кабине пилота. Это позволяет реализовать на командно-диспетчерском пункте аэродрома отображение приборов, на которых представляются данные, характеризующие процесс управления ЛА при заходе на посадку, что позволяет оценить качество выполнения экипажем заключительного этапа полета.
Обратный канал передачи данных может быть использован для передачи на борт ЛА данных о состоянии наземных систем, действующей категории системы посадки и другой специальной информации, что также является важным, так как такая информация должна представляться достаточно оперативно в ограниченное время.
Канал передачи данных в предлагаемом изобретении реализуется путем использования многоимпульсных кодовых групп со сложной логикой декодирования. Для оценки эффективности обмена данными требуется определить вероятности правильного обнаружения и ложных тревог для кодовых групп импульсов канала передачи данных.
При использовании импульсных сигналов подавление помехой хотя бы одного импульса полезного сигнала, а также появление ложных импульсов на кодовых интервалах полезного сигнала приводит к ошибкам -пропускам и ложным тревогам.
ИП, используемые при обмене данными содержат (см. фиг. 3):
- стартовую группу импульсов, представляющих собой четырехим-пульсный интервально-временной код (ИВК), используемый для синхронизации;
- 15 стоповых импульсных групп (стоповых сигналов с 4-х импульсным ИВК), используемых для передачи информации 32-битными подциклами, причем последняя (пятнадцатая) импульсная группа является проверочной и содержит контрольную сумму ИП.
Декодирование стартовой группы импульсов должно выполняться по логике дешифратора «4 из 4-х»; стоповых импульсных групп - по логике «3 из 4-х».
Очевидно, что для ИП вероятность ложных тревог пренебрежимо мала, т.к. при их передаче используется большое количество импульсов, а также контрольная сумма.
Вероятности правильного обнаружения стартовой и стоповой групп импульсов определяются соответственно выражениями (1) и (2) [6]


где р10 - вероятность подавления помехой одного импульса ИП, зависящая от конкретного вида помехи и ее интенсивности; r, j - соответственно номера импульсов стартовой и стоповой групп.
С учетом выражений (1) и (2) вероятность правильного обнаружения ИП можно представить выражением

Вероятность приема и правильного обнаружения одного импульса полезного сигнала является одной из основных количественных характеристик качества приемных устройств, используемых в системах авиационной радионавигации и радиолокации и выражается через р10

В [6] получена и приведена зависимость вероятности правильного обнаружения ИП (3) от вероятности правильного обнаружения одиночного импульса (4) (см. фиг. 4).
Значения вероятности правильного обнаружения ИП, требуемые при работе РД, определяются условием

Как следует из фиг. 4 [6], условие (5) выполняется при вероятности правильного обнаружения одиночного импульса не менее 0,95.
Для реализации канала передачи данных требуемые аппаратные доработки прототипа незначительны. Это обусловлено тем, что в заявляемом РД используются общие с прототипом антенна, приемник и передатчик, а также импульсный сигнал, совпадающий по форме импульсов и несущей частоте с дальномерным сигналом. Кроме того, программная реализация канала передачи данных может быть выполнена на общей с прототипом программно-аппаратной платформе.
Дополнительно введенные в ретранслятор дальномера второй дешифратор 8, запоминающее устройство 9, устройство синхронизации 10, второй шифратор 11 и элемент ИЛИ 12 могут быть реализованы на программируемой логической интегральной схеме (ПЛИС), в частности, на ПЛИС 5576ХС4Т АЕЯР.431260.734ТУ [7] производства «Воронежского завода полупроводниковых приборов» («ВЗПП-С») из состава ПРМГ-76УМ1.
Эффективность новой схемы построения РД подтверждена положительными результатами ее испытаний и проверки в модифицированном ретрансляторе дальномера, разработанном в 2021 году в АО «ЧРЗ «Полет» для серийного изделия ПРМГ-76УМ1.
Использование в модифицированном РД ПРМГ-76УМ1 новой схемы построения РД позволило повысить информативность дальномерного канала, обеспечивающего:
- оперативную передачу бортовой информации ЛА по прямому запросному радиоканалу РД на наземную ПРМГ;
- оперативную передачу наземной информации ПРМГ по обратному ответному радиоканалу РД на борт ЛА.
ЛИТЕРАТУРА
1. Описание ПРМГ-5. [Электронный ресурс]. Режим доступа: http://тц-алет.рф/посадочные-радиомаячные-группы/ (дата обращения 5.10.2021).
2. Описание ПРМГ-76УМ. [Электронный ресурс]. Режим доступа: https://www.polyot.ru/products/24/ прмг-76ум (дата обращения 8.10.2021).
3. Описание ПРМГ-76УМ1. [Электронный ресурс]. Режим доступа: https://www.polyot.ru/products/364/ прмг-76ум1 (дата обращения 8.10.2021).
4. Описание РСБН-2С.[Электронный ресурс]. Режим доступа: https://www.aeroteclmik.rU/catalog/cis/product/view/2/88325 (дата обращения 7.10.2021).
5. Макаров К.В. Радионавигационные системы аэропортов. - М.: Транспорт, 1978 - с. 227 - 255.
6. Ершов Г.А., Недобежкин М.И., Синицын Е.А., Фридман Л.Б. Определение вероятностных характеристик дальномерного и информационного радиоканалов системы ПРМГ // Сборник докладов 28-ой международной конференции «СВЧ-техника и телекоммуникационные технологии». - Севастополь, 2018. - С. 361 -365.
7. Микросхемы интегральные 5576ХС4Т. Технические условия. АЕЯР.431260.734 ТУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ретранслятор дальномера посадочной радиомаячной группы с каналом передачи данных | 2022 |
|
RU2786058C1 |
| Посадочная радиомаячная группа дециметрового диапазона длин волн | 2022 |
|
RU2801583C1 |
| Способ и радиомаяк системы инструментальной посадки с функцией проверки и калибровки бортовых приемников воздушных судов (варианты) | 2023 |
|
RU2816376C1 |
| Способ и устройство контроля за положением глиссады и координатами самолёта в дальней зоне | 2018 |
|
RU2692079C1 |
| ПОМЕХОУСТОЙЧИВЫЙ БОРТОВОЙ ПРИЕМНИК РАДИОТЕХНИЧЕСКОЙ СИСТЕМЫ БЛИЖНЕЙ НАВИГАЦИИ | 2010 |
|
RU2427074C1 |
| СПОСОБ РЕГУЛИРОВКИ ИНФОРМАЦИОННОГО ПАРАМЕТРА КУРСО-ГЛИССАДНЫХ РАДИОМАЯКОВ И УСТРОЙСТВА ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2017 |
|
RU2695316C2 |
| ГЛИССАДНЫЙ РАДИОМАЯК ДЛЯ ЗАХОДА НА ПОСАДКУ ПО КРУТОЙ ТРАЕКТОРИИ (ВАРИАНТЫ) | 2016 |
|
RU2619071C1 |
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЭЛЕКТРОМАГНИТНОЙ СОВМЕСТИМОСТИ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОЙ СИСТЕМЫ БЛИЖНЕЙ НАВИГАЦИИ И СИСТЕМЫ ПОДВИЖНОЙ РАДИОСВЯЗИ | 2010 |
|
RU2433540C2 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2478979C1 |
Изобретение относится к авиационной радионавигации и может быть использовано в дальномерных каналах посадочных радиомаячных групп (ПРМГ), используемых на аэродромах для посадки летательных аппаратов (ЛА) гражданской, экспериментальной и государственной авиации. Техническим результатом является повышение информативности дальномерного канала ретранслятора дальномера (РД). Заявленный ретранслятор дальномера посадочной радиомаячной группы является составной частью системы ПРМГ и обеспечивает по запросному радиосигналу бортовой аппаратуры ЛА измерение наклонной дальности на борту ЛА по ответному радиосигналу РД. Ретранслятор содержит последовательно соединенные приемо-передающую антенну 1, приемник 2, пороговый блок 3, первый дешифратор 4, элемент задержки 5, первый шифратор 6 и передатчик 7, выход которого соединен с приемо-передающей антенной 1. В заявленное устройство дополнительно введены второй дешифратор 8, запоминающее устройство 9, устройство синхронизации 10, второй шифратор 11 и элемент ИЛИ 12 между выходом первого шифратора и входом передатчика. 4 ил.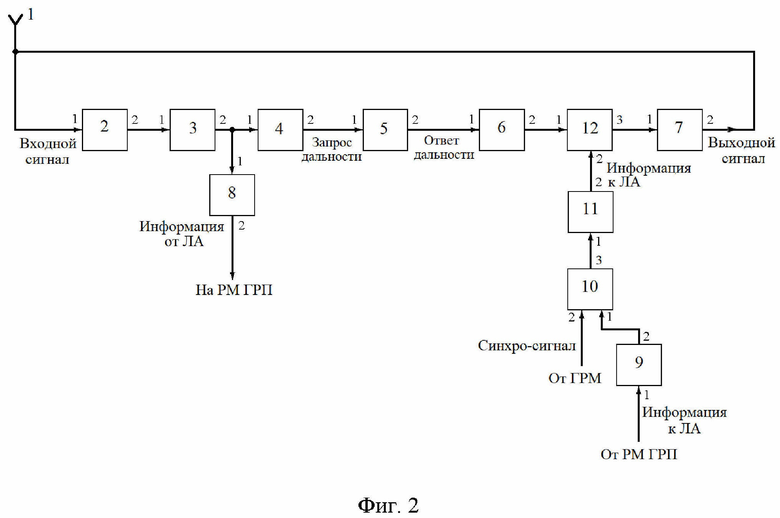
Ретранслятор дальномера посадочной радиомаячной группы, содержащий последовательно соединенные приемо-передающую антенну 1, приемник 2, пороговый блок 3, первый дешифратор 4, элемент задержки 5, первый шифратор 6 и передатчик 7, выход которого соединен с приемо-передающей антенной 1, отличающийся тем, что в него дополнительно введены второй дешифратор 8, запоминающее устройство 9, устройство синхронизации 10, второй шифратор 11 и элемент ИЛИ 12 между выходом первого шифратора 6 и входом передатчика 7, причем выход порогового блока 3 соединен со вторым дешифратором 8, с выхода которого информационное сообщение от летательных аппаратов (ЛА) поступает на рабочее место (РМ) группы руководства полетами (ГРП), тогда как информация для ЛА от РМ ГРП поступает на запоминающее устройство 9, выход которого соединен с первым входом устройства синхронизации 10, на второй вход которого поступает синхросигнал от глиссадного радиомаяка (ГРМ), выход устройства синхронизации 10 соединен со входом второго шифратора 11, выход которого соединен со вторым входом элемента ИЛИ 12.
| Ретранслятор дальномера | 1983 |
|
SU1102353A1 |
| RU 1729215 A1, 10.02.1996 | |||
| Способ и устройство контроля за положением глиссады и координатами самолёта в дальней зоне | 2018 |
|
RU2692079C1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2018855C1 |
| ЕРШОВ Г.А., КРИВОРУЧКО Ю.Т., МАКСИМЕНКО М.Д., МЯСНИКОВ С.А., СИНИЦЫН В.А., СИНИЦЫН Е.А | |||
| Радиомаячная система инструментального захода воздушных судов на посадку II категории дециметрового диапазона волн ПРМГ-ОМД // Библиотека журнала | |||

