Изобретение относится к области навигации и может быть использовано в навигационных комплексах летательных аппаратов, преимущественно многоцелевых истребителей и вертолетов.
Известно устройство коррекции инерциальной спутниковой навигационной системы по показаниям спутниковой навигационной системы, содержащее спутниковую навигационную систему, инерциальную навигационную систему и блок сравнения их выходных сигналов по трем координатам места и трем составляющим вектора линейной скорости подвижного объекта, отличающееся тем, что в него введены последовательно соединенные блок памяти, блок определения угловых погрешностей, блок определения уходов гироскопов, а также командно-временный блок, при этом первый и второй входы блока памяти связаны соответственно с выходами блока инерциальной навигационной системы и блока сравнения, а первый и второй выходы блока памяти связаны соответственно с первым входом блока инерциальной навигационной системы и с первым входом блока оценки угловых погрешностей, выход блока оценки угловых погрешностей связан с вторым входом инерциальной навигационной системы и с первым входом блока оценки уходов гироскопов, блок оценки уходов гироскопов связан с третьим входом инерциальной навигационной системы, выход командно-временного блока связан с четвертым входом инерциально-навигационной системы, третьим входом блока сравнения и вторыми входами блока оценки уходов гироскопов и блока оценки угловых параметров [1].
Известна комплексная навигационная система, содержащая инерциальную навигационную систему (ИНС), спутниковую навигационную систему (СНС), пульт управления и ввода (ПУВ) и бортовую цифровую вычислительную машину (БЦВМ), отличающаяся тем, что в ее состав дополнительно введен инерциальный измерительный блок (ИИБ), связанный с входом-выходом БЦВМ [2]. Комплексная навигационная система [2] отличается также тем, что в ее состав дополнительно введены устройство запоминания погрешностей ИНС (УЗ-ИНС), связанное по входу с ПУВ, устройство компенсации погрешностей ИНС (УК-ИНС), связанное по входам с ИНС и УЗ-ИНС и устройство преобразования сигналов ИНС, связанное по входам с ИНС, УЗ-ИНС и УК-ИНС, а по выходу - с БЦВМ.
Известна инерциально-спутниковая система, содержащая спутниковый датчик скорости, последовательно соединенный по первому и второму входам-выходам инерциальный датчик скорости и курса, блок коррекции составляющих скорости, блок переключения, блок корректирующих фильтров, первый и второй выходы которого подключены соответственно к третьему и четвертому входам блока коррекции составляющих скорости, на пятый и шестой входы которого подключены соответственно первый и второй выходы спутникового датчика скорости, третий выход которого подключен к третьему входу блока переключения, отличающаяся тем, что в нее дополнительно введены четыре блока формирования приращения скорости, блок формирования погрешностей составляющих скорости и блок коррекции курса, на первый, второй, третий, четвертый, пятый и шестой входы которого подключены соответственно выходы третьего, четвертого, первого и второго блоков формирования приращения скорости, третий выход спутникового датчика скорости и третий выход инерциального датчика скорости и курса, первый и второй выходы которого подключены соответственно к входам первого и второго блоков формирования приращений, а первый и второй выходы спутникового датчика скорости подключены соответственно к входам третьего и четвертого блоков формирования приращения, причем на седьмой и восьмой входы блока коррекции составляющих скорости подключены соответственно первый и второй выходы блока формирования погрешностей составляющих скорости, на первый, второй, третий, четвертый, пятый, шестой и седьмой входы которого подключены соответственно первый, второй и третий выходы спутникового датчика скорости, первый и второй выходы блока коррекции курса, третий и четвертый выходы блока коррекции составляющих скорости [3].
Известен также комбинированный навигационный комплекс [4], являющийся по технической сущности наиболее близким к предлагаемому. Комплекс-прототип содержит спутниковую навигационную систему, инерциальную навигационную систему, навигационный вычислитель, регистратор навигационной информации, вычислитель погрешностей инерциальной навигационной системы, энергонезависимое запоминающее устройство, вычислитель поправок к составляющим скорости и азимутальному углу гироплатформы инерциальной навигационной системы.
Недостатком аналогов и известного навигационного комплекса, принятого за прототип, является недостаточная точность определения навигационных параметров в условиях отсутствия достоверной информации от спутниковой навигационной системы (в условиях воздействия помех, при затенении антенн в условиях интенсивного маневрирования летательного аппарата, неработоспособности спутников и др.).
Технический результат от использования предлагаемого технического решения заключается в повышении точности определения навигационных параметров, помехозащищенности и отказоустойчивости навигационного комплекса летательного аппарата.
Сущность изобретения заключается в том, что навигационный комплекс летательного аппарата, содержащий спутниковую навигационную систему, навигационный вычислитель, регистратор навигационной информации, энергонезависимое запоминающее устройство, дополнительно содержит доплеровский измеритель скорости и угла сноса, вычислитель погрешностей доплеровского измерителя и датчика курса, компенсатор погрешностей доплеровского измерителя и датчика курса, датчик курса, систему воздушных сигналов, при этом выход спутниковой навигационной системы соединен с первым входом навигационного вычислителя и первым входом регистратора навигационной информации, выход доплеровского измерителя скорости и угла сноса соединен со вторым входом навигационного вычислителя, вторым входом регистратора навигационной информации и первым входом компенсатора погрешностей доплеровского измерителя и датчика курса, выход датчика курса соединен с третьим входом навигационного вычислителя, третьим входом регистратора навигационной информации и вторым входом компенсатора погрешностей доплеровского измерителя и датчика курса, выход системы воздушных сигналов соединен с четвертым входом навигационного вычислителя и четвертым входом регистратора навигационной информации, выход регистратора навигационной информации соединен с входом вычислителя погрешностей доплеровского измерителя и датчика курса, выход которого соединен с входом энергонезависимого запоминающего устройства, выход энергонезависимого запоминающего устройства соединен с третьим входом компенсатора погрешностей доплеровского измерителя и датчика курса, выход компенсатора погрешностей доплеровского измерителя и датчика курса соединен с пятым входом навигационного вычислителя, выход которого является выходом навигационной информации.
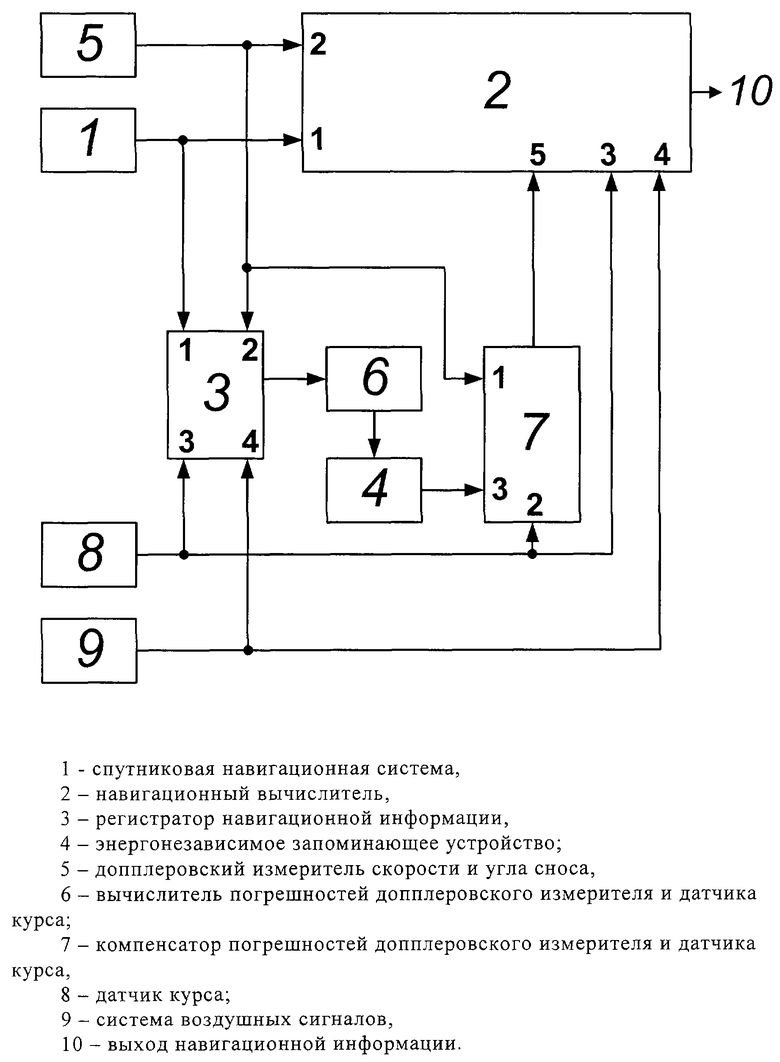
Сущность изобретения поясняется чертежом, на котором приведена функциональная схема навигационного комплекса летательного аппарата. На чертеже обозначено:
1 - спутниковая навигационная система;
2 - навигационный вычислитель;
3 - регистратор навигационной информации;
4 - энергонезависимое запоминающее устройство;
5 - доплеровский измеритель скорости и угла сноса;
6 - вычислитель погрешностей доплеровского измерителя и датчика курса;
7 - компенсатор погрешностей доплеровского измерителя и датчика курса;
8 - датчик курса;
9 - система воздушных сигналов;
10 - выход навигационной информации.
Навигационный комплекс летательного аппарата содержит спутниковую навигационную систему 1, навигационный вычислитель 2, регистратор 3 навигационной информации, энергонезависимое запоминающее устройство 4, дополнительно содержит доплеровский измеритель 5 скорости и угла сноса, вычислитель 6 погрешностей доплеровского измерителя и датчика курса, компенсатор 7 погрешностей доплеровского измерителя и датчика курса, датчик 8 курса, систему 9 воздушных сигналов, при этом выход спутниковой навигационной системы 1 соединен с первым входом навигационного вычислителя 2 и первым входом регистратора 4 навигационной информации, выход доплеровского измерителя 5 скорости и угла сноса соединен со вторым входом навигационного вычислителя 2, вторым входом регистратора 3 навигационной информации и первым входом компенсатора 7 погрешностей доплеровского измерителя и датчика курса, выход датчика 8 курса соединен с третьим входом навигационного вычислителя 2, третьим входом регистратора 3 навигационной информации и вторым входом компенсатора 7 погрешностей доплеровского измерителя и датчика курса, выход системы 9 воздушных сигналов соединен с четвертым входом навигационного вычислителя 2 и четвертым входом регистратора 3 навигационной информации, выход регистратора 3 навигационной информации соединен с входом вычислителя 6 погрешностей доплеровского измерителя и датчика курса, выход которого соединен с входом энергонезависимого запоминающего устройства 4, выход энергонезависимого запоминающего устройства 4 соединен с третьим входом компенсатора 7 погрешностей доплеровского измерителя и датчика курса, выход компенсатора 7 погрешностей доплеровского измерителя и датчика курса соединен с пятым входом навигационного вычислителя 2, выход которого является выходом 10 навигационной информации.
Навигационный вычислитель 2, вычислитель 6 погрешностей доплеровского измерителя и датчика курса, компенсатор 7 погрешностей доплеровского измерителя и датчика курса представляют собой бортовые электронно-вычислительные машины. Функции навигационного вычислителя 2, вычислителя 6 погрешностей доплеровского измерителя и датчика курса, компенсатора 7 погрешностей доплеровского измерителя и датчика курса могут выполняться также одной бортовой электронно-вычислительной машиной, работающей в многозадачном режиме, в качестве которой может быть использован вычислитель, аналогичный бортовым вычислителям в изобретении [4].
Навигационный вычислитель 2 предназначен для осуществления во время полета летательного аппарата обработки навигационной информации, поступающей от доплеровского измерителя 5 скорости и угла сноса, от спутниковой навигационной системы 1, от датчика 8 курса и от системы 9 воздушных сигналов. При этом осуществляется коррекция курсодоплеровского счисления по данным спутниковой навигационной системы 2.
Результатом обработки навигационной информации в навигационном вычислителе 2 являются данные о географических координатах (широте ϕ и долготе λ) летательного аппарата, данные о составляющих скоростей летательного аппарата (северной Vn и восточной Ve), данные о курсе летательного аппарата (ψист).
Регистратор 3 навигационной информации представляет собой накопитель информации, в который на протяжении всего полета записываются данные, поступающие от доплеровского измерителя 5 скорости и угла сноса, спутниковой навигационной системы 1, датчика 8 курса и системы воздушных сигналов 9. По окончании полета эти данные используются вычислителем 6 погрешностей доплеровского измерителя и датчика курса. Также эти данные могут по окончании полета использоваться для анализа работы доплеровского измерителя 5 скорости и угла сноса, спутниковой навигационной системы 1, датчика 8 курса и системы воздушных сигналов 9.
Вычисленные вычислителем 6 погрешностей доплеровского измерителя и датчика курса погрешности заносятся в энергонезависимое запоминающее устройство 4, в котором эти данные хранятся до следующего полета.
Компенсатор 7 погрешностей доплеровского измерителя и датчика курса на основании информации о погрешностях доплеровского измерителя 5 скорости и угла сноса и датчика 8 курса, хранящейся в энергонезависимом запоминающем устройстве 4, вычисляет поправки, которые используются им для корректировки данных, поступающих от доплеровского измерителя 5 скорости и угла сноса и датчика 8 курса.
В качестве спутниковой навигационной системы 1 может использоваться приемник спутниковой навигационной системы Navstar или Глонасс или приемник, обеспечивающий прием сигналов спутников и системы Navstar, и системы Глонасс.
В качестве датчика 8 курса может использоваться, например, гирокомпас.
Для связи спутниковой навигационной системы 1 доплеровского измерителя 5 скорости и угла сноса, датчика 8 курса, системы 9 воздушных сигналов с навигационным вычислителем 2, регистратором 3 навигационной информации и компенсатором 7 погрешностей доплеровского измерителя и датчика курса могут использоваться цифровые интерфейсы, например RS-232, RS-485, MIL-STD-1553, Arinc и т.д., обеспечивающие передачу всех необходимых данных через соответствующие входы и выходы, или могут использоваться наборы аналоговых линий связи. В случае использования аналоговых линий связи навигационный вычислитель 2, регистратор 3 навигационной информации и компенсатор 7 погрешностей доплеровского измерителя и датчика курса содержат аналого-цифровые преобразователи.
Навигационный комплекс летательного аппарата работает следующим образом.
Данные о модуле скорости W и данные об угле сноса УС от доплеровского измерителя 5 скорости и угла сноса поступают на вторые входы навигационного вычислителя 2 и регистратора 3 навигационной информации, данные о курсе летательного аппарата ψГПК от датчика 8 курса поступают на третьи входы навигационного вычислителя 2 и регистратора 3 навигационной информации, данные о высоте полета летательного аппарата H от системы 9 воздушных сигналов поступают на четвертые входы навигационного вычислителя 2 и регистратора 3 навигационной информации. Данные о географической широте ϕ, о географической долготе λ, о составляющих относительных скоростей летательного аппарата (скоростей летательного аппарата относительно Земли) Vn (северная составляющая), Ve (восточная составляющая), данные о текущем времени и признак достоверности данных спутниковой навигационной системы 1 с выхода спутниковой навигационной системы 1 поступают на первые входы навигационного вычислителя 2 и регистратора 3 навигационной информации.
Навигационный вычислитель 2 на основании данных, полученных от доплеровского измерителя 5 скорости и угла сноса, датчика 8 курса и системы 9 воздушных сигналов, производит вычисление координат местоположения летательного аппарата (производит интегрирование составляющих скоростей).
Затем производится комплексная обработка навигационных данных, полученных от доплеровского измерителя 5 скорости и угла сноса, датчика 8 курса и спутниковой навигационной системы 1. При этом учитывается, что данные спутниковой навигационной системы 1 являются более точными и их точность не зависит от продолжительности полета, но при этом в них присутствуют высокочастотные помехи и возможны ситуации неработоспособности спутниковой навигационной системы 1 из-за присутствия радиопомех, затенения антенны в условиях интенсивного маневрирования летательного аппарата и других причин. При неработоспособности спутниковой навигационной системы 1 работа навигационного комплекса осуществляется только на основании данных от доплеровского измерителя 5 скорости и угла сноса и датчика 8 курса с компенсацией их погрешностей, оценки которых получены на предшествующих участках работы спутниковой навигационной системы 1.
На протяжении всего полета регистратор 3 навигационной информации осуществляет запись данных, полученных от доплеровского измерителя 5 скорости и угла сноса, от спутниковой навигационной системы 1, от датчика 8 курса и от системы 9 воздушных сигналов.
Вычисление координат местоположения летательного аппарата (интегрирования составляющих скоростей) в навигационном вычислителе 2 по данным доплеровского измерителя 5 скорости и угла сноса, датчика 8 курса и системы 9 воздушных сигналов осуществляется следующим образом.
Перед полетом в навигационный вычислитель 2 вводятся координаты местоположения ϕ0, λ0 и стояночный курс летательного аппарата  (начальное значение истинного курса летательного аппарата ψист). Составляющие скорости при курсодоплеровском счислении
(начальное значение истинного курса летательного аппарата ψист). Составляющие скорости при курсодоплеровском счислении  формируются в соответствии со следующими соотношениями:
формируются в соответствии со следующими соотношениями:


Истинный курс ψист в полете вычисляется по данным датчика 8 курса (ψгпк) с учетом угла сходимости меридианов Δψм:
ψист=ψгпк+ΔψМ.
Координаты местоположения летательного аппарата формируются в соответствии со следующими соотношениями:
Вычисляются радиусы кривизны меридиана Rm и первого вертикала Rn:
где a - большая полуось земного эллипсоида (a=6378245 м), e2 - квадрат первого эксцентриситета (e2=0,0066934216).
После окончания полета вычислителем 6 погрешностей доплеровского измерителя и датчика курса производится комплексная обработка данных, собранных во время полета в регистраторе 3 навигационной информации. В процессе этой обработки производится расчет следующих погрешностей доплеровского измерителя 5 скорости и угла сноса и датчика 8 курса:
Kw - погрешность доплеровского измерителя 5 скорости и угла сноса в определении модуля скорости, пропорциональная измеряемому параметру;
Кус - погрешность доплеровского измерителя 5 скорости и угла сноса в определении угла сноса, пропорциональная измеряемому параметру;
Δψ0 - погрешность определения стояночного курса летательного аппарата, обусловленная погрешностями взаимной установки выставочного устройства относительно антенны доплеровского измерителя 5 скорости и угла сноса, погрешностями определения азимута ориентира и др.;
ωдр - угловая скорость дрейфа гироскопа датчика 8 курса.
Исходными данными для определения указанных параметров являются значения, полученные при определении составляющих скорости в режиме курсодоплеровского счисления ( и
и  , рассчитанные по формулам (1)-(2)) и данные, полученные от спутниковой навигационной системы 1 (
, рассчитанные по формулам (1)-(2)) и данные, полученные от спутниковой навигационной системы 1 ( ,
,  ).
).
Результаты множества измерений модуля скорости W, угла сноса УС, курса летательного аппарата ψГПК и высоты полета летательного аппарата Н подставляются в следующие соотношения:


где Δψист=Δψ0+ωдрТраб, ПУ=ψист-УС, Траб - время, прошедшее с момента начала счисления.
В результате подстановки результатов измерений в выражения (7)-(8) можно получить систему уравнений с параметрическими коэффициентами, зависящими от модуля скорости W, путевого угла ПУ и угла сноса УС. Из приведенных соотношений следует, что наблюдаемость погрешностей истинного курса и угла сноса и их разделение обеспечивается при изменении угла сноса УС.
Обработка результатов измерений может производиться различными математическими методами, в том числе известными методами комплексной оптимальной обработки информации, например с использованием фильтра Калмана [5]. При этом расчеты производятся как в прямом, так и обратном времени.
Результаты расчета величин Kw, Кус, Δψ0, ωдр из вычислителя 6 погрешностей доплеровского измерителя и датчика курса поступают в энергонезависимое запоминающее устройство 4.
В последующих полетах при формировании действительных значений параметров (Wд, ψгпк д, УСд) компенсатором 7 производится компенсация погрешностей доплеровского измерителя и датчика курса с учетом запомненных значений погрешностей:



При этом компенсатор 7 погрешностей доплеровского измерителя и датчика курса использует данные о модуле скорости W и данные об угле сноса УС, поступающие от доплеровского измерителя 5 скорости и угла сноса на первый вход компенсатора 7, данные о курсе летательного аппарата ψгпк от датчика 8 курса, поступающие на второй вход компенсатора 7, и данные о вычисленных погрешностях Кw, Kус, Δψ0, ωдр, поступающие на третий вход компенсатора 7 из долговременного запоминающего устройства 4.
Составляющие скорости и координаты местоположения летательного аппарата формируются навигационным вычислителем 2 в соответствии с отношениями (1)-(4) с использованием действительных значений Wд, УСд, ψгпкд, поступающих от компенсатора 7 погрешностей доплеровского измерителя и датчика курса на пятый вход навигационного вычислителя 2 (вместо значений модуля скорости W и угла сноса УС от доплеровского измерителя 5 скорости и угла сноса, поступающих на второй вход навигационного вычислителя 2, и значения курса летательного аппарата ψГПК, поступающегоот датчика 8 курса на третий навигационного вычислителя 2).
Предварительная оценка результатов эффективности использования изобретения в навигационном комплексе вертолета показала, что реализация изобретения позволяет уменьшить погрешности курсодоплеровского счисления координат в полете в 2-3 раза.
Таким образом, в результате использования предлагаемого изобретения достигается технический результат, заключающийся в повышении точности определения навигационных параметров, помехозащищенности и отказоустойчивости навигационного комплекса летательного аппарата.
Представленные чертежи и описание предлагаемого изобретения позволяют, используя существующую элементную базу, изготовить его промышленным способом и использовать в навигационных системах летательных аппаратов: многофункциональных истребителей, вертолетов и т.п., что характеризует предлагаемое изобретение как промышленно применимое.
Источники информации
1. Свидетельство РФ 1530 на ПМ, МПК G 01 C 21/24, опубл. 16.01.1996 г.
2. Свидетельство РФ 15604 на ПМ, МПК G 01 C 23/00, опубл. 27.10.2000 г.
3. Патент РФ №2073210 на изобретение, МПК G 01 С 21/00, опубл. 10.02.1997 г.
4. Патент РФ №2170410 на изобретение, МПК G 01 С 23/00, опубл. 10.01.2001 г. (прототип).
5. Летные испытания пилотажно-навигационных комплексов самолетов и вертолетов. Е.Г.Харин и др. М.: Машиностроение, 1985, с.51-59.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННАЯ СИСТЕМА НАВИГАЦИИ | 2003 |
|
RU2229686C1 |
| КОМПЛЕКС НАВИГАЦИИ И ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2003 |
|
RU2215995C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170410C1 |
| АЭРОГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2090911C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КУРСА | 2023 |
|
RU2809659C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КУРСА | 2000 |
|
RU2178146C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2293950C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2077028C1 |
Изобретение относится к области навигации и может быть использовано в навигационных комплексах летательных аппаратов, преимущественно многоцелевых истребителей и вертолетов. Навигационный комплекс летательного аппарата содержит спутниковую навигационную систему, навигационный вычислитель, регистратор навигационной информации, энергонезависимое запоминающее устройство, доплеровский измеритель скорости и угла сноса, вычислитель погрешностей доплеровского измерителя и датчика курса, компенсатор погрешностей доплеровского измерителя и датчика курса, датчик курса, систему воздушных сигналов. Данные конструктивные элементы навигационного комплекса соединены между собой соответствующим образом. Технический результат состоит в повышении точности определения навигационных параметров, помехозащищенности и отказоустойчивости навигационного комплекса летательного аппарата. 1 ил.
Навигационный комплекс летательного аппарата, содержащий спутниковую навигационную систему, навигационный вычислитель, регистратор навигационной информации, энергонезависимое запоминающее устройство, отличающийся тем, что дополнительно содержит доплеровский измеритель скорости и угла сноса, вычислитель погрешностей доплеровского измерителя и датчика курса, компенсатор погрешностей доплеровского измерителя и датчика курса, датчик курса, систему воздушных сигналов, при этом выход спутниковой навигационной системы соединен с первым входом навигационного вычислителя и первым входом регистратора навигационной информации, выход доплеровского измерителя скорости и угла сноса соединен со вторым входом навигационного вычислителя, вторым входом регистратора навигационной информации и первым входом компенсатора погрешностей доплеровского измерителя и датчика курса, выход датчика курса соединен с третьим входом навигационного вычислителя, третьим входом регистратора навигационной информации и вторым входом компенсатора погрешностей доплеровского измерителя и датчика курса, выход системы воздушных сигналов соединен с четвертым входом навигационного вычислителя и четвертым входом регистратора навигационной информации, выход регистратора навигационной информации соединен с входом вычислителя погрешностей доплеровского измерителя и датчика курса, выход которого соединен с входом энергонезависимого запоминающего устройства, выход энергонезависимого запоминающего устройства соединен с третьим входом компенсатора погрешностей доплеровского измерителя и датчика курса, выход компенсатора погрешностей доплеровского измерителя и датчика курса соединен с пятым входом навигационного вычислителя, выход которого является выходом навигационной информации.
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170410C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КУРСА | 2000 |
|
RU2178146C1 |
| Аппарат для наполнения термометров ртутью | 1929 |
|
SU14364A1 |
| RU 2073210 C1, 10.02.1997 | |||
| US 3630079 A, 28.12.1971 | |||
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2168704C1 |

