Изобретение относится к кистевому протезу с основанием, на котором с возможностью движения посредством привода вокруг, по меньшей мере, одной оси поворота шарнирно установлен, по меньшей мере, один пальцевый протез.
После ампутации кисти или ее полного отделения от руки в результате несчастного случая внешний вид и частично функция кисти могут быть восстановлены посредством кистевого протеза. Для этого он должен быть способен перемещать по отношению друг к другу захватные устройства, которые могут быть выполнены в виде имитаций пальцев, чтобы обеспечить взятие предмета.
Помимо двухпальцевого захвата, известного из US 2004/0015240 А1, предложены кистевые протезы, располагающие приводом, который через коническую зубчатую передачу жестко соединен с основанием кисти. При этом в зависимости от направления вращения привода пальцевые протезы сходятся или расходятся. Этот привод может управляться миоэлектрическими сигналами. Такой кистевой протез описан в US 2005/0021154 А1. Он мало напоминает естественную кисть.
Задачей настоящего изобретения является создание кистевого протеза, который имел бы приближенную к внешнему виду естественной кисти форму и улучшенную функциональность.
Согласно изобретению эта задача решается посредством кистевого протеза с признаками п.1 формулы. Предпочтительные варианты и модификации изобретения описаны в зависимых пунктах.
Кистевой протез с основанием, на котором, по меньшей мере, один пальцевый протез шарнирно установлен с возможностью движения вокруг, по меньшей мере, одной оси поворота посредством привода, соединенного с ним через устройство для передачи усилий, предусматривает, что в основании расположен первый привод, который через устройство для передачи усилий связан с пальцевым протезом и обеспечивает поворот вокруг первой оси поворота. В пальцевом протезе расположен второй привод, который обеспечивает поворот, по меньшей мере, части пальцевого протеза вокруг второй оси поворота относительно первой оси поворота. За счет этого может очень хорошо имитироваться комплексное движение пальцев без необходимости чрезмерного увеличения кистевого протеза как такового или использования сложного механизма, с помощью которого посредством центрального привода выполняются различные движения. Предпочтительно приводы развязаны друг от друга, чтобы управлять соответствующими компонентами и перемещать их независимо друг от друга.
Один вариант осуществления изобретения предусматривает, что устройство для передачи усилий между приводом и пальцевым протезом выполнено податливым при нажиме или изгибно-упругим и жестким на растяжение. В то время как традиционные кистевые протезы предусматривают жесткую связь между приводом и пальцевым протезом, податливая при нажиме или изгибно-упругая связь привода с пальцевым протезом обеспечивает то, что при сжимающей нагрузке на устройство для передачи усилий, т.е. при воздействии усилия, вызывающего смыкание пальцевых протезов или уменьшение угла между пальцевым протезом и основанием кисти, пальцевый протез подается и помимо имитации естественного пальца вызывает также защиту механических компонентов. Защита компонентов обусловлена тем, что на привод косвенно через устройство для передачи усилий передаются порой значительные усилия, возникающие при случайном ударе пальцевых протезов о предметы. Напротив, благодаря изгибно-упругому, преимущественно спружинивающему выполнению устройства для передачи усилий обеспечиваются смещение и преобразование действующих на пальцевый протез усилий в движение. Это движение может продолжаться вплоть до максимального угла изгиба пальцевого протеза. Один вариант осуществления изобретения предусматривает, что устройство для передачи усилий содержит эластомерный компонент, благодаря которому в широком диапазоне можно регулировать изгибную упругость устройства для передачи усилий. За счет подходящего выбора эластомерного материала, который предпочтительно, по меньшей мере, частично охватывает или полностью размещает в себе тросовый, волокнистый компонент или прядь, возможно изготовление формоустойчивого в исходном положении тела, которое, с одной стороны, благодаря включенному тросовому или волокнистому компоненту обладает очень высокими растягивающими усилиями, а с другой стороны, благодаря эластомерному компоненту - желаемой изгибно-упругой и упругой при сжатии характеристикой. Тросовый, волокнистый компонент или прядь выполнен в виде закрытой, открытой или скрученной петли.
В качестве альтернативы устройство для передачи усилий может быть выполнено в виде пружиняще-демпфирующего блока, в частности в виде пневмоблока, в котором в случае сжимающей нагрузки сжимается воздушный объем, который после снятия сжимающего усилия расширяется и вызывает обратное смещение пневмопоршня и, тем самым, пальцевого протеза.
Для связи устройства для передачи усилий с приводом и пальцевым протезом предусмотрены опорные втулки, заделанные в устройство для передачи усилий. Предпочтительно эти опорные втулки окружены эластомерным элементом или эластомерным компонентом и находятся внутри тросового или волокнистого компонента, в частности внутри тросовой или волокнистой петли. Чтобы реализовать возвратное движение пальцевого протеза, согнутого в направлении внутренней поверхности основания кисти, устройство для передачи усилий выполнено пружиняще-упругим, так что пальцевый протез без нагружения растягивающим усилием за счет привода или связанного с ним передаточного элемента возвращается в исходное положение. Оно соответствует предпочтительно слегка раскрытой кисти. Таким образом, устройство для передачи усилий способно передавать ограниченное сжимающее усилие. За счет соответствующего сочленения или выполнения устройства для передачи усилий может быть обеспечено небольшое избыточное выпрямление пальцевых протезов из основного положения. Спружинивание устройства для передачи усилий рассчитано при этом так, что при его нагружении сжимающим усилием, т.е. при повороте пальцевого протеза в направлении внутренней поверхности основания кисти, происходит возврат пальцевого протеза в исходное положение. Возвратное усилие должно быть при этом настолько высоким, чтобы преодолеть удерживающие силы и силы трения внутри кистевого протеза. Устройство для передачи усилий от привода кистевого протеза на шарнирно установленный на основании кисти пальцевый протез выполнено, как это описано выше, и обеспечивает легкую и недорогую связь привода и пальцевого протеза, а также эффективную передачу растягивающих усилий. Кроме того, с помощью устройства для передачи усилий достигаются податливая против случайной нагрузки опора и простой возврат в исходное положение.
Приводы могут быть выполнены в виде электродвигателей, причем первый привод выполнен в виде относительно большого, низкооборотного электродвигателя с плоским ротором, используемого для смещения пальцевого протеза относительно основания кисти. Расположенные в соответствующих пальцевых протезах вторые приводные двигатели предназначены для сгибания пальцев или для выполнения направленного к внутренней поверхности кисти движения.
Чтобы иметь в распоряжении достаточно места для размещения второго привода, он расположен в зоне проксимальной фаланги естественного пальца, причем предпочтительное применение следует видеть в протезе большого пальца, поскольку основная фаланга большого пальца толще, чем основные фаланги остальных пальцев, благодаря чему для размещения привода в распоряжении имеется больше места.
Поскольку конструктивное пространство для второго привода ограничено, используются предпочтительно малогабаритные высокооборотные электродвигатели. Чтобы создать достаточное усилие перемещения, второй привод содержит передачу, в частности винтовую зубчатую передачу, связанную с ведомым элементом. Между высокооборотным приводом и ведомым элементом уже происходит первое редуцирование, так что ведомый элемент вращается с существенно меньшей частотой вращения, чем привод. Благодаря этому можно помимо отклонения направления вращения создать также более высокий приводной момент.
Сам ведомый элемент может быть выполнен в виде червяка, который находится в зацеплении с сегментом зубчатого колеса, так что ведомый элемент образует с сегментом зубчатого колеса червячную передачу. Во избежание нежелательного смещения второго привода вместе с червячной передачей вокруг второй оси поворота эта червячная передача выполнена самостопорящейся.
Чтобы обеспечить составное движение ориентированных предпочтительно под углом друг к другу первой и второй осей поворота, второй привод установлен с возможностью поворота на сегменте зубчатого колеса, который, в свою очередь, установлен на основании с возможностью поворота вокруг первой оси поворота. Таким образом, пальцевый протез может поворачиваться вокруг двух осей, причем весь привод вместе с червячной передачей установлен с возможностью поворота вокруг первой оси поворота, тогда как для реализации второго движения предусмотрен лишь поворот вокруг оси на сегменте зубчатого колеса. Угловое расположение осей по отношению друг к другу может быть изменено в результате поворота за счет второго привода с целью реализации либо бокового хвата, нейтрального положения без хватательной функции, внешне оставляющего впечатление естественности, либо хвата щепотью.
Ниже со ссылкой на прилагаемые чертежи более подробно поясняется пример осуществления изобретения. Одинаковые элементы на разных фигурах обозначены одинаковыми ссылочными позициями. На чертежах изображают:
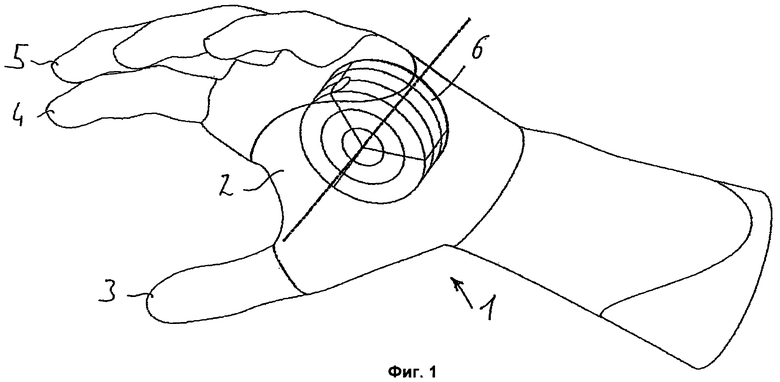
- фиг.1: схематичный вид кистевого протеза;
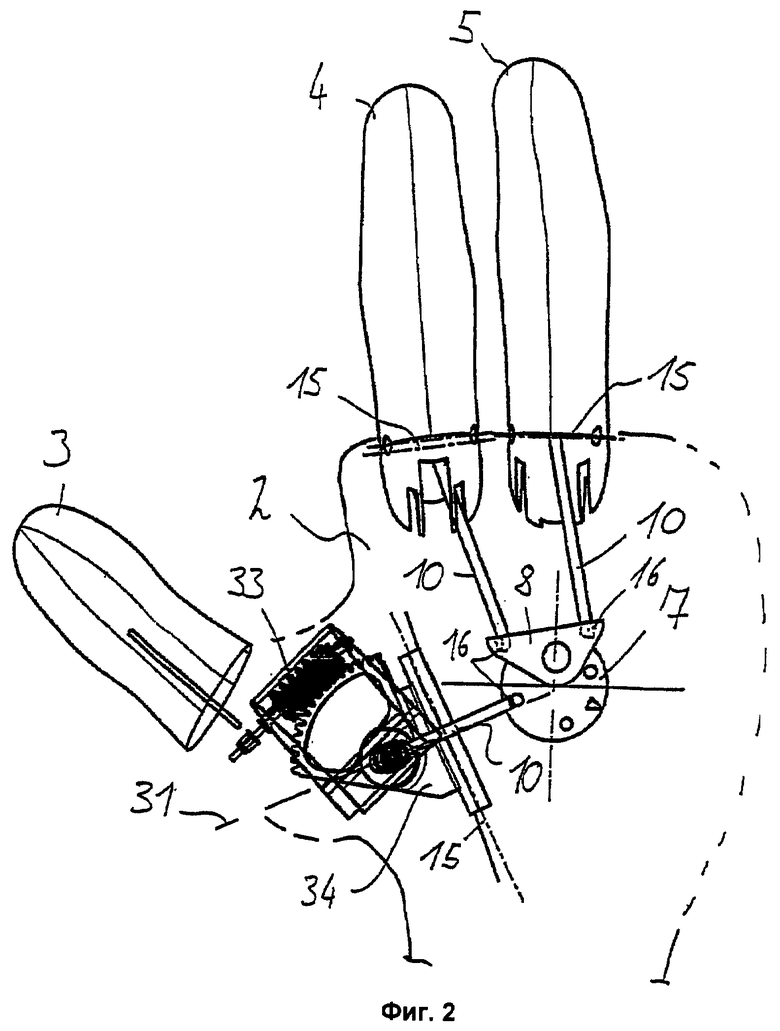
- фиг.2: схематичный частичный вид функционального строения кистевого протеза;
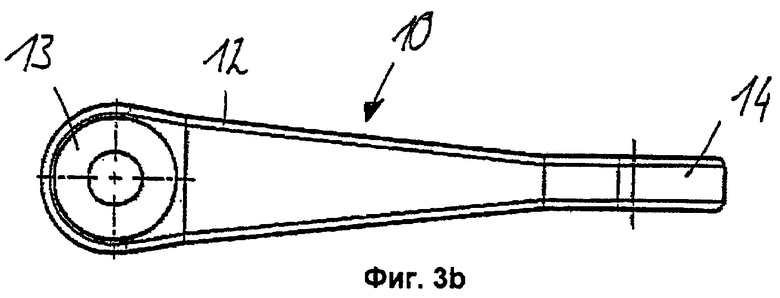
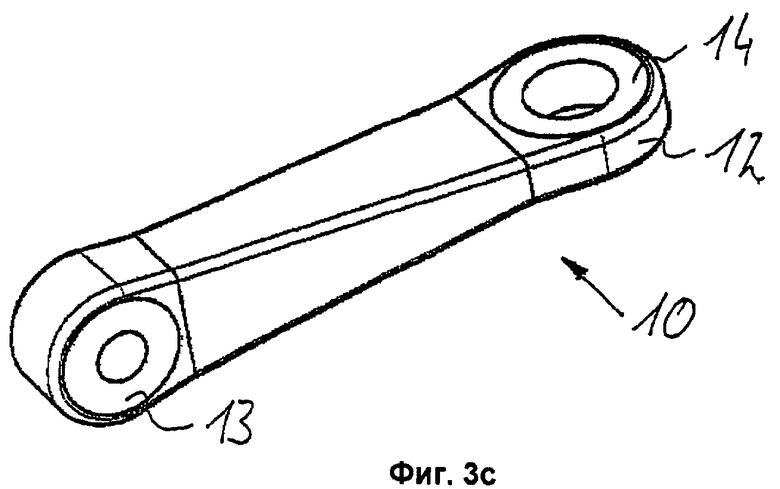
- фиг.3а-3с: устройство для передачи усилий в разных видах;
- фиг.4: функциональное строение пальцевого протеза.
На фиг.1 изображен кистевой протез 1, состоящий из основания 2 и, по меньшей мере, трех шарнирно установленных на основании 2 пальцевых протезов 3, 4, 5. Они соответствуют большому, указательному и среднему пальцам естественной кисти. Подвижной и активируемой посредством привода 6 опоры этих трех пальцевых протезов 3, 4, 5 достаточно для выполнения кистью большого числа хватательных функций. Оба остальных пальца, безымянный и мизинец, могут двигаться пассивно заодно с ними и состоять из эластомерного материала для достижения как можно более естественного внешнего вида. Внутри основания 2 установлен привод 6 в виде электропривода, например электродвигателя с плоским ротором, с соответствующей передачей. Также внутри основания 2 может быть расположен источник энергии для привода 6. Управление приводом 6 осуществляется блоком управления, который также может быть расположен в основании 2. Соответствующие сигналы могут вырабатываться посредством дистанционного управления или представлять собой миоэлектрические сигналы.
На фиг.2 схематично показан принцип действия кистевого протеза 1. На основании 2 с возможностью поворота вокруг шарнирных осей 15 установлены три пальцевых протеза 3, 4, 5. Посредством устройств 10 для передачи усилий, конструкция которых подробно описана ниже, пальцевые протезы 3, 4, 5 соединены с вращающимся диском 7, приводимом электродвигателем 6. Устройства 10 установлены на вращающемся диске 7 на осях 16 либо непосредственно, либо посредством балансира 8. Указательный 4 и средний 5 пальцы связаны между собой посредством балансира 8, установленного с возможностью вращения на вращающемся диске 7. Последний установлен непосредственно на ведомом валу привода 6 или на выходном валу редуктора. При активировании привода 6 вращающийся диск 7 движется на соответствующий угол. В результате оси 16 смещаются относительно осей 15 поворота пальцевых протезов 3, 4, 5, что за счет жесткого на растяжение выполнения устройств 10 и отстоящего от осей 15 вращения сочленения устройств 10 с пальцевыми протезами 3, 4, 5 приводит к повороту последних. При реверсировании привода 6 и движении вращающегося диска 7 в положение, в котором оси 16 минимально удалены от осей 15 поворота пальцевых протезов 3, 4, 5, достигается раскрытое исходное положение. За счет пружиняще-упругих свойств устройств 10 пальцевые протезы 3, 4, 5 движутся тогда в свое раскрытое исходное положение. При этом предусмотрено, что устройства 10 могут передавать растягивающие усилия, существенно более высокие, чем сжимающие усилия. Это соответствует физиологическим условиям естественной кисти, которая при закрывании может прикладывать существенно большие усилия, чем при раскрывании. Для наглядности безымянный палец и мизинец не показаны; они могут быть пассивно сочленены со средним пальцем 5 и за счет этого двигаться заодно с ним.
На фиг.2 видно также, что протез 3 большого пальца помимо первой оси 15 поворота имеет вторую ось 31 поворота, с возможностью движения вокруг которой установлен, по меньшей мере, дистальный конец протеза 3. Посредством изображенного только на фиг.4 второго привода 30 и винтовой зубчатой передачи 32 движется ведомый червяк 33, который находится в зацеплении с сегментом 34 зубчатого колеса и вызывает, таким образом, смещение протеза 3 с приводом 30 и передачей 32 вокруг оси 31 поворота. При одновременном активировании обоих приводов 6, 30 в соответствии со скоростями смещения совершается комбинированное пальмарно-ульнарное движение протеза 3, что соответствует естественной подвижности большого пальца.
На фиг.3 в разрезе изображено устройство 10 для передачи усилий. Оно состоит из тросового или волокнистого компонента 11, выполненного в данном случае в виде петли. Тросовый компонент 11 может состоять из нескольких прядей или отдельных петель или в виде стального или пластикового троса из другого высокопрочного волокнистого материала. Тросовый компонент 11 заделан в эластомерный компонент 12, в результате чего устройство 10 является формоустойчивым, однако изгибно-упругим. Эластомерный компонент 12 может состоять из силикона, каучука или другого эластичного материала. Несмотря на формоустойчивость за счет изгибаемости тросового или волокнистого компонента 11 и упругой при сжатии или изгибно-упругой характеристики эластомерного компонента 12 возможна деформация, в частности изгибание, на основе действующих на устройство 10 сжимающих усилий. В результате связанные с приводом 6 или вращающимся диском 7 посредством устройства 10 пальцевые протезы 3, 4, 5 могут смещаться в направлении внутренней поверхности основания кисти, причем при отсутствии соответствующего встречного усилия происходит обратное смещение за счет пружиняще-упругой характеристики устройств 10.
Внутри выполненного в виде петли тросового или волокнистого компонента 11 расположены две опорные втулки 13, 14, которые также заделаны в эластомерный компонент 12, например силикон. Опорные втулки 13, 14 установлены на соответствующих осях пальцевых протезов 3, 4, 5 и на осях 16 вращающегося диска 7 или балансира 8. Опорные втулки 13, 14 выполнены, например, из бронзы для образования опоры скольжения с соответствующими осями 16. Для наглядности связующие оси пальцевых протезов 3, 4, 5 не показаны. Эти связующие оси расположены на расстоянии от осей 15 вращения, так что при приложении растягивающих усилий через устройства 10 создается момент вокруг осей 15 вращения, что приводит к соответствующему смещению пальцевых протезов 3, 4, 5.
На фиг.3b, 3c видно, что оси вращения опорных втулок 13, 14 перпендикулярны друг другу, что обосновано конкретным расположением вращающегося диска 7 и расположенных на нем или приданных ему осей 16. Оси вращения опорных втулок 13, 14 могут быть ориентированы также параллельно или под углом друг к другу.
Также на фиг.3а-3с видно, что тросовый или волокнистый компонент 11 полностью заделан в эластомер 12, в результате чего, с одной стороны, тросовый или волокнистый компонент 11 защищен от внешних воздействий, а с другой стороны, повышается формоустойчивость устройства 10.
В качестве альтернативы изображенному варианту устройство 10 может быть изготовлено также в виде другого, податливого при сжатии, например пружиняще-упругого и жесткого на растяжение, элемента, например пружинящего изгибающегося или отклоняющегося стержня или соответственно сконструированной проволочной петли.
За счет упругой при сжатии опоры не происходит непосредственной передачи ударных усилий через пальцевые протезы 3, 4, 5 на привод 6 или вращающийся диск 7. Напротив, случайные толчковые движения демпфируются и гасятся. Помимо естественного внешнего вида кистевого протеза 1 это повышает также срок службы опор и компонентов привода, например при падении.
В качестве альтернативы изображенному варианту устройство 10 также в виде пружиняще-демпфирующего блока может быть оснащено соответствующим управлением, например посредством пневмо- или гидроцилиндра с соответствующим клапанным управлением, который может эффективно передавать растягивающие усилия, а в случае сжимающих усилий предусматривает упругую податливость. Пневматическое выполнение вызывает обратное смещение согнутых внутрь пальцевых протезов.
При достаточно изгибно-упругом выполнении тросового компонента эластомерный компонент может быть не нужен; при достаточной прочности на растяжение эластомерного компонента он может быть выполнен также в виде единственного устройства для передачи усилий.
На фиг.4 изображен подробный вид функционального строения протеза 3 большого пальца с фасонным телом 36, имитирующим контур естественного большого пальца. Внутри фасонного тела 36, выполненного в виде полого тела, имеется свободное пространство, в котором расположен и закреплен второй привод 30. Фасонное тело 36 связано, тем самым, с приводом 30, например склеено или зажато. Через угловую передачу в виде винтовой зубчатой передачи 32 и изображенного на фиг.2 червяка 33 привод 30 связан с сегментом 34 зубчатого колеса. При активировании привода 30 червяк 33 вращается в том или ином направлении. За счет установки с возможностью поворота вокруг оси 31 на сегменте 34 зубчатого колеса возможно движение вокруг оси 31 по двойной стрелке. При этом может выполняться радиальное или ульнарное движение. Сам сегмент 34 зубчатого колеса установлен с возможностью поворота вокруг первой оси 15 и за счет вращения вращающегося диска 7 и вызванного этим смещения элемента 10 для передачи усилий может поворачиваться пальмарно или дорсально. Это движение поворота также обозначено двойной стрелкой.
Второй привод 30 представляет собой также электропривод, например электро- или пьезодвигатель, и расположен предпочтительно на продольной оси между седловидным и межфаланговым суставами. За счет небольшой конструкции и необходимого, при случае, высокого приводного момента привод 30 выполнен высокооборотным, причем передача 32 может быть выполнена в виде винтовой зубчатой передачи и создает приблизительно ортогональное отклонение ведомой оси относительно продольной оси второго привода 30. Вследствие этого отклонения ведомой оси червяк 33, находящийся в зацеплении с сегментом 34 зубчатого колеса, вызывает соответствующее движение большого пальца. В качестве альтернативы, в основном, ортогональному отклонению за счет соответствующего выполнения передачи может быть реализовано также любое угловое положение, например ±45° к ортогональной ориентации.
Расположенный в основании 2 кисти первый привод 6 представляет собой предпочтительно низкооборотный электродвигатель с плоским ротором и высоким крутящим моментом, который связан с сильно понижающей передачей для выполнения соответствующего медленного хватательного движения. Управляющие сигналы могут вырабатываться либо посредством дистанционного управления, либо могут представлять собой миоэлектрические сигналы и активировать блок управления. Посредством этого первого привода 6 и вращающегося диска 7 сегмент 34 зубчатого колеса вместе с червяком 33, а также передачей 32 и приводом 30, будучи закрыт фасонным телом 36, может смещаться.
| название | год | авторы | номер документа |
|---|---|---|---|
| КИСТЕВОЙ ПРОТЕЗ | 2006 |
|
RU2387412C2 |
| КИСТЕВОЙ ПРОТЕЗ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ УСИЛИЙ | 2006 |
|
RU2416379C2 |
| ПАЛЬЦЕВЫЙ И КИСТЕВОЙ ПРОТЕЗЫ | 2006 |
|
RU2414871C2 |
| ПЕРЕКЛЮЧАЮЩАЯ МУФТА ДЛЯ ПРОТЕЗОВ | 2006 |
|
RU2429803C2 |
| КИСТЕВОЙ ПРОТЕЗ | 2006 |
|
RU2423952C2 |
| ИСКУССТВЕННЫЙ ПАЛЕЦ | 2014 |
|
RU2667624C2 |
| БИОМЕХАНИЧЕСКИЙ КИСТЕВОЙ ПРОТЕЗ | 2019 |
|
RU2731607C1 |
| УСТРОЙСТВО ПОЗИЦИОННОГО ОЧУВСТВЛЕНИЯ ПОДВИЖНОСТИ ПАЛЬЦЕВ ИСКУССТВЕННОЙ КИСТИ | 2019 |
|
RU2712306C1 |
| ТЕАТРАЛЬНАЯ КУКЛА И КИСТЬ КУКЛЫ | 2006 |
|
RU2349360C2 |
| Электромеханическая кисть | 2017 |
|
RU2663941C1 |

Изобретение относится к медицинской технике, а именно к кистевому протезу. Кистевой протез с основанием, на котором с возможностью движения посредством привода вокруг, по меньшей мере, одной оси поворота относительно основания шарнирно установлен пальцевый протез. В основании (2) расположен первый привод (6), который через устройство (10) для передачи усилий связан с пальцевым протезом (3, 4, 5) и обеспечивает поворот вокруг первой оси (15) поворота. В пальцевом протезе (3, 4, 5) расположен второй привод (30), который обеспечивает поворот, по меньшей мере, части пальцевого протеза (3, 4, 5) вокруг второй оси (31) поворота относительно первой оси (15) поворота. Второй привод (30) через передачу (32), в частности с непересекающимися осями, связан с ведомым элементом (33), который выполнен в виде червяка, который находится в зацеплении с сегментом (34) зубчатого колеса и образует винтовую зубчатую передачу (35). Протез имеет приближенную к внешнему виду естественной кисти форму и улучшенную функциональность. 15 з.п. ф-лы, 4 ил.
1. Кистевой протез с основанием, на котором с возможностью движения посредством привода вокруг, по меньшей мере, одной оси поворота относительно основания шарнирно установлен пальцевый протез, в основании (2) расположен первый привод (6), который через устройство (10) для передачи усилий связан с пальцевым протезом (3, 4, 5) и обеспечивает поворот вокруг первой оси (15) поворота, при этом в пальцевом протезе (3, 4, 5) расположен второй привод (30), который обеспечивает поворот, по меньшей мере, части пальцевого протеза (3, 4, 5) вокруг второй оси (31) поворота относительно первой оси (15) поворота, второй привод (30) через передачу (32), в частности с непересекающимися осями, связан с ведомым элементом (33), который выполнен в виде червяка, который находится в зацеплении с сегментом (34) зубчатого колеса и образует винтовую зубчатую передачу (35).
2. Протез по п.1, отличающийся тем, что приводы (30,6) развязаны друг от друга.
3. Протез по п.1 или 2, отличающийся тем, что устройство (10) для передачи усилий выполнено жестким на растяжение и податливым при нажиме или упруго-изгибным.
4. Протез по п.1, отличающийся тем, что устройство (10) для передачи усилий содержит тросовый или волокнистый компонент (11) или прядь.
5. Протез по п.4, отличающийся тем, что тросовый или волокнистый компонент (11) или прядь выполнен в виде закрытой, открытой или скрученной петли.
6. Протез по п.1, отличающийся тем, что устройство (10) для передачи усилий содержит эластомерный компонент (12).
7. Протез по п.4 или 6, отличающийся тем, что эластомерный компонент (12), по меньшей мере, частично охватывает тросовый или волокнистый компонент (11) или прядь.
8. Протез по п.1, отличающийся тем, что устройство для (10) передачи усилий содержит опорные втулки (13, 14) для размещения осей (15, 16), приданных основанию (2) кисти и пальцевому протезу (3,4, 5).
9. Протез по п.1, отличающийся тем, что устройство (10) для передачи усилий выполнено пружиняще-упругим.
10. Протез по п.9, отличающийся тем, что спружинивание устройства (10) для передачи усилий рассчитано так, что при его нагружении сжимающим усилием происходит возврат пальцевого протеза (3, 4, 5) в исходное положение.
11. Протез по п.1, отличающийся тем, что приводы (30, 6) выполнены в виде электродвигателей.
12. Протез по п.1, отличающийся тем, что второй привод (30) расположен в зоне проксимальной фаланги естественного пальца, в частности большого пальца.
13. Протез по п.1, отличающийся тем, что второй привод (30) установлен на сегменте (34) зубчатого колеса с возможностью поворота.
14. Протез по п.1, отличающийся тем, что червячная передача (35) выполнена самостопорящейся.
15. Протез по п.1, отличающийся тем, что сегмент (34) зубчатого колеса установлен на основании (2) с возможностью поворота.
16. Протез по п.1, отличающийся тем, что второй привод (30) выполнен с возможностью перемещения пальцевого протеза (3, 4, 5) между несколькими установленными положениями.
| US 5080682 A, 14.01.1992 | |||
| US 5888246 A, 30.03.1999 | |||
| ПОТАЙНОЙ РЕВОЛЬВЕР | 1934 |
|
SU45818A1 |
| DE 19906294 A1, 07.09.2000 | |||
| Протез кисти | 1991 |
|
SU1836061A3 |
| Искусственная кисть | 1989 |
|
SU1811823A1 |

