Изобретение относится к кистевому протезу с основанием, на котором с возможностью движения посредством привода вокруг, по меньшей мере, одной оси поворота относительно основания и навстречу друг другу шарнирно установлены несколько пальцевых протезов.
Задачей кистевого протеза является как можно более естественная имитация внешнего вида и функции кисти, которая должна быть заменена протезом. Для этого кистевой протез должен быть способен перемещать по отношению друг к другу захватные устройства, которые могут быть выполнены в виде имитаций пальцев, чтобы обеспечить взятие предмета. Для ослабления хвата может быть инициировано реверсирование направления вращения привода.
Из WO 03/017880 А1 известен кистевой протез, у которого в каждом отдельном пальцевом протезе, установленном на основании, расположен отдельный привод. С помощью такого кистевого протеза возможна реализация различных хватательных движений, например «хвата щепотью» или «латерального хвата». Недостатком являются высокие затраты на управление каждым отдельным пальцем, сложная техника с интегрированными в пальцы приводами и повышенная восприимчивость к неполадкам из-за комплексной конструкции.
Исходя из этого уровня техники в основе изобретения лежит задача создания кистевого протеза, который имел бы простое управление, был бы надежен в пользовании и недорог в изготовлении.
Согласно изобретению, эта задача решается посредством кистевого протеза с признаками п.1 формулы. Предпочтительные варианты и модификации изобретения описаны в зависимых пунктах.
Кистевой протез с основанием, на котором с возможностью движения посредством привода вокруг, по меньшей мере, одной оси поворота относительно основания и навстречу друг другу шарнирно установлены несколько пальцевых протезов, предусматривает, что устройства для передачи усилий посредством общего привода связаны с пальцевыми протезами таким образом, что в зависимости от направления вращения привода, по меньшей мере, два пальцевых протеза смещаются из исходного положения под разными углами относительно основания. При активировании привода в одном направлении вращения сначала из исходного положения в направлении внутренней поверхности кисти движутся, например, указательный и средний пальцы, тогда как большой палец активируется позднее или медленнее. В таком случае этими тремя пальцами может быть реализован так называемый «латеральный хват». При реверсировании направления движения из исходного положения, в котором кистевой протез раскрыт, активируется или движется быстрее в направлении внутренней поверхности кисти сначала большой палец, так что кончики пальцевых протезов сходятся, реализуя так называемый «хват щепотью». Следовательно, возникает разная временная последовательность движений в зависимости от направления вращения привода, причем пальцевые протезы механически связаны с приводом, так что с небольшими затратами на управление, а именно с простым реверсированием направления вращения, можно установить два различных состояния хвата, в которых могут выполняться наиболее частые хватательные функции.
Помимо различных углов смещения, обеспечивающих либо хват щепотью, либо латеральный хват, при соответствующей настройке механизма могут быть реализованы также разные положения хвата щепотью. Механическая связь изготавливается очень недорого. Кроме того, требуется только один общий привод, который размещен предпочтительно в основании кистевого протеза и за счет больших по сравнению с пальцевыми протезами пространственных условий может быть выполнен существенно более мощным.
Один вариант осуществления изобретения предусматривает, что устройства для передачи усилий установлены с возможностью вращения на поворотном связующем элементе, например вращающемся диске, чтобы с минимальными побочными усилиями, происходящими от сгибаний материала при жесткой установке, можно было передавать желаемые усилия. Сам связующий элемент может быть выполнен с возможностью вращения или поворота, причем особенно простое выполнение состоит в том, что вращающийся диск расположен внутри основания так, что ось вращения связующего элемента проходит, в основном, ортогонально пальмарной поверхности основания. Между приводом и связующим элементом может быть расположена передача, чтобы, при необходимости, создать требуемое редуцирование. Предпочтительно ведомая ось привода также ортогональна пальмарной поверхности основания, так что необходимые, при случае, передаточные ступени могут работать всегда с параллельными осями вращения. Если вследствие геометрии привода или основания потребуется изменение направления вращения или ориентации оси вращения, это может быть реализовано, например, посредством угловой передачи.
Особенно простая реализация разных углов смещения достигается за счет того, что устройства для передачи усилий связаны со связующим элементом таким образом, что их опоры со стороны привода имеют разные положения мертвых точек. Если устройство для передачи усилий установлено на вращающемся диске, то смещения в ходе его вращательного движения реализуются составляющей в виде синусоидальной кривой. В зависимости от пройденного угла вращения происходят различные смещения в одной составляющей направления. За счет установки устройства для передачи усилий на связующем элементе с возможностью вращения происходит лишь смещение в одной составляющей направления. Если же точки опоры устройств для передачи усилий выбраны на связующем элементе или вращающемся диске так, что при активировании в первом направлении вращения сначала большой палец проходит положение мертвой точки, то сначала смещаются остальные пальцевые протезы, например указательный и средний пальцы, тогда как во встречном направлении вращения путь смещения указательного и среднего пальцев меньше, чем большого пальца. В качестве альтернативы различные углы смещения могут быть реализованы за счет набегания устройств для передачи усилий на кулачковые диски с разными для каждого направления вращения радиусами. При движении кулачковых дисков из исходного положения в первое направление вращения устройства для передачи усилий, например в виде тяговых лент, набегают на кулачковые диски большего радиуса, чем устройство для передачи усилий для большого пальца. В результате сначала пальмарно смещаются средний и указательный пальцы, тогда как большой палец следует за ними. Во встречном направлении вращения это происходит соответственно наоборот. Возвратное движение может осуществляться за счет упругого натяжения пальцевых протезов. Благодаря кулачковым дискам могут быть установлены различные процессы движения отдельных пальцевых протезов, например, чтобы сначала была реализована высокая скорость поворота, согласованная с возрастающим углом смещения пальцевых протезов, и наоборот.
Для передачи больших усилий привод выполнен предпочтительно в виде электродвигателя с плоским ротором, который может быть размещен в основании, выполненном, например, в виде пясти. Электродвигатель с плоским ротором, выполненный предпочтительно в виде низкооборотного электродвигателя, при относительно компактной конструкции и низкой частоте вращения может вырабатывать большие моменты. Частота вращения может быть редуцирована до нужной посредством циклоидной или волновой передачи.
Один вариант осуществления изобретения предусматривает, что устройства для передачи усилий выполнены жесткими на растяжение и податливыми при нажиме или изгибно-упругими, так что в ограниченной степени возможна упругость при передаче пальмарного усилия на пальцевые протезы, тогда как, наоборот, раскрытие кистевого протеза без разблокирования привода или реверсирование направления движения невозможно. Это обеспечивает надежный хват. Устройства для передачи усилий могут быть в определенной степени стабильными при сжатии, чтобы создавать сжимающие усилия, при необходимости для поддержания раскрывающего движения.
Для стабильной передачи растягивающих усилий предусмотрено, что устройство для передачи усилий содержит тросовый, прядевый или волокнистый компонент, причем ниже для простоты речь идет только о тросовых компонентах. Другие компоненты соответственно включены в них.
Тросовый компонент может быть выполнен в виде открытой, закрытой или скрученной петли и содержать эластомерный компонент для обеспечения всестороннего смещения, например при неправильных положениях оси. Кроме того, эластомерный компонент защищает тросовый компонент от внешних воздействий, если он, по меньшей мере, частично охватывает тросовый компонент.
В устройстве для передачи усилий могут быть расположены опорные втулки для размещения осей, приданных основанию или приводу и пальцевым протезам. При пружиняще-упругом выполнении устройств для передачи усилий их спружинивание рассчитано предпочтительно так, что при нагружении устройства для передачи усилий сжимающим усилием происходит возврат пальцевого протеза в исходное положение.
Ниже пример осуществления изобретения более подробно поясняется с помощью чертежей, на которых изображают:
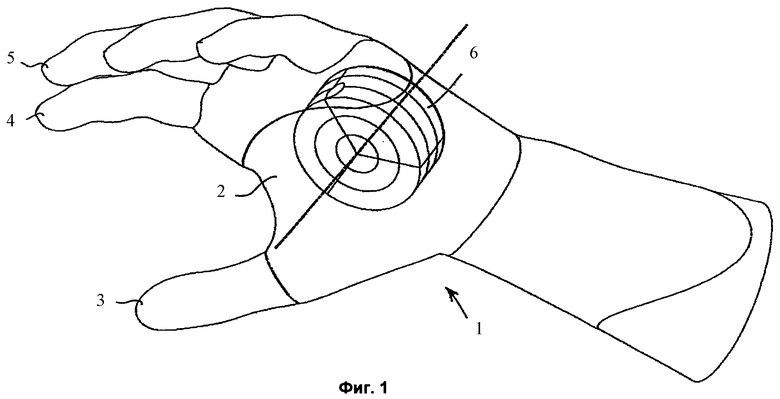
- фиг.1 - схематичный вид кистевого протеза;
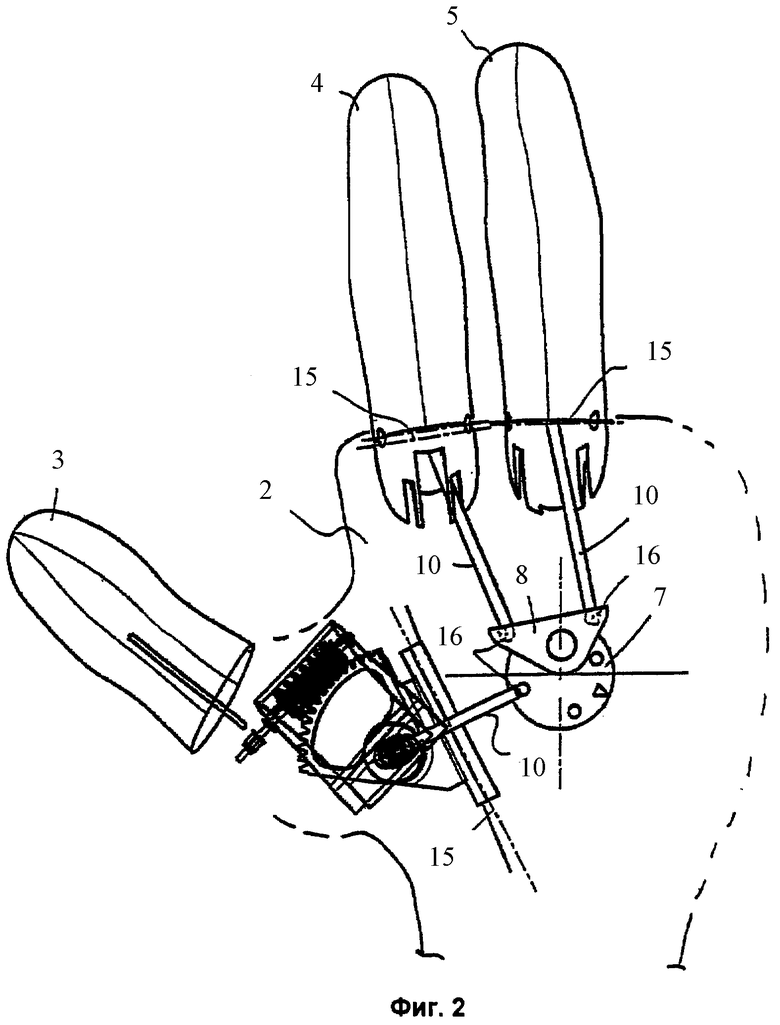
- фиг.2 - схематичное функциональное строение кистевого протеза в пальмарном виде сверху;
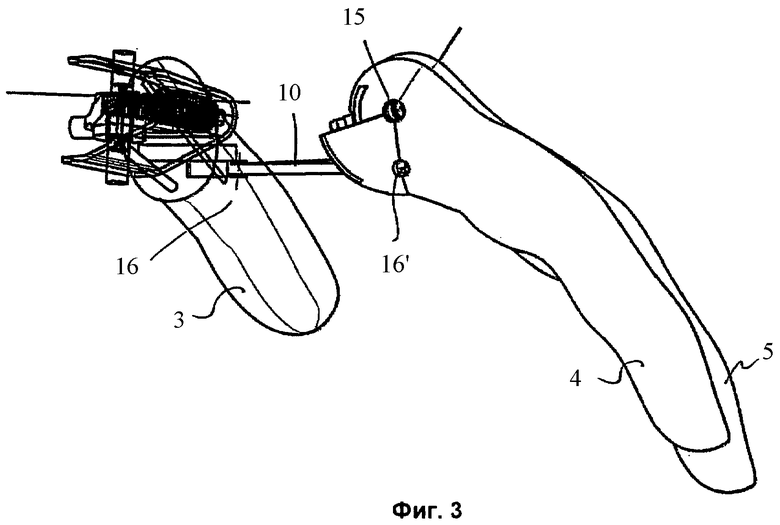
- фиг.3 - вид сбоку из фиг.2;
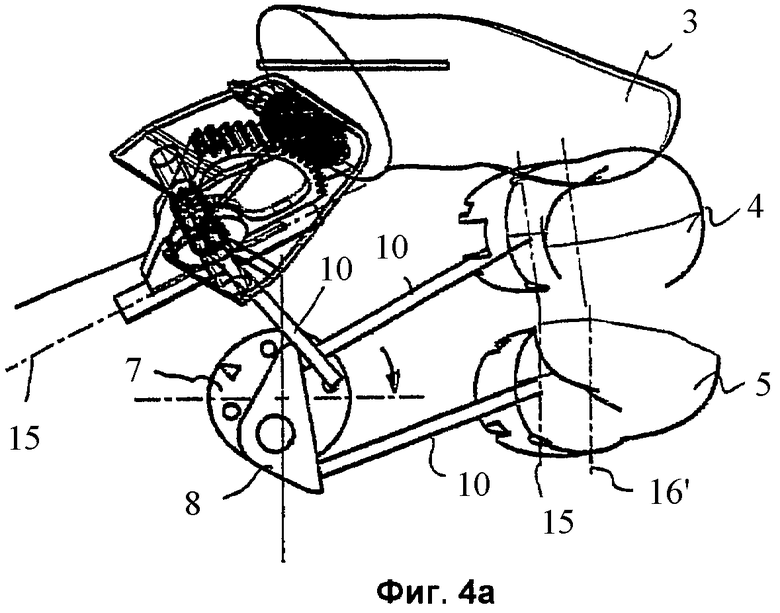
- фиг.4 - закрытую кисть при латеральном хвате;
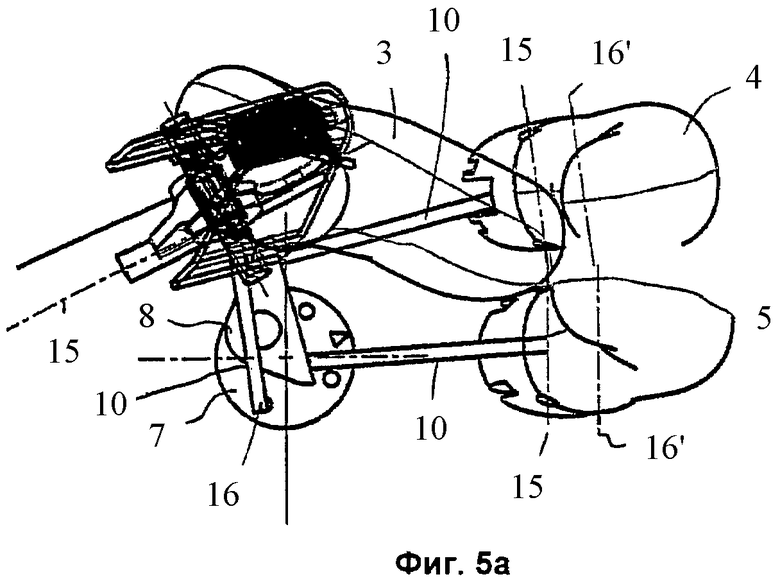
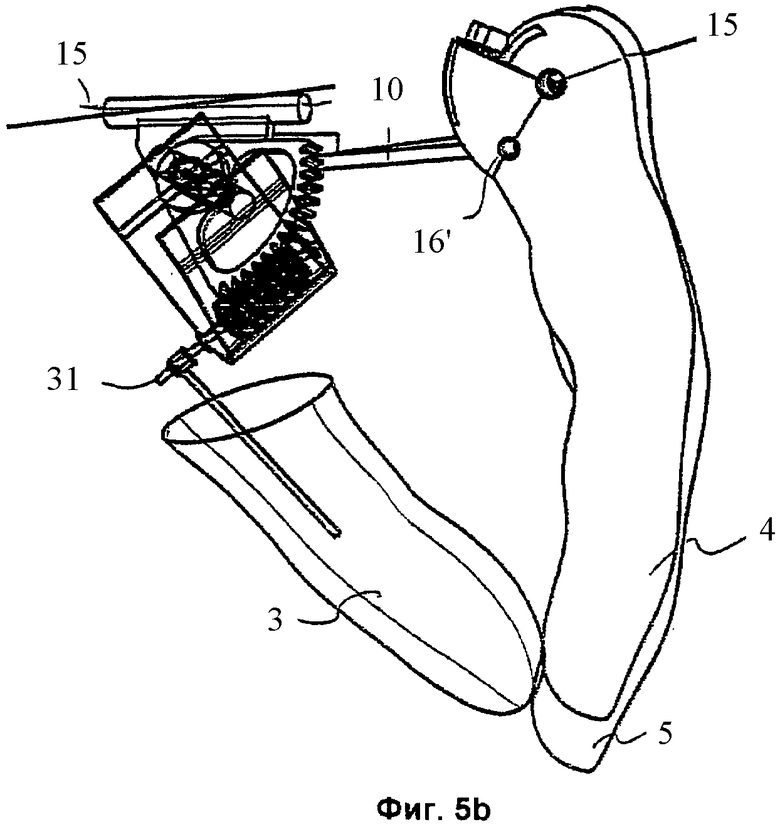
- фиг.5 - закрытую кисть при хвате щепотью;
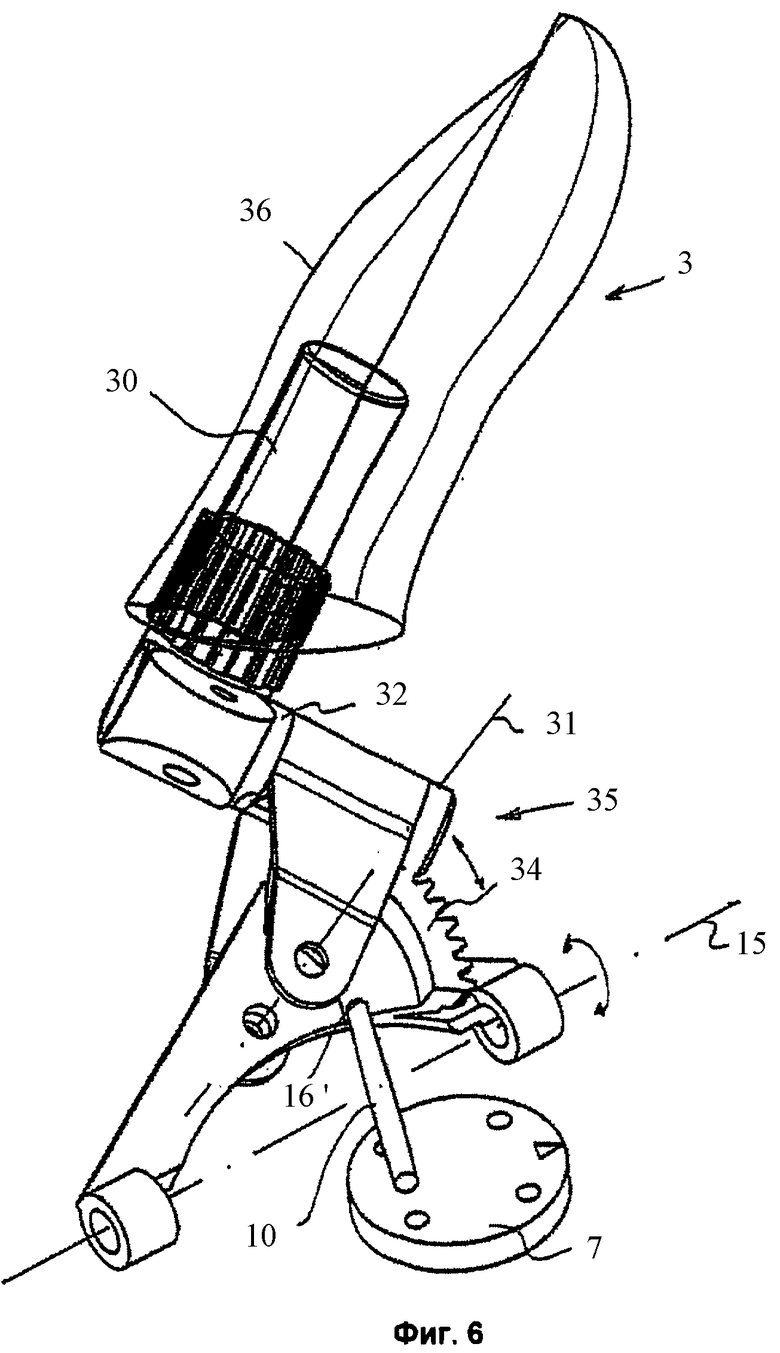
- фиг.6 - подробный вид протеза большого пальца.
На фиг.1 изображен кистевой протез 1, состоящий из основания 2 и, по меньшей мере, трех шарнирно установленных на основании 2 пальцевых протезов 3, 4, 5. Они соответствуют большому, указательному и среднему пальцу естественной кисти. Подвижной и активируемой посредством общего привода 6 опоры этих трех пальцевых протезов 3, 4, 5 достаточно для выполнения кистью большого числа хватательных функций. Оба остальных пальца, безымянный и мизинец, могут двигаться пассивно заодно с ними и состоять из эластомерного материала для достижения как можно более естественного внешнего вида. Внутри основания 2 установлен привод 6 в виде электродвигателя с соответствующей передачей. Также внутри основания 2 может быть расположен источник энергии для привода 6. Управление приводом 6 осуществляется блоком управления, который также может быть расположен в основании 2. Соответствующие сигналы могут вырабатываться посредством дистанционного управления или представлять собой миоэлектрические сигналы.
На фиг.2 схематично показан принцип действия кистевого протеза 1. На основании 2 с возможностью поворота вокруг шарнирных осей 15 установлены три пальцевых протеза 3, 4, 5. Посредством устройств 10 для передачи усилий, конструкция которых подробно описана ниже, пальцевые протезы 3, 4, 5 соединены с вращающимся диском 7, приводимом электродвигателем 6. Устройства 10 установлены на вращающемся диске 7 на осях 16 либо непосредственно, либо посредством балансира 8. Указательный 4 и средний 5 пальцы связаны между собой посредством балансира 8, установленного с возможностью вращения на вращающемся диске 7. Последний установлен непосредственно на ведомом валу привода 6 или на выходном валу редуктора. При активировании привода 6 вращающийся диск 7 движется на соответствующий угол. В результате оси 16 смещаются относительно осей 15 поворота пальцевых протезов 3, 4, 5, что за счет жесткого на растяжение выполнения устройств 10 и отстоящего от осей 15 вращения сочленения устройств 10 с пальцевыми протезами 3, 4, 5 приводит к повороту последних. При реверсировании привода 6 и движении вращающегося диска 7 в положение, в котором оси 16 минимально удалены от осей 15 поворота пальцевых протезов 3, 4, 5, достигается раскрытое исходное положение. За счет пружиняще-упругих свойств устройств 10 пальцевые протезы 3, 4, 5 движутся тогда в свое раскрытое исходное положение. При этом предусмотрено, что устройства 10 могут передавать растягивающие усилия, существенно более высокие, чем сжимающие усилия. Это соответствует физиологическим условиям естественной кисти, которая при закрывании может прикладывать существенно большие усилия, чем при раскрывании.
Для наглядности безымянный палец и мизинец не показаны; они могут быть пассивно сочленены со средним пальцем 5 и за счет этого двигаться заодно с ним. Также безымянный палец и мизинец могут быть сочленены с расширенным балансиром 8, с которым связаны дополнительные устройства 10 для передачи усилий, активирующие дополнительные пальцевые протезы 3, 4, 5.
На фиг.3 при виде сбоку из фиг.2 кистевой протез изображен в исходном положении, в котором большой 3, указательный 4 и средний 5 пальцы находятся в слегка раскрытом, приближенном к естественному состоянию исходном положении. Видно, что устройства 10 для передачи усилий сочленены в местах 16' опоры с пальцевыми протезами 4, 5, отстоящими от их осей 15 вращения. Смещение оси 16 вращения на связующем элементе 7 вызывает сгибание пальцевых протезов 4, 5 за счет передаваемых растягивающих усилий. При вращении вращающегося диска 7 из исходного положения на фиг.2, 3 по часовой стрелке на фиг.4а сначала в направлении внутренней поверхности кисти движутся протезы 4, 5 указательного и среднего пальцев, тогда как протез 3 большого пальца лишь после этого смещается в направлении внутренней поверхности кисти, поскольку приданное ему устройство 10 для передачи усилий должно пройти сначала мертвую точку, т.е. кратчайшее расстояние между осью 16 вращения со стороны привода и осью 15 поворота. За счет особого расположения устройств 10 для передачи усилий протезов 4, 5 указательного и среднего пальцев они смещаются пальмарно быстрее или в широком угловом диапазоне, так что протез 3 большого пальца прилегает к радиальной стороне протеза 4 указательного пальца. Это обеспечивает показанный латеральный хват.
На фиг.5 показано положение пальцевых протезов 3, 4, 5 в направлении вращения против часовой стрелки.
Здесь вокруг оси 15 поворота пальмарно и ульнарно движется сначала протез 3 большого пальца, тогда как пальцевые протезы 4, 5 должны прежде пройти свою мертвую точку или они сочленены с вращающимся диском 7 так, что при соответствующем угле вращения происходит лишь меньшее угловое смещение. Протез 3 большого пальца направляется сначала внутрь, а кончики пальцевых протезов 3, 4, 5 прилегают друг к другу в своих конечных положениях, реализуя так называемый «хват щепотью».
Для обеспечения дополнительных возможностей хвата в протезе 3 большого пальца может быть расположен дополнительный привод, изображенный на фиг.6. Видно, что протез 3 большого пальца помимо первой оси 15 поворота имеет вторую ось 31 поворота, с возможностью движения вокруг которой установлен, по меньшей мере, дистальный конец протеза 3. Посредством второго привода 30 и винтовой зубчатой передачи 32 или многозаходной червячной передачи движется ведомый червяк 33, который находится в зацеплении с сегментом 34 зубчатого колеса и вызывает, таким образом, смещение протеза 3 с приводом 30 и передачей 32 вокруг оси 31 поворота. При одновременном активировании обоих приводов 6, 30 в соответствии со скоростями смещения выполняется комбинированное пальмарно-ульнарное движение протеза 3, что соответствует естественной подвижности большого пальца.
На фиг.6 подробно изображено функционирование протеза 3 большого пальца с фасонным телом 36, имитирующим контур естественного большого пальца. Внутри фасонного тела 36, выполненного в виде полого тела, имеется свободное пространство, в котором расположен и закреплен второй привод 30. Фасонное тело 36 связано, тем самым, с приводом 30, например склеено или зажато. Через угловую передачу в виде винтовой зубчатой передачи 32 и изображенного на фиг.2 червяка 33 привод 30 связан с сегментом 34 зубчатого колеса.
При активировании привода 30 червяк 33 вращается в том или ином направлении. За счет установки с возможностью поворота вокруг оси 31 на сегменте 34 зубчатого колеса возможно движение вокруг оси 31 по двойной стрелке. При этом может выполняться радиальное или ульнарное движение. Сам сегмент 34 зубчатого колеса установлен с возможностью поворота вокруг первой оси 15 и за счет вращения вращающегося диска 7 и вызванного этим смещения элемента 10 для передачи усилий может поворачиваться пальмарно или дорсально. Это движение поворота также обозначено двойной стрелкой.
Второй привод 30 представляет собой также электродвигатель и расположен предпочтительно на продольной оси между седловидным и межфаланговым суставами. За счет небольшой конструкции и необходимого, при случае, высокого приводного момента привод 30 выполнен высокооборотным, причем передача 32 может быть выполнена в виде винтовой зубчатой передачи и создает отклонение ведомой оси относительно продольной оси второго привода 30 в угловом диапазоне 45-135°. Вследствие этого отклонения ведомой оси червяк 33, находящийся в зацеплении с сегментом 34 зубчатого колеса, вызывает соответствующее движение большого пальца.
Расположенный в основании 2 кисти первый привод 6 представляет собой предпочтительно низкооборотный электродвигатель с плоским ротором и высоким крутящим моментом, который связан с сильно понижающей передачей для выполнения соответствующего медленного и сильного хватательного движения. Управляющие сигналы могут вырабатываться либо посредством дистанционного управления, либо могут представлять собой миоэлектрические сигналы и активировать блок управления. Посредством этого первого привода 6 и вращающегося диска 7 сегмент 34 зубчатого колеса вместе с червяком 33, а также передачей 32 и приводом 30, будучи закрыт фасонным телом 36, может смещаться.
| название | год | авторы | номер документа |
|---|---|---|---|
| КИСТЕВОЙ ПРОТЕЗ | 2006 |
|
RU2427348C2 |
| КИСТЕВОЙ ПРОТЕЗ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ УСИЛИЙ | 2006 |
|
RU2416379C2 |
| ПЕРЕКЛЮЧАЮЩАЯ МУФТА ДЛЯ ПРОТЕЗОВ | 2006 |
|
RU2429803C2 |
| БИОМЕХАНИЧЕСКИЙ КИСТЕВОЙ ПРОТЕЗ | 2019 |
|
RU2731607C1 |
| ПРОТЕЗ РУКИ ДЛЯ ПАЦИЕНТОВ СО СТЕПЕНЬЮ АМПУТАЦИИ ОТ ПАЛЬЦЕВ ДО ПРЕДПЛЕЧЬЯ, ПРОТЕЗ ЛУЧЕЗАПЯСТНОГО СУСТАВА, ВКЛЮЧАЮЩИЙ ПРОТЕЗ КИСТИ РУКИ, УСТРОЙСТВО БЛОКИРОВКИ ТРОСОВ ТЯГ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (3 ВАРИАНТА), УСТРОЙСТВО УПРАВЛЕНИЯ КОМБИНАЦИЕЙ ПОЛОЖЕНИЯ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (2 ВАРИАНТА) | 2017 |
|
RU2664171C1 |
| ПАЛЬЦЕВЫЙ И КИСТЕВОЙ ПРОТЕЗЫ | 2006 |
|
RU2414871C2 |
| ИСКУССТВЕННАЯ БИОЭЛЕКТРИЧЕСКАЯ КИСТЬ РУКИ | 2021 |
|
RU2779492C1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| КИСТЕВОЙ ПРОТЕЗ | 2006 |
|
RU2423952C2 |
| ТЕАТРАЛЬНАЯ КУКЛА И КИСТЬ КУКЛЫ | 2006 |
|
RU2349360C2 |

Изобретение относится к медицинской технике и предназначено для имитации внешнего вида и функции кисти. Кистевой протез имеет основание, на котором с возможностью движения посредством привода вокруг, по меньшей мере, одной оси поворота относительно основания и навстречу друг другу шарнирно установлены несколько пальцевых протезов. Посредством общего привода устройства для передачи усилий связаны со связующим элементом таким образом, что их опоры со стороны привода имеют разные положения мертвой точки. Устройства для передачи усилий связаны с пальцевыми протезами таким образом, что в зависимости от направления вращения привода, по меньшей мере, два пальцевых протеза выполнены со смещением из исходного положения под разными углами относительно основания. Технический результат заключается в снижении затрат на управление каждым отдельным пальцем. 14 з.п. ф-лы, 6 ил.
1. Кистевой протез с основанием, на котором с возможностью движения посредством привода вокруг, по меньшей мере, одной оси поворота относительно основания и навстречу друг другу шарнирно установлены несколько пальцевых протезов, отличающийся тем, что устройства (10) для передачи усилий посредством общего привода (6) связаны со связующим элементом (7) таким образом, что их опоры со стороны привода имеют разные положения мертвой точки, а также с пальцевыми протезами (3, 4, 5) таким образом, что в зависимости от направления вращения привода (6), по меньшей мере, два пальцевых протеза (3, 4, 5) выполнены со смещением из исходного положения под разными углами относительно основания (2).
2. Протез по п.1, отличающийся тем, что устройства (10) для передачи усилий установлены с возможностью вращения на поворотном связующем элементе (7).
3. Протез по п.1 или 2, отличающийся тем, что связующий элемент (7) выполнен в виде вращающегося диска (7).
4. Протез по п.2, отличающийся тем, что ось вращения связующего элемента (7) ориентирована, в основном, ортогонально пальмарной поверхности основания (2).
5. Протез по п.1, отличающийся тем, что ведомая ось привода (6) ориентирована, в основном, ортогонально пальмарной поверхности основания (2).
6. Протез по п.1, отличающийся тем, что привод (6) выполнен в виде электродвигателя с плоским ротором.
7. Протез по п.1, отличающийся тем, что привод (6) связан с циклоидной или волновой передачей, на которой расположен связующий элемент (7).
8. Протез по п.1, отличающийся тем, что устройство (10) для передачи усилий выполнено жестким на растяжение и податливым при нажиме или изгибно-упругим.
9. Протез по п.1, отличающийся тем, что устройство (10) для передачи усилий выполнено в виде троса, пряди или волокнистого компонента.
10. Протез по п.9, отличающийся тем, что трос, прядь или волокнистый компонент выполнен в виде закрытой петли.
11. Протез по п.1, отличающийся тем, что устройство (10) для передачи усилий содержит эластомерный компонент.
12. Протез по п.11, отличающийся тем, что эластомерный компонент, по меньшей мере, частично охватывает трос, прядь или волокнистый компонент.
13. Протез по п.1, отличающийся тем, что устройства (10) для передачи усилий содержат опорные втулки для размещения осей (15, 16), приданных основанию (2) и пальцевым протезам (3, 4, 5).
14. Протез по п.1, отличающийся тем, что устройство (10) для передачи усилий выполнено пружиняще-упругим.
15. Протез по п.14, отличающийся тем, что спружинивание устройства (10) для передачи усилий рассчитано так, что при его нагружении сжимающим усилием происходит возврат пальцевого протеза (3, 4, 5) в исходное положение.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| DE 20301116 U1, 20.03.2003 | |||
| ПРОТЕЗ КИСТИ | 1998 |
|
RU2139696C1 |
| ПРОТЕЗ РУКИ С АКТИВНЫМ СХВАТОМ КИСТИ | 1991 |
|
RU2008852C1 |

