Настоящее изобретение имеет отношение к устройству закрепления для системы загрузки в грузовой отсек самолета, содержащему по меньшей мере один крепежный захват, предусмотренный в области двери грузового отсека, к механизму управления и к элементу приведения в действие, в частности к ножной педали.
Груз, предназначенный для транспортирования на самолете, обычно пакуют на поддонах или в грузовых контейнерах. Поддоны или грузовые контейнеры легко могут перемещаться внутри грузового отсека самолета по роликам системы загрузки. Для исключения выкатывания поддонов или грузовых контейнеров из грузового отсека неконтролируемым образом в области двери грузового отсека предусмотрены крепежные захваты, которые в положении закрепления выступают над плоскостью грузового отсека. Если необходимо разгрузить поддоны или грузовые контейнеры, крепежные захваты перемещают в положение ниже плоскости грузового отсека, что позволяет выкатывать поддоны или грузовые контейнеры поверх указанных крепежных захватов.
В известных механических устройствах закрепления для дверей грузовых отсеков приведение в действие крепежных захватов производят при помощи рукоятки, которая, за счет устройства натяжения троса, с поворотом опускает крепежные захваты ниже плоскости грузового отсека с преодолением усилия пружины возврата. После этой процедуры опускания крепежные захваты и рукоятку перемещают назад в их исходные положения при помощи пружины возврата, причем это перемещение задерживают во времени при помощи гидравлического амортизатора, так что над крепежными захватами могут временно перемещаться поддоны или грузовые контейнеры.
Приведение в действие крепежных захватов при помощи устройства натяжения троса связано, в частности, с тем недостатком, что при установке устройства натяжения троса необходимо учитывать множество проектных граничных условий, например радиусов изгиба, заданных минимальных расстояний от других систем и т.п., что существенно повышает производственные затраты. Более того, если устройство натяжения троса установлено неправильно, оно может быстро изнашиваться и выходить из строя. Кроме того, в случае низких температур в грузовом отсеке, могут замерзать гидравлические амортизаторы, которые используют для задержанного выпрямления (выдвижения) крепежных захватов, так что система блокируется. Более того, при использовании гидравлических амортизаторов, вообще говоря, время задержки до достижения автоматического обновленного выпрямления недостаточно для поворота грузовых модулей, а в частности поддонов или грузовых контейнеров, в области двери грузового отсека.
Кроме того, известно, что крепежными захватами можно управлять дистанционно при помощи электрических приводов и т.п., что приводит к повышенному риску отказа во время работы. Более того, электрические приводы и их системы регулирования увеличивают вес всего устройства закрепления.
Задачей настоящего изобретения является создание устройства закрепления для дверей грузовых отсеков, причем такое устройство закрепления позволяет исключить указанные здесь выше недостатки известных устройств закрепления.
Эта задача выполнена при помощи устройства закрепления согласно изобретению.
Устройством закрепления в соответствии с настоящим изобретением можно легко управлять за счет того, что в закрепленном положении (в положении закрепления) по меньшей мере один имеющийся крепежный захват выступает над плоскостью грузового отсека, чтобы исключить выкатывание находящихся в системе загрузки грузовых модулей из двери грузового отсека, и за счет того, что по меньшей мере один имеющийся крепежный захват, в положении загрузки, может быть с поворотом опущен ниже плоскости грузового отсека, что позволяет выкатывать грузовые модули, причем, при помощи механизма управления, по меньшей мере один имеющийся крепежный захват, за счет приведения в действие ножной педалью, альтернативно может быть установлен с блокированием в закрепленное положение или в положение загрузки. Более того, чисто механическая система управления, за счет механизма управления устройства закрепления, позволяет безотказно работать при всех заданных условиях окружающей среды.
Предпочтительный вариант устройства закрепления, снабженный механизмом управления, содержит стопорный ползун, который может быть приведен в действие при помощи ножной педали, за счет чего стопорный ползун и ползун включения поворачивают по меньшей мере один имеющийся крепежный захват. Этот вариант позволяет, при некоторых ограничениях, устанавливать ползун включения независимо от положения стопорного ползуна, так что возможна, например, операция запирания (блокировки).
В соответствии с дополнительным предпочтительным вариантом ползун включения содержит отверстие удлиненной формы, в которое может быть введен с возможностью перемещения стопорный штифт, предусмотренный на стопорном ползуне. За счет этого стопорный ползун, например, когда ползун включения заперт (блокирован) на месте, может скользить назад в свое исходное положение.
В соответствии с еще одним предпочтительным вариантом устройство закрепления содержит ползун включения, который может быть остановлен (блокирован) в положении загрузки при помощи фиксатора. За счет этого пользователь может отпустить ножную педаль при достижении состояния загрузки.
Указанные ранее и другие характеристики изобретения будут более ясны из последующего детального описания, данного в качестве примера, не имеющего ограничительного характера и приведенного со ссылкой на сопроводительные чертежи, где показано следующее.
На фиг.1 показан вид в перспективе механизма управления устройства закрепления.
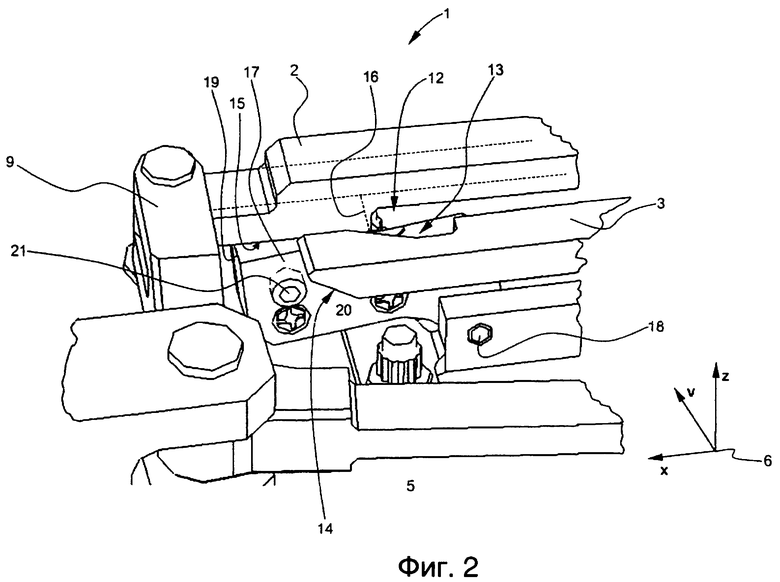
На фиг.2 показан вид в перспективе части механизма управления.
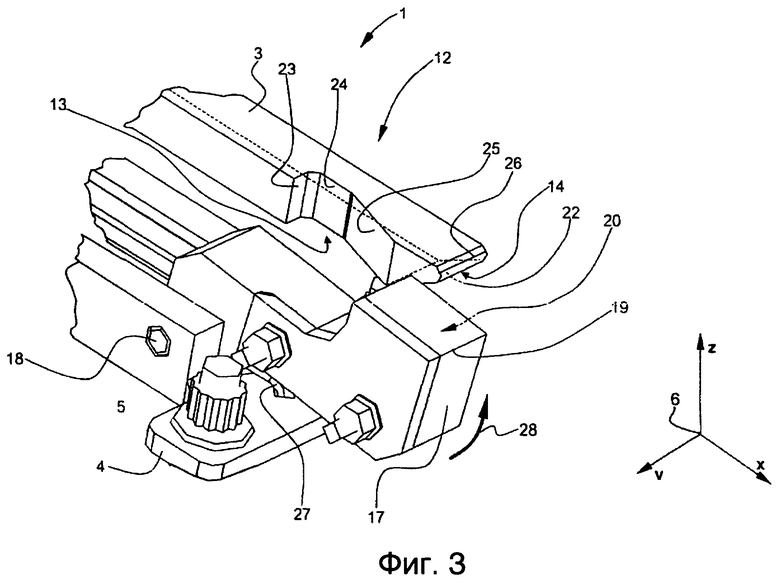
На фиг.3 показан вид в перспективе концевого участка стопорного ползуна.
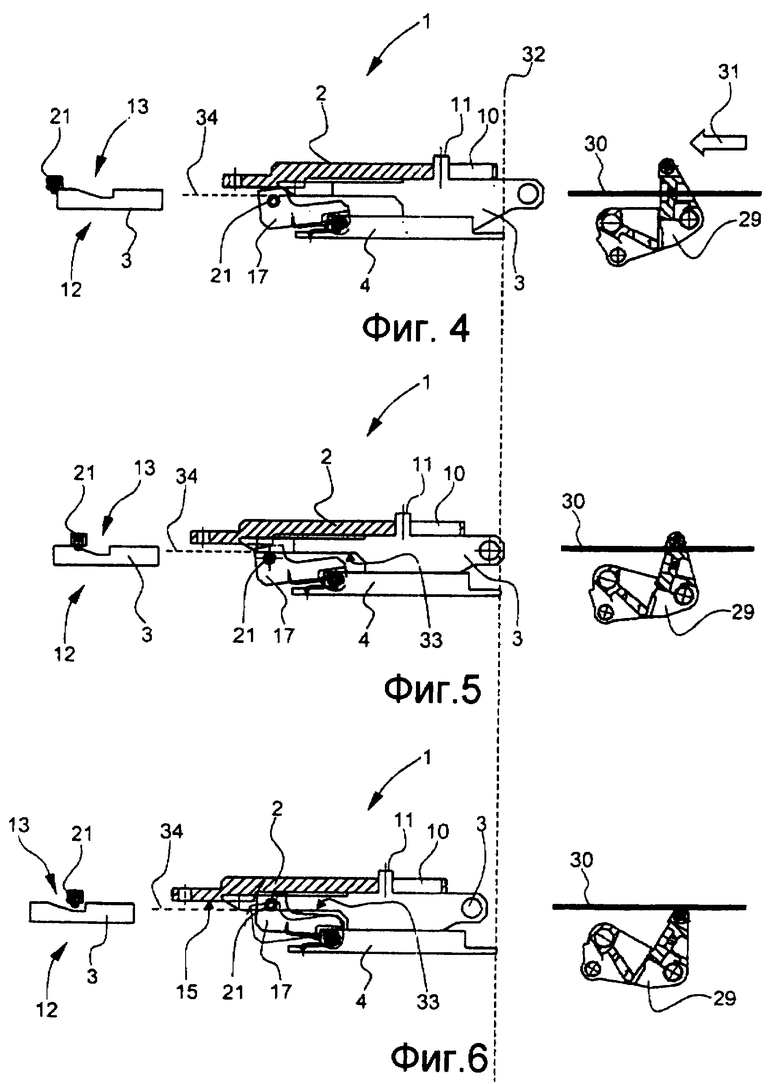
На фиг.4-6 схематично показана процедура опускания крепежного захвата для достижения состояния загрузки.
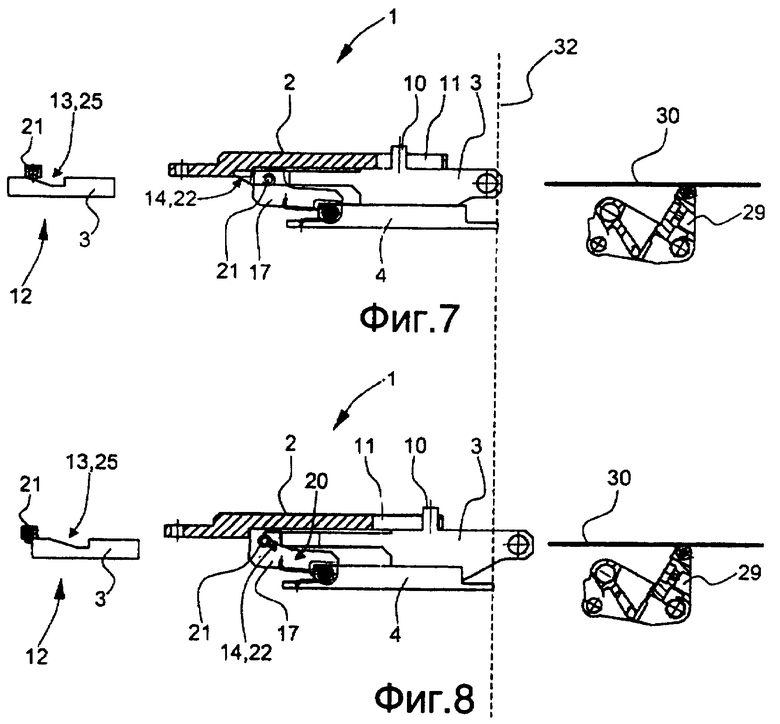
На фиг.7-8 схематично показана процедура возврата стопорного ползуна.
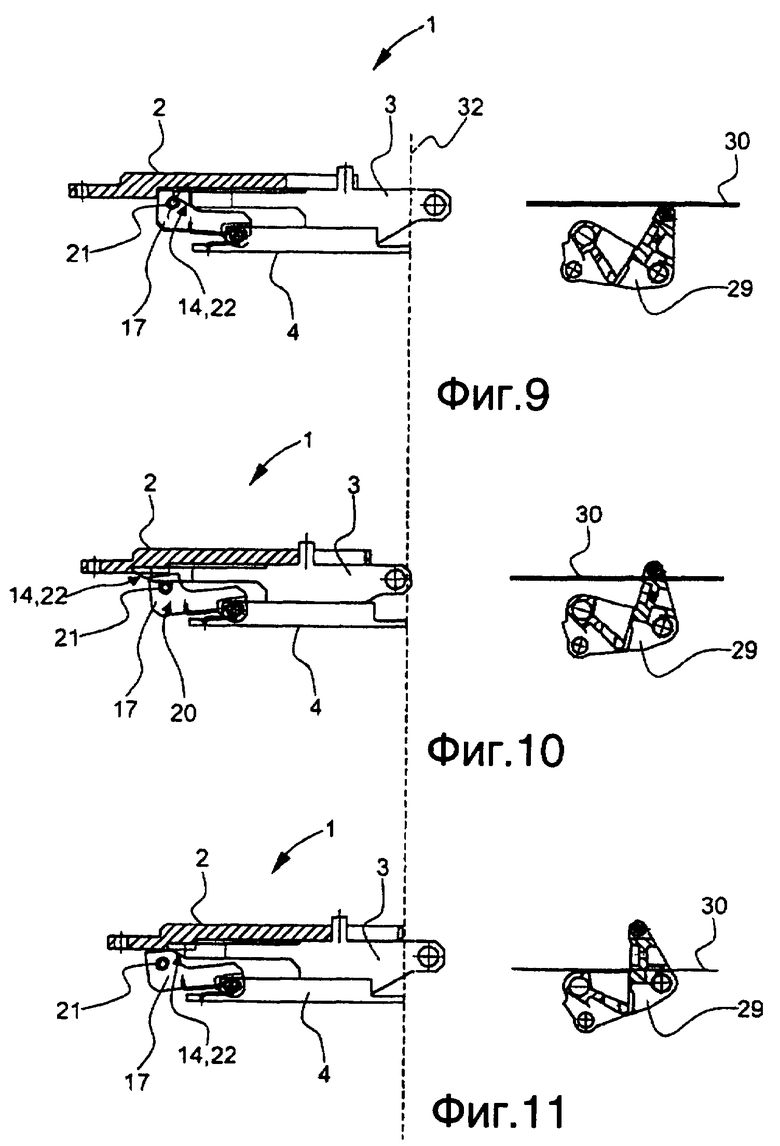
На фиг.9-11 схематично показан процесс подъема (выпрямления, erection) крепежного захвата для повторного достижения состояния закрепления.
На фиг.1 показан вид в перспективе механизма 1 управления. Ползун 2 включения и стопорный ползун 3 установлены на плите 5 основания при помощи опоры 4 с возможностью скольжения параллельно оси х системы 6 координат. За счет толкателя 7, пружины 8 и других рычагов (не показаны) стопорный ползун 3 механически связан с элементом приведения в действие (тоже не показан), например с ножной педалью. В свою очередь, ползун 2 включения сочленен с рычагом 9. Дополнительные элементы передачи (не показаны на фиг.1) сочленены с рычагом 9, при помощи которого эти элементы передачи могут приводить в действие крепежные захваты (не показаны), то есть опускать их под плоскость грузового отсека, и с поворотом поднимать их над плоскостью грузового отсека, чтобы крепить грузовые модули, которые катятся по указанной плоскости грузового отсека.
В соответствии с предпочтительным конструктивным вариантом устройства закрепления в соответствии с настоящим изобретением соединение между ножной педалью и стопорным ползуном 3 производят при помощи рычажно-зубчатой передачи. Соответственно, механическое соединение между ползуном 2 включения и по меньшей мере одним имеющимся крепежным захватом также производят при помощи зубчатой передачи, а в частности при помощи рычажно-зубчатой передачи. Следовательно, по меньшей мере один имеющийся крепежный захват может быть дистанционно приведен в действие при помощи ножной педали, то есть может быть с поворотом опущен ниже уровня плоскости грузового отсека.
Отверстие 10 удлиненной формы предусмотрено в ползуне 2 включения. В отверстие 10 удлиненной формы введен стопорный штифт 11 с возможностью перемещения параллельно оси x. Если стопорный ползун 3 движется влево по оси x, то стопорный штифт 11 перемещает ползун 2 включения в этом же направлении, в результате чего рычаг 9 совершает поворот и крепежные захваты опускаются при помощи рычажного механизма (детально не показан). Более того, стопорный ползун 3 имеет концевой участок 12.
На фиг.2 показан вид в перспективе части механизма управления. Для понимания пространственной ориентации вновь показана система 6 координат. Концевой участок 12 стопорного ползуна 3 содержит выемку 13 и уклон 14. На своей обратной стороне 15 ползун 2 включения содержит кромку 16 захвата. Более того, на плите 5 основания установлен фиксатор 17, который может совершать поворот на оси 18. За счет поворотной пружины (не показана на фиг.2) фиксатор 17 всегда стремится двигаться вверх в направлении оси z, то есть стремится подниматься. Направление перемещения ползуна 2 включения и стопорного ползуна 3 главным образом параллельно оси x. Фиксатор 17 содержит кромку 19 захвата. Если в результате воздействия пользователя на ножную педаль ползун 2 включения перемещается в направлении оси х, то тогда кромка 19 захвата фиксатора 17 фиксируется позади кромки 16 захвата, в результате чего ползун 2 включения блокируется в так называемом положении загрузки, в котором крепежные захваты с поворотом опущены ниже уровня плоскости грузового отсека, так что расположенные сверху грузовые модули могут вкатываться в грузовой отсек и выкатываться из него. После этого крепежные захваты вновь приводятся в действие за счет рычага 9, а также при помощи дополнительных элементов передачи (которые для упрощения понимания на чертеже не показаны).
С боковой стороной 20 фиксатора 17 упруго взаимодействует расцепляющий штифт 21. В этой конструкции расцепляющий штифт 21 может двигаться как упругий (sprung, подпружиненный) элемент ориентировочно параллельно оси у, то есть главным образом перпендикулярно боковой стороне 20. В показанном состоянии расцепляющий штифт 21 несколько выступает над боковой стороной 20, однако он может быть принудительно введен в фиксатор 17 так, что будет находиться главным образом заподлицо с боковой стороной 20.
На фиг.3 показан вид в перспективе концевого участка 12 стопорного ползуна 3 с фиксатором 17, причем для упрощения понимания ползун 2 включения условно удален. Для понимания пространственной ориентации вновь показана плита 5 основания и система 6 координат.
Уклон 14 содержит поверхность 22 скольжения, которая расположена под углом около 45° к плоскости, образованной осями x и у. Выемка 13 содержит грань 23, которая расположена главным образом перпендикулярно боковой стороне 20 стопорного ползуна 3. Более того, выемка 13 содержит базовую поверхность 24, которая расположена главным образом параллельно боковой стороне 20. Поверхность 25 скольжения продолжает базовую поверхность 24 и идет под углом около 30° относительно боковой стороны 20. Однако следует иметь в виду, что углы могут отличаться от указанных здесь выше. Уклон 14 дополнительно имеет закругленную кромку 26.
При помощи кромки 19 захвата фиксатор 17 фиксируется позади кромки захвата (не показанной на фиг.3) ползуна 2 включения (сравните с фиг.2). Фиксатор 17 выполнен так, что он может совершать поворот на оси 18, причем за счет действия пружины 27 фиксатор 17 всегда стремится двигаться вверх в направлении стрелки 28. Это гарантирует, что кромка 19 захвата всегда упирается с заданным предварительным давлением в обратную сторону 15 не показанного ползуна 2 включения. За счет опоры 4 ползун 2 включения и стопорный ползун 3 установлены на плите 5 основания с возможностью скольжения главным образом параллельно оси х.
Для более подробного описания последовательности движения во время процедуры переключения между закрепленным положением и положением загрузки механизма управления обратимся к рассмотрению фиг.4-11.
На фиг.4-6 схематично показан механизм 1 управления устройства закрепления в соответствии с настоящим изобретением, во время перехода от закрепленного положения к положению загрузки.
В левой колонке на чертежах показаны соответствующие положения расцепляющего штифта 21 относительно концевой области 12 стопорного ползуна 3 с выемкой 13, в виде сверху, то есть в направлении z (сравните с положением на фиг.1). В средней колонке показаны соответствующие положения ползуна 2 включения, стопорного ползуна 3, стопорного штифта 11 в отверстии 10 удлиненной формы, а также положения фиксатора 17 с расцепляющим штифтом 21. Наконец, в качестве примера, в правой колонке показаны положения только крепежного захвата 29 относительно плоскости 30 грузового отсека. Альтернативно, любое желательное число крепежных захватов могут быть установлены вдоль двери грузового отсека. Перпендикулярная вспомогательная линия 32 служит для установки связи между указанными выше компонентами и опорой 4, используемой в качестве фиксированной исходной точки.
На фиг.4 показана система 1 управления в закрепленном положении, в котором крепежный захват 29 или крепежные захваты с поворотом подняты выше уровня плоскости 30 грузового отсека. В этом закрепленном положении, за счет выступающих вверх крепежных захватов 29, грузовые модули, такие как, например, грузовые контейнеры или грузовые поддоны, не могут выкатываться неконтролируемым образом из двери грузового отсека. Однако в направлении стрелки 31 крепежный захват 29 выполнен так, что объекты могут двигаться поверх него, так что даже когда крепежный захват 29 находится в своем положении закрепления, грузовые модули могут двигаться снаружи в грузовой отсек самолета.
Если крепежный захват 29 следует опустить ниже уровня плоскости 30 грузового отсека, пользователь нажимает на ножную педаль (не показана), при этом стопорный ползун 3 скользит влево, как это показано на фиг.5. При этом стопорный штифт 11, который со скольжением движется в отверстии 10 удлиненной формы, со скольжением перемещает ползун 2 включения в этом же направлении, в результате чего крепежный захват 29 постепенно опускается ниже уровня плоскости 30 грузового отсека. В этом случае, механическая связь между крепежным захватом 29 и ползуном включения 2 осуществляется при помощи рычажного механизма (не показан). При этом обратная сторона 33 стопорного ползуна 3 движется поверх расцепляющего штифта 21, как это показано горизонтальной вспомогательной линией 34. Во время этой процедуры фиксатор 17 не изменяет своего положения. Если ножную педаль нажать сильнее (по сравнению с показанным на фиг.6), тогда ползун 2 включения и стопорный ползун 3 будут продолжать двигаться вправо на небольшое расстояние, так что фиксатор 17 совершает скачок вверх и блокируется на обратной стороне 15 ползуна 2 включения. За счет этого ползун 2 включения останавливается в показанном положении, при этом крепежный захват 29 находится в положении загрузки, а другими словами, в состоянии, в котором он дополнительно опущен ниже уровня плоскости 30 грузового отсека. В этом положении расцепляющий штифт 21 расположен в выемке 13 стопорного ползуна 3.
На фиг.7-8 показан процесс возврата стопорного ползуна 3, когда пользователь отпускает ножную педаль. В левой колонке на чертежах показаны соответствующие положения расцепляющего штифта 21 относительно концевой области 12 стопорного ползуна 3 с выемкой 13, и соответствующая поверхность скольжения 25 в виде сверху, то есть в направлении z (сравните, в частности, с положением на фиг.1). В средней колонке показаны соответствующие положения ползуна 2 включения, стопорного ползуна 3, стопорного штифта 11 в отверстии 10 удлиненной формы, а также положения фиксатора 17 с расцепляющим штифтом 21. Наконец, в качестве примера, в правой колонке показаны положения индивидуального крепежного захвата 29 относительно плоскости 30 грузового отсека. Вертикальная вспомогательная линия 32 служит для установки связи между указанными выше компонентами и опорой 4, используемой в качестве фиксированной исходной точки.
Во время процедуры возврата крепежный захват 29 остается повернутым ниже уровня плоскости 30 грузового отсека, так как ползун 2 включения, за счет связанного фиксатора 17, не изменяет своего положения относительно опоры 4 или относительно вспомогательной линии 32 во время процесса возврата стопорного ползуна 3. За счет силы сжатия пружины (не показана) стопорный ползун 3 скользит назад в правое положение, показанное на фиг.8. При этом расцепляющий штифт 21 проходит поверх наклонной поверхности 25 скольжения выемки 13 в концевой области 12 стопорного ползуна 3, причем, за счет его упругости, он принудительно входит в боковую сторону 20 фиксатора 17, так что исключается разблокирование фиксатора 17 за счет опускания указанного фиксатора 17. В окончательном положении, показанном на фиг.8, расцепляющий штифт 21, который был отпущен поверхностью 25 скольжения, скачком выходит из фиксатора 17 и упирается в уклон 14 в области поверхности 22 скольжения.
На фиг.9-11 схематично показана последовательность при переходе от положения загрузки к закрепленному положению при полностью поднятом крепежном захвате. В левой колонке схематично показаны положения механизма 1 управления с ползуном 2 включения, стопорным ползуном 3, фиксатором 17, расцепляющим штифтом 21 и опорой 4, а также вспомогательная линия 32, в то время как в правой колонке показаны положения крепежного захвата 29 относительно плоскости 30 грузового отсека.
На фиг.9 показан механизм 1 управления, который находится в положении загрузки, при этом крепежный захват 29 находится в его самом нижнем положении относительно уровня плоскости 30 грузового отсека (сравните с показанным на фиг.8). Ползун 2 включения все еще остановлен (блокирован) при помощи фиксатора 17. Стопорный ползун 3 находится в его самом правом положении относительно вспомогательной линии 32. Если пользователь опять нажимает ножную педаль, чтобы перевести устройство закрепления из состояния загрузки в закрепленное состояние, тогда стопорный ползун 3 движется влево, как это показано на фиг.10. В этом процессе поверхность 22 скольжения уклона 14 движется поверх расцепляющего штифта 21, который выступает из боковой стороны 20 фиксатора 17, так что фиксатор 17 опускается при прохождении стопорного ползуна 3, в результате чего ползун 2 включения разблокируется. Ползун 2 включения, который был отпущен фиксатором 17, будет двигаться вправо относительно вспомогательной линии 32 и будет поворачивать крепежный захват 29 в положение выше уровня плоскости 30 грузового отсека. Таким образом, механизм 1 управления доходит до закрепленного положения, в котором крепежный захват 29 занимает свое самое высокое положение относительно уровня плоскости 30 грузового отсека, при этом непреднамеренное выкатывание грузовых модулей из грузового отсека надежно предотвращено.
Таким образом, положение механизма 1 управления, показанное на фиг.11, вновь соответствует положению механизма управления, показанному на фиг.4.
При помощи устройства закрепления в соответствии с настоящим изобретением, которое при приведении в действие позволяет производить блокировку, грузовые модули, а в частности грузовые контейнеры или грузовые поддоны, могут быть повернуты в области двери грузового отсека, так как крепежные захваты, которые за счет ножной педали могут быть приведены в действие, так чтобы производить блокировку, могут находить любое желательное время в положении загрузки или в закрепленном положении, так что процедура поворота грузовых модулей может быть полностью завершена.
Позиционные обозначения
| название | год | авторы | номер документа |
|---|---|---|---|
| СТОПОРНЫЙ МЕХАНИЗМ ГРУЗОВОЙ ДВЕРИ САМОЛЕТА | 2008 |
|
RU2467921C2 |
| Приводное приспособление к моторной тележке для постановки и скатывания с нее вагонов | 1930 |
|
SU24444A1 |
| Замок для двери автомобиля | 1980 |
|
SU1111689A3 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ОТВОДНЫМ ВЫСТРЕЛИВАНИЕМ | 2009 |
|
RU2493789C2 |
| УЗЕЛ ОТДЕЛКИ ЩИТКА С СДВИЖНОЙ КРЫШКОЙ | 2016 |
|
RU2712731C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С БЛОКИРУЕМОЙ СИСТЕМОЙ ВЫСТРЕЛИВАНИЯ | 2009 |
|
RU2492820C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ШАРНИРНО-ПОВОРАЧИВАЕМЫМИ КОМПОНЕНТАМИ | 2009 |
|
RU2489100C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ЭЛЕМЕНТАМИ УПРАВЛЕНИЯ, ПРИГОДНЫМИ ДЛЯ РАБОТЫ ОДНОЙ РУКОЙ | 2009 |
|
RU2489099C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ МНОГОКРАТНОГО ИСПОЛЬЗОВАНИЯ (ВАРИАНТЫ) И СПОСОБ ЕГО ОБРАБОТКИ (ВАРИАНТЫ) | 2009 |
|
RU2488358C2 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ И ВЫДАЧИ ТОВАРНЫХ ПРЕДМЕТОВ | 2018 |
|
RU2672936C1 |
Изобретение относится к области грузовых авиаперевозок, более конкретно к устройству закрепления для системы загрузки в грузовой отсек самолета. Устройство закрепления содержит крепежный захват (29), расположенный в области двери грузового отсека, механизм (1) управления, содержащий стопорный ползун (3) и элемент приведения в действие в виде ножной педали. Ползун (2) включения перемещается для поворачивания крепежного захвата (29), в закрепленном положении крепежный захват (29) выступает над плоскостью (30) грузового отсека, что предотвращает выкатывание грузовых модулей. В положении загрузки крепежный захват (29) может за счет поворота опускаться ниже плоскости (30) грузового отсека, так что становится возможным выкатывание грузовых модулей. При помощи механизма (1) управления крепежный захват (29) за счет нажатия на ножную педаль первый раз блокируют в положении загрузки, а за счет нажатия на ножную педаль второй раз переводят из положения загрузки в закрепленное положение, при этом в закрепленном положении крепежный захват (29) может быть блокирован. Технический результат заключается в увеличении надежности устройства закрепления груза. 15 з.п. ф-лы, 11 ил.
1. Устройство закрепления для системы загрузки в грузовой отсек самолета, которое содержит по меньшей мере один крепежный захват (29), расположенный в области двери грузового отсека, механизм (1) управления, содержащий стопорный ползун (3) и элемент приведения в действие в виде ножной педали, при этом ползун (2) включения перемещается для поворачивания по меньшей мере одного крепежного захвата (29), причем в закрепленном положении по меньшей мере один имеющийся крепежный захват (29) выступает над плоскостью (30) грузового отсека, что предотвращает выкатывание грузовых модулей, расположенных на системе загрузки, из двери грузового отсека, причем в положении загрузки по меньшей мере один имеющийся крепежный захват (29) может за счет поворота опускаться ниже плоскости (30) грузового отсека, так что становится возможным выкатывание грузовых модулей, при этом при помощи механизма (1) управления по меньшей мере один имеющийся крепежный захват (29) за счет нажатия на ножную педаль первый раз блокируется в положении загрузки, а за счет нажатия на ножную педаль второй раз переводится из положения загрузки в закрепленное положение и может быть блокирован в закрепленном положении.
2. Устройство закрепления по п.1, в котором ползун (2) включения содержит отверстие (10) удлиненной формы, в котором установлен с возможностью перемещения стопорный штифт (11), расположенный на стопорном ползуне (3).
3. Устройство закрепления по п.1, в котором ползун (2) включения и стопорный ползун (3) расположены с возможностью скольжения в области плиты (5) основания.
4. Устройство закрепления по п.1, в котором ползун (2) включения выполнен с возможностью блокировки в положении загрузки при помощи фиксатора (17).
5. Устройство закрепления по п.1, в котором ползун (2) включения выполнен разблокируемым за счет опускания фиксатора (17).
6. Устройство закрепления по п.5, в котором фиксатор (17) расположен на плите (5) основания с возможностью поворота.
7. Устройство закрепления по п.5, в котором при помощи пружины (27) фиксатор (17) удерживается в контакте с обратной стороной (15) ползуна (2) включения.
8. Устройство закрепления по п.5, в котором фиксатор (17) содержит расцепляющий штифт (21).
9. Устройство закрепления по п.8, в котором расцепляющий штифт (21) упруго установлен в фиксаторе (21), главным образом перпендикулярно направлению движения стопорного ползуна (3).
10. Устройство закрепления по п.1, в котором стопорный ползун (3) содержит концевую область (12) с выемкой (13) и уклоном (14).
11. Устройство закрепления по одному из пп.8-10, в котором во время перехода от закрепленного положения к положению загрузки, при опущенном фиксаторе (17), расцепляющий штифт (21) скользит мимо обратной стороны стопорного ползуна (3), причем расцепляющий штифт (21) расположен в выемке (13) только когда фиксатор (17) запирается для остановки стопорного ползуна (3).
12. Устройство закрепления по п.10, в котором, во время скольжения назад стопорного ползуна (3) после достижения положения загрузки, расцепляющий штифт (21) скользит мимо поверхности (25) скольжения выемки (13) и уклона (14), и во время этого процесса принудительно входит, главным образом заподлицо, в боковую сторону (20) фиксатора (17), так что фиксатор (17) не разблокируется.
13. Устройство закрепления по п.12, в котором, во время скольжения вперед стопорного ползуна (3) для перехода от положения загрузки в закрепленное положение, расцепляющий штифт (21), который выступает над боковой стороной (20) фиксатора (17), скользит вдоль поверхности (22) скольжения уклона (14), причем фиксатор (17) опущен и ползун включения (2) разблокирован.
14. Устройство закрепления по п.1, в котором по меньшей мере один имеющийся крепежный захват (29) для введения грузовых модулей в грузовой отсек выполнен с возможностью перемещения грузовых модулей поверх него с одного конца.
15. Устройство закрепления по п.1, в котором ножная педаль спарена со стопорным ползуном (3) при помощи зубчатой передачи, в частности, при помощи рычажно-зубчатой передачи.
16. Устройство закрепления по п.1, в котором по меньшей мере один имеющийся крепежный захват спарен с ползуном включения (3) при помощи зубчатой передачи, в частности, при помощи рычажно-зубчатой передачи.
| US 3424410 А, 28.01.1969 | |||
| US 3933101 А, 20.01.1976 | |||
| ЗАМОК ДЛЯ КРЕПЛЕНИЯ КОНТЕЙНЕРОВ И ПОДДОНОВ | 1985 |
|
SU1297379A1 |
| US 3424410 А, 28.01.1969 | |||
| ЗАМОК ДЛЯ КРЕПЛЕНИЯ ПОДДОНОВ И КОНТЕЙНЕРОВ | 1977 |
|
SU656282A2 |
| US 3800713 А, 02.04.1974 | |||
| US 3995562 А, 07.12.1976. | |||

