Изобретение относится к машиностроению, а именно к устройствам для хранения товарных предметов с автоматической выдачей потребителю и может быть использовано для реализации штучных товаров в торговых автоматах.
Торговые автоматы для отпуска товарных предметов (далее в тексте именуемые как «предметы») традиционно реализованы в виде устанавливаемого в корпусе стеллажа с наклонными полками для хранения товаров, имеют средства удержания и механизм сброса штучного товара с полки, механизм транспортирования предмета с полки к месту его выдачи, а также блок управления. Так, в устройстве (JPH 0612563 (A), MERCHANDISE FEEDING-OUT DEVICE OF AUTOMATIC VENDING MACHINE, SANYO ELECTRIC CO, 21.01.1994, fig. 4) описано решение автомата для цилиндрического товара. Выпуск товара с наклонной полки осуществляется открытием поворотной звездочки, расположенной на нижнем краю полки, а после выкатывания товара с полки на грузовую площадку, по вертикальному транспортеру товар опускается к зоне выпуска. Такое перемещение обеспечивает подачу и выгрузку товара без повреждения его структуры.
В патенте (US 4483459 (A), Dispensing machine, MARS LTD, 20.11.1984) описан торговый автомат для раздачи бутылок или банок. Зона хранения образована множеством параллельных вертикально разнесенных наклонных полок, а на нижнем конце каждой полки находится приемник предметов. Держатель, установленный на каретке, перемещается вертикально мимо приемников и может принимать предмет (бутылку) от любой выбранной полки, управляя механизмом разблокировки, когда он находится рядом с необходимым приемником. Каретка берет выбранную бутылку на раздаточную станцию в верхней части машины и выкатывает бутылку в фиксированное положение, из которого она может быть забрана клиентом.
Другое устройство для хранения и выдачи товаров имеет установленный в корпусе стеллаж с наклонными полками, средства удержания и механизм сброса штучного товара с полки, механизм транспортирования товарного предмета с полки к месту его выдачи, а также блок управления (RU 13715 U1, ОАО "Счетмаш", 10.05.2000). Механизмы сброса и транспортирования могут быть выполнены в виде кареток с возможностью перемещения в горизонтальном и вертикальном направлениях, а средства удержания - упоры на концах полок. Недостаток устройства состоит в том, что оно предназначено только для предметов, имеющих прямоугольную форму. Кроме того, необходимость размещения полок стеллажа с большим наклоном (поскольку предмет должен самопроизвольно перемещаться при угле наклона, который меньше угла наклона полок) приводит к снижению эффективности использования верхнего и нижнего объемов полости стеллажа.
Известен торговый автомат для отпуска напитков в банках (бутылках) (US 6582037 (B1), Vending machine and a shelf support assembly, COCA COLA CO, 24.06.2003), который содержит шкаф с наклонными полками, установленными так, чтобы обеспечить качение или скольжение банок. По одной стенке шкафа установлен вертикальный лифт, имеющий транспортер для выгружаемой банки. Транспортер связан с управляемым бампером, который освобождает затвор удержания банки на полке, вследствие чего банка попадает на транспортер и далее переносится в бункер выдачи потребителю. Недостатком механизма освобождения в этом автомате является сложность конструкции затворов, рычаги которых взаимодействуют с бампером, а также ограниченность по типоразмерам банок с разным объемом.
Описаны различные модификации механизмов сброса и транспортирования. Так, в устройстве для выдачи товаров (RU 2446475 (С2), ХАУС ОФ ПРИНС А/С (DK), 27.03.2012) механизм подающего устройства перемещается по вертикальным и горизонтальным направляющим относительно каналов-накопителей. Затем нужная единица товара захватывается снимающим штифтом или штырем от подающего механизма через выемку или канавку в полке, приподнимается над упором, предотвращающим его выпадение при размещении, и выталкивается в передаточную камеру. Однако механизм предназначен для относительно мелких и легких товаров, например, пачек сигарет, поэтому снабжен пневматическим транспортером к месту выдачи.
Наиболее близким аналогом является автомат для хранения и выдачи товарных предметов (патент ЕР 0991037 (B1), WILLACH GMBH GEB [DE], 29.10.2003 - прототип). Автомат содержит корпус с прозрачной передней панелью, внутри которого размещен стеллаж в виде расположенных одна над другой наклонных плоских полок с перегородками и стопорами для предметов и сквозными прорезями, манипулятор с выдвигаемыми посредством криволинейных направляющих (копиров) прямолинейными подхватывающими элементами, размещенный на каретке связанной с механизмами вертикального и горизонтального перемещения, желоб для приема сбрасываемого предмета, ниши выдачи с заслонкой, а также блок управления. Такой автомат, как указывается в описании, предназначен для отпуска небольших плоских предметов (например, аптечных коробок и пачек), соответственно допускает транспортирование по желобу. Освобождение предметов от стопоров осуществляется подхватывающими элементами при их подсовывании под извлекаемый предмет. Прототип имеет следующие основные недостатки:
- сложную конструкцию размещенных на исполнительном органе средств (ползуна, перемещаемого по копиру), а следовательно, невысокую надежность;
- возможность размещения на полках только товарных предметов, размер которых в направлении, перпендикулярном направлению перемещения предмета по полке, лежит в узком диапазоне.
Действительно, для того, чтобы за счет перемещения расположенных на ползуне двух выдвигаемых/задвигаемых элементов удлиненной формы обеспечить не только подведение их через соответствующую каждому из них сквозную прорезь (выполненную со стороны нижнего края каждого отсека полок стеллажа) под выбранный предмет, но и подхватывание его (при одновременном дальнейшем подсовывании этих элементов под выбранный предмет) на высоту, соответствующую высоте стопорного элемента, в прототипе используется копир, выполненный в виде двух пар оппозитно расположенных щелевых прорезей. Они обеспечивают различную траекторию перемещения ползуна соответственно при перемещении выдвигаемых элементов в направлении к полкам стеллажа и в обратном направлении. Использование ползуна, перемещаемого по копиру, приводит не только к усложнению устройства, но и к повышению затрат и снижению надежности. Что касается использования двух выдвигаемых элементов, размещенных относительно друг друга на фиксированном расстоянии, то это не обеспечивает возможности размещения на полках стеллажа предметов, размер которых существенно различается в направлении, перпендикулярном направлению самопроизвольного перемещения их по полкам. Кроме того, с одной стороны, в процессе подсовывания выдвигаемых элементов под извлекаемый предмет может быть нарушена целостность упаковки извлекаемого предмета. С другой стороны, выполнение каждого выдвигаемого элемента в виде пластины удлиненной формы накладывает существенные ограничения на величину веса извлекаемого предмета, поскольку увеличение толщины пластин приведет к затруднениям при подсовывании их под извлекаемый предмет. Выполнение привода зубчато-реечной передачи в виде шлицевого вала приводит не только к увеличению металлоемкости, но и к дополнительным люфтам.
Настоящее изобретение направлено на решение технической проблемы усовершенствования системы и упрощения средств перегрузки предметов с полок при расширении размерного ряда предметов по ширине полок.
Патентуемое устройство для хранения и выдачи товарных предметов содержит каркас, стеллаж для предметов с наклонными полками, имеющими прорези и стопоры, манипулятор, связанный с механизмами вертикального и горизонтального перемещения с приводами, размещенные на каретке манипулятора выдвигаемые прямолинейные подхватывающие элементы для поштучного извлечения с полки предметов, приемник предмета, нишу выдачи и блок управления.
Отличие состоит в том, что приемник предмета размещен на каретке манипулятора и выполнен в виде удлиненного элемента вогнутой формы в виде части цилиндрической поверхности, фокус которой обращен в сторону подхватывающих элементов. Подхватывающие элементы объединены в независимо выдвигаемые секции, закрепленные на индивидуальных ходовых элементах приводов реверсного прямолинейного перемещения, головные оконечности подхватывающих элементов выполнены с возможностью вхождения и продвижения по прорезям в полках в процессе вертикального перемещения каретки манипулятора, а концевые участки указанных секций соединены между собой, размещены со стороны приемника предмета и сопряжены с обеспечением выкатывания предмета по подхватывающим элементам в упомянутый приемник, при этом каретка манипулятора выполнена с возможностью наклона в вертикальной плоскости для выгрузки предмета из приемника в нишу выдачи.
Устройство может характеризоваться тем, что выдвигаемые секции подхватывающих элементов закреплены на каретке манипулятора с наклоном, который не меньше наклона в ту же сторону полок стеллажа.
Устройство может характеризоваться и тем, что каждая выдвигаемая секция содержит 1-10 подхватывающих элементов, при этом концевые участки секций соединены между собой перемычками, не выступающими за головные оконечности подхватывающих элементов.
Устройство может характеризоваться также тем, что подхватывающие элементы выполнены в виде параллельных стержней или пластин удлиненной формы, а перемычки на концевых участках секций выполнены заодно с указанными стержнями или пластинами.
Устройство может характеризоваться также и тем, что каретка манипулятора установлена на несущем элементе, выполненном в виде вертикально расположенной пластины или балки, с возможностью горизонтального перемещения по направляющей, концы которой присоединены к ходовым элементам в виде ползунов, размещенных на двух расположенных напротив друг друга и параллельных вертикальных направляющих, закрепленных на боковых стойках каркаса.
Устройство может характеризоваться и тем, что механизм реверсного прямолинейного перемещения секций выдвигаемых подхватывающих элементов выполнен в виде шагового электродвигателя с закрепленным на его валу зубчатым колесом, находящимся в зацеплении с зубчатой рейкой, образованной на тыльной стороне одного из подхватывающих элементов.
Устройство может характеризоваться, кроме того, тем, что длина прорези составляет от 0,8 до 0,97 максимального размера предмета в направлении, совпадающем с направлением выкатывания предмета с полки по подхватывающим элементам, а ширина прорези составляет 2-5 ширины подхватывающих элементов.
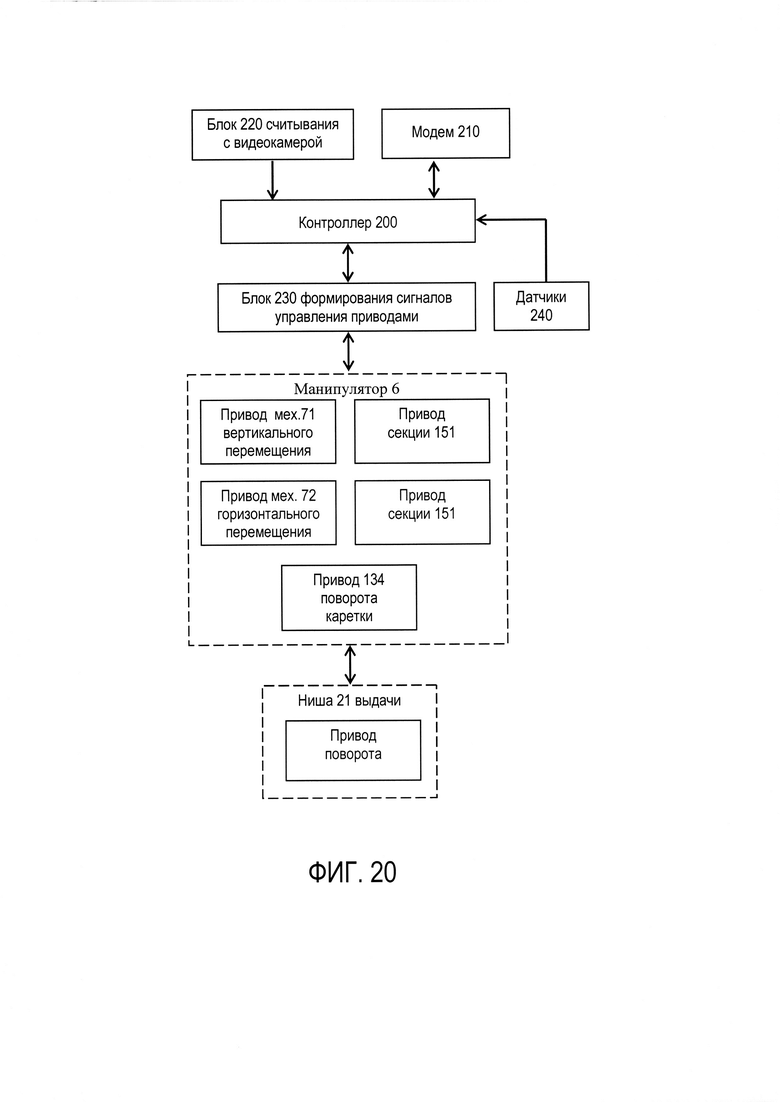
Устройство может характеризоваться также и тем, что блок управления содержит контроллер, модем для связи с процессинговым центром, блок считывания заказа с видеокамерой, блок формирования сигналов управления на запуск и останов приводов, датчики контроля, связанные с возможностью передачи информации и управления с приводами вертикального и горизонтального перемещения манипулятора, приводами секций подхватывающих элементов и приводом поворота каретки.
Устройство может характеризоваться, кроме того, тем, что предметы включают, но не исчерпываются бутылками с жидкостью, банками с жидкостью, контейнерами с жидкостью, где жидкость представляет собой напитки.
Технический результат изобретения - упрощение конструкции манипулятора и повышение надежности при одновременном обеспечении возможности размещения и выдачи товарных предметов, размер которых в направлении, перпендикулярном направлению их самопроизвольного перемещения по полкам, может изменяться в широком диапазоне (в разы).
Преимущество патентуемого изобретения, по сравнению с прототипом, заключается не только в упрощении конструкции - вместо механизма, осуществляющего в чередующейся последовательности прямолинейное перемещение выдвигаемых элементов и перемещение их в том же направлении с одновременным перемещением вверх, использование известных из уровня техники механизмов реверсного прямолинейного перемещения группы выдвигаемых элементов, но и в обеспечении возможности размещения на полках стеллажа предметов с существенно различающимися размерами.
В дальнейшем настоящее изобретение поясняется подробным, со ссылками на чертежи описанием конкретных примеров, которые, однако, не являются единственно возможными, но наглядно демонстрируют возможность достижения указанного технического результата патентуемой совокупностью существенных признаков.
Существо изобретения поясняется на чертежах, где:
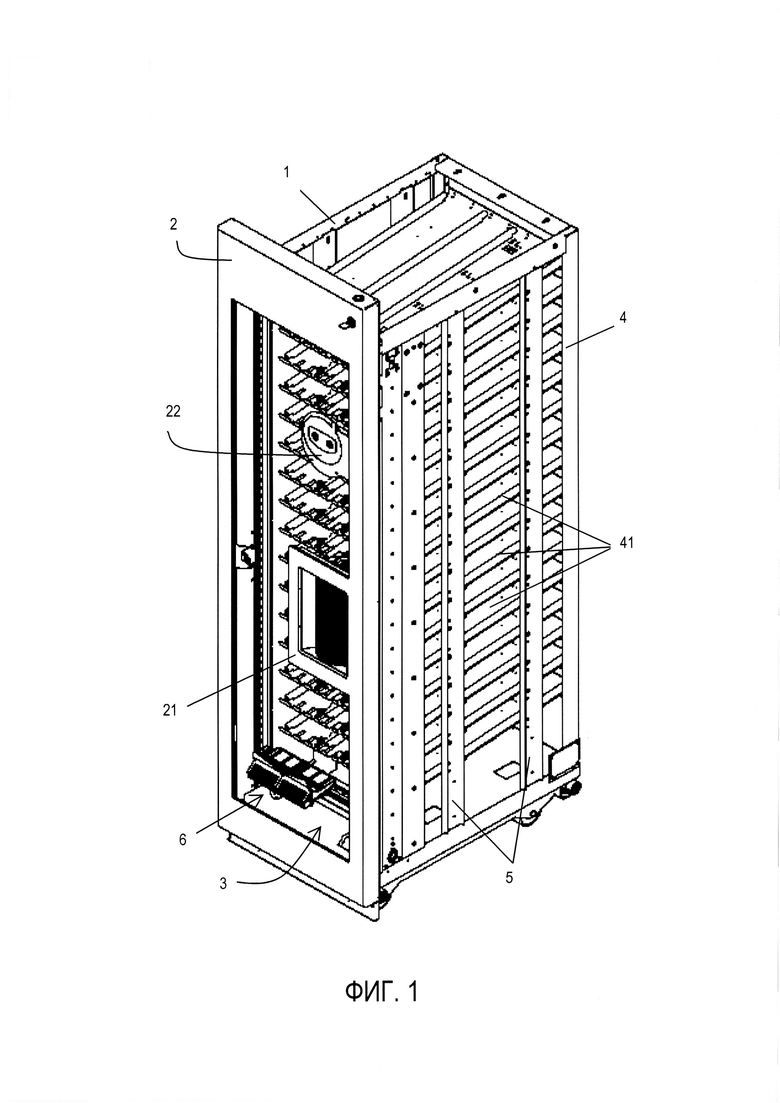
фиг. 1 - устройство в сборе, в изометрии;
фиг. 2 - вид сбоку, с левой стороны;
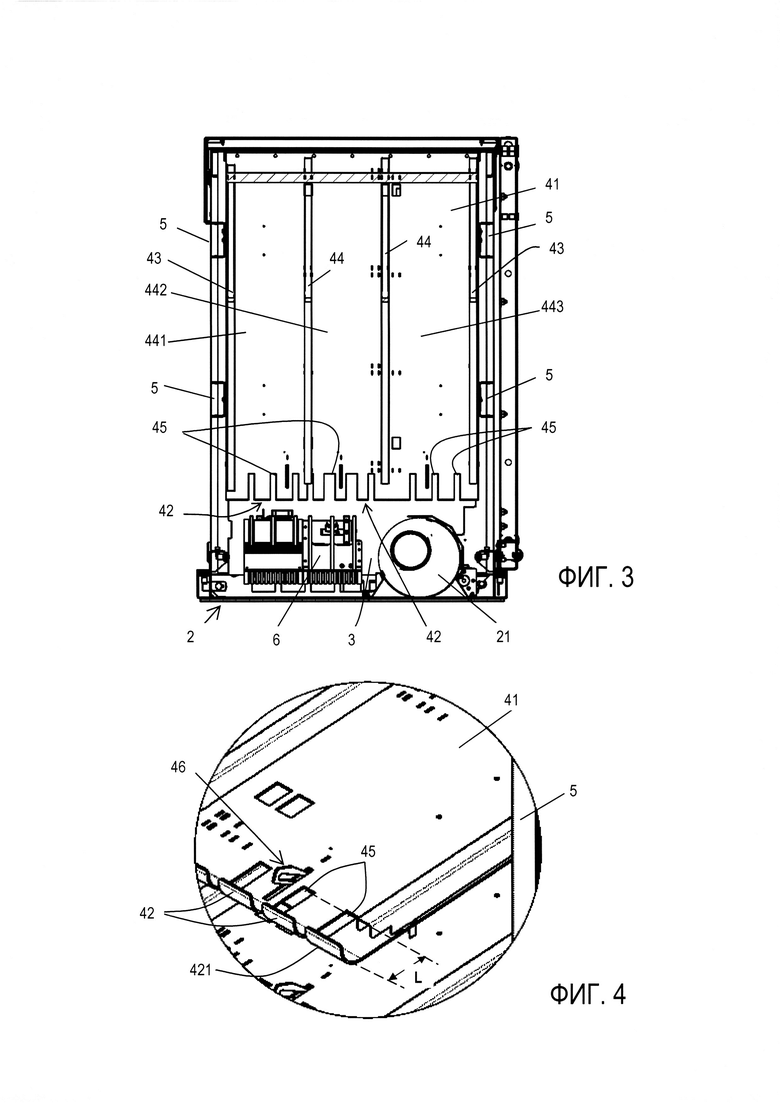
фиг. 3 - вид в горизонтальном сечении, сверху;
фиг. 4 - вид стопорных элементов на полках;
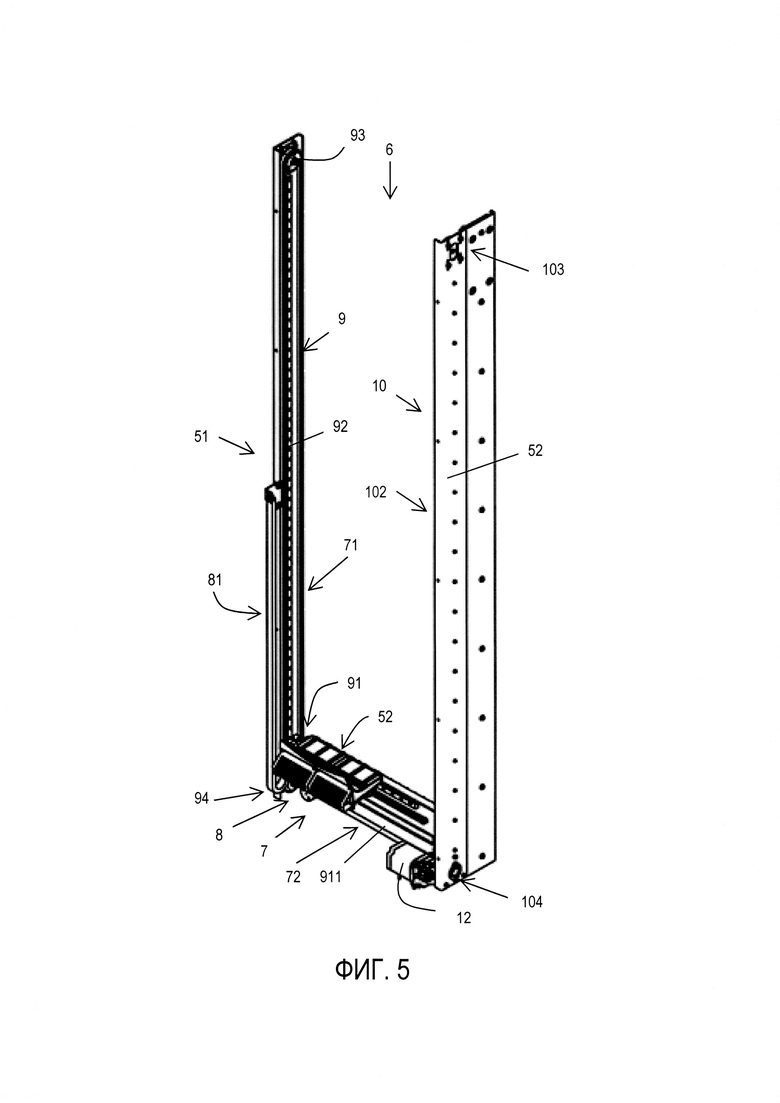
фиг. 5 - узел манипулятора, общий вид;
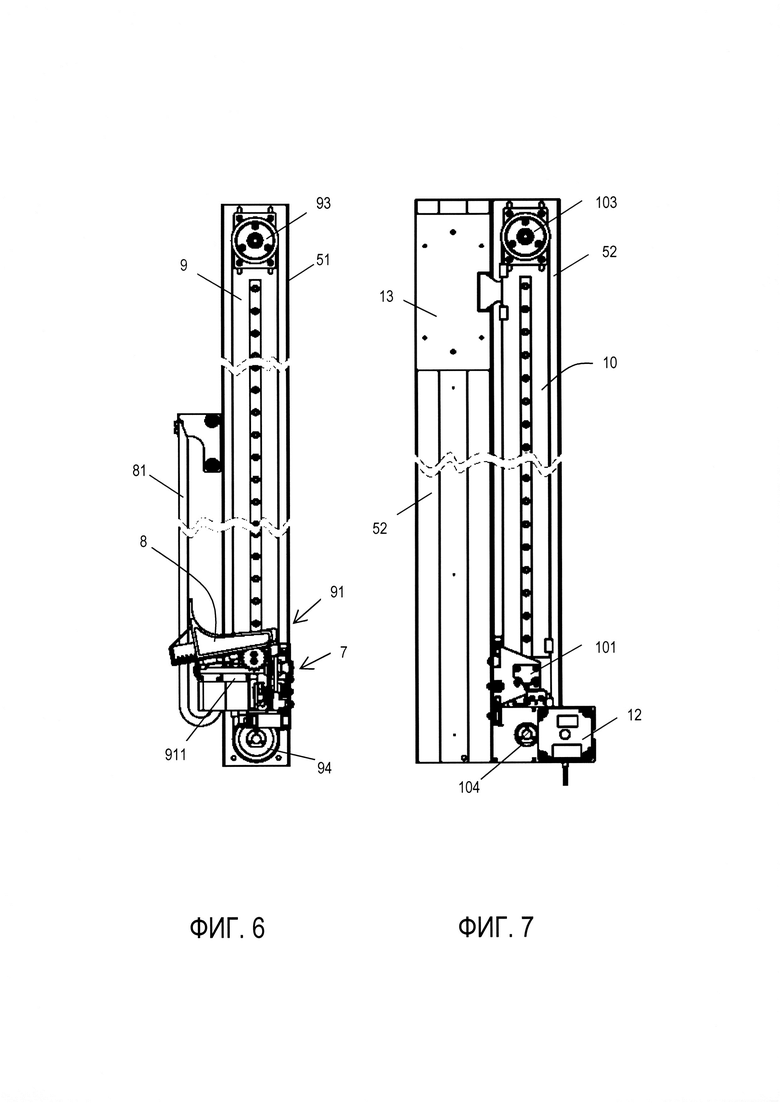
фиг. 6, 7 - узел манипулятора, вид изнутри на левую и правую стороны;
фиг. 8 - исполнительное звено манипулятора, вид со стороны передней панели;
фиг. 9 - то же, что на фиг. 8, вид сверху;
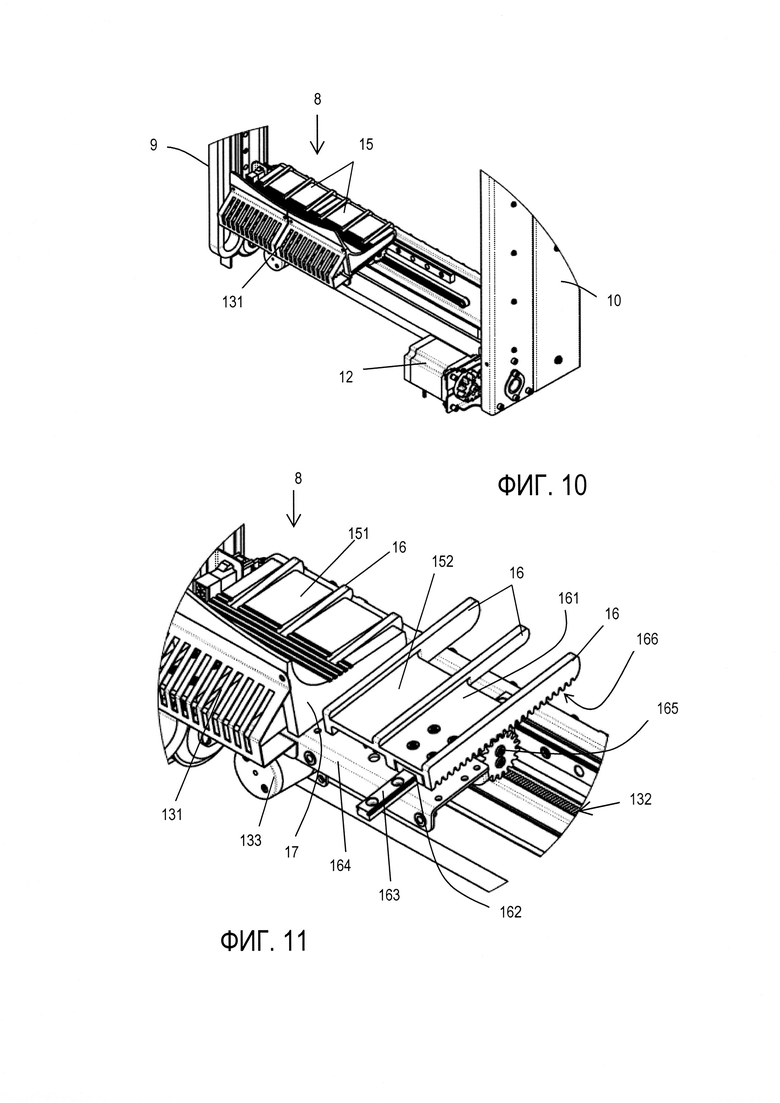
фиг. 10 - исполнительное звено манипулятора, в изометрии;
фиг. 11 - то же, что на фиг. 10, с выдвинутыми подхватывающими элементами;
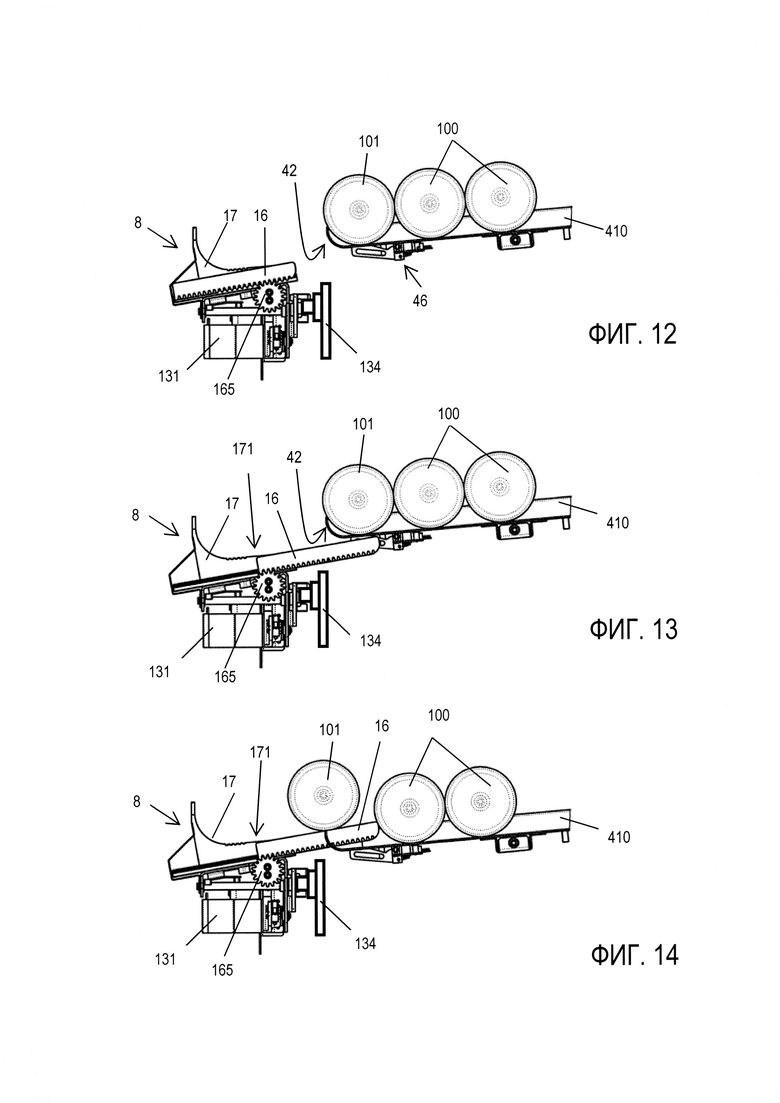
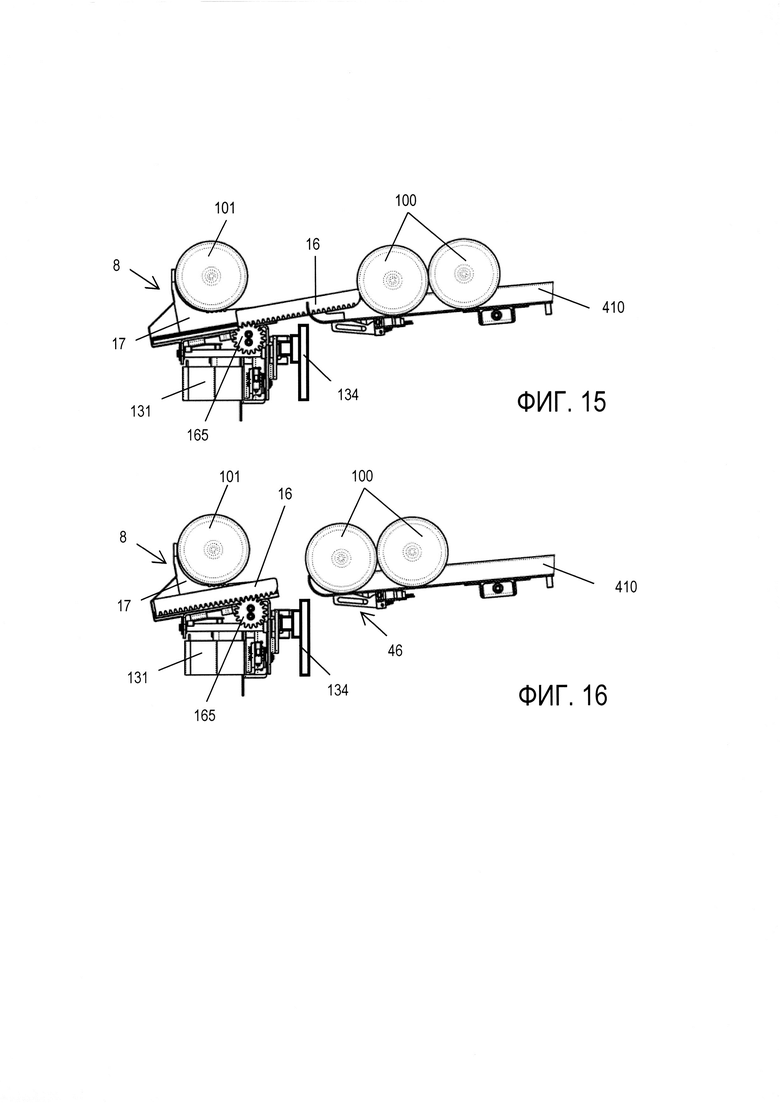
фиг. 12-16 - функционирование манипулятора при перегрузке предмета с полки в приемник;
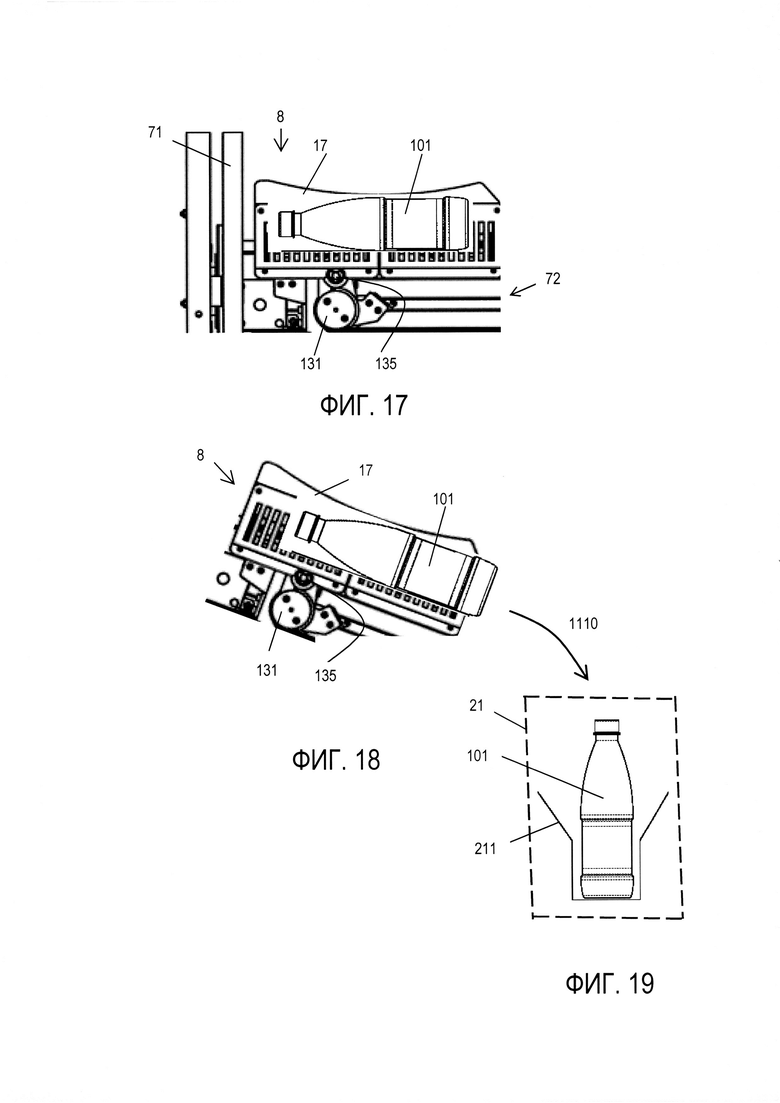
фиг. 17-19 - функционирование манипулятора при перегрузке предмета из приемника в нишу выдачи;
фиг. 20 - блок-схема системы управления.
Устройство для хранения и выдачи товарных предметов содержит размещаемый в корпусе (на чертежах не показан) и, предпочтительно, смонтированный на колесах вкатной каркас 1 прямоугольной формы с передней панелью 2, закрывающей отверстие в корпусе (фиг. 1) с полостью 3. На каркасе 1 размещен стеллаж 4 в виде расположенных одна над другой плоских полок 41 с ровной, предпочтительно, гладкой верхней поверхностью. Полки 41 выполнены из листового металла и образуют хранилище товарных предметов. С передней панели 2 обеспечивается доступ к нише 21 выдачи товаров, размещенной в полости 3. На панели 2 помещается и считывающее устройство 22 системы управления.
Полки 41 закреплены на оппозитно расположенных боковых вертикальных стойках 5 с наклоном, обеспечивающим самопроизвольное перемещение (качение) предметов под действием собственного веса, в диапазоне углов 5-15°. Нижние концы полок 41 имеют стопорные элементы 42, удерживающие предметы от падения с полок (фиг. 2). Элементы (колеса, ролики), обеспечивающие перемещение как по полу, так при закатывании в корпус, размещены в нижней части и условно показаны поз.11.
На фиг. 3 показана компоновка элементов конструкции в горизонтальном сечении, сверху. Каждая полка 41 выполнена как с обращенными вверх боковыми бортиками 43, так и с расположенной параллельно им, по меньшей мере, одной перегородкой 44, делящей верхнюю рабочую поверхность каждой полки 41 на наклонно расположенные отдельные отсеки (лотки). Так, на чертеже фиг. 3 двумя перегородками 44 на полке 41 образованы три отсека 441, 442, 443. По меньшей мере, одна перегородка 44 на каждой полке 41 размещена с обеспечением возможности перемещения ее в поперечном направлении и фиксации в требуемом положении, а также съема при необходимости. Со стороны нижнего края каждого отсека и, предпочтительно, симметрично относительно соответствующих ему перегородок 44 расположены прямоугольные сквозные прорези 45, при этом каждая прорезь 45 выполнена как по всей высоте стопорного элемента 42, так и вглубь самой полки 41. В простейшем случае, стопорные элементы 42 представляют собой упоры 421, образованные загнутыми вверх концами листового материала, из которого выполнены полки 41 (фиг. 4). Указанные прорези 45 предназначены для взаимодействия с манипулятором 6, расположенным в полости 3 между стеллажом 4 и передней панелью 2. На полках могут располагаться датчики 46 наличия товаров на полках, например, нажимного типа.
На фиг. 5 показан узел манипулятора 6, общий вид, в изометрии. Манипулятор 6 предназначен для отбора заданного предмета с полки 41, перемещения предмета к нише 21 выдачи и разгрузки предмета в нишу.
Манипулятор 6 содержит механизм 7 двухкоординатного независимого перемещения: механизм 71 перемещения в вертикальном направлении и размещенный на нем механизм 72 перемещения в горизонтальном направлении. На механизме 72 установлено исполнительное звено 8, конструкция которого будет раскрыта ниже. Электрическая связь манипулятора 6 с системой управления осуществляется по кабелю 81.
На фиг. 6, 7 более подробно показана конструкция вертикального привода манипулятора: вид изнутри на левую и правую стороны привода.
Механизм 7 образован в виде двух, расположенных напротив друг друга и параллельных вертикальных направляющих 9 и 10, закрепленных на боковых стойках 51 и 52 каркаса 1. Направляющие 9, 10 обеспечивают возможность скользящего продольного перемещения по ним несущего элемента 911, на котором установлено исполнительное звено 8. Соответственно, балка несущего элемента 911 на обоих концах имеет ходовые элементы в виде ползунов 91, 101. Каждая направляющая 9,10 может быть выполнена в виде линейной шариковой передачи с двумя продольными пазами, расположенными оппозитно на ее боковых сторонах, с обеспечением возможности взаимодействия шариков с пазами упомянутой передачи. Такие конструктивные решения известны из уровня техники и использованы по известному назначению.
Перемещение несущего элемента 911 осуществляется посредством первого и второго ременного механизма преобразования вращательного движения в прямолинейное перемещение, каждый из которых содержит связанные между собой посредством приводного зубчатого ремня 92(102) верхний 93(103) и нижний 94(104) ролики. Ролики имеют одинаковый диаметр и установлены с возможностью вращения вокруг соответствующей каждому из них горизонтально расположенной оси, параллельной передней панели 2. При этом нижние ролики 94(104) или связаны с соответствующим каждому из них шаговым электродвигателем, или закреплены на общей горизонтальной оси, которая посредством, например, зубчатой передачи, связана с выходным валом общего шагового электродвигателя 12 (фиг. 7). На верхней части направляющей 10 располагается механизм 13 противовеса.
Механизм 7 перемещения в вертикальном направлении может быть выполнен и аналогично тому, как это описано в прототипе (патент ЕР 0991037): в виде двух вертикальных ходовых винтов, установленных с возможностью вращения вокруг собственной оси и связанных, например, с общим шаговым электродвигателем. При этом размещенные на каждом винте ходовые гайки прикреплены к несущему элементу 911, выполненному в виде вертикально расположенной пластины или балки.
На фиг. 8-11 показана конструкция исполнительного звена 8 манипулятора 6.
На обращенной к передней панели 2 поверхности вертикально расположенной пластины 111 несущего элемента 911 размещен механизм 112 перемещения исполнительного звена 8 в горизонтальном направлении. Механизм 112 включает закрепленную на поверхности пластины 111 горизонтальную направляющую 13, на которой с возможностью скользящего продольного перемещения размещена каретка 131. Движение каретки 131 обеспечивается размещенным продольно с несущим элементом 911 зубчатым ремнем 132, связанным с шаговым электродвигателем 133. Каретка 131 связана с приводом 134 установлена на горизонтальной оси 135, обеспечивающей наклон каретки 131 в вертикальной плоскости для выгрузки предмета в нишу 21 выдачи.
На каретке 131 установлены, по меньшей мере, две секции 151, 152 выдвигаемых подхватывающих элементов 16, выполненных в виде параллельных стержней или пластин удлиненной формы (фиг. 10, 11). Концевые участки элементов 16 соединены между собой, например, посредством выполненных за одно целое с ними перемычек 161 таким образом, чтобы перемычки не препятствовали перемещению по ним скатываемых предметов.
Число элементов 16 в одной секции 151, 152 составляет 1-10 штук и определяется размером предмета в направлении, перпендикулярном направлению его перемещения по полке 41 под действием собственного веса. Каждая секция 151, 152 закреплена на соответствующем ей ходовом элементе 162. Элемент 162 с возможностью скользящего продольного перемещения размещен на направляющей 163, которая расположена в плоскости, перпендикулярной передней панели 2 и закреплена на основании 164 с наклоном, который не меньше наклона в ту же сторону полок 41 стеллажа.
Каждая секция 151, 152 (соответствующий ей ходовой элемент 162) снабжена механизмом реверсного прямолинейного перемещения. Он выполнен в виде шагового электродвигателя 165 с закрепленным на его валу зубчатым колесом, находящимся в зацеплении с зубчатой рейкой 166, выполненной на тыльной стороне одного из элементов 16.
Количество прямоугольных сквозных прорезей 45 в каждом отсеке 441, 442, 443 каждой полки 41 равно или больше количества подхватывающих элементов 16 в тех секциях 151 и/или 152, с помощью которых осуществляется извлечение находящегося в этом отсеке предмета. Прорези 45 расположены относительно друг друга с шагом, кратным шагу (расстоянию между продольными осями симметрии) между элементами 16 или секциями 151, 152, если каждая из них содержит по одному элементу 16. В принципе прорези 45 могут быть расположены с равным шагом по всей ширине полки.
Прорези 45 выполнены с шириной, превышающей поперечный размер элементов 16 на величину двухстороннего гарантированного зазора, что полностью исключает их заедание в прорезях. Что касается длины прямоугольных сквозных прорезей 45 и соответственно длины рабочего хода элементов 16 секций 151, 152, то они определяются исходя из следующего.
При размещении на полках 41 предметов с существенно различающимися размерами (например, от полутора до двух с половиной раз) по ширине полок 41, механизм реверсного прямолинейного перемещения может быть выполнен с обеспечением как бесступенчатого, так и ступенчатого изменения длины рабочего хода элементов 16. При этом число ступеней определяется количеством типоразмеров предметов. Прорези 45 могут быть выполнены с длиной L, составляющей от 0,8 до 0,97 максимального размера предмета в направлении длины наклонной полки 41. Примерно в таком же соотношении должно находиться и максимальное значение длины хода элементов 16.
Таким образом, исходя из размеров загруженных на полки предметов, устройство активирует либо только секцию 151, либо только секцию 152, либо обе секции 151 и 152 одновременно, что позволяет снять ограничения на длину предметов. При числе секций более двух, например, трех, на полках 41 можно разместить предметы шести типоразмеров при оптимизации числа перегородок 44.
На каретке 131 установлен также приемник 17 извлекаемого с полки 41 предмета, который выполнен в виде удлиненного элемента вогнутой формы по типу части цилиндрической поверхности, фокус которой обращен в сторону подхватывающих элементов 16. Общая длина приемника 17 по продольной оси примерно равна суммарной ширине секций 151 и 152. Прилежащая к каретке 131 часть 171 приемника 17 может быть сопряжена с нижней частью приемника 17 для обеспечения беспрепятственного перемещения (скатывания) предмета с полки 41 по подхватывающим элементам 16.
На фиг. 12-16 показано функционирование исполнительного звена 8 в процессе перегрузки предметов 100 с полки 410 в приемник 17. Сначала проводится позиционирование: каретка 131 подводится к полке 410, где находится заданный предмет 101 (фиг. 12). Затем производится выдвижение секций 151 и 152 или одной из них таким образом, чтобы подхватывающие элементы 16 оказались ниже предусмотренных для них пазов 45 полки 410 в зоне нахождения предмета 101 (фиг. 13). После этого производится вертикальное перемещение каретки 131 таким образом, чтобы верхняя грань элемента 16 оказалась на уровне или выше среза стопорных элементов 42 (упоров 421, фиг. 4), что обеспечивает беспрепятственное скольжение предмета 101 под действием собственного веса по наклонным подхватывающим элементам 16 в приемник 17 (фиг. 14-15). Процесс завершается возвращением секций 151,152 с элементами 16 в исходное положение (фиг. 16).
На фиг. 17-19 показано функционирование манипулятора при перегрузке предмета 101 из приемника 17 в нишу 21 выдачи. Сначала посредством механизмов 71, 72 перемещения в вертикальном и горизонтальном направлениях исполнительное звено 8 позиционируют в зоне размещения ниши 21 выдачи (фиг. 17). Затем, посредством привода 134 поворота каретки 131 относительно оси 135, приемник 17 наклоняют на угол, обеспечивающий перемещение предмета 101 под действием собственного веса (траектория перемещения показана стрелкой 1110) и загрузку его в нишу 21 выдачи через воронку ловителя 211. В результате чего, при открытии ниши 21, если она имеет поворотный корпус с окном, заданный предмет 101 становится доступным потребителю.
Таким образом, многофункциональное исполнительное звено 8 манипулятора 6 обеспечивает автоматическое нахождение и снятие с полки заданного предмета, помещение его в приемник, перемещение приемника в зону размещения ниши выдачи и разгрузку предмета в нишу выдачи, при этом устройство не имеет ограничений на длину предмета по ширине полки.
Укрупненная блок-схема системы управления приведена на фиг. 20.
Блок управления содержит контроллер 200, модем 210 для связи с процессинговым центром, блок 220 считывания заказа, блок 230 формирования сигналов управления на запуск и останов приводов, датчики 240 контроля, соединенные с возможностью передачи информации и управления с приводами функциональных узлов манипулятор 6: приводами механизмов 71,72 вертикального и горизонтального перемещения балки несущего элемента 11, приводами секций 151, 152 подхватывающих элементов и приводом 134 поворота каретки 131 вокруг оси 135.
Датчики 240 могут включать датчики 46 наличия товаров на полках, датчики наличия предмета в нише 21 и другие датчики, обеспечивающие функционирование устройства, известные из уровня техники, однако не касающиеся существа данного изобретения. Если вследствие покупки товар оказывается распроданным, то на модем 210 может быть передана информация о блокировании дальнейшего выбора данной единицы товара до тех пор, пока она снова не станет доступной на полках. Учет целесообразно вести по исходному числу предметов на полках.
Устройство функционирует следующим образом.
Пользователь посредством размещенных на передней панели 2 средств (из числа известных и выполняющих функцию интерфейса для пользователя, в частности, считывающее устройство 22) формирует сигнал запроса на выдачу выбранного им предмета 101. Далее упомянутый сигнал запроса поступает на вход контроллера 200 и блока 230, в котором формируются сигналы, поступающие на приводы механизмов 71, 72. В результате осуществляется двухкоординатное позиционирование манипулятора 6 относительно той полки 41, в одном из отсеков 441, 442, 443, которой размещен выбранный пользователем предмет 101. При этом подхватывающие элементы секций 151 и/или 152 должны размещаться напротив сквозных прорезей 45.
Далее с контроллера 200 и блока 230 поступает сигнал на включение шаговых электродвигателей одного или обоих приводов секций 151, 152 исходя из известного заранее размера предмета 101. Вследствие этого подхватывающие элементы 16 выдвигаются из каретки 131 и позиционируются под пазами 45 полки 410 (фиг. 13). Длина хода, на которую выдвигаются подхватывающие элементы 16, соответствует типоразмеру извлекаемого с полки 41 предмета 101 и может быть установлена как заранее, так и регулироваться.
При достижении необходимой длины хода элементов 16 осуществляется формирование управляющего сигнала на останов перемещения (выдвижения) элементов 16 и на перемещение вверх исполнительного звена 8 приводом механизма 71 вертикального перемещения на расстояние, которое не меньше высоты стопорных элементов 42 (фиг. 14).
При перемещении манипулятора 6 вверх выдвинутые в направлении соответствующего отсека соответствующей полки 410 элементы 16, с одной стороны, взаимодействуя с соответствующим каждому из них участком нижней поверхности предмета 101 осуществляют его подхват (подъем, поддержание снизу), а, с другой стороны, своими торцами удерживают выше расположенные в данном отсеке предметы. Когда дно извлекаемого предмета 101 достигнет уровня верхнего края стопорного элемента 42, то под действием собственного веса извлекаемый предмет 101, скользя по верхним поверхностям элементов 16, переместится на приемную поверхность приемника 17 (фиг. 14, 15). После этого, осуществляется возврат подхватывающих элементов 16 задействованных секций 151, 152 в исходное положение (фиг. 16), а приемник 17 переводится на позицию доставки в нишу 21 выдачи.
Далее по сигналам с блока управления с помощью приводов механизмов 71, 72 перемещения в вертикальном и горизонтальном направлениях осуществляется транспортировка и позиционирование приемника 17 с предметом 101 в зону нахождения ниши 21 выдачи. Далее посредством соответствующего электродвигателя привода 134 осуществляется поворот (наклон) приемника 17 вокруг оси 135, перпендикулярной передней панели 2, на угол, обеспечивающий самопроизвольное перемещение предмета 101 в приемную воронку 211 ниши 21 выдачи (фиг. 17-19).
После сброса предмета 101 с приемника 17 осуществляется реверсивный поворот манипулятора 6 в первоначальное положение, а затем посредством механизма вертикального перемещения и механизма горизонтального перемещения осуществляется перемещение позиционируемого манипулятора 6 в положение, соответствующее его стартовому положению, в котором он находится до момента поступления на блок 220 считывания заказа следующего запроса на выдачу выбранного предмета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Торговый автомат для выдачи штучных товаров | 2022 |
|
RU2796049C1 |
| ТОРГОВЫЙ АВТОМАТ И УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ТОВАРОВ ДЛЯ ИСПОЛЬЗОВАНИЯ В НЕМ | 2015 |
|
RU2583773C1 |
| Вендинговый аппарат для автоматической продажи готовых пищевых продуктов | 2023 |
|
RU2816568C1 |
| ХНННЕС-КА БИБЛИОТЕКА | 1971 |
|
SU304938A1 |
| ТОРГОВЫЙ АВТОМАТ | 2013 |
|
RU2533440C1 |
| УСТАНОВКА ДЛЯ ПРИЕМА, СКЛАДИРОВАНИЯ И ВЫДАЧИ СКВАЖИННЫХ ТРУБ И ШТАНГ ПРИ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЯХ | 2000 |
|
RU2170325C1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| АГРЕГАТ ДЛЯ ПОДАЧИ ТОВАРОВ В ПОДДОНАХ И ИМ ПОДОБНОЙ ТАРЕ ИЗ ПОДСОБНЫХ ПОМЕЩЕНИЙ В ТОРГОВЫЙ ЗАЛ | 1969 |
|
SU239848A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2024423C1 |
| Механизированный стеллаж | 1982 |
|
SU1022875A1 |


Устройство для хранения и выдачи товарных предметов содержит каркас, стеллаж для предметов с наклонными полками, имеющими прорези и стопоры, манипулятор, связанный с механизмами вертикального и горизонтального перемещения с приводами, размещенные на каретке манипулятора выдвигаемые прямолинейные подхватывающие элементы для поштучного извлечения с полки предметов, приемник предмета, нишу выдачи и блок управления. Приемник предмета размещен на каретке манипулятора и выполнен в виде удлиненного элемента вогнутой формы в виде части цилиндрической поверхности, фокус которой обращен в сторону подхватывающих элементов. Подхватывающие элементы объединены в независимо выдвигаемые секции, закрепленные на индивидуальных ходовых элементах приводов реверсного прямолинейного перемещения. Головные оконечности подхватывающих элементов выполнены с возможностью вхождения и продвижения по прорезям в полках в процессе вертикального перемещения каретки манипулятора, а концевые участки указанных секций соединены между собой, размещены со стороны приемника предмета и сопряжены с обеспечением выкатывания предмета по подхватывающим элементам в упомянутый приемник. Каретка манипулятора выполнена с возможностью наклона в вертикальной плоскости для выгрузки предмета из приемника в нишу выдачи. Технический результат изобретения - упрощение конструкции манипулятора и повышение надежности при одновременном обеспечении возможности размещения и выдачи товарных предметов, размер которых в направлении, перпендикулярном направлению их самопроизвольного перемещения по полкам, может изменяться в широком диапазоне (в разы). 8 з.п. ф-лы, 20 ил.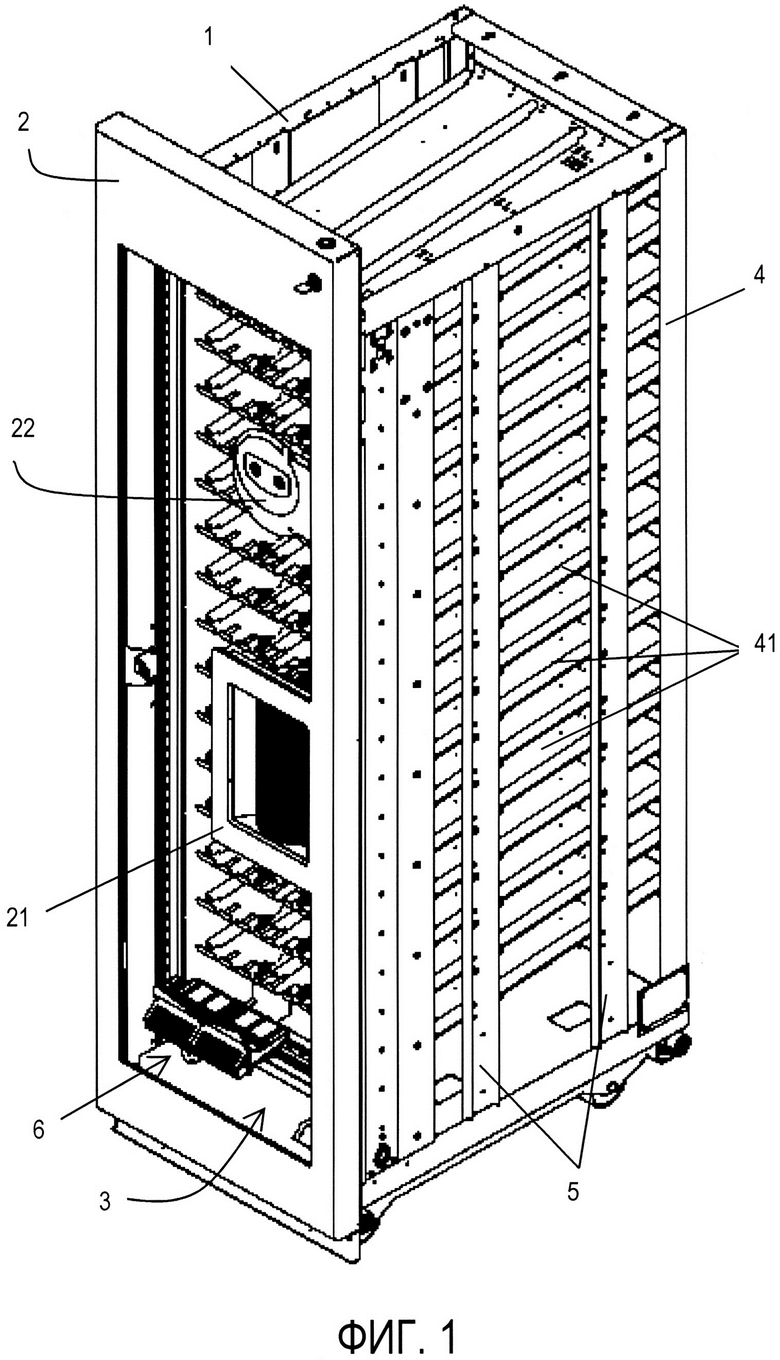
1. Устройство для хранения и выдачи товарных предметов, содержащее каркас, стеллаж для предметов с наклонными полками, имеющими прорези и стопоры, манипулятор, связанный с механизмами вертикального и горизонтального перемещения с приводами, размещенные на каретке манипулятора выдвигаемые прямолинейные подхватывающие элементы для поштучного извлечения с полки предметов, приемник предмета, нишу выдачи и блок управления,
отличающееся тем, что
приемник предмета размещен на каретке манипулятора и выполнен в виде удлиненного элемента вогнутой формы в виде части цилиндрической поверхности, фокус которой обращен в сторону подхватывающих элементов;
подхватывающие элементы объединены в независимо выдвигаемые секции, закрепленные на индивидуальных ходовых элементах приводов реверсного прямолинейного перемещения, головные оконечности подхватывающих элементов выполнены с возможностью вхождения и продвижения по прорезям в полках в процессе вертикального перемещения каретки манипулятора, а концевые участки указанных секций соединены между собой, размещены со стороны приемника предмета и сопряжены с обеспечением выкатывания предмета по подхватывающим элементам в упомянутый приемник, при этом каретка манипулятора выполнена с возможностью наклона в вертикальной плоскости для выгрузки предмета из приемника в нишу выдачи.
2. Устройство по п. 1, отличающееся тем, что выдвигаемые секции подхватывающих элементов закреплены на каретке манипулятора с наклоном, который не меньше наклона в ту же сторону полок стеллажа.
3. Устройство по п. 1, отличающееся тем, что каждая выдвигаемая секция содержит 1-10 подхватывающих элементов, при этом концевые участки секций соединены между собой перемычками, не выступающими за головные оконечности подхватывающих элементов.
4. Устройство по п. 3, отличающееся тем, что подхватывающие элементы выполнены в виде параллельных стержней или пластин удлиненной формы, а перемычки на концевых участках секций выполнены заодно с указанными стержнями или пластинами.
5. Устройство по п. 1, отличающееся тем, что каретка манипулятора установлена на несущем элементе, выполненном в виде вертикально расположенной пластины или балки, с возможностью горизонтального перемещения по направляющей, концы которой присоединены к ходовым элементам в виде ползунов, размещенных на двух расположенных напротив друг друга и параллельных вертикальных направляющих, закрепленных на боковых стойках каркаса.
6. Устройство по п. 1, отличающееся тем, что механизм реверсного прямолинейного перемещения секций выдвигаемых подхватывающих элементов выполнен в виде шагового электродвигателя с закрепленным на его валу зубчатым колесом, находящимся в зацеплении с зубчатой рейкой, образованной на тыльной стороне одного из подхватывающих элементов.
7. Устройство по п. 1, отличающееся тем, что длина прорези составляет от 0,8 до 0,97 максимального размера предмета в направлении, совпадающем с направлением выкатывания предмета с полки по подхватывающим элементам, а ширина прорези составляет 2-5 ширины подхватывающих элементов.
8. Устройство по п. 1, отличающееся тем, что блок управления содержит контроллер, модем для связи с процессинговым центром, блок считывания заказа с видеокамерой, блок формирования сигналов управления на запуск и останов приводов, датчики контроля, связанные с возможностью передачи информации и управления с приводами вертикального и горизонтального перемещения манипулятора, приводами секций подхватывающих элементов и приводом поворота каретки.
9. Устройство по п. 1, отличающееся тем, что предметы включают, но не исчерпываются бутылками с жидкостью, банками с жидкостью, контейнерами с жидкостью, где жидкость представляет собой напитки.
| Способ определения фильтрационных параметров пласта и скважин | 1981 |
|
SU991037A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 4591070 A, 27.05.1986. | |||

