Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству и способу рулевого управления для рабочей машины. В частности, но не исключительно, оно относится к устройству и способу рулевого управления для транспортных средств с задней разгрузкой или гусеничных транспортных средств с гидроприводом с разомкнутым контуром.
Уровень техники
Транспортные средства с задней разгрузкой или гусеничные транспортные средства, например гидравлические мини-экскаваторы (ГМЭ), обычно имеют гидропривод с разомкнутым контуром для приведения в движение и рулевого управления транспортным средством. Например, система с разомкнутым контуром может иметь жидкостной резервуар для гидравлического масла, из которого насос может откачивать объем жидкости. Насос оказывает давление на жидкость и направляет ее по меньшей мере в один из двух двигателей (по одному для каждой гусеницы), который соединен с гусеницей, так что вращение двигателя поворачивает гусеницу, двигая таким образом транспортное средство. После прохождения жидкости через двигатель жидкость возвращается в резервуар. Для сравнения в системе с замкнутым контуром обратный поток из двигателя вернулся бы в насос вместо резервуара. Системы с замкнутым контуром имеют тенденцию к обеспечению превосходного управления транспортным средством, но обычно требуют более сложных насосов, двигателей и управляющего программного обеспечения, что приводит к более высоким уровням сложности и затрат.
В устройстве с замкнутым контуром обратный поток может течь не быстрее, чем может принять насос. Например, на наклонной местности транспортное средство имеет тенденцию к качению вниз, при этом скорее гусеница приводит в движение двигатель, а не двигатель приводит в движение гусеницу. Однако двигатель не может вытеснять больше жидкости, чем может принять насос, следовательно, предотвращается увеличение числа оборотов двигателя, и оператор сохраняет контроль над скоростью транспортного средства. В системе с разомкнутым контуром без каких-либо дополнительно установленных органов управления двигатель может свободно сбрасывать жидкость в бак, что приводит к неуправляемому движению транспортного средства, например к выходу из-под контроля машины. Для предотвращения этой ситуации в обратном трубопроводе двигателя могут быть установлены запорные клапаны с нейтральным положением. Поскольку двигатель двусторонний, запорный клапан с нейтральным положением устанавливается в подающем/обратном трубопроводах к каждому двигателю.
Рулевое управление транспортными средствами с рулевым устройством с разомкнутым контуром достигается установкой двух двигателей с различными количествами жидкости или противоположными потоками, что приводит к тому, что гусеницы имеют различные скорости и/или направления. Одна проблема, связанная с системами с разомкнутым контуром, состоит в повторном переключении запорных клапанов с нейтральным положением в ответ на переменные потоки и давления, создаваемые во время процесса рулевого управления. Управление оператором может быть не всегда плавным, и на систему действуют меняющиеся вращающие моменты и требования к питанию во время рулевого маневра. Это вызывает многократное открытие и закрытие клапана с нейтральным положением, что делает рулевой маневр прерывистым и неуправляемым. Это может привести к проблемам с современными машинами, где для сокращения времени передвижения между объектами требуются высокие скорости передвижения. Чтобы избежать этих проблем, оператору может понадобиться замедлить транспортное средство или выполнить полную остановку перед выполнением поворота. Для повышения плавности во время поворота машина может быть оснащена крестовыми предохранительными клапанами между впускным и выпускным отверстиями двигателя, поскольку это обеспечивает непрерывное вращение двигателя с тормозом по мере движения жидкости через предохранительный клапан во время поворота и, следовательно, смягчение поворота до некоторой степени. Поскольку установки диапазона предохранительного клапана ограничены из-за системных установок предохранительного клапана, крестовой предохранительный клапан обеспечивает только частичное устранение некоторых проблем.
Следующее раскрытие направлено на преодоление некоторых из вышеуказанных недостатков.
Раскрытие изобретения
В первом варианте выполнения транспортное средство имеет систему гидропривода с разомкнутым контуром. Система гидропривода с разомкнутым контуром имеет первый и второй гидравлические двигатели с переменным рабочим объемом цилиндра для управления землеройными приспособлениями с противоположных сторон транспортного средства и средство управления для рулевого управления транспортным средством изменением рабочего объема одного из первого и второго двигателей.
Второй вариант выполнения изобретения раскрывает способ поворота транспортного средства, имеющего систему гидропривода с разомкнутым контуром, где система гидропривода с разомкнутым контуром имеет первый и второй гидравлические двигатели с переменным рабочим объемом цилиндра для управления землеройными приспособлениями с противоположных сторон транспортного средства. Способ включает выбор желаемого направления транспортного средства и изменение рабочего объема по меньшей мере одного из первого и второго двигателей в ответ на выбор желаемого направления транспортного средства и, таким образом, поворот указанного транспортного средства.
Другие признаки и аспекты настоящего раскрытия будут ясны из следующего описания.
Краткое описание чертежей
Настоящее изобретение поясняется чертежами, на которых представлено следующее:
фиг.1 - схема транспортного средства с системой рулевого управления с разомкнутым контуром согласно настоящему изобретению;
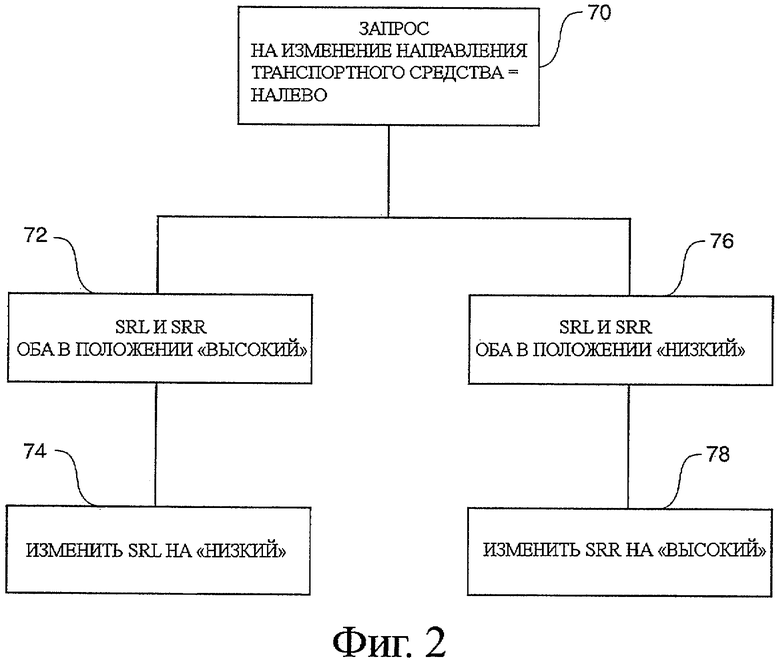
фиг.2 - блок-схема примера способа управления транспортным средством по фиг.1.
Осуществление изобретения
На фиг.1 показана схема для транспортного средства 10 с устройством рулевого управления, в котором достигается создание различных скоростей между противоположными землеройными приспособлениями, какие обычно можно видеть на машинах с задней разгрузкой или гусеничных транспортных средствах. Примерами таких машин могут служить гусеничные гидравлические экскаваторы или погрузчики с задней разгрузкой, или гусеничные, или оснащенные неуправляемыми колесами. Примером выполнения транспортного средства 10, показанного на фиг.1, может быть гидравлический мини-экскаватор с гусеницами, но применение настоящего раскрытия никоим образом не ограничивается гидравлическим мини-экскаватором с гусеницами.
Транспортное средство 10 содержит левую гусеницу 14 и правую гусеницу 114 для управления противоположными сторонами транспортного средства 10. Обе гусеницы соединены с гидравлической системой 30 через устройства вала и коробки передач 20 и 120 для приведения в движение и рулевого управления транспортным средством 10.
Гидравлическая система 30 может иметь различную конструкцию, но может характеризоваться как система разомкнутого контура, как будет описано ниже. Гидравлическая система 30 может быть в общем описана как имеющая первую цепь 31 для ведущей гусеницы 14, вторую цепь 33 для ведущей гусеницы 114 и одну или более дополнительных цепей для других гидравлических систем, присутствующих на транспортном средстве 10. Гусеницы 14 и 114 приводятся в движение независимыми, но, в основном, подобными цепями, и здесь будет подробно описана только одна из них, т.к. предполагается, что вторая цепь работает, в основном, таким же образом. Компоненты, задействованные в приведении в движение гусениц 14 и 114, с подобными номерами имеют подобные функции. Хотя цепи для приведения в движение гусениц до некоторой степени раздельны, они могут совместно использовать компоненты, где удобно, например питательный бачок 32 и устройство подачи жидкости 34.
Транспортное средство 10 имеет один или более питательных бачков 32, которые могут быть соединены между собой, для хранения гидравлической жидкости, например гидравлического масла. Устройство подачи жидкости, например насос 34, откачивает жидкость из бачка 32. Устройство подачи жидкости может быть одним управляемым двигателем насосом с переменным или фиксированным объемом для подачи жидкости во все системы на транспортном средстве 10, например трансмиссию, рулевое управление, рабочие рычаги и орудия, или оно может быть комбинацией насосов с более специализированными устройствами подачи. Для простоты устройство подачи жидкости будет описано как насос 34 фиксированного объема, выход жидкости которого зависит от скорости вращения и связанных с ней потерь. Насос 34 подает жидкость в гидрораспределитель 36, который может быть любого подходящего типа. Показанный гидрораспределитель 36 - это клапан, который обычно находится в таком положении, что жидкость не течет из насоса 34 по направлению к двигателю 52, и жидкость не течет из двигателя 52 в бачок 32. Гидрораспределитель 36 может быть пропорциональным клапаном, имеющим бесконечное число положений для управления направлением и объемом жидкости, протекающей через гидрораспределитель 36. Гидрораспределитель 36 может эксплуатироваться оператором через подходящее средство 38 ввода. Средство 38 ввода может быть механическим устройством, например рукояткой и/или электрическим/электронным устройством, например пропорциональным роликовым выключателем. Из гидрораспределителя 36 жидкость под давлением может течь в трубопровод 40 или 42, в зависимости от желаемого направления транспортного средства по выбору оператора. В этом примере жидкость под давлением из насоса 34 проходит через трубопровод 40 по направлению к контрольному клапану 44. Контрольный клапан 44 может быть двухходовым, трехпозиционным клапаном с нейтральным положением, подпружиненным в нейтральном положении, как показано, и может управляться гидролиниями 46 и 48 управления. Когда контрольный клапан 44 это допускает, жидкость под давлением может перемещаться через трубопровод 50 по направлению к двигателю 52. Двигатель 52 - это аксиально-поршневой приводной двигатель с переменным рабочим объемом, который может в принципе иметь бесконечное число доступных углов наклонной шайбы. В одном варианте выполнения возможен выбор только дискретного числа этих положений. Например, в одном исполнении двигатель может быть классифицирован как двухскоростной двигатель, поскольку могут быть выбраны только первый и второй углы наклонной шайбы. Из двигателя 52 жидкость возвращается через трубопровод 56, контрольный клапан 44, трубопровод 40, гидрораспределитель 36 и трубопровод 58 в бачок 32.
Положение угла наклонной шайбы двигателя 52 в этом примере управляется устройством 54, которое включает гидравлический клапан 60 и селективный клапан 62. Если предпочтительно, может быть выбрано другое подходящее устройство или могут быть установлены дополнительные ограничители или отверстия для улучшения характеристик потока, например для смягчения воздействия изменения во время смены положения угла наклонной шайбы двигателя 52. Клапан 60 относится к электрогидравлическому соленоидному типу и управляется логическим элементом 65, например блоком управления двигателем. Логический элемент 65 получает вводы от оператора через несколько средств ввода, расположенных в рабочей среде оператора. Средство 64 ввода, которое может быть, например, переключателем, управляет обоими клапанами 60 и 160 и посылает запрос логическому элементу 65 на запуск подобного действия в обоих двигателях 52 и 152. Основываясь на теоретическом принципе, заключающемся в том, что обе системы настроены идентично и отсутствует разница в установках и допусках, эксплуатация средства 64 ввода помещает оба двигателя 52 и 152 в идентичные положения, т.е. или они оба находятся в своих первых положениях угла наклонной шайбы, или они оба находятся в своих вторых положениях угла наклонной шайбы. Для двигателя 52 это достигается переводом клапана 60 в такое положение, что трубопровод с наибольшим давлением, т.е. один из трубопроводов 50 и 56, подает масло под давлением через селективный клапан 62 на контроллер 66 угла наклонной шайбы на двигателе 52. Двигатель может быть также подпружинен так, что двигатель находится в положении по умолчанию, если только он не получает сигнал от логического элемента 65. Функции средств 68 и 168 ввода, которые в этом примере могут быть переключателями, очень похожи на функции средства 64 ввода, за исключением того, что каждое из средств 68 и 168 ввода не управляет обоими двигателями 52 и 152. Средство 64 ввода управляет обоими двигателями 52 и 152, средство 68 ввода управляет двигателем 52, но не двигателем 152, и средство 168 ввода управляет двигателем 152, но не двигателем 52. В одном варианте выполнения средства 68 и 168 ввода являются переключателями с самовозвратом и возвращаются в положение по умолчанию, когда оператор больше не задействует их, в то время как средство 64 ввода остается в положении по выбору оператора.
Способ рулевого управления транспортным средством 10 показан на фиг.2. Следует учесть, что блок-схема не является исчерпывающей, и в нее может быть добавлено больше этапов и процедур или определенные этапы могут быть размещены в другом порядке. Ячейка 70 представляет процесс получения запроса на изменение направления транспортного средства по выбору оператора или другого устройства, например, по меньшей мере частично автоматизированной системы управления. В этом примере выполнения запрос на изменение направления соответствует запросу на поворот налево. Запрос на изменение может быть получен логическим элементом 65, который определяет текущие скоростные диапазоны обоих двигателей 52 и 152. При этом скоростной диапазон левого двигателя 52 обозначен SRL, а скоростной диапазон правого двигателя обозначен SRR. «ВЫСОКИЙ» означает, что двигатель имеет положение угла наклонной шайбы, соответствующее высокому скоростному диапазону транспортного средства, в то время как «НИЗКИЙ», следовательно, соответствует низкому скоростному диапазону транспортного средства. Логический элемент 65 может определять SRL и SRR, например, измерением или распознаванием электрических или электронных сигналов распознавания фактического физического положения компонента двигателей 52 и 152. Для выполнения запроса на левый поворот левая гусеница 14 должна работать медленнее, чем правая гусеница 114, следовательно, двигатель 52 должен работать медленнее, чем двигатель 152. Если SRL и SRR оба находятся в положении высокой скорости, как показано в ячейке 72, процесс переходит к ячейке 74, и SRL меняется на «НИЗКИЙ». Это приводит к тому, что двигатель 52 и соответствующая гусеница 14 замедляются, и транспортное средство 10 поворачивает налево. Если SRL и SRR оба находятся в положении «НИЗКИЙ», как показано в ячейке 76, выполняется процесс ячейки 78, и SRR меняется на «ВЫСОКИЙ». Это приводит к тому, что двигатель 152 и соответствующая гусеница 114 ускоряются и транспортное средство 10 поворачивает налево.
В одном варианте выполнения SRL и SRR не равны, пока средства 68 и 168 ввода включены. SRL и SRR могут быть уравнены или отключением одного средства ввода, которое включено, или включением обоих средств 68 и 168 ввода. При уравнивании SRL и SRR транспортное средство снова возобновляет перемещение по прямой линии, если не присутствуют другие факторы, которые могут влиять на направление транспортного средства.
Когда транспортное средство не двигается, любое нежелательное движение транспортного средства 10 предотвращается контрольными клапанами 44 и 144, блокирующими обратные трубопроводы от двигателей 52 и 152 к резервуару, удерживая таким образом двигатели 52 и 152 и соответствующие гусеницы 14 и 114 в фиксированном положении, поскольку двигатели не могут сбрасывать жидкость.
Во время эксплуатации оператор приводит в действие оба гидрораспределителя 36 и 136 в равной степени для запуска движения транспортного средства 10 по прямой линии. Для примера исполнения, как показано на Фиг.1, органами управления для гидрораспределителей 36 и 136 могут быть используемые вручную и установленные рядом рукоятки, которые можно тянуть или толкать. Поскольку функция обеих цепей для гусениц 14 и 114 снова одинакова, подробно будет описана только одна из них.
Чтобы преодолеть трение, связанное с движением транспортного средства, давление в двигателе 52 должно быть увеличено. Повышение давления распознается контрольным клапаном 44 через гидролинию 46 управления. Как только давление достигает определенного уровня, клапан 44 переводится в правое положение, следовательно, вовлекая левый участок клапана 44 в цепь. Это открывает соединение между обратными трубопроводами 50 и 42 от двигателя к резервуару после того, как транспортное средство начинает двигаться.
Контрольный клапан 44 имеет функцию предотвращения неуправляемого выхода из-под контроля транспортного средства 10 во время движения под уклон. На наклонной местности транспортное средство 10 обычно перемещается с большей скоростью, чем выбрано оператором. Гусеница 14 пытается увеличить скорость двигателя 52, что приводит к падению давления в трубопроводе 56 и, следовательно, в гидролинии 46 управления. Это позволяет контрольному клапану 44 перейти обратно в нейтральное положение и, следовательно, блокируется соединение между обратными трубопроводами 50 и 42. Это, в свою очередь, предотвращает вращение двигателя 52 и, следовательно, тормозит транспортное средство. Затем давление в трубопроводах 40 и 56 растет, что переводит контрольный клапан 44 снова в правое положение, что приводит к тому, что транспортное средство 10 снова начинает управляемое движение по прямой. Обычно этот цикл бывает коротким, так что машина, скорее всего, не дойдет до полной остановки, хотя поведение машины может быть неровным.
В любое время во время эксплуатации транспортного средства 10 оператор может задействовать средство 64 ввода. Средство 64 ввода помещает оба двигателя 52 и 152 одновременно в одинаковые положения угла наклонной шайбы, как описано выше. Когда выбирается минимальный угол наклонной шайбы, транспортное средство 10 находится в режиме высокой скорости и низкого вращающего момента, подходящем для таких операций, как перемещение на дальнее расстояние. Когда выбирается максимальный угол наклонной шайбы, машина находится в режиме низкой скорости и высокого вращающего момента, который более подходит для рабочих операций или точного маневрирования.
Следовательно, комбинация указанных выше органов управления дает оператору возможность выбирать скоростной диапазон с помощью средства 64 ввода и выбирать скорость в пределах выбранного скоростного диапазона путем эксплуатации гидрораспределителей 36 и 136. Этот тип системы обычно эксплуатируется при фиксированной скорости двигателя, но если принимается режим переменной скорости двигателя, это влияет на выход жидкости насоса 34 и, следовательно, на скорость транспортного средства.
Изменение направления транспортного средства 10 может быть достигнуто выбором для гидрораспределителя 36 положения, отличного от положения для гидрораспределителя 136, и наоборот. При выборе различных положений контрольных клапанов в каждом из двигателей 52 и 152 обеспечивается различная скорость потока, и одна из гусениц 14 и 114 работает быстрее, чем другая, следовательно, вызывая поворот транспортного средства 10. Однако изменение скорости потока через один из гидрораспределителей 36 и 136 для обеспечения такого поворота приводит к колебаниям давления ниже по потоку, которые могут повлиять на поведение контрольных клапанов 44 и 144. Контрольные клапаны 44 и 144 чувствительны к давлениям в трубопроводах, с которыми они соединены, как описано выше, и могут, следовательно, повторно открываться и закрываться, делая движение поворота прерывистым. Особенно при высоких скоростях это может привести к опасным ситуациям, где прерывистое движение может быть усилено, поскольку внезапный рывок может бросить оператора вперед или назад, что, в свою очередь, может вызвать неуправляемое движение оператора гидрораспределителей 36 и 136. Следовательно, оператор может значительно снизить скорость транспортного средства или привести его в полную остановку перед выполнением поворота с помощью гидрораспределителей 36 и 136.
Вместо управления гидрораспределителями 36 и 136 оператор может использовать одно из средств 68 и 168 ввода. В предпочтительном варианте выполнения средство ввода может быть установлено на рукоятках, которые управляют гидрораспределителями 36 и 136, так что оператору не нужно убирать руки с рукояток. Если, например, оператор хочет выполнить поворот налево, левая гусеница 14 должна работать с более низкой скоростью, чем правая гусеница 114. Если оба двигателя 52 и 152 находятся в режиме высокой скорости, т.е. в положении минимального угла наклонной шайбы, задействование средства 68 ввода даст команду логическому элементу 65 поместить двигатель 52 в положение максимального угла наклонной шайбы, таким образом снизив скорость гусеницы 14. Если оба двигателя 52 и 152 находятся в режиме низкой скорости, т.е. в положении максимального угла наклонной шайбы, задействование средства 68 ввода даст команду логическому элементу 65 поместить двигатель 52 в положение минимального угла наклонной шайбы, таким образом повысив скорость гусеницы 114. Логический элемент 65 может быть, следовательно, запрограммирован так, чтобы иметь последовательный отклик транспортного средства 10 в ответ на включение одного из средств 68 и 168 ввода. Например, включение средства 68 ввода может, где возможно, всегда вызывать левый поворот, а включение средства 168 ввода может, где возможно, всегда вызывать правый поворот. Из вышеуказанного ясно, что может потребоваться выполнение логическим элементом 65 различных действий для эксплуатации двигателя 52 в определенных условиях и двигателя 152 в других условиях. В условиях должно учитываться состояние двигателей 52 и 152 в момент получения запроса рулевого управления, но они могут также зависеть от типа транспортного средства. Например, гидравлические экскаваторы обычно оснащены операторской платформой, которая с возможностью вращения установлена на гусеничной ходовой тележке. Следовательно, платформа может поворачиваться так, что оператор поворачивается или к передней, или к задней части машины, как определено тележкой. Это, конечно, подразумевает и поворот оператора влево или вправо. Чтобы сделать органы управления более эргономичными для оператора, логический элемент 65 может быть запрограммирован и оснащен так, что он может определять ориентацию оператора или кабины и соответственно адаптировать отклик на запрос рулевого управления.
Рулевое управление транспортным средством 10 путем задействования одного из средств 68 и 168 ввода приводит к минимальному нарушению положения контрольных клапанов 44 и 144. Конечно, контрольные клапаны 44 и 144 могут на мгновение испытать воздействие, но в меньшей степени, чем это происходит, когда осуществляется рулевое управление с эксплуатацией гидрораспределителей 36 и 136. Конечно, контрольные клапаны 44 и 144 могут по-прежнему влиять на управляемость транспортного средства, если какие-либо из маневров выполняются на наклонной местности, как описано выше.
Рулевое управление транспортным средством 10 за счет изменения положения угла наклонной шайбы одного из двигателей 52 и 152 до заданного положения приводит к поворотному циклу, имеющему фиксированный радиус, поскольку поворот не управляется пропорционально. Это может быть предпочтительно для неопытного оператора, который хочет, например, слегка скорректировать перемещение по прямой линии, поскольку длина поворота диктуется длительностью включения одного из средств 68 и 168 ввода, а не длительностью и степенью смещения средств 38 и 138 ввода, выполненных в виде рычагов управления.
Хотя здесь описаны предпочтительные исполнения настоящего изобретения, могут быть включены улучшения и модификации без отклонения от объема следующей формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ СИСТЕМЫ ПРИВОДА/РУЛЕВОГО УПРАВЛЕНИЯ ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2247048C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ СИСТЕМЫ ПРИВОДА/РУЛЕВОГО УПРАВЛЕНИЯ ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2247049C2 |
| УКЛАДЧИК ДОРОЖНО-СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ | 1993 |
|
RU2076167C1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО С ПЕРЕКЛЮЧАЕМОЙ СИСТЕМОЙ УПРАВЛЕНИЯ ПЕРЕДВИЖЕНИЕМ | 2020 |
|
RU2765167C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВЕДЕНИЕМ В ДВИЖЕНИЕ ГУСЕНИЧНОГО КАНАВОКОПАТЕЛЯ | 2008 |
|
RU2572850C2 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ГРУНТОВОЙ ПОДУШКИ ТРУБОПРОВОДА | 1989 |
|
RU2044119C1 |
| ГИДРОСИСТЕМА | 1996 |
|
RU2103565C1 |
| СИСТЕМА И СПОСОБ ОБМЕНА ДАННЫМИ ДЛЯ АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2730117C2 |
Изобретение относится к области транспортного машиностроения, в частности к транспортным средствам и способам его управления. Транспортное средство имеет систему гидропривода с разомкнутым контуром. Система гидропривода содержит первый и второй гидравлические двигатели с переменным рабочим объемом для приведения в движение землеройных приспособлений и средство управления для изменения рабочего объема одного из указанных первого и второго двигателей. Способ поворота транспортного средства, имеющего систему гидропривода с разомкнутым контуром, заключается в том, что выбирают направление движения транспортного средства и изменяют рабочий объем одного из указанных двигателей, затем выполняют поворот транспортного средства. Достигается улучшение управления транспортного средства. 2 н. и 17 з.п. ф-лы, 2 ил.
1. Транспортное средство, имеющее систему гидропривода с разомкнутым контуром, в котором указанная система гидропривода с разомкнутым контуром содержит:
первый гидравлический двигатель с переменным рабочим объемом для приведения в движение землеройных приспособлений на первой стороне транспортного средства,
второй гидравлический двигатель с переменным рабочим объемом для приведения в движение землеройных приспособлений на второй стороне транспортного средства,
средство управления для рулевого управления транспортным средством с помощью изменения рабочего объема одного из указанных первого и второго двигателей.
2. Транспортное средство по п.1, в котором первый и второй двигатели имеют дискретное число выбираемых положений рабочего объема.
3. Транспортное средство по п.1, в котором средство управления содержит первое и второе средства ввода для управления первым и вторым двигателями соответственно.
4. Транспортное средство по п.3, которое содержит третье средство ввода для управления скоростным диапазоном транспортного средства с помощью одновременного выбора одинаковых рабочих объемов первого и второго двигателей.
5. Транспортное средство по п.4, которое содержит логический элемент для адаптирования требуемого изменения первого и второго двигателей в ответ на включение первого и второго средств ввода относительно рабочего объема указанных двигателей, как выбрано третьим средством ввода.
6. Транспортное средство по любому из пп.1-5, в котором первый и второй двигатели образуют часть первой и второй приводной цепи соответственно, причем первая и вторая приводные цепи содержат, по меньшей мере, одно устройство подачи жидкости с переменным объемом для снабжения, по меньшей мере, одной из указанных первой и второй приводных цепей жидкостью под давлением.
7. Транспортное средство по п.6, в котором указанные первая и вторая приводные цепи включают первый контрольный клапан, расположенный между, по меньшей мере, одним устройством подачи жидкости и первым двигателем, и второй контрольный клапан, причем первый и второй контрольные клапаны предназначены для предотвращения состояния выхода из-под контроля указанного транспортного средства.
8. Транспортное средство по п.7, в котором, по меньшей мере, одно устройство подачи жидкости выполнено в виде насосного устройства для первой и второй приводных цепей, при этом количество жидкости, подаваемой в первую приводную цепь, регулируется первым пропорциональным контрольным клапаном, а количество жидкости, подаваемой во вторую приводную цепь, регулируется вторым пропорциональным контрольным клапаном.
9. Транспортное средство по п.8, которое содержит четвертое и пятое средства ввода для включения первого и второго контрольных клапанов соответственно.
10. Способ поворота транспортного средства, имеющего систему гидропривода с разомкнутым контуром, причем система гидропривода с разомкнутым контуром содержит первый гидравлический двигатель с переменным рабочим объемом для приведения в движение землеройных приспособлений на первой стороне транспортного средства, и второй гидравлический двигатель с переменным рабочим объемом для приведения в движение землеройных приспособлений на второй стороне транспортного средства, в котором:
выбирают направление транспортного средства, и изменяют рабочий объем, по меньшей мере, одного из указанных первого и второго двигателей в ответ на выбор направления транспортного средства и следовательно выполняют поворот указанного транспортного средства.
11. Способ по п.10, в котором открывают контрольный клапан в обратном трубопроводе от, по меньшей мере, одного из первого и второго двигателей, причем контрольный клапан нормально закрыт для предотвращения состояния выхода из-под контроля указанного транспортного средства.
12. Способ по п.10, в котором выбирают скоростной диапазон транспортного средства в основном одновременным помещением обоих указанных первого и второго двигателей в одинаковые рабочие объемы.
13. Способ по п.12, в котором при изменении рабочего объема, по меньшей мере, одного из первого и второго двигателей в ответ на выбор желаемого направления транспортного средства отменяют выбор, сделанный на этапе выбора скоростного диапазона транспортного средства посредством перевода первого и второго двигателей в одинаковые рабочие объемы.
14. Способ по п.10, в котором транспортное средство имеет устройство подачи жидкости для подачи первого переменного потока жидкости на второй двигатель, причем управляют скоростью и направлением транспортного средства с помощью манипуляции, по меньшей мере, одного из первого и второго потоков жидкости.
15. Способ по любому из пп.12-14, в котором:
получают запрос на изменение направления транспортного средства, определяют, что текущее положение первого двигателя, относительно выбранного скоростного диапазона, находится в положении рабочего объема, соответствующем низкому скоростному диапазону транспортного средства,
изменяют текущее положение первого двигателя на положение рабочего объема, соответствующее высокому скоростному диапазону транспортного средства, в ответ на запрашиваемое изменение направления транспортного средства.
16. Способ по любому из пп.12-14, в котором:
получают запрос на изменение направления транспортного средства,
определяют, что текущее положение первого двигателя, относительно выбранного скоростного диапазона, находится в положении рабочего объема, соответствующем высокому скоростному диапазону транспортного средства,
изменяют указанное текущее положение первого двигателя на положение рабочего объема, соответствующее низкому скоростному диапазону транспортного средства, в ответ на запрашиваемое изменение направления транспортного средства.
17. Способ по любому из пп.10-14, в котором подают на первый и второй двигатели жидкости с различными скоростями потока и одновременно переводят первый и второй двигатели в различные рабочие объемы.
18. Способ по любому из пп.10-14, в котором:
получают первый запрос на изменение направления транспортного средства,
определяют, что первый и второй гидравлические двигатели оба находятся в одном скоростном диапазоне, который выбран, по меньшей мере, из первого и второго скоростных диапазонов;
один из первого и второго гидравлических двигателей переводят из первого скоростного диапазона во второй скоростной диапазон, в ответ на указанный первый запрос на изменение направления транспортного средства;
получают второй запрос на изменение направления транспортного средства,
один из первого и второго гидравлических двигателей переводят из второго скоростного диапазона в первый скоростной диапазон, в ответ на второй запрос на изменение направления транспортного средства.
19. Способ по любому из пп.10-14, в котором:
получают первый запрос на изменение направления транспортного средства;
определяют, что указанные первый и второй гидравлические двигатели оба находятся в одном скоростном диапазоне, который выбран, по меньшей мере, из первого и второго скоростных диапазонов;
один первый гидравлический двигатель переводят из первого скоростного диапазона во второй скоростной диапазон, в ответ на первый запрос на изменение направления транспортного средства;
получают второй запрос на изменение направления транспортного средства;
один второй гидравлический двигатель переводится из первого скоростного диапазона во второй скоростной диапазон, в ответ на второй запрос на изменение направления транспортного средства.
| US 5282516 А, 01.02.1994 | |||
| US 4457387 А, 03.07.1984 | |||
| Устройство для импульсной сварки | 1935 |
|
SU48921A1 |
| US 5529134 A, 26.06.1996 | |||
| Трансмиссия гусеничного транспортного средства | 1989 |
|
SU1636288A1 |

