Изобретение относится к приемнику транспортной системы по независимому пункту 1 формулы изобретения и к способу производственного монтажа транспортной системы по независимому пункту 9 формулы изобретения. Производственный монтаж определяется как сборка различных деталей и узлов эскалатора или движущегося тротуара.
Транспортными системами в рамках настоящего описания называются эскалаторы и движущиеся тротуары. Приемники транспортных систем в смысле изобретения используются при тактовом производственном монтаже серий транспортных систем на производственных линиях, как это описано в патентной заявке 05111810.7 того же заявителя. При этом каждая транспортная система или ее конструкция проходит несколько монтажных станций. Серии транспортных систем могут включать в себя несколько транспортных систем, обычно от трех до сорока. Конструкции транспортных систем, одновременно включенные в процесс производственного монтажа, могут быть одинаковой или разной длины, высоты и ширины. На каждой монтажной станции на одной фазе монтажа осуществляют один специфический этап монтажа, который может включать в себя, в свою очередь, отдельные операции. Эти фазы монтажа длятся на отдельных монтажных станциях преимущественно, по меньшей мере, одинаково долго, например около трех часов. Как только этапы монтажа на всех монтажных станциях закончены, следует фаза перевозки. На фазе перевозки увозят конструкции транспортных систем, производственный монтаж которых закончен, доставляют на соответственно следующую монтажную станцию следующие конструкции транспортных систем и подают «новую» конструкцию транспортной системы, производственный монтаж которой только начинается. Для рационального и тактового производства важно, чтобы перевозка всех включенных в процесс производственного монтажа конструкций транспортных систем протекала как можно более синхронно и длилась как можно короче, а именно даже тогда, когда отдельные транспортные системы отличаются по длине.
Такую короткую и синхронную фазу перевозки нельзя реализовать традиционными средствами. Из US 6808057 известно лишь устройство с установленной на грузовой платформе грузового автомобиля лестницей, наклон которой регулируется, а из US 4260318 - устройство для перевозки предварительно смонтированных эскалаторов к месту их установки. Оба устройства, даже с меньшими переделками, не подходят для описанной выше перевозки включенных в процесс производственного монтажа транспортных систем, поскольку к стабильности, жесткости, маневренности, точности и гибкости предъявляются повышенные требования.
Задачей изобретения являются рационализация процесса производственного монтажа конструкций транспортных систем и, в частности, создание приемника транспортной системы, с помощью которого транспортная система на фазе перевозки может быть подвезена к монтажной станции и отвезена от нее, и способа производственного монтажа транспортной системы.
Эта задача решается согласно изобретению в отношении приемника транспортной системы посредством признаков независимого пункта 1 и способа - посредством признаков независимого пункта 9 формулы изобретения.
Новый приемник транспортной системы должен быть выполнен, в частности, с возможностью быстрого и простого прицепления к конструкции транспортной системы и отцепления от нее, тем не менее, должно достигаться надежное сцепление. Поскольку одновременно необходимо грузить множество транспортных систем, предпочтительно использовать дополнительные запасные приемники транспортных систем, и потому отдельные приемники транспортных систем должны быть рентабельны и просты в изготовлении и обслуживании. Как уже указывалось, конструкции транспортных систем могут иметь разную ширину или длину, а это означает, что приемники транспортных систем должны быть выполнены с возможностью соответствующей подгонки.
Предпочтительные подробности и усовершенствования объектов изобретения охарактеризованы в зависимых пунктах формулы изобретения.
Приемник транспортных систем согласно изобретению содержит приводной блок и, по меньшей мере, один первый и один второй грузовые блоки. В качестве грузового блока может использоваться грузовая платформа на роликах или, при необходимости, на полозьях.
Приводным блоком может быть тягач, преимущественно с электроприводом. Такой тягач может иметь, например, две оси с возможностью прицепления посредством толкающей штанги или гибкого элемента, например цепи или троса, к конструкции транспортной системы, так что приводной блок находится в непосредственном соединении с конструкцией транспортной системы.
Вместо такого тягача может быть использовано также подобие вилочного приемника, стыкующегося со служащей в качестве грузового блока грузовой платформой на роликах большой грузоподъемности. Конструкцию транспортной системы грузят с помощью этой грузовой платформы и дополнительного грузового блока. В этом случае приводной блок посредством грузовой платформы находится в косвенном соединении с конструкцией транспортной системы.
Промежуточный модуль согласно изобретению представляет собой монтажный блок, содержащий приемник транспортной системы и погруженную на него конструкцию включенной в процесс производственного монтажа транспортной системы. При этом приемник служит для автономной перевозки конструкции транспортной системы и за счет этого для ее подвоза, например, к монтажным станциям и ее отвоза от них, а также в качестве опоры для конструкции транспортной системы на монтажных станциях, чтобы неподвижно удерживать и фиксировать ее или отставлять. Приемник транспортной системы и конструкция транспортной системы образуют, по меньшей мере, во время монтажа блок, называемый здесь промежуточным модулем.
Монтажной площадкой согласно изобретению может быть, например, сборочный цех, заводской цех, портальный цех, открытая площадка, надувной павильон, или крытый павильон, или навес. Монтажная площадка включает в себя определенное число монтажных станций, множество приемников и систему управления. Монтажные станции снабжают промежуточными модулями последовательно и обычно в заданном порядке и на каждой монтажной станции во время заданного монтажного периода осуществляют специфический для данной станции этап монтажа конструкции транспортной системы. По окончании этого этапа монтажа промежуточные модули во время периода перевозки перевозят на следующие монтажные станции. С помощью системы управления этапы монтажа и этапы перевозки всех включенных в процесс производственного монтажа промежуточных модулей выполняются одновременно и тактами. При этом система управления учитывает, что промежуточные модули или транспортная система выполнены по-разному. При этом этапы монтажа на отдельных монтажных станциях являются специфическими для каждой станции, однако могут управляться с возможностью согласования с соответствующим находящимся там промежуточным модулем. Таким образом, получают монтажную систему, в которой преимущества и свойства индивидуального производства комбинируются с преимуществами и свойствами серийного производства.
Другие подробности и преимущества изобретения поясняются ниже на примерах его осуществления и со ссылкой на чертежи, на которых изображают:
фиг.1: вид сбоку первого примера выполнения промежуточного модуля с приемником транспортной системы и конструкцией транспортной системы, причем приемник транспортной системы прицеплен к конструкции эскалатора, во время движения в первом направлении;
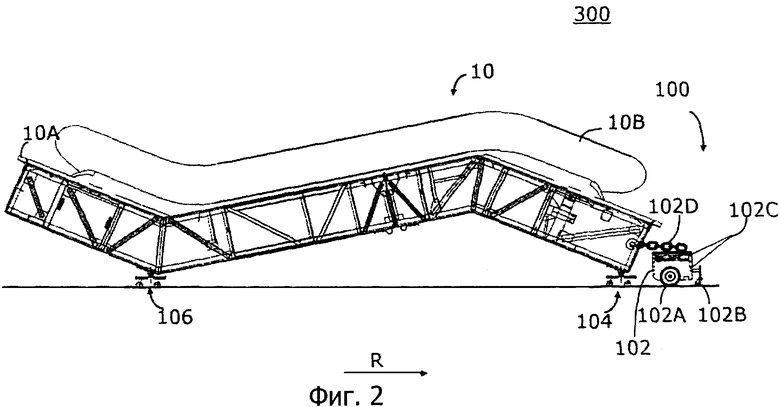
фиг.2; в том же виде, что и на фиг.1, промежуточный модуль из фиг.1 во время его движения во встречном направлении;
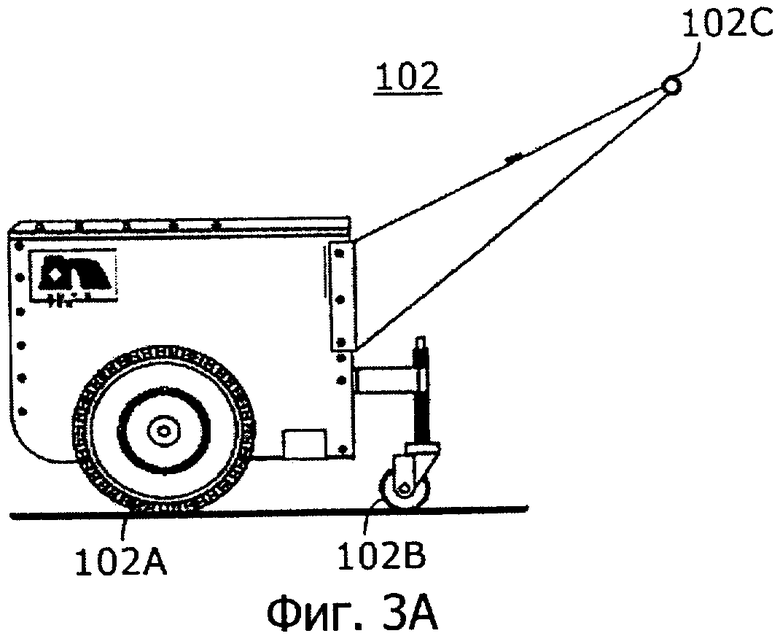
фиг.3А: вид сбоку приводного блока приемника транспортной системы из фиг.1;
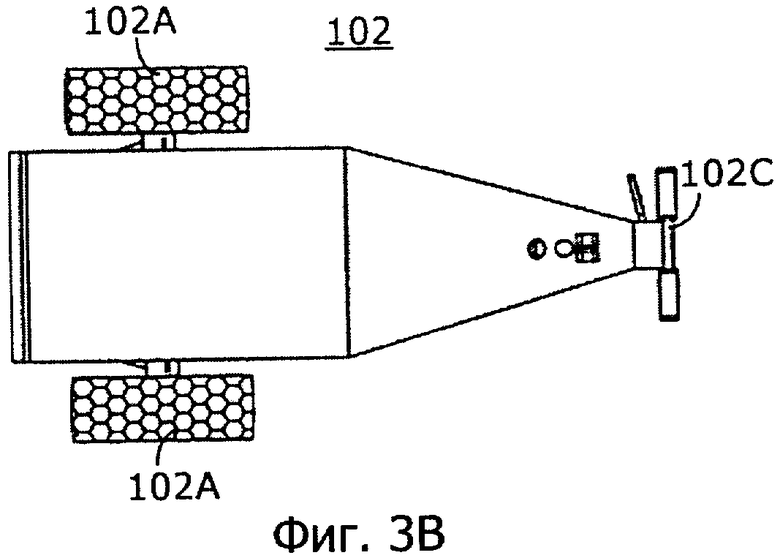
фиг.3В: вид сверху приводного блока из фиг.3А;
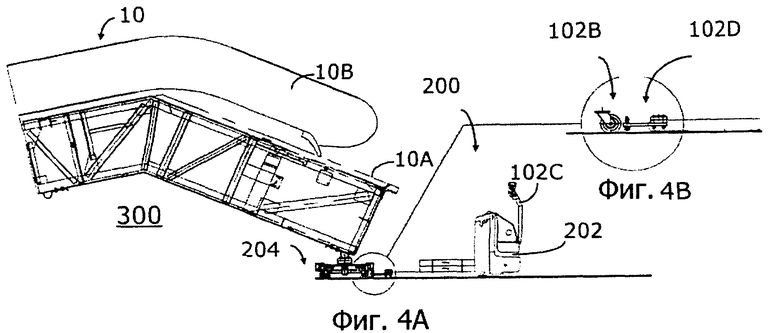
фиг.4А: вид сбоку второго примера выполнения приемника транспортной системы, из которого изображены только приводной блок и первый грузовой блок, с частью конструкции транспортной системы;
фиг.4В: в увеличенном виде обведенный кружком на фиг.4А фрагмент или деталь;
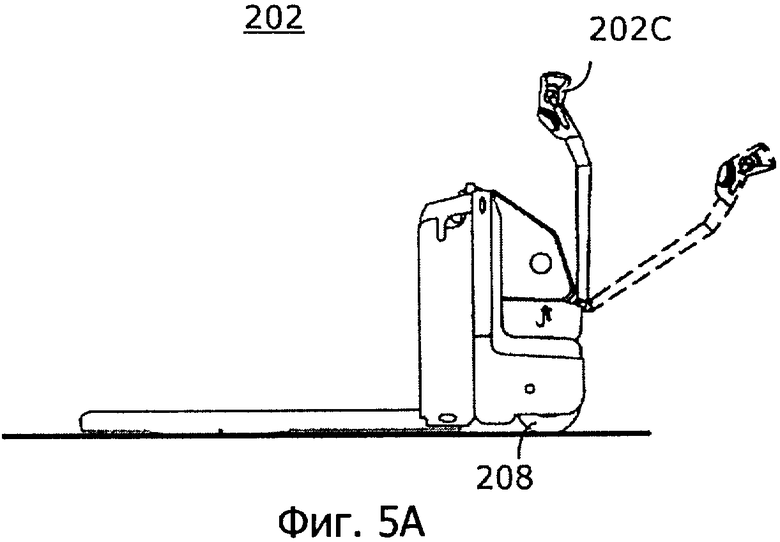
фиг.5А: вид сбоку приводного блока приемника транспортной системы из фиг.4;
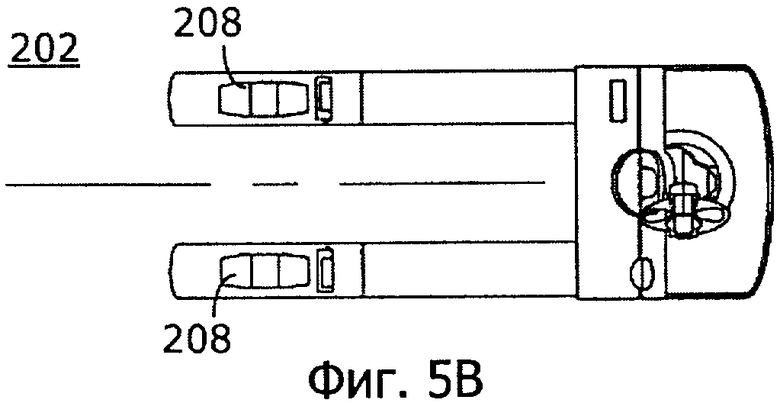
фиг.5В: вид сверху приводного блока из фиг.5А;
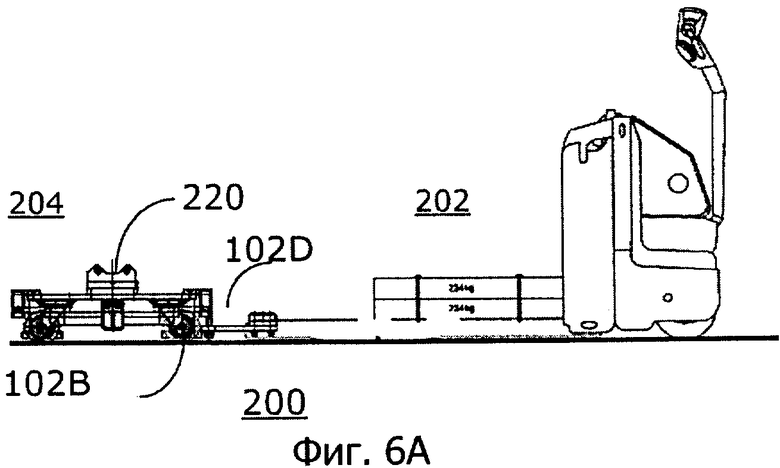
фиг.6А: вид сбоку приводного блока из фиг.5А, 5В с прицепленным первым грузовым блоком;
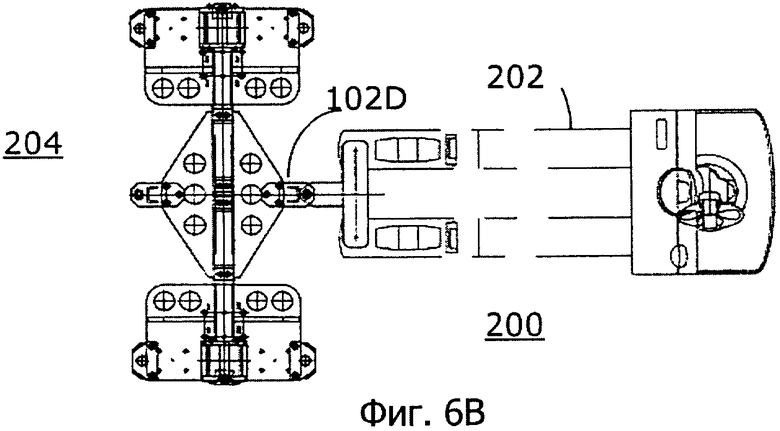
фиг.6В: вид сверху приводного блока из фиг.6А с грузовым блоком;
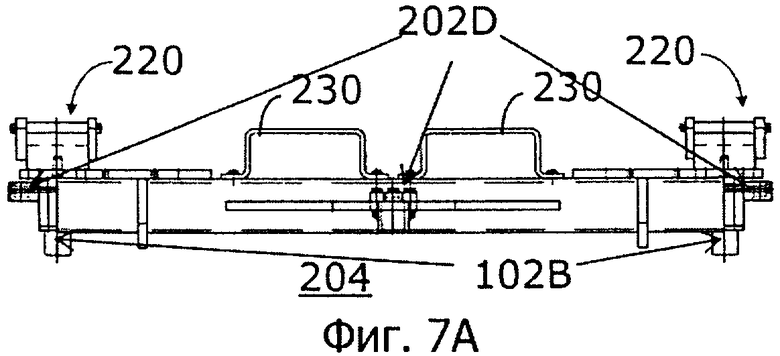
фиг.7А: вид спереди грузового блока из фиг.6А, 6В;
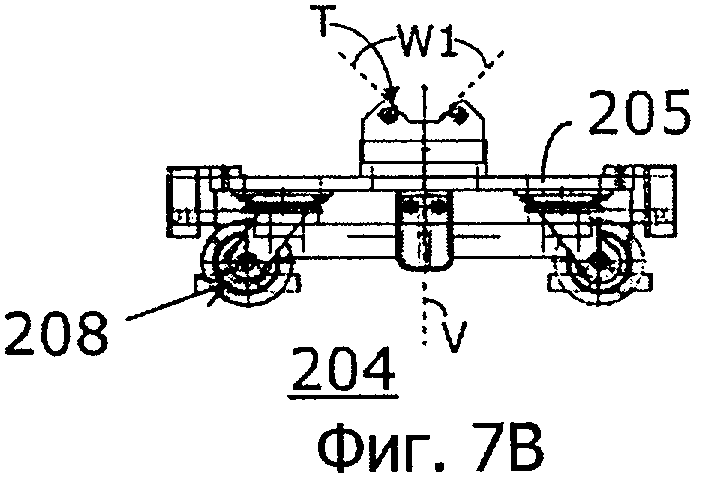
фиг.7В: вид сверху грузового блока из фиг.7А;
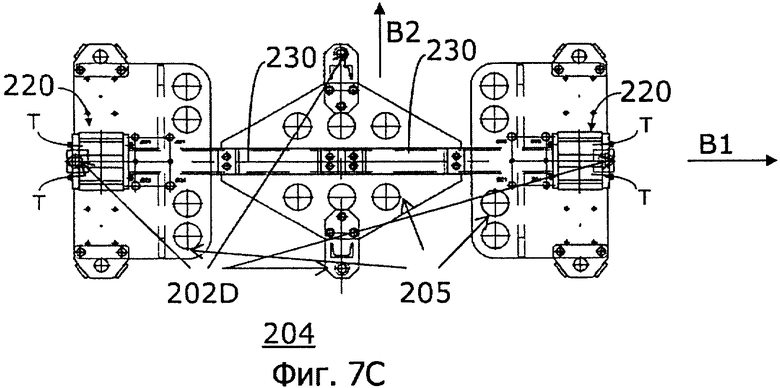
фиг.7С: вид сбоку грузового блока из фиг.7А, 7В;
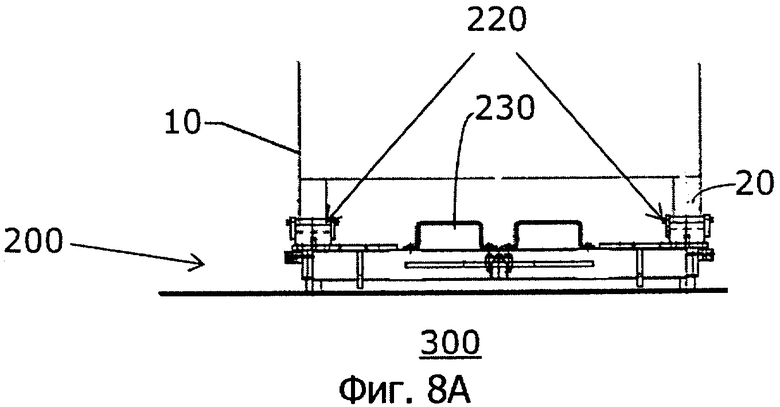
фиг.8А: промежуточный модуль, содержащий грузовой блок из фиг.7А-7С и конструкцию транспортной системы на виде сзади и спереди без приводного блока;
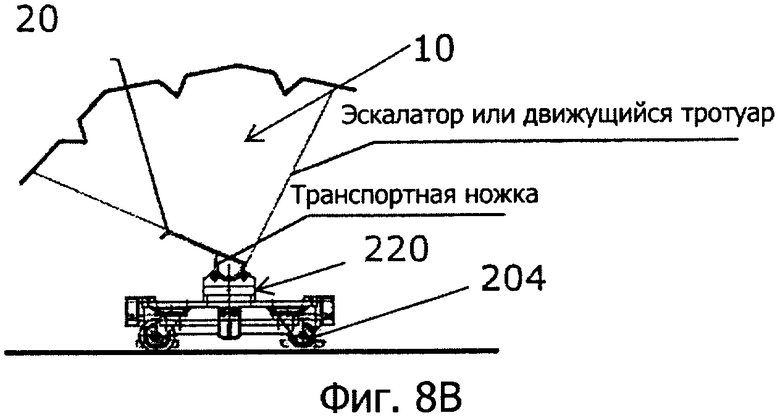
фиг.8В: грузовой блок из фиг.8А на виде сбоку, спереди и сзади на конструкции транспортной системы и без приводного блока;
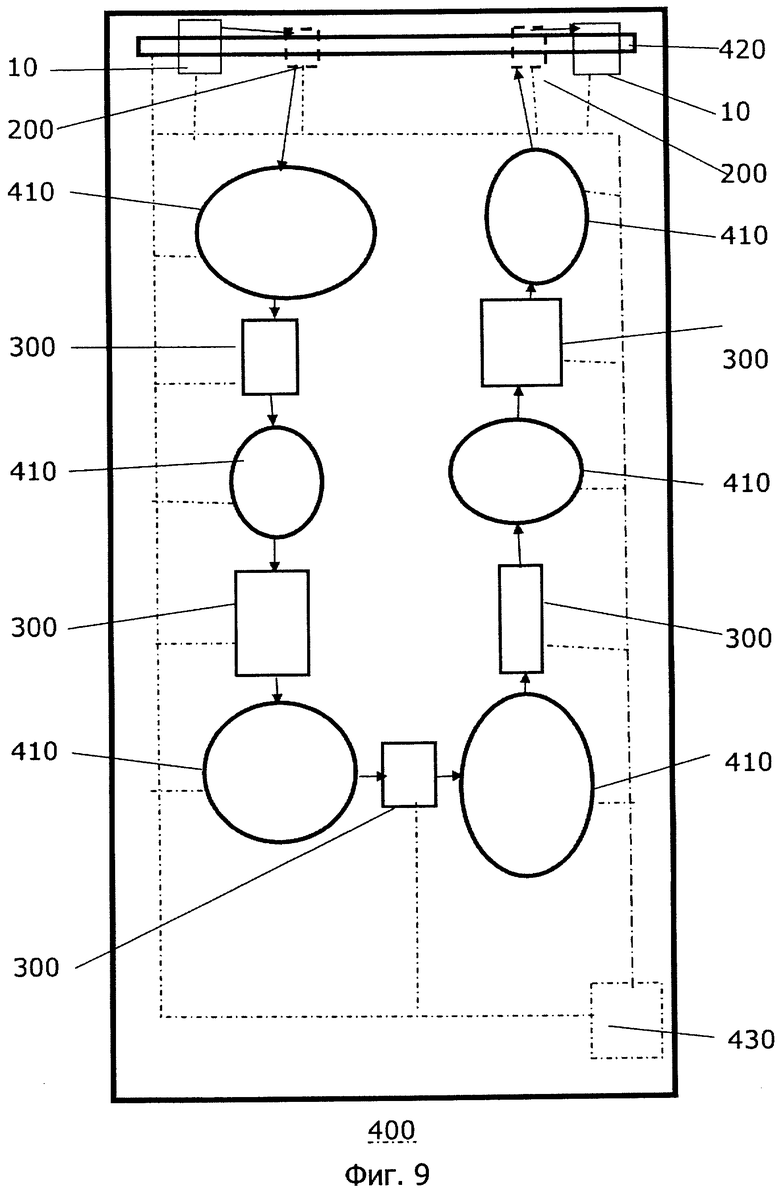
фиг.9: в сильно упрощенном виде монтажную станцию.
Детали одинакового действия обозначены одинаковыми ссылочными позициями не на всех фигурах. Такие обозначения, как «вверху», «внизу», «справа», «слева», относятся к изображению деталей на фигурах или направлению движения приемника транспортной системы.
На фиг.1 изображен промежуточный модуль 300 с приемником 100 транспортной системы, содержащим приводной блок 102, а также первый 104 и второй 106 грузовые блоки. Приемник 100 транспортной системы прицеплен к левому нижнему концу конструкции 10 транспортной системы, т.е. к конструкции 10А эскалатора с балюстрадой 10В, так что возможно перемещение влево по стрелке L.
Изображенный на фиг.3А, 3В в увеличенном виде приводной блок 102, который можно назвать также тяговым элементом или самоходным приводным элементом, представляет собой в данном примере тягач с неуправляемой роликовой парой 102А и управляемым роликом 102В. Далее приводной блок 102 содержит исполнительное звено 102С. На приводном блоке 102 закреплен стыковочный элемент 102D, посредством которого приводной блок 102 пристыкован или прицеплен непосредственно к перемещаемой конструкции 10 транспортной системы, например, посредством электромагнита.
Стыковочный элемент 102D представляет собой в данном примере гибкий элемент, нагружаемый только на растяжение и потому пригодный только для того, чтобы тянуть конструкцию 10 транспортной системы. Стыковочный элемент 102D может быть также жестким, т.е. может представлять собой толкающую или толкающе-тянущую штангу, так что конструкцию 10 транспортной системы можно также толкать или управлять ею.
Грузовые блоки 104, 106 могут состоять каждый из пары частичных грузовых блоков и могут быть выполнены одинаково или по-разному. Грузовые блоки 104, 106 содержат платформу 104А, 106А и по две оси, оснащенных роликовыми парами 104В, 106В. Вместо роликовых пар может быть предусмотрен один или несколько валиков или один или несколько полозьев.
На фиг.2 также изображены погрузчик 100 транспортной системы с приводным блоком 102 и грузовыми блоками 104, 106, а также конструкция 10 транспортной системы. Приводной блок 102 пристыкован или прицеплен к правому верхнему концу конструкции 10 транспортной системы, что позволяет тянуть конструкцию 10 транспортной системы вправо по стрелке R.
Фиг.4А-8В относятся ко второму примеру выполнения приемника транспортной системы. На фиг.4А изображен приемник 200 транспортной системы без второго приводного блока с частью конструкции 10 транспортной системы вместе с балюстрадой 10В и каркасом 10А.
Приемник 200 транспортной системы включает в себя приводной блок 202 в виде традиционного вилочного приемника или самоходного большегрузного вилочного приемника, более подробно изображенного на фиг.5А, 5В.
Далее приемник 200 транспортной системы включает в себя приводной блок 202 с первым пристыкованным грузовым блоком 204 и обычно, по меньшей мере, один второй грузовой блок (не показан). На фиг.6А, 6В приводной блок 202 изображен с пристыкованным грузовым блоком 204.
Подробности конструкции грузового блока 204 видны на фиг.7А-7С. Грузовой блок 204, представляющий в основном грузовую платформу, установлен с возможностью движения на четырех роликах большой грузоподъемности. Для соединения приводного блока 202 с грузовым блоком 204 предусмотрены стыковочные средства, в данном примере штырь или вставной палец на приводном блоке 202. Соответствующие посадочные элементы для штыря или серьги и/или проушины, скобы, кольца, рым-болты, цепные звенья или карабины находятся на грузовом блоке 204. Грузовой блок 204 имеет в данном примере несколько посадочных элементов для штыря, а именно четыре. Приводной блок 202 пристыковывают к грузовому блоку 204 благодаря тому, что его штырь или вставной палец входит альтернативно в один из четырех посадочных элементов для штыря. Благодаря этому можно тянуть или толкать грузовой блок 204, перемещая его, таким образом, в разных направлениях.
Грузовой блок 204 имеет посадочные элементы 220 для транспортных ножек. Посадочные элементы 220 выполнены в виде захватов или вилок. Посадочные элементы 220 служат для размещения соответствующих транспортных ножек 20 перемещаемой конструкции 10 транспортной системы и выполнены с возможностью регулирования также по высоте, глубине и ширине. Для первой фазы перевозки конструкцию 10 транспортной системы, обычно посредством подъемного механизма или мостового или портального крана, опускают на грузовой блок 204 таким образом, что его транспортные ножки 20 входят в посадочные элементы 220 (фиг.8А). Посадочные элементы 220 препятствуют вертикальному движению вниз и горизонтальному сдвигу или соскальзыванию конструкции 10 транспортной системы с грузового блока 204. Транспортная ножка 20 конструкции 10 транспортной системы охватывается посадочным элементом 220, поскольку выемка посадочного элемента 220 и транспортная ножка 20 приведены в соответствие между собой или выполнены, дополняя друг друга, в отношении формы и величины как продольном, так и в поперечном направлении. В данном примере вильчатый или когтеобразный посадочный элемент 220 препятствует возвратно-поступательному движению конструкции 10 транспортной системы относительно грузового блока 204. Также ширина посадочного элемента 220 согласована с транспортной ножкой 20 с небольшим зазором, что делает невозможным также боковое или поперечное движение конструкции 10 транспортной системы относительно грузового блока 204. Кроме того, боковые ограничительные листы препятствуют соскальзыванию или сдвигу транспортной ножки 20 в поперечном направлении.
Посадочные элементы 220 установлены попарно на грузовой платформе 205 приемника 204 транспортной системы, так что каждая пара посадочных элементов 220 может размещать одну левую и одну правую транспортные ножки 20 конструкции 10 транспортной системы, причем термины «слева» и «справа» относятся к направлению движения готовой транспортной системы (фиг.8А).
Поскольку не все перемещаемые конструкции 10 транспортных систем имеют одинаковую ширину, грузовой блок 204 следует подгонять по ширине. Для этой цели грузовая платформа 205 и посадочные элементы 220 для транспортных ножек выполнены с возможностью расположения на грузовой платформе 205 посадочных элементов 220 на разной ширине или с разными взаимными промежутками в зависимости от ширины размещаемой и перевозимой конструкции 10 транспортной системы. Особенно простым является расположение, при котором посадочные элементы 220 требуется лишь переставить, или перезажать, или перевинтить. Это имеет также то преимущество, что дефектные или изношенные посадочные элементы 220 могут быть заменены простым образом. Посадочные элементы 220 могут быть установлены в направляющих на грузовой платформе 205 также с возможностью бокового перемещения и фиксации, что обеспечивает плавное или ступенчатое регулирование ширины.
Преимущественно посадочные элементы 220 и транспортные ножки 20 выполнены с возможностью незначительной юстировки вертикального положения и/или наклонного положения или горизонтального положения конструкции 10 транспортной системы.
Грузовые блоки 204 приемников транспортных систем могут быть выполнены так, что они могут служить не только на фазах перевозки в качестве мобильных, но и на фазах монтажа в качестве стационарных опор для конструкций 10 транспортных систем.
В качестве альтернативы монтажные станции могут содержать также собственные стационарные грузовые блоки. При этом преимущественно предусмотрены посадочные элементы для ножек или посадочные элементы 220 для транспортных ножек, которые могут быть выполнены и расположены с возможностью размещения транспортных ножек 20.
В другом варианте монтажные станции могут содержать стационарные грузовые блоки 204, однако без посадочных элементов для ножек. Конструкции 10 транспортных систем устанавливают тогда для фаз монтажа вместе с их транспортными ножками 20 и посадочными элементами 220 для них или без посадочных элементов 220 на монтажных станциях на предусмотренных на них грузовых блоках 204. Затем конструкция 10 транспортной системы и/или транспортная ножка 20 опирается на грузовую платформу 205.
Ножки или транспортные ножки 20 и посадочные элементы 220, в частности, если они служат не только в качестве мобильных посадочных элементов на фазах перевозки, но и в качестве стационарных посадочных элементов на фазах монтажа, выполнены преимущественно, но необязательно, с возможностью регулирования по высоте. Этим достигается регулировка или юстировка вертикального положения отдельных опорных зон конструкций 10 транспортных систем.
Возможность регулирования по высоте может быть достигнута расположением, при котором посадочный элемент 220 имеет две несущие поверхности Т, расположенные под углом W1 к вертикальной плоскости V и симметрично ей. Размещаемая транспортная ножка 20 выполнена соответственно и, по меньшей мере, частично прилегает к этим несущим поверхностям Т. Расстояние несущих поверхностей Т от вертикальной плоскости V можно изменять. При уменьшении этого расстояния транспортная ножка 20 опускается, причем ее вертикальная ось остается на месте, так что не происходит горизонтального смещения транспортной ножки 20 и, тем самым, конструкции 10 транспортной системы. Дополнительное преимущество этого расположения состоит в облегчении опускания транспортных ножек 20, поскольку за счет наклонных несущих поверхностей Т посадочных элементов 220 в определенной степени достигается самоцентрирующее действие.
Грузовой блок 204 оснащен далее двумя размещенными на грузовых платформах 205 скобами 230 для подъема. В качестве альтернативы могут быть предусмотрены также только одна скоба для подъема, при необходимости также один или несколько рым-болтов или другие средства, которые могут захватываться подъемным краном для транспортировки приемника 200 с помощью подъемного механизма, например крана. Скобы для подъема могут быть также выполнены и расположены с возможностью их захвата и подъема вилочным приемником.
На фиг.7С стрелками B1, B2 обозначен один важный аспект. Грузовой блок 204 может перемещаться в предпочтительном варианте как вперед (стрелка B2), так и вбок (стрелка B1). Благодаря этому отпадает сложное и утомительное маневрирование очень большого и тяжелого груза или грузов. На фиг.9 этот вид поперечного перемещения находит применение на нижнем конце монтажной площадки, где происходит перемещение слева направо. Конечно, возможно также легкое, без труда встречное направлениям B1, B2 движение, т.е. назад и в другую сторону.
На фиг.8А, 8В изображен промежуточный модуль 300, а именно грузовой блок 204 с расположенной на нем конструкцией 10 транспортной системы, причем транспортные ножки 20 расположены в посадочных элементах 220.
На фиг.9 изображена монтажная площадка 400 на фазе перевозки. Монтажная площадка 400 включает в себя несколько монтажных станций 410, рассчитанных на осуществление специфических для каждой станции различных этапов монтажа, причем каждый этап монтажа может включать в себя отдельные операции. К монтажной станции 410 относятся также множество приемников 200 и система 430 управления, которая полностью или частично автоматически управляет процессами на монтажной площадке 400. Подъемный механизм 420, например портальный, мостовой или поворотный кран, служит для опускания конструкций 10 транспортных систем на приемники 200 и снятия их с приемников 200. При этом не требуются дополнительные подъемные механизмы, благодаря чему на монтажной площадке 400 отсутствуют сложные конструкции зданий, что является заметным преимуществом по сравнению с традиционными сборочными цехами.
Первый приемник 200 (на фиг.9 слева вверху) готов для приема конструкции 10 транспортной системы. Другие приемники 200 уже приняли конструкции 10 транспортных систем и образуют вместе с ними промежуточные модули 300. Промежуточные модули 300 на фазах перевозки подают посредством автономно подвижных приемников 200 по стрелкам к отдельным монтажным станциям 410 и отводят от них. Промежуточные модули 300 могут перевозиться как в их продольном направлении, так и поперек него, как между показанными на фиг.9 внизу монтажными станциями. На фазах монтажа промежуточные модули 300 находятся на монтажных станциях 410 неподвижно. По окончании всех этапов монтажа из каждого окончательно обработанного промежуточного модуля 300 удаляют конструкцию 10 транспортной системы, что может происходить с помощью уже упомянутого подъемного механизма 420, как это показано на фиг.9 вверху справа. Система 430 управления, символически обозначенная штрихпунктиром, служит для управления всем процессом производственного монтажа. Система 430 управления может охватывать также только части монтажной площадки 400, например только монтажные станции 410.
Система 430 управления может управлять монтажными станциями 410, а также полуроботами и роботами, находящимися на монтажных станциях 410, например сварочными роботами, роботами для точечной сварки, роботами для вставки стекол и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДОСТАВКИ ГРУЗОВ | 2018 |
|
RU2756702C2 |
| СИСТЕМА ЗАПУСКА И ТРАНСПОРТИРОВАНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 1999 |
|
RU2233772C2 |
| СТЫКОВОЧНАЯ СИСТЕМА КОСМИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2683706C2 |
| СИСТЕМА ПУСКА РАКЕТ И ВСПОМОГАТЕЛЬНАЯ АППАРАТУРА | 2011 |
|
RU2551047C2 |
| Система и способ хранения жидкого и газообразного топлива | 2017 |
|
RU2726886C1 |
| СИСТЕМА И СПОСОБ ДОСТАВКИ НЕФТЕПРОМЫСЛОВЫХ МАТЕРИАЛОВ | 2013 |
|
RU2644738C2 |
| ТРАНСПОРТНАЯ СИСТЕМА ("КАНАТНОЕ МЕТРО") | 2012 |
|
RU2506182C1 |
| СТРУКТУРНАЯ СИСТЕМА МОДУЛЬНОЙ ТЕХНОЛОГИЧЕСКОЙ УСТАНОВКИ | 2019 |
|
RU2758296C1 |
| СКЛАДНАЯ МОДУЛЬНАЯ МАЧТА С ВСТРОЕННОЙ СИСТЕМОЙ ВЕРХНЕГО ПРИВОДА | 2011 |
|
RU2499122C2 |
| БИМОДАЛЬНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 1995 |
|
RU2136525C1 |
Приемник (100) транспортной системы служит для размещения и перемещения конструкции (10) транспортной системы. Приемник включает в себя приводной блок (102), выполненный с возможностью соединения с конструкцией (10) транспортной системы для перемещения или транспортировки конструкции (10) транспортной системы. Приемник включает в себя далее, по меньшей мере, один первый грузовой блок (104) и второй грузовой блок (106), выполненные для размещения соответственно первой и второй опорных зон конструкции (10) транспортной системы. Грузовой блок (104, 106) содержит один или несколько посадочных элементов для транспортных ножек, например вилки или захваты для транспортных ножек, для размещения соответственно одной транспортной ножки опорной зоны конструкции (10) транспортной системы с возможностью фиксации от горизонтальных и вертикальных сдвигов вниз относительно посадочного элемента. Изобретение обеспечивает надежную и точную связь приемника с транспортной конструкцией и рационализацию проведения процесса производственного монтажа. 2 н. и 8 з.п. ф-лы, 16 ил.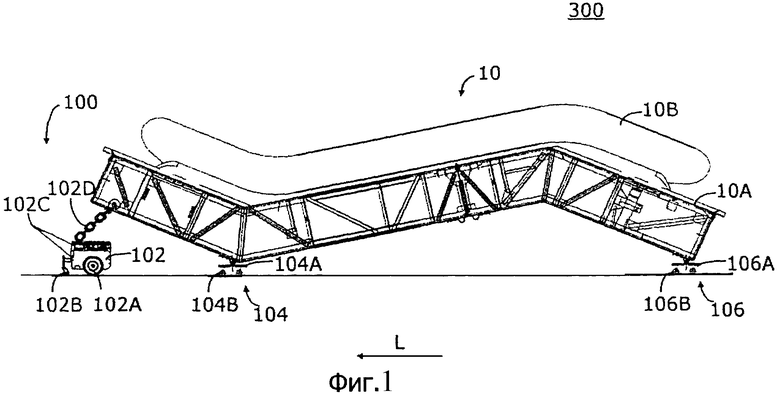
1. Приемник (100, 200) транспортной системы для размещения и перемещения конструкции (10) транспортной системы, содержащий передвижной приводной блок (102, 202), выполненный с возможностью соединения с конструкцией (10) транспортной системы для ее перемещения, и, по меньшей мере, один первый грузовой блок (104, 204) и второй грузовой блок (106, 204), выполненные с возможностью приведения в действие приводным блоком (102, 202) для размещения конструкции (10) транспортной системы, причем приводной блок (202) выполнен с возможностью пристыковки к одному из грузовых блоков (204) или приемник содержит стыковочный элемент (102D) для соединения приводного блока (102, 202) с конструкцией (10) транспортной системы, отличающийся тем, что грузовой блок (104, 106; 204) содержит один или несколько посадочных элементов (220) для транспортных ножек, например вилки или захваты для транспортных ножек, для размещения соответственно одной транспортной ножки (20) опорной зоны конструкции (10) транспортной системы с возможностью фиксации от горизонтальных и вертикальных сдвигов вниз относительно посадочного элемента (220).
2. Приемник (100, 200) по п.1, отличающийся тем, что посадочные элементы (220) для транспортных ножек расположены парами, преимущественно зеркально-симметрично продольной средней плоскости, а расстояние между посадочными элементами (220) одной пары может быть изменено для подгонки погрузчика (100, 200) по ширине к конструкции (10) транспортной системы.
3. Приемник (200) по п.1, отличающийся тем, что он содержит стыковочные средства (102D, 202D) для пристыковки приводного блока (202) к грузовому блоку (204) с первым стыковочным элементом (102D) на приводном блоке (202) и вторым стыковочным элементом (202D) на грузовом блоке (204).
4. Приемник (200) по п.3, отличающийся тем, что грузовой блок (104, 204) содержит несколько стыковочных элементов (202D), расположенных с возможностью приведения стыковочного элемента (102D) в зацепление альтернативно с одним из этих стыковочных элементов (202D) для перемещения грузового блока (104, 204) посредством приводного блока (202, 102) в разных направлениях.
5. Приемник (200) по п.4, отличающийся тем, что каждый стыковочный элемент (202D) на грузовом блоке (104, 204) содержит посадочный элемент для штыря или пальца, а стыковочный элемент (102D) на приводном блоке (202, 102) - штырь или палец.
6. Приемник (200) по любому из предыдущих пунктов, отличающийся тем, что грузовой блок (104, 204) содержит средства, например скобы или серьги (230), для подъема для обеспечения зацепления внешнего подъемного механизма.
7. Приемник (200) по п.1, отличающийся тем, что посадочные элементы для транспортных ножек имеют две несущие поверхности (Т), которые расположены по отношению друг к другу под углом (W1) и взаимное расстояние между которыми возрастает вверх и/или может регулироваться и которые служат опорами для имеющих соответствующую форму, преимущественно круглых, выпуклых, бочкообразных или шарообразных опорных поверхностей транспортной ножки (20), при этом несущие поверхности (Т) и опорные поверхности образуют систему подъема для юстировки конструкции (10) транспортной системы по высоте.
8. Приемник по п.1, отличающийся тем, что посадочные элементы (220) погрузчика (200) транспортной системы выполнены с возможностью регулирования по высоте для приведения в горизонтальное положение или горизонтальной выверки конструкции (10) транспортной системы для фазы монтажа перед осуществлением характерного для данной станции этапа монтажа.
9. Способ сборки транспортных систем, при котором из одной конструкции (10) транспортной системы и одного приемника (100, 200) транспортной системы, выполненного в соответствии с одним из пп.1-8, образуют промежуточный модуль (300), промежуточные модули (300) последовательно, тактами и/или одновременно пропускают через монтажную площадку (400), причем на фазах перевозки каждый из промежуточных модулей (300) перевозят или транспортируют между одной из монтажных станций (410) и следующей за ней монтажной станцией (410), а на фазах монтажа на соответствующих монтажных станциях (410) осуществляют характерный для каждой станции этап монтажа конструкций (10) транспортной системы промежуточных модулей (300).
10. Способ по п.9, отличающийся тем, что с помощью системы (430) управления монтажной площадки (400) каждый раз, по меньшей мере, приблизительно постоянными по времени поддерживают фазы монтажа и/или фазы перевозки и управляют перевозкой промежуточных модулей (300).
| JP 11199165 A, 07.07.1999 | |||
| JP 7315740 A, 05.12.1995 | |||
| JP 9040338 A, 10.02.1997 | |||
| Транспортное средство для перевозки крупногабаритных грузов | 1988 |
|
SU1600982A2 |
| СПОСОБ ЗАГРУЗКИ ГРУЗОВОГО СОСТАВА | 2003 |
|
RU2256021C2 |
| ПРИЦЕП-РОСПУСК | 1999 |
|
RU2173271C2 |
| СПОСОБ НАНЕСЕНИЯ ЭЛЕКТРОЛИТИЧЕСКИХ ПОКРЫТИЙ ПРИ ПОНИЖЕННОМ ДАВЛЕНИИ | 2007 |
|
RU2352692C1 |

