Изобретение относится к области измерительной техники, в частности к измерению расстояния, например, в закрытых резервуарах при измерении уровня жидкости, и основано на принципе радиолокации с частотной модуляцией (ЧМ) зондирующих радиоволн.
Широко известен радиолокационный способ измерения расстояния с ЧМ зондирующих радиоволн, основанный на спектральном анализе сигнала разностной частоты (СРЧ) при оценке задержки эхо-сигнала [1, стр.316-381; 2; 3; 4]. Для сигнала, принятого на фоне помех, созданных эхо-волнами от мешающих объектов, указанный способ имеет недостаточную точность измерения расстояния.
Близким по совокупности существенных признаков к заявляемому (аналогом) является радиолокационный способ измерения расстояния, основанный на спектральном анализе СРЧ с последующим уточнением результатов измерений на дополнительном этапе обработки СРЧ, при выполнении которого формируют эталонный сигнал, варьируют его параметры и используют для расчета расстояния, когда параметры спектра эталонного сигнала наиболее близки к параметрам спектра СРЧ [5]. Для многих случаев цитированный способ измерения расстояния не обеспечивает необходимой точности измерения при влиянии помех, не связанных с неоднородностями антенно-волноводного устройства.
Для снижения погрешности измерения расстояния, линейно связанного с частотой СРЧ и его задержкой, широко используются априорные сведения о помеховой обстановке в рабочей зоне радиолокационного дальномера [6, 7]. Для этого предварительно оценивают частоты помеховых сигналов, линейно связанные с задержками и удалением мешающих объектов, их амплитуды и записывают в память вычислительного устройства. В дальнейшем эти данные используют для компенсации помеховых слагаемых сигнала и спектра. При этом помеховые слагаемые спектра определяются в процессе калибровки радиодальномера на пустом резервуаре.
Наиболее близким по совокупности существенных признаков к заявленному (прототипом) является радиолокационный способ измерения уровня материала в резервуаре радиодальномером с ЧМ зондирующих радиоволн, основанный на спектральном анализе СРЧ, учитывающий помеховые слагаемые спектра [8]. Указанный способ включает вычисление спектра СРЧ, вычисление опорного спектра, состоящего из постоянного и варьируемого слагаемых, и вычисление меры отличия спектра СРЧ от опорного спектра. Затем производится изменение параметров варьируемого слагаемого опорного спектра до достижения минимума указанной меры отличия спектров. Параметры постоянного слагаемого опорного спектра определяются при калибровке и хранятся в памяти. Калибровка производится на рабочем месте при таком уровне заполнения резервуара, когда радиоволны отражают все мешающие объекты и отсутствует взаимное влияние боковых лепестков слагаемых спектра СРЧ, соответствующих мешающим объектам, и слагаемого спектра СРЧ, соответствующего отражению от зондируемого материала.
Для расчета измеряемого расстояния используют параметры опорного спектра, при которых обнаружен минимум меры отличия.
В трех последних цитированных способах измерения расстояния следовало бы ожидать существенного уменьшения погрешности измерения, так как запись эталонных спектров выполняют на рабочем месте при калибровочном проливе резервуара. Однако в действительности уменьшения погрешности не происходит из-за невозможности точного подбора параметров опорного спектра. Изменение температуры резервуара, его заполнение и др. факторы приводят к значительным деформациям резервуара. Из-за изменений структуры рассеянного поля в резервуаре под влиянием деформации резервуара, а также из-за осаждения на антенне и элементах конструкции резервуара малоподвижных фракций материала зондируемого объекта меняются амплитудные и фазовые соотношения в слагаемых СРЧ и, соответственно, в спектрах. В результате со временем опорные спектры и сигналы, сохраняемые в памяти, не совпадают со спектрами и сигналами, используемыми при измерении.
Следует также учитывать, что существуют помеховые слагаемые в СРЧ и, соответственно, в спектре, которые появляются только при наличии полезного сигнала. Например, на объектах нефтехимической промышленности на крупных вертикально стоящих резервуарах места установки приборов промышленной автоматики и, в частности, радиодальномеров обычно расположены вблизи вертикальной стены резервуара. В этом случае наиболее интенсивная помеха возникает из-за эхо-волн, принимаемых антенной с направления угла, образованного вертикальной стеной резервуара и поверхностью жидкости. Задержка помехового сигнала незначительно отличается от задержки полезного сигнала и изменяется в соответствии с изменением измеряемого расстояния. При этом помеховая составляющая не может быть выделена из сигнала, т.к. не разрешается по задержке с полезным сигналом и приводит к погрешности измерений.
Технический результат изобретения - уменьшение погрешности измерения расстояния из-за влияния помех за счет коррекции результатов.
Технический результат достигается тем, что в способе измерения расстояния радиодальномером с частотной модуляцией зондирующих радиоволн, включающем генерирование радиочастотного сигнала с периодической частотной модуляцией с известными значениями центральной частоты и диапазона частотной модуляции, формирование и излучение радиоволн в направлении зондируемого объекта, выделение части генерируемого радиочастотного сигнала, прием, спустя время распространения, эхо-волн и формирование из них отраженного сигнала, смешивание его с выделенной частью генерируемого радиочастотного сигнала, выделение низкочастотных составляющих результирующего сигнала, выделение из них сигнала разностной частоты (СРЧ), содержащего информацию о дальности до зондируемого объекта, аналоговую обработку СРЧ, аналого-цифровое преобразование СРЧ, вычисление спектра по цифровым отсчетам СРЧ и вычисление центральной частоты спектра, вычисление расстояния по известным скорости распространения радиоволн и центральной частоте спектра СРЧ, получение и учет априорных сведений о положении мешающих объектов и интенсивности помех от мешающих объектов при коррекции результатов вычисления расстояния до зондируемого объекта, дополнительно выполняют второе измерение расстояния до зондируемого объекта, при этом в двух измерениях спектры СРЧ формируют с разными формами основного лепестка, вычисляют разницу результатов измерений и используют эту разницу для коррекции результата измерения расстояния.
В двух измерениях спектры СРЧ формируют с разными формами основного лепестка путем перемножения цифровых отсчетов СРЧ на генерируемые цифровые отсчеты двух разных весовых функций, при этом цифровые отсчеты весовых функций генерируют по заданным дискретным отсчетам весовых функций с известными формами спектров.
Коррекцию результата измерения расстояния выполняют путем суммирования результата одного из измерений с разницей результатов двух измерений, умноженной на корректирующий коэффициент.
Корректирующий коэффициент вычисляют, используя априорные сведения о положении мешающих объектов и интенсивности помех, созданных мешающими объектами, как отношение огибающей теоретической зависимости погрешности, получаемой с одной из весовых функций, к разности огибающих теоретических зависимостей погрешностей, получаемых с разными весовыми функциями, используемыми при двух измерениях.
Априорные сведения о положении мешающих объектов и интенсивности помех определяют при калибровке на рабочем месте, на пустом резервуаре.
Априорные сведения о положении мешающих объектов и интенсивности помех определяют расчетным путем по математическим моделям помех, адекватным реальным ситуациям.
Сущность предлагаемого способа поясняется графиками, изображенными на фиг.1, фиг.3, фиг.4 и фиг.5, а также с помощью радиодальномера с частотной модуляцией зондирующих радиоволн, схематично изображенного на фиг.2.
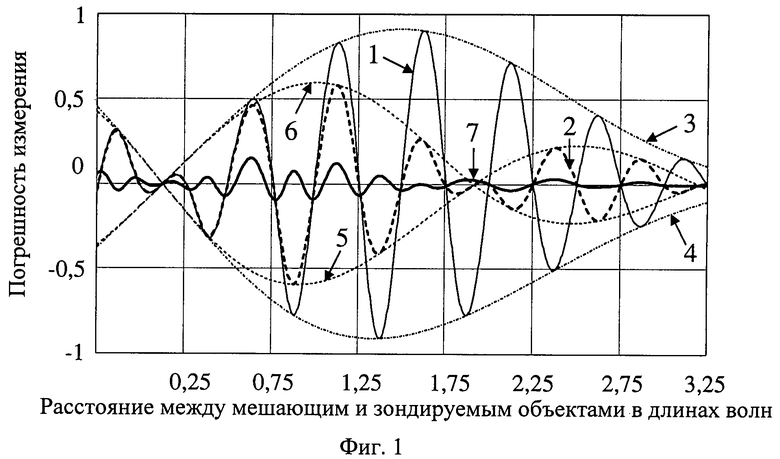
На фиг.1 приведены зависимости погрешности измеренного расстояния до зондируемого объекта от расстояния в длинах волн между зондируемым объектом и одиночным мешающим объектом, огибающие этих зависимостей и зависимость погрешности в результате осуществления предложенного способа.
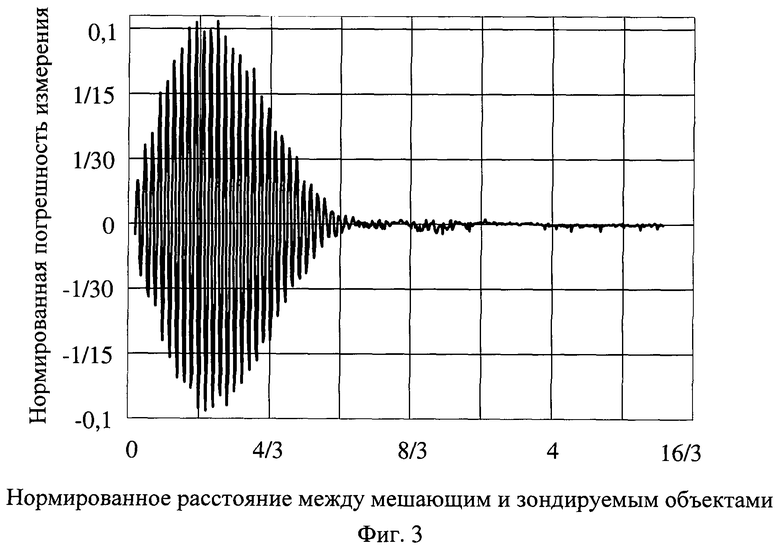
На фиг.3 приведена экспериментальная зависимость погрешности измеренного расстояния до зондируемого объекта при наличии мешающего объекта и применении весовой функции Блэкмана.
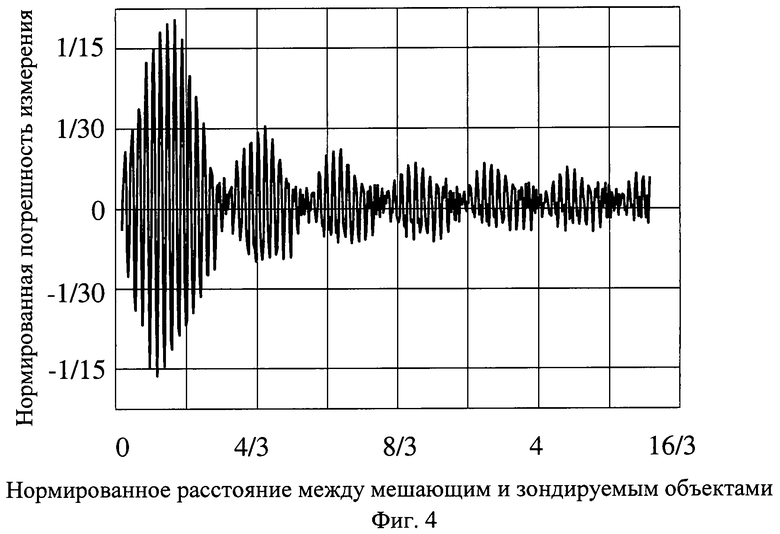
На фиг.4 приведена экспериментальная зависимость погрешности измеренного расстояния до зондируемого объекта при наличии мешающего объекта и применении равномерной весовой функции.
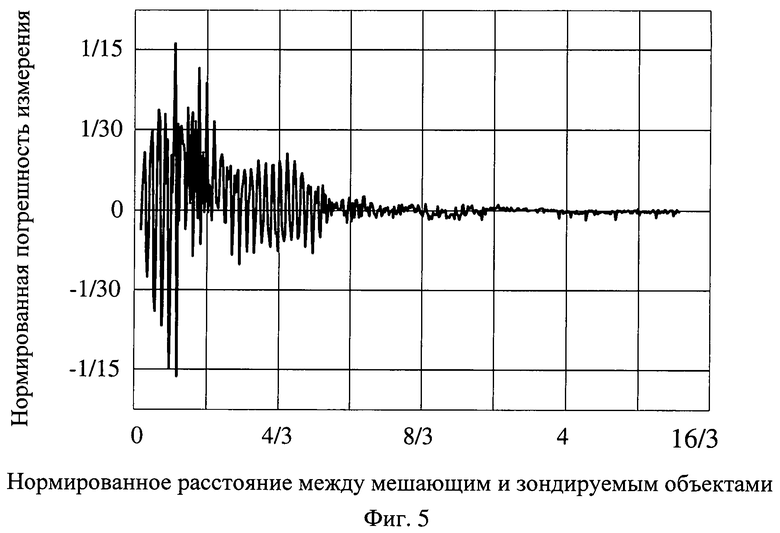
На фиг.5 приведена экспериментальная зависимость погрешности измеренного расстояния до зондируемого объекта при наличии мешающего объекта, полученная в результате применения предлагаемого способа.
Наличие мешающего объекта приводит к погрешности измерения, зависимость которой от расстояния между мешающим объектом и зондируемым объектом носит колебательный характер вокруг нулевого значения (когда расстояние измеряется без погрешности) с периодом колебаний, равным половине средней длины радиоволны, и изменяющейся амплитудой колебаний (фиг.1). Продолжительность колебаний погрешности зависит от применяемой весовой функции, а размах и, соответственно, огибающая этих колебаний зависят от отношения сигнал-помеха и от применяемой весовой функции. Но положения точек с нулевой погрешностью слабо зависят от применяемой весовой функции. На фиг.1 приведена зависимость погрешности измеренного расстояния до зондируемого объекта от расстояния в длинах волн между зондируемым объектом и одиночным мешающим объектом, создающим помеховый сигнал с амплитудой 0,1 от полезного. Диапазон ЧМ составляет 40% от центральной частоты. Сплошной тонкой линией 1 и толстой пунктирной линией 2 приведены зависимости погрешности измерения при перемножении цифровых отсчетов сигнала с генерируемыми цифровыми отсчетами соответственно весовой функции Блэкмана и равномерной весовой функции. А тонкими штрихпунктирными линиями 3 и 4 и тонкими пунктирными линиями 5 и 6 приведены огибающие погрешности измерения при перемножении цифровых отсчетов сигнала с цифровыми отсчетами соответственно весовой функции Блэкмана и равномерной весовой функции.
Благодаря достаточно стабильному положению точек, в которых погрешность измерения отсутствует, и благодаря медленному изменению огибающих колебательной зависимости погрешности изменение результата измерения практически пропорционально изменению огибающих погрешностей. Используя изменение результата измерения частоты сигнала с различными весовыми функциями, теоретические зависимости огибающих погрешности и априорные сведения об ориентировочном положении мешающего объекта и интенсивности помехи, созданной этим объектом, можно определить приближенное значение величины корректирующей поправки результатов измерения расстояния и снизить погрешность измерения. На фиг.1 сплошной толстой линией 7 приведена погрешность измерения в результате применения предложенного способа.
Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявляемого изобретения, позволяет установить, что заявителем не обнаружены технические решения, характеризующиеся признаками, идентичными всем существенным признакам заявленного изобретения. Выделение из перечня выявленных аналогов прототипа позволило выявить совокупность существенных (по отношению к усматриваемому заявителем техническому результату) отличительных признаков в заявляемом объекте, изложенных в формуле изобретения. Следовательно, заявляемое изобретение соответствует требованию "новизна" по действующему законодательству. Сведений об известности отличительных признаков в совокупностях признаков известных технических решений с достижением такого же, как у предлагаемого способа, положительного эффекта не имеется. На основании этого сделан вывод, что предлагаемое техническое решение соответствует критерию "изобретательский уровень".
Радиодальномер с частотной модуляцией зондирующих радиоволн (фиг.2) содержит: управляемый генератор радиочастотного сигнала (УГРС) 8 с одним входом и двумя выходами; схему цифровой обработки сигналов (СЦОС) 9 с тремя выходами и одним входом; антенну 10; делитель мощности (ДМ) 11 с одним входом и двумя выходами; направленный ответвитель (НО) 12 с одним входом и двумя выходами; смеситель 13 с двумя входами и одним выходом; синтезатор частоты (СЧ) 14 с одним выходом и двумя входами; схему предварительной аналоговой обработки (СПАО) 15; аналого-цифровой преобразователь (АЦП) 16 с двумя входами и одним выходом.
Выход СЧ 14 соединен с входом УГРС 8. Входы СЧ 14 соединены соответственно с первым выходом УГРС 8 и с первым выходом СЦОС 9. Второй выход УГРС 8 соединен с последовательно соединенными ДМ 11 и НО 12, а первый выход НО 12 соединен с антенной 10. Вторые выходы ДМ 11 и НО 12 соединены соответственно с первым и вторым входами смесителя 13, выход которого соединен с последовательно соединенными СПАО 15 и АЦП 16, а выход АЦП 16 и его второй вход соединены соответственно с первым входом и вторым выходом СЦОС 9. Третий выход СЦОС 9 является информационным выходом радиодальномера.
Практическая реализация устройства не представляет собой сложности и осуществляется на основе широко распространенных электронных элементов, например, производимых фирмами «ANALOG DEVICES», «MOTOROLA», «MICRONETICS», «PEREGRINE» и др.
Способ измерения расстояния осуществляют с помощью радиодальномера с частотной модуляцией зондирующих радиоволн следующим образом.
До проведения измерений определяют расстояния до мешающих объектов xi при i=2, 3,… и интенсивности помех Ui, созданных этими мешающими объектами, и записывают эти данные в память СЦОС 9 радиодальномера. Учитывая, что при цифровой обработке частоты спектра определены в виде номеров, данные о расстояниях целесообразно записывать в нормированном виде.
Частота Ωi i-й составляющей СРЧ ui (t, Ri), при линейном законе ЧМ на интервале Т, связана с задержкой эхо-сигнала τi от i-го объекта, с расстоянием Ri до i-го объекта и диапазоном частотной модуляции Δω генерируемого радиочастотного сигнала линейной зависимостью Ωi=Δω·τi/Т=Δω·2Ri/(v·Т), где v - скорость распространения электромагнитных волн. Нормированное значение разностной частоты (или расстояния) i-го слагаемого сигнала целесообразно записать в виде xi=0.5ΩiT/π=Ri·Δω/vπ.
При проведении измерений одна часть генерируемого радиочастотного сигнала с периодической частотной модуляцией в виде последовательности радиочастотных сигналов, N известных дискретных частот в которой эквидистантно распределены по диапазону частотной модуляции, от УГРС 8 (фиг.2), управляемого СЧ 14, через ДМ 11 и НО 12 поступает в антенну 10, которая формирует направленное излучение в направлении зондируемого объекта. После отражения от поверхности зондируемого объекта эхо-волны принимаются антенной 10 и преобразуются в отраженный сигнал, который через НО 12 поступает на второй вход смесителя 13. В качестве гетеродинного сигнала используют выделенную ДМ 11 вторую часть генерируемого сигнала. Выходной сигнал смесителя поступает на вход СПАО 15, где обрабатывается путем фильтрации и заданного усиления. В результате выделяются низкочастотные составляющие результирующего сигнала, из которых выделяется СРЧ uи (t, R1), содержащий информацию о дальности R1 (Ri при i=1) до зондируемого объекта. СРЧ uи (t, R1) используют для расчета расстояния. При этом в нем могут присутствовать также помеховые составляющие, созданные мешающими объектами, которые приводят к погрешности измерения. Выделенный СРЧ uи (t, R1) через АЦП 16 поступает на первый вход СЦОС 9 в виде цифровых отсчетов uци (n, R1) (где n=0,…,N-1; N - число отсчетов сигнала). С применением СЦОС 9 выполняют все действия над СРЧ, генерируют отсчеты весовых функций, управляют синтезатором СЧ 14 заданием кодов дискретных частот и синхронизируют работу АЦП 16 импульсами управления со второго выхода СЦОС 9.
Цифровые отсчеты входного сигнала СЦОС 9 uци (n, R1) умножают на генерируемые цифровые отсчеты первой весовой функции W1(n) (где n=0, …, N-1; N - число отсчетов сигнала и, соответственно, число генерируемых отсчетов весовой функции) с известной формой основного лепестка спектра (например, весовой функции Блэкмана). Применяя прямое преобразование Фурье, вычисляют спектр полученного произведения, вычисляют центральную частоту спектра, вычисляют расстояние xиз1 по известным скорости распространения радиоволн и центральной частоте спектра и записывают это расстояние в память СЦОС 9.
Затем вновь получают цифровые отсчеты выделенного СРЧ, умножают на цифровые отсчеты второй весовой функции W2(n), n=0, …, N-1 с другой известной формой основного лепестка спектра (например, равномерной ВФ), вычисляют спектр этого произведения, вычисляют и записывают расстояние хиз2. Вычисляют разность расстояний, полученных в двух измерениях Δхиз=xиз1-xиз2, и вычисляют величину корректирующей поправки результатов измерения расстояния
Δxкорр=Δxиз·K,
где  - коэффициент коррекции;
- коэффициент коррекции;
Δxог1, Δxог2 - теоретические огибающие погрешности измерения расстояния с первой и второй весовой функцией.
Скорректированное расстояние х1корр определяется выражением
x1корр=xиз1+Δxкорр или x1корр=xиз2-Δxкорр.
Вычисляют абсолютное значение скорректированного расстояния
R1корр=x1корр·vπ/Δω.
С третьего выхода СЦОС 9 скорректированный результат измеренного расстояния поступает на выход устройства.
Теоретические огибающие погрешности измерения расстояния с первой и второй весовой функцией могут быть определены, например, из уравнения для измерения расстояния по положению максимума модуля суммарного спектра информационного и помехового слагаемых сигнала
где  - спектр i-го слагаемого сигнала, определенный известным спектром весовой функции;
- спектр i-го слагаемого сигнала, определенный известным спектром весовой функции;
х=0.5Ω2T/π=R·Δω/vπ - нормированное значение текущей частоты (или расстояния).
Из приведенного уравнения погрешность измерения нормированного расстояния до зондируемого объекта Δx1 может быть определена с использованием формулы Тейлора, например, выражением

где  при i=2, 3,… - первая производная амплитудного спектра помехи на дальности зондируемого объекта;
при i=2, 3,… - первая производная амплитудного спектра помехи на дальности зондируемого объекта;
 при i=2, 3,… - третья производная амплитудного спектра помехи на дальности зондируемого объекта;
при i=2, 3,… - третья производная амплитудного спектра помехи на дальности зондируемого объекта;


ωср - центральная частота диапазона частотной модуляции генерируемого радиочастотного сигнала;
φi при i=2, 3,… - фаза коэффициента отражения радиоволн от мешающего объекта;
φ1 - фаза коэффициента отражения радиоволн от зондируемого объекта;
Si(x1) - амплитудный спектр помехи на дальности зондируемого объекта;
S1(0) - амплитудный спектр сигнала от зондируемого объекта на его дальности;
 - вторая производная амплитудного спектра сигнала от зондируемого объекта на его дальности;
- вторая производная амплитудного спектра сигнала от зондируемого объекта на его дальности;
 - вторая производная амплитудного спектра помехи на дальности зондируемого объекта.
- вторая производная амплитудного спектра помехи на дальности зондируемого объекта.
Теоретические огибающие погрешности Δx1ог1 и Δx1ог2 определяют приведенным выражением для погрешности Δх1 при cos(Фn-Ф1)=1 и cos(Фn-Ф1)=-1.
На фиг.3, 4, 5 приведены экспериментальные нормированные зависимости погрешности измеренного расстояния до зондируемого объекта от нормированного расстояния между зондируемым и мешающим объектами, полученные соответственно при перемножении цифровых отсчетов сигнала с цифровыми отсчетами весовой функции Блэкмана, при перемножении цифровых отсчетов сигнала с цифровыми отсчетами равномерной весовой функции и при применении предлагаемого способа. Приведенные результаты получены с диапазоном ЧМ 10% от центральной частоты.
Из чертежа следует, что при наличии помех осуществление способа приводит к снижению максимальных значений погрешности от 1,5 до 6 раз.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Виницкий А.С. «Очерк основ радиолокации при непрерывном излучении радиоволн», М.: Советское радио, 1961.
2. Патент США №5546088, 13.08.1996.
3. Патент США №6107957, 22.08.2000.
4. Патент США №5504490 A, G01S 13/08, от 02.04.1996.
5. Патент 2234688 РФ, МКИ G01F 23/28, G01N 27/26. Способ измерения электрофизических параметров зондируемого материала и расстояния до него (варианты), устройство для его осуществления и способ калибровки этого устройства / Б.А.Атаянц, В.М.Давыдочкин, В.В.Езерский, В.А.Пронин. №2003101694/09; заявл. 23.01.2003; опубл. 20.08.2004, бюл. №23.
6. Brumbi D. Fundamentals of Radar Technology for Level Gauging. 3-rd Revision, Krohne Messtechnik, Duisburg. 1999.
7. Bruimbi D. Low power FMCW radar system for level gauging //2000 IEEE MTT-S International microwave symposium digest, vol.3, 2000. P.1559-1562.
8. Патент РФ №2244268, МКИ G01F 23/28, G01S 13/08. Заявл. 04.03.2003 г.; №2003105994. Опубл. 10. 01. 2005 г. Бюл. №1. Способ измерения уровня материала в резервуаре. Б.А.Атаянц, В.В.Езерский, В.С.Паршин.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И РАДИОДАЛЬНОМЕР С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ ЗОНДИРУЮЩИХ РАДИОВОЛН | 2010 |
|
RU2434242C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ РАДИОДАЛЬНОМЕРОМ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ ЗОНДИРУЮЩИХ РАДИОВОЛН (ВАРИАНТЫ) | 2010 |
|
RU2423723C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ РАДИОДАЛЬНОМЕРОМ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2017 |
|
RU2654215C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 2017 |
|
RU2661488C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ РАДИОДАЛЬНОМЕРОМ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ РАДИОВОЛН (ВАРИАНТЫ) | 2006 |
|
RU2309428C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ И РАДИОДАЛЬНОМЕР С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2017 |
|
RU2655746C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И РАДИАЛЬНОЙ СКОРОСТИ | 2024 |
|
RU2840790C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОЛЩИНЫ ЛЬДА И ОПРЕДЕЛЕНИЯ СВОЙСТВ ПОДСТИЛАЮЩЕЙ СРЕДЫ ПОДО ЛЬДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2014 |
|
RU2550363C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ МАТЕРИАЛА В РЕЗЕРВУАРЕ | 2008 |
|
RU2410650C2 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ МАТЕРИАЛА В РЕЗЕРВУАРЕ | 2009 |
|
RU2399888C1 |
Изобретение относится к области измерительной техники, в частности к измерению расстояния, например, в закрытых резервуарах при измерении уровня жидкости, и основано на принципе радиолокации с частотной модуляцией зондирующих радиоволн. Способ измерения расстояния радиодальномером с частотной модуляцией зондирующих радиоволн заключается в дополнительном втором измерении расстояния до зондируемого объекта, при этом в двух измерениях спектры сигнала разностной частоты формируют с разными формами основного лепестка, вычисляют разницу результатов измерений и используют эту разницу и априорные сведения о положении и интенсивности помех от мешающих объектов для коррекции результата измерения расстояния. Технический результат заключается в уменьшении погрешности измерения расстояния из-за влияния помех. 5 з.п. ф-лы, 5 ил.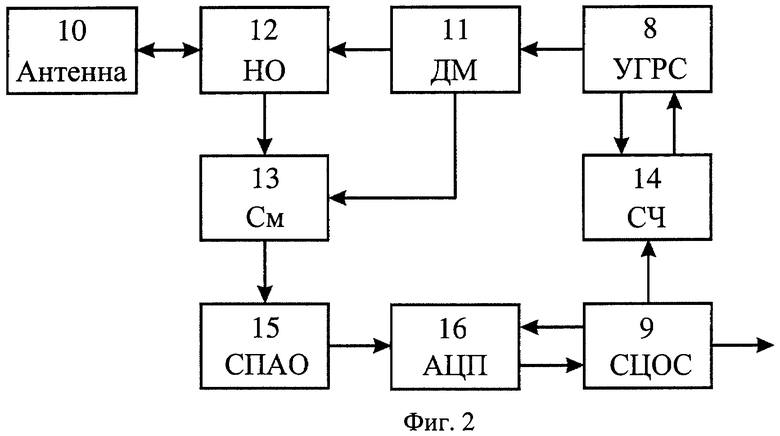
1. Способ измерения расстояния радиодальномером с частотной модуляцией зондирующих радиоволн, включающий генерирование радиочастотного сигнала с периодической частотной модуляцией с известными значениями центральной частоты и диапазона частотной модуляции, формирование и излучение радиоволн в направлении зондируемого объекта, выделение части генерируемого радиочастотного сигнала, прием, спустя время распространения, эхо-волн и формирование из них отраженного сигнала, смешивание его с выделенной частью генерируемого радиочастотного сигнала, выделение низкочастотных составляющих результирующего сигнала, выделение из них сигнала разностной частоты (СРЧ), содержащего информацию о дальности до зондируемого объекта, аналоговую обработку СРЧ, аналого-цифровое преобразование СРЧ, вычисление спектра по цифровым отсчетам СРЧ и вычисление центральной частоты спектра, вычисление расстояния по известным скорости распространения радиоволн и центральной частоте спектра СРЧ, получение и учет априорных сведений о положении мешающих объектов и интенсивности помех от мешающих объектов при коррекции результатов вычисления расстояния до зондируемого объекта, отличающийся тем, что дополнительно выполняют второе измерение расстояния до зондируемого объекта, при этом в двух измерениях спектры СРЧ формируют с разными формами основного лепестка, вычисляют разницу результатов измерений и используют эту разницу для коррекции результата измерения расстояния.
2. Способ измерения расстояния по п.1, отличающийся тем, что в двух измерениях спектры СРЧ формируют с разными формами основного лепестка путем перемножения цифровых отсчетов СРЧ на генерируемые цифровые отсчеты двух разных весовых функций, при этом цифровые отсчеты весовых функций генерируют по заданным дискретным отсчетам весовых функций с известными формами спектров.
3. Способ измерения расстояния по п.1, отличающийся тем, что коррекцию результата измерения расстояния выполняют путем суммирования результата одного из измерений с разницей результатов двух измерений, умноженной на корректирующий коэффициент.
4. Способ измерения расстояния по п.3, отличающийся тем, что корректирующий коэффициент вычисляют, используя априорные сведения о положении мешающих объектов и интенсивности помех, созданных мешающими объектами, как отношение огибающей теоретической зависимости погрешности, получаемой с одной из весовых функций, к разности огибающих теоретических зависимостей погрешностей, получаемых с разными весовыми функциями, используемыми при двух измерениях.
5. Способ измерения расстояния по п.1, отличающийся тем, что априорные сведения о положении мешающих объектов и интенсивности помех определяют при калибровке на рабочем месте, на пустом резервуаре.
6. Способ измерения расстояния по п.1, отличающийся тем, что априорные сведения о положении мешающих объектов и интенсивности помех определяют расчетным путем по математическим моделям помех, адекватным реальным ситуациям.
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ МАТЕРИАЛА В РЕЗЕРВУАРЕ | 2003 |
|
RU2244268C2 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ РАДИОВЫСОТОМЕР | 2003 |
|
RU2263330C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2234108C1 |
| СПОСОБ РАДИОЛОКАЦИИ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ НЕПРЕРЫВНОГО ЗОНДИРУЮЩЕГО СИГНАЛА | 2002 |
|
RU2241241C2 |

