Изобретение относится к области измерительной техники, в частности, к измерению расстояния.
Известны способы измерения расстояния, основанные на принципе радиолокации в радиочастотном диапазоне с частотной модуляцией излучаемого сигнала.
Известен способ измерения расстояния, являющийся аналогом, реализованный в устройстве [1], заключающийся в том, что излучают частотно-модулированный радиосигнал в направлении поверхности контролируемой среды, принимают спустя время распространения отраженный сигнал и смешивают его с частью излучаемого сигнала для получения сигнала разностной частоты. Фазу этого сигнала используют для измерения расстояния до поверхности контролируемой среды, при условии поддержания постоянной самой разностной частоты, путем управления периодом модуляции. При этом фаза сигнала разностной частоты при изменении расстояния будет непрерывно меняться в пределах 2π N+α пропорционально изменению расстояния. Здесь N - целое число периодов сигнала разностной частоты, содержащееся в периоде модуляции, α - число, соответствующее оставшейся части периода, т.е. начальная фаза сигнала разностной частоты. Таким образом, определение расстояния сводится к подсчету числа N, измерению фазы α и вычислению расстояния.
Недостатком способа является зависимость результатов от нелинейности модуляционной характеристики передатчика, т.к. при этом мгновенная частота сигнала биений непрерывно меняется и, поэтому, ее не удается поддерживать постоянной. Можно поддерживать постоянной среднюю частоту, но ее величина сильно зависит от изменения формы модуляционной характеристики при изменении температуры. По этой же причине не удается измерить точное значение фазы сигнала разностной частоты. Вследствие этого результаты определения расстояния также сильно зависят от температуры окружающей среды.
Также известен способ измерения расстояния, являющийся аналогом, реализованный в устройстве [2], заключающийся в том, что производится излучение частотно-модулированного радиосигнала в направлении поверхности контролируемой среды, прием спустя время распространения отраженного сигнала, смешивание его с частью излучаемого сигнала для получения сигнала разностной частоты, определение моментов появления характерных точек сигнала разностной частоты (например, экстремумов или нулей), накопление значений весовой функции, соответствующих моментам появления характерных точек сигнала, и вычисление расстояния по накопленной сумме значений. Недостатком данного метода является сильная зависимость результата расчета от нелинейности модуляционной характеристики передатчика и, как следствие, от температуры, т.к. нелинейность значительно изменяется при изменении температуры.
Также известен способ измерения расстояния, являющийся прототипом, реализованный в устройстве [3], заключающийся в излучении частотно-модулированного радиосигнала в направлении контролируемой среды, приеме спустя время распространения отраженного сигнала, смешивании его с частью излучаемого сигнала для получения сигнала разностной частоты, формировании двух импульсных сигналов в моменты совпадения частоты излучаемого сигнала с двумя заранее заданными эталонными частотами, измерения длительности интервала времени между этими сигналами и поддержания этой длительности постоянной путем сравнения ее с длительностью эталонного интервала времени и соответствующего изменения амплитуды симметричного треугольного модулирующего напряжения, формировании импульсных сигналов, соответствующих экстремумам сигнала разностной частоты, изменении знака производной модулирующего симметричного треугольного напряжения в момент появления одного из этих импульсов после достижения частотой излучаемого сигнала одного из двух вышеуказанных заранее заданных значений, измерении разностной частоты полученного непрерывного сигнала в течение измерительного интервала, выбранного так, чтобы уменьшить дискретную ошибку счета периодов до допустимого значения, и расчете расстояния по этой частоте. Недостатком этого метода также является зависимость результатов измерения от нелинейности модуляционной характеристики и, следовательно, от температуры окружающей среды.
Таким образом, общим недостатком аналогов и прототипа является невысокая точность и стабильность измерений вследствие зависимости результатов измерения от температуры окружающей среды.
Цель изобретения - повышение точности измерения в диапазоне температур путем снижения зависимости результатов измерения от нелинейности модуляционной характеристики передатчика.
Цель достигается тем, что в способе измерения расстояния от излучателя до поверхности материала, заключающемся в излучении в направлении контролируемой поверхности радиочастотного сигнала с периодической частотной модуляцией, приеме спустя время распространения отраженного сигнала, смешивании его с частью излучаемого сигнала и получении сигнала разностной частоты, формировании двух импульсных сигналов в моменты совпадения частоты излучаемого сигнала с двумя заранее заданными эталонными частотами, дополнительно измеряют зависимость от времени моментов появления характерных точек сигнала разностной частоты (например, экстремумов или нулей) внутри периода модуляции и временные положения двух импульсных сигналов, полученных в моменты совпадения излучаемых и эталонных частот. Проведение дополнительных измерений позволяет учесть нелинейность модуляционной характеристики при расчете расстояния и тем самым ослабить ее влияние на результат измерения, а значит, и влияние температуры окружающей среды.
Возможны два варианта использования новой совокупности и порядка осуществления действий над сигналом.
Сущность первого варианта предлагаемого способа заключается в том, что для измерения расстояния от излучателя до поверхности материала излучают в направлении контролируемой поверхности радиочастотный сигнал с периодической частотной модуляцией, принимают спустя время распространения отраженный сигнал, смешивают его с частью излучаемого сигнала и получают сигнал разностной частоты. Кроме того, формируют два импульсных сигнала в моменты совпадения частоты излучаемого сигнала с двумя заранее заданными эталонными частотами. Для устранения влияния, нелинейности модуляционной характеристики на результаты определения расстояния дополнительно измеряют зависимость от времени моментов появления характерных точек сигнала разностной частоты (например, экстремумов или нулей) внутри периода модуляции и временные положения двух импульсных сигналов, полученных в моменты совпадения излучаемых и эталонных частот, используя которые дополнительно вычисляют диапазон перестройки частоты излучаемого сигнала Δ fm, соответствующий следующим подряд друг за другом (m+1) характерным точкам сигнала разностной частоты и вычисляют расстояние по формуле:
где v - скорость распространения электромагнитной волны над контролируемой поверхностью.
Расчет основан на том, что при неизменном измеряемом расстоянии и любых внешних условиях величина Δ fm остается неизменной для любых двух характерных точек сигнала разностной частоты, разнесенных по оси времени на интервал, кратный половине периода сигнала разностной частоты. Это объясняется тем, что приращение фазы сигнала разностной частоты Δ ϕ при переходе от одной характерной точки к другой, соседней, т.е. через один полупериод, равно π , а при переходе через m полупериодов:
Δ ϕ =2π Δ fmt3=2π mΔ f1t3=mπ ,
где t3 - время распространения сигнала, которое не изменяется при неизменном расстоянии.
Для вычисления Δ fm используется аппроксимация зависимости частоты излучаемого сигнала F от времени t нелинейной функцией F=s(t) с использованием измеренной зависимости от времени моментов появления характерных точек сигнала разностной частоты (например, экстремумов или нулей) внутри периода модуляции и временных положений двух импульсных сигналов, полученных в моменты совпадения излучаемых и эталонных частот.
Сущность второго варианта предлагаемого способа заключается в том, что для измерения расстояния от излучателя до поверхности материала излучают в направлении контролируемой поверхности радиочастотный сигнал с периодической частотной модуляцией, принимают спустя время распространения отраженный сигнал, смешивают его с частью излучаемого сигнала и получают сигнал разностной частоты. Кроме того, формируют два импульсных сигнала в моменты совпадения частоты излучаемого сигнала с двумя заранее заданными эталонными частотами, являющиеся границами интервала анализа внутри периода модуляции, вычисляют расстояние R по известной скорости распространения радиоволн в среде над измеряемой поверхностью v и по известной разности указанных эталонных частот Δ F. Для уменьшения влияния нелинейности модуляционной характеристики на результаты измерения дополнительно измеряют зависимость от времени моментов появления характерных точек сигнала разностной частоты (например, экстремумов или нулей) внутри периода модуляции и временные положения ta1 и ta2 двух импульсных сигналов, полученных в моменты совпадения излучаемых и эталонных частот, и вычисляют расстояние по формуле:
где k - число целых периодов сигнала разностной частоты внутри интервала анализа;x - дополнительная поправка, являющаяся оставшейся частью полупериода сигнала разностной частоты, вычисленная по измеренной зависимости от времени моментов появления характерных точек сигнала разностной частоты (например, экстремумов или нулей) внутри периода модуляции и по временным положениям двух импульсных сигналов, полученных в моменты совпадения излучаемых и эталонных частот.
Сумму целого числа полупериодов сигнала разностной частоты и дополнительной поправки вычисляют по выражению:

где  - весовая функция;
- весовая функция;
tj=(j+1-x1)Tср - расчетный j-й момент появления характерной точки сигнала разностной частоты с усредненным периодом, считая от начала интервала анализа;
 - средний период сигнала разностной частоты;
- средний период сигнала разностной частоты;
Тa=ta2-ta1 - длительность интервала анализа;
x1 и х2 - нормированные положения граничных точек интервала анализа относительно левых границ соответствующих полупериодов сигнала разностной частоты, вычисленные путем интерполяции измеренной зависимости от времени моментов появления характерных точек сигнала разностной частоты (например, экстремумов или нулей) на начальном и конечном участках периода модуляции с использованием временных положений двух импульсных сигналов, полученных в моменты совпадения излучаемой и эталонных частот;
Кв - постоянный коэффициент, зависящий от вида весовой функции [2].
Частотная модуляция при указанных измерениях осуществляется таким образом, что за границами интервала анализа, но внутри периода модуляции имеется не менее одной характерной точки сигнала разностной частоты с каждой стороны.
Оба варианта предлагаемого способа относятся к объектам одного вида, одинакового назначения и обеспечивающих получение одного и того же технического результата.
Заявленные варианты способа измерения расстояния обладают совокупностью признаков, неизвестных из уровня техники для способов и устройств подобного назначения, что позволяет сделать вывод о соответствии критерию "новизна". Для доказательства изобретательского уровня необходимо учесть следующее:
1. В известном способе измерения расстояния [1], основанном на измерении части периода сигнала разностной частоты путем измерения его фазы, предполагается линейное изменение частоты генератора. При нелинейной модуляционной характеристике возникают существенные погрешности измерения, вызванные изменением мгновенной частоты разностного сигнала и погрешностью измерения фазы сигнала. В заявленном способе измерения расстояния за счет проведения дополнительных измерений зависимости от времени моментов появления характерных точек сигнала разностной частоты внутри периода модуляции и временных положений двух импульсных сигналов, полученных в моменты совпадения излучаемых и эталонных частот, производится корректировка результатов расчета, учитывающая нелинейность модуляционной характеристики передатчика. При этом в первом варианте осуществления способа по указанной зависимости производят уточнение диапазона перестройки передатчика, соответствующего целому числу полупериодов сигнала разностной частоты внутри периода модуляции. Во втором варианте по этой зависимости уточняют часть периода сигнала разностной частоты, дополнительно укладывающуюся в интервале анализа помимо целого числа этих периодов. Указанные уточнения позволяют скорректировать результат расчета расстояния при нелинейной модуляционной характеристике передатчика.
2. В известном способе диапазон перестройки частоты передатчика предполагается известным, однако не оговорено, каким образом это достигается. Поэтому при изменении температуры появится дополнительная температурная составляющая погрешности, вызванная изменением этого диапазона.
В заявляемом способе диапазон перестройки частоты передатчика не фиксирован. Необходимое для вычисления расстояния значение диапазона перестройки частоты в первом варианте осуществления способа находят расчетным путем, используя результаты дополнительных измерений зависимости от времени моментов появления характерных точек сигнала разностной частоты внутри периода модуляции и временных положений двух импульсных сигналов, соответствующих известным эталонным частотам, а во втором варианте - по эталонным частотам, формируя полный диапазон перестройки таким образом, чтобы в течение периода модуляции до нижней эталонной частоты и за верхней эталонной частотой формировались не менее чем по одной характерной точке в сигнале разностной частоты.
Указанные отличия не следуют явным образом из доступных научно-технических источников, что позволяет сделать вывод о соответствии заявленного технического решения критерию изобретения "изобретательский уровень".
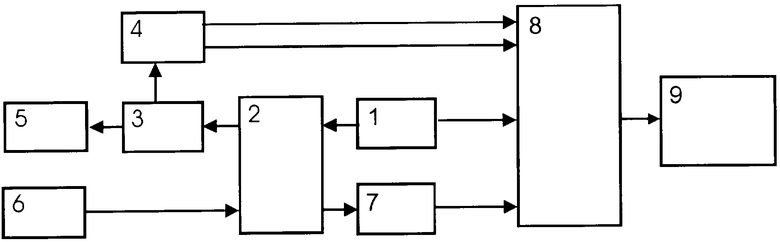
Реализацию заявленного способа можно осуществить устройством, структурная схема которого приведена на чертеже. Устройство содержит модулятор 1, приемопередающий СВЧ модуль 2, направленный ответвитель 3, формирователь частотных меток 4, передающую антенну 5, приемную антенну 6, схему предварительной аналоговой обработки 7, микропроцессор 8 и индикатор 9. Первый выход модулятора 1 соединен с модулирующим входом приемопередающего СВЧ модуля 2. СВЧ выход приемопередающего СВЧ модуля 2 соединен со входом направленного ответвителя 3, первый выход которого соединен со входом формирователя частотных меток 4, а второй выход с передающей антенной 5. Выход приемной антенны 6 соединен с СВЧ входом приемопередающего СВЧ модуля 2. Выход сигнала разностной частоты приемопередающего СВЧ модуля 2 соединен со входом схемы предварительной аналоговой обработки 7. Второй выход модулятора 1, первый и второй выходы формирователя частотных меток 4 и выход схемы предварительной аналоговой обработки 7 соединены с соответствующими входами микропроцессора 8. Выход микропроцессора 8 соединен с индикатором 9.
Устройство работает следующим образом. Модулятор 1 формирует симметричное треугольное напряжение, которое поступает на модулирующий вход приемопередающего СВЧ модуля 2 и модулирует передатчик этого модуля по частоте. Сформированный частотно-модулированный сигнал поступает в направленный ответвитель 3.
Одна часть сформированного сигнала с первого выхода направленного ответвителя 3 поступает на вход формирователя частотных меток 4. Формирователь частотных меток 4 вырабатывает на двух своих выходах два коротких импульсных сигнала в моменты совпадения частоты передаваемого сигнала с заранее заданными частотами (например, с помощью диэлектрических резонаторов).
Вторая часть сформированного сигнала со второго выхода направленного ответвителя 3 поступает в передающую антенну 5 и излучается в направлении поверхности контролируемой среды. Отраженный сигнал спустя время распространения поступает в приемную антенну 6 и с ее выхода на приемный вход приемопередающего СВЧ модуля 2. Сигнал разностной частоты с выхода приемопередающего СВЧ модуля 2 поступает на вход схемы предварительной аналоговой обработки 7, где он подвергается фильтрации и усилению до ограничения и превращения в импульсы прямоугольной формы. Фронты этих импульсов соответствуют пересечению сигналом разностной частоты нулевого уровня. Импульсный сигнал со второго выхода модулятора 1, соответствующий половине периода модуляции, короткие импульсные сигналы с первого и второго выходов формирователя частотных меток 4 и импульсные сигналы с выхода схемы предварительной аналоговой обработки 7 поступают на соответствующие входы микропроцессора 8. Передний фронт импульса со второго выхода модулятора 1 запускает внутренний счетчик микропроцессора 8. Далее, в течение длительности половины периода модуляции передние фронты импульсов, поступающих с выходов формирователя частотных меток 4 и с выхода схемы предварительной аналоговой обработки 7, генерируют прерывания процессора 8. Соответствующие подпрограммы обработки прерываний записывают в память микропроцессора 8 числа, накопленные к этому моменту времени во внутреннем счетчике микропроцессора 8. Задний фронт импульса со второго выхода модулятора останавливает внутренний счетчик микропроцессора 8 и запускает программу расчета расстояния с учетом измеренной зависимости от времени моментов появления характерных точек сигнала разностной частоты и временных положений двух импульсных сигналов, полученных в моменты совпадения излучаемых и эталонных частот.
Для учета указанной зависимости в первом варианте предлагаемого способа необходимо выбрать вид аппроксимирующей функции. В частности, можно получить решение в законченном виде при аппроксимации этой зависимости полиномом степени n:

где (n+1) - число характерных точек сигнала разностной частоты внутри периода модуляции, используемое при расчете;
аi - постоянные коэффициенты.
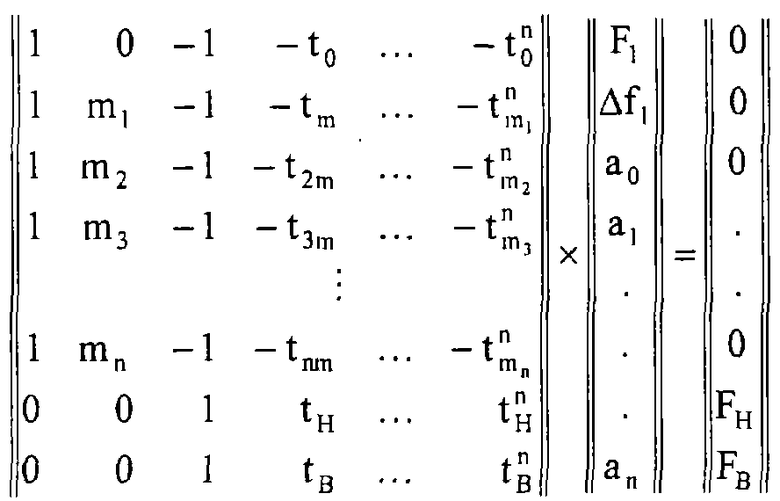
Используя эту формулу, результаты измерения зависимости от времени моментов появления характерных точек сигнала разностной частоты и временных положений двух импульсных сигналов, полученных в моменты совпадения излучаемых и эталонных частот, можно составить систему из (n+3) линейных уравнений относительно (n+1)-гo неизвестных коэффициентов аi, частоты появления первой характерной точки сигнала разностной частоты F1 и диапазона перестройки частоты между двумя соседними характерными точками сигнала разностной частоты Δ f1:

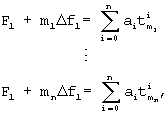
где ti - момент появления i-й характерной точки сигнала разностной частоты;
m1...mn - номера используемых при расчете характерных точек;
FH и FВ - соответственно нижняя и верхняя эталонные частоты;
tH и tВ - моменты совпадения излучаемой и соответствующей эталонной частоты. Степень полинома n и, следовательно, число используемых при расчете характерных точек зависит от требуемой точности аппроксимации, но не может превышать общего числа указанных точек внутри периода модуляции. В матричной форме указанная система уравнений имеет вид:
Из этой системы уравнений определяют:

где Δ - определитель матрицы коэффициентов указанной системы уравнений;
Аi,j - соответствующее алгебраическое дополнение.
Для составления этой системы уравнений и нахождения диапазона перестройки могут использоваться любые характерные точки из числа измеренных. В частности, можно выбирать характерные точки с постоянным шагом между ними, равным некоторому числу целых полупериоде в m.
Тогда

Таким образом, определение диапазона перестройки частоты излучаемого сигнала производится по формулам (4), (5) и затем по формуле (1) производится расчет измеряемого расстояния.
Во втором варианте предлагаемого способа по формуле (3) производится определение суммы целого числа полупериодов сигнала разностной частоты, попавших в интервал анализа, и дополнительной поправки, являющейся оставшейся частью полупериода сигнала разностной частоты, и затем по формуле (2) расчет измеряемого расстояния.
Результат расчета поступает с выхода микропроцессора 8 на индикатор 9 и процесс измерения повторяется.
Численное моделирование предлагаемого способа на компьютере и испытание макета описанного устройства подтверждают его эффективность. Погрешность измерения в диапазоне температур примерно в 10 раз меньше по сравнению с прототипом.
Источники информации
1. Марфин В.П., Кузнецов В.И., Розенфельд Ф.З. СВЧ уровнемер //Приборы и системы управления, 1979, № 11, с.28-29.
2. Заявка Японии N 30-1591, G 01 S 13/34.
3. Патент РФ № 2151408, G 01 S 13/34.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ ИЗЛУЧАТЕЛЯ ДО КОНТРОЛИРУЕМОЙ СРЕДЫ | 2010 |
|
RU2436117C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЗОНДИРУЮЩЕГО ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ДЛЯ ДАЛЬНОМЕРА С ПЕРИОДИЧЕСКОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2003 |
|
RU2234716C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 2003 |
|
RU2234717C1 |
| РАДИОЛОКАЦИОННЫЙ ДАЛЬНОМЕР | 1999 |
|
RU2151408C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ РАССТОЯНИЯ | 2012 |
|
RU2535927C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ОТ ИЗЛУЧАТЕЛЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА НА ОСНОВЕ ЧМ ЛОКАТОРА | 2014 |
|
RU2567866C2 |
| РАДИОЛОКАЦИОННЫЙ УРОВНЕМЕР | 2012 |
|
RU2518373C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИЭЛЕКТРИЧЕСКОЙ ПРОНИЦАЕМОСТИ ЖИДКОСТИ В ЕМКОСТИ | 2014 |
|
RU2575767C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ МАТЕРИАЛА В РЕЗЕРВУАРЕ | 2003 |
|
RU2244268C2 |
| Способ определения координат нелинейного рассеивателя комбинационным радиолокатором | 2024 |
|
RU2839938C1 |
Изобретение относится к области измерительной техники, в частности к измерению расстояния. Технический результат - повышение точности и стабильности измерений в диапазоне температур. Предлагаются два варианта способа измерения расстояния, которые заключаются в том, что для измерения расстояния от излучателя до поверхности материала излучают в направлении контролируемой поверхности радиочастотный сигнал с периодической частотной модуляцией, принимают спустя время распространения отраженный сигнал, смешивают его с частью излучаемого сигнала и получают сигнал разностной частоты, формируют два импульсных сигнала в моменты совпадения частоты излучаемого сигнала с двумя заранее заданными эталонными частотами, измеряют зависимость от времени моментов появления характерных точек сигнала разностной частоты (например, экстремумов или нулей) внутри периода модуляции и временные положения двух импульсных сигналов, полученных в моменты совпадения излучаемых и эталонных частот. Используя результаты дополнительных измерений, в первом варианте дополнительно вычисляют диапазон перестройки частоты излучаемого сигнала, соответствующий следующим подряд друг за другом нескольким характерным точкам сигнала разностной частоты, и вычисляют расстояние. Во втором варианте по результатам дополнительных измерений находят сумму целого числа полупериодов сигнала разностной частоты и дополнительной поправки, являющейся оставшейся частью периода, и по этой величине вычисляют расстояние. 2 с. и 3 з.п. ф-лы, 1 ил.

где v - скорость распространения электромагнитных волн в среде над контролируемой поверхностью.
где v - скорость распространения электромагнитных волн в среде над контролируемой поверхностью;
ΔF - разность эталонных частот.
где  - весовая функция;
- весовая функция;
tj=(j+1-x1)Tср - расчетный j-й момент появления характерной точки сигнала разностной частоты с усредненным периодом, считая от начала интервала анализа;
 - средний период сигнала разностной частоты
- средний период сигнала разностной частоты
на интервале анализа;
Та=ta2-ta1 - длительность интервала анализа;
Кв - постоянный коэффициент, зависящий от вида весовой функции.
| РАДИОЛОКАЦИОННЫЙ ДАЛЬНОМЕР | 1999 |
|
RU2151408C1 |
| РАДИОЛОКАЦИОННЫЙ УРОВНЕМЕР | 1999 |
|
RU2159923C1 |
| US 2001054976 A1, 27.12.2001 | |||
| СПОСОБ ПОЛУЧЕНИЯ СЛОЖНЫХ УДОБРЕНИЙ | 0 |
|
SU196900A1 |
| US 2001035839 A1, 01.11.2001. | |||

