Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах автоматического уп- р авления и контроля в качестве преобразователя угла поворота вала в код.
Цель изобретения - повышение быстродействия и надежности преобразования уг-, ла поворота вала в код.
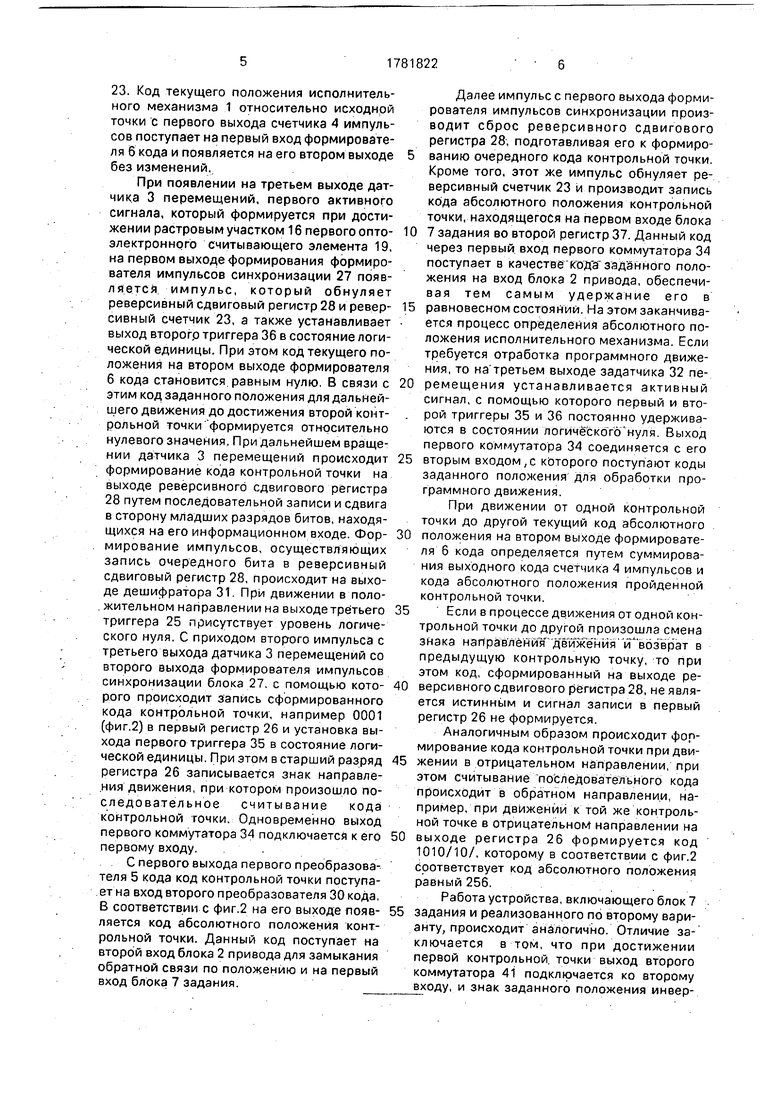
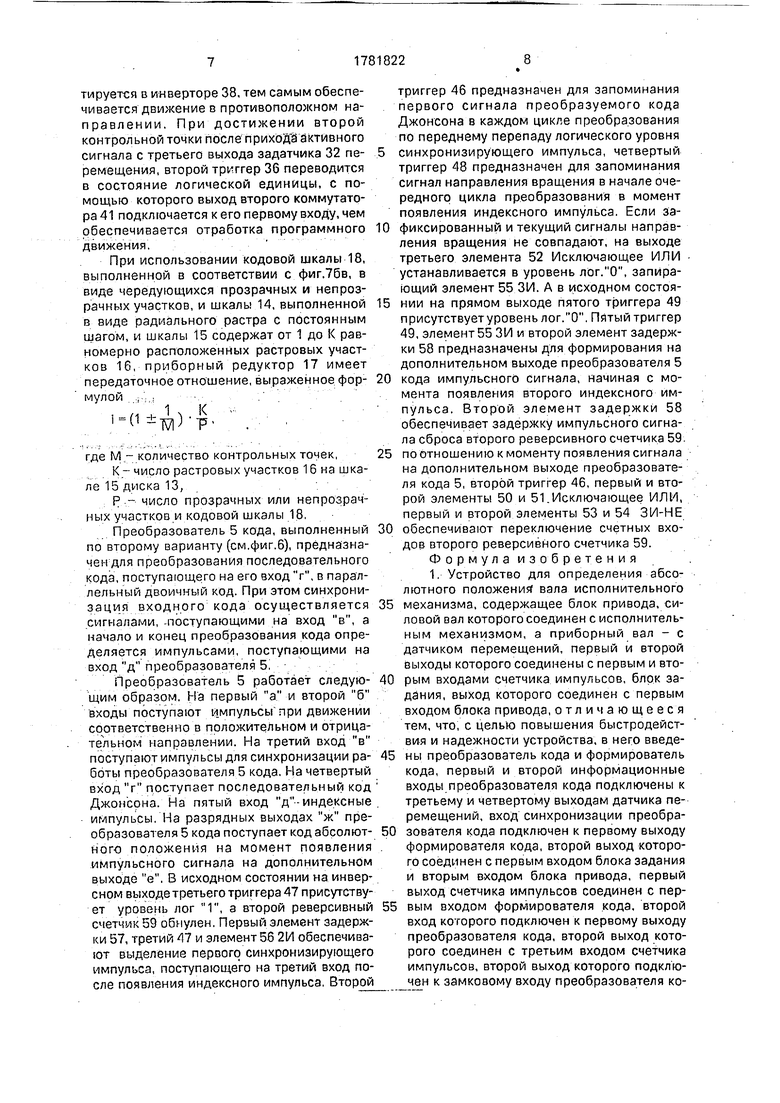
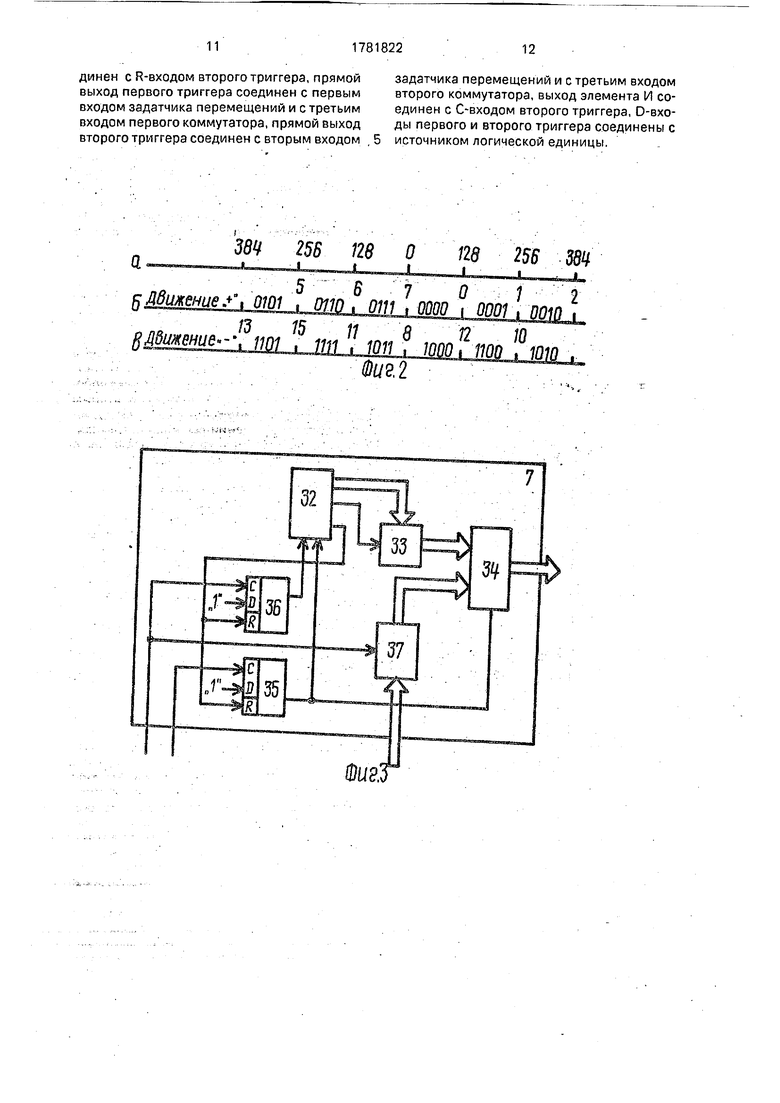
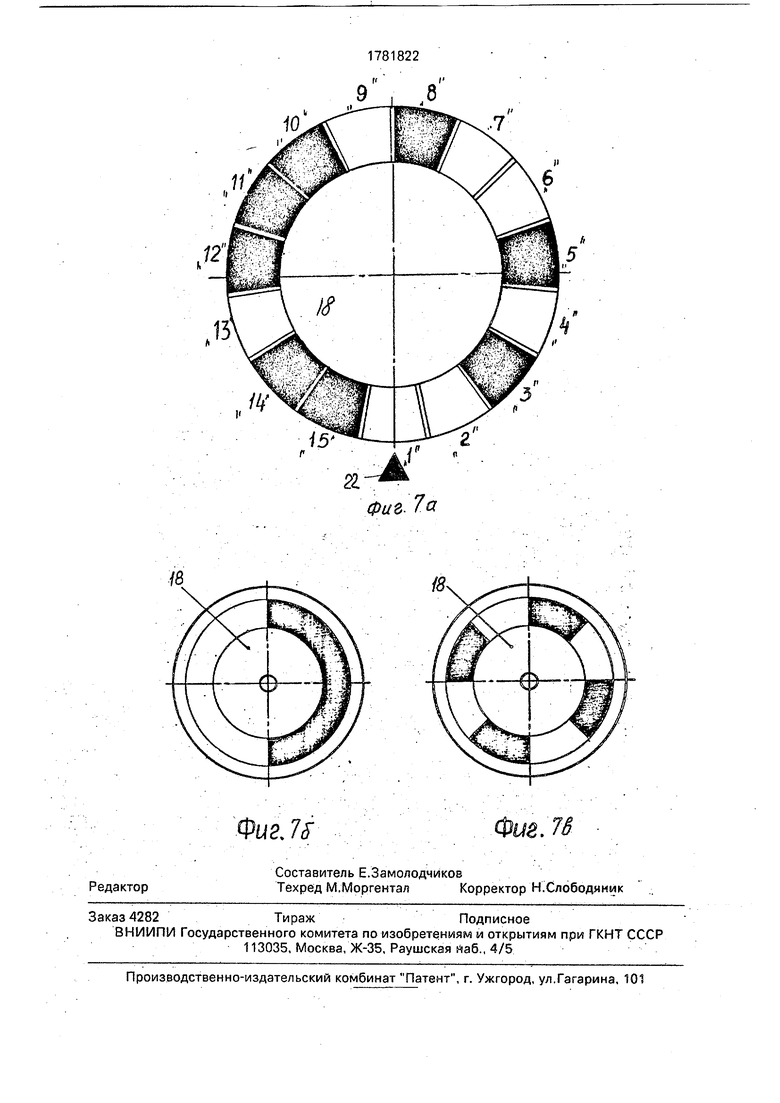
На фиг.1 дана структурная схема устройства для определения абсолютного положения вала исполнительного механизма; на фиг.2 - принцип формирования кодов контрольных точек; на фиг.З - функциональная схема первого варианта блока задания; на фиг.4 - функциональна схема второго варианта блока задания; на фиг.5 - функциональная схема логического блока; на фиг.6 - функциональная схема второго варианта преобразователя кода; на фиг.7а,б,в представлены варианты исполнения шкалы кодового диска.
Устройство для определения абсолютного положения вала исполнительного механизма содержит исполнительный механизм 1, блок 2 привода,датчик 3 перемещения, счетчик 4 импульсов, преобразователь 5 кода, формирователь б кода, блок 7 задания, силовой вал 8, приборный вал 9, блок 2 привода состоит из силовЪго редуктора 10, двигателя 11, блока 12 управления приводом. Датчик 3 перемещений содержит инкрементальный диск 13 со шкалами 14 и 15 и растровыми участками 16, приборный редуктор 17, кодовую шкалу 18 оптоэлект- ронные считывающие элементы 19, 20, 21, 22. Счетчик 4 содержит реверсивный счетчик 23, блок 24 определения направления, триггер 25, первый преобразователь 5 кода содержит регистр 26, формиров атёл ь йй- пульсов синхронизации 27, реверсивный сдвиговый регистр 28. Формирователь 6 кода содержит двоичный сумматор 29, второй преобразователь 30 кода, дешифратор 31. Блок 7 задания по первому варианту реализации содержит задатчик 32 перемещения, блок 33 умножения, первый коммутатор 34, триггер 35 и 36, регистр 37 Блок 7 задания по второму варианту реализации дополни11 v
тельно содержит инвертор 38, элемент 2И 39, элемент 2ИЛИ 40, коммутатор 41. Формирователь импульсов синхронизации 27 состоит из триггера 42, элемента 43 задержки, элемента 44 2И, формирователь 45 импульсов. Преобразователь 5 кода по второму варианту реализации содержит триггеры 46, 47, 48, 49, элементы Исключающее ИЛИ 50, 51, 52, элементы ЗИ НЕ 53,
54, элемент ЗИ 55, элементы 56, 57 задержки, реверсивный счетчик 58.
Устройство для определения абсолютного положения вала исполнительного механизма работает следующим образом,
В начальный момент времени реверсивный счетчик 23 счетчика 4, реверсивный сдвиговый регистр28 преобразователя 5 кода, триггер 42 формирователя импульсов синхронизации 27, регистр 26 преобразователя 5 кода обнулены. На втором выходе формирователя 6 кода код текущего положения равен нулю. На третьем выходе задат- чика 32 перемещения блока 7 задания, реализованного по первому варианту формируется сигнал начальной установки первого и второго триггеров 35 и 36, сигнал логического нуля с выхода первого триггера 35 подключает второй вход коммутатора 34 к его выходу. С первого выхода задатчика 32
перемещения поступает модуль кода заданной позиции, а со второго выхода - знак, соответствующий, например, положительному направлению. В результате на выходе блока 7 заданий формируется код заданного
положения относительно нулевого значения. Блок 2 привода обеспечивает отработку заданного положения и приводит в движение исполнительный механизм 1 и датчик 3 перемещений. На первом и втором
выходах датчика 3 перемещений появляются импульсы, которые снимаются вторым и третьим оптоэлектронными считывающими элементами 20 и 21 с первой шкалы 14 инкрементального диска 13. В результате обработки двух последовательностей импульсов в блоке 24 определения направления импульсы поступают с его выхода на суммирующий вход реверсивного счетчика
23. Код текущего положения исполнительного механизма 1 относительно исходной точки с первого выхода счетчика 4 импульсов поступает на первый вход формирователя 6 кода и появляется на его втором выходе без изменений.
При появлении на третьем выходе датчика 3 перемещений, первого активного сигнала, который формируется при достижении растровым участком 16 первого опто- электронного считывающего элемента 19, на первом выходе формирования формирователя импульсов синхронизации 27 появляется импульс, который обнуляет реверсивный сдвиговый регистр 28 и ревер- сивный счетчик 23, а также устанавливает выход второгр триггера 36 в состояние логической единицы. При этом код текущего положения на втором выходе формирователя 6 кода становится равным нулю. В связи с этим код заданного положения для дальнейшего движения до достижения второй конт- рольной точки формируется относительно нулевого значения. При дальнейшем вращении датчика 3 перемещений происходит формирование кода контрольной точки на выходе реверсивного сдвигового регистра 28 путем последовательной записи и сдвига в сторону младших разрядов битов, находящихся на его информационном входе. Фор- мирование импульсов, осуществляющих запись очередного бита в реверсивный сдвиговый регистр 28, происходит на выходе дешифратора 31 При движении в положительном направлении на выходе третьего триггера 25 присутствует уровень логического нуля. С приходом второго импульса с третьего выхода датчика 3 перемещений со второго выхода формирователя импульсов синхронизации блока 27. с помощью кото- рого происходит запись сформированного кода контрольной точки, например 0001 (фиг.2) в первый регистр 26 и установка выхода первого триггера 35 в состояние логической единицы. При этом в старший разряд регистра 26 записывается знак направления движения, при котором произошло последовательное считывание кода контрольной точки. Одновременно выход первого коммутатора 34 подключается к его первому входу.
С первого выхода первого преобразователя 5 кода код контрольной точки поступает на вход второго преобразователя 30 кода, В соответствии с фиг.2 на его выходе появ- ляется код абсолютного положения контрольной точки. Данный код поступает на второй вход блока 2 привода для замыкания обратной связи по положению и на первый вход блока 7 задания.
Далее импульс с первого выхода формирователя импульсов синхронизации производит сброс реверсивного сдвигового регистра 28, подготавливая его к формированию очередного кода контрольной точки. Кроме того, этот же импульс обнуляет реверсивный счетчик 23 и производит запись кода абсолютного положения контрольной точки, находящегося на первом входе блока 7 задания во второй регистр 37. Данный код через первый вход первого коммутатора 34 поступает в качестве кода заданного положения на вход блока 2 привода, обеспечивая тем самым удержание его в равновесном состоянии. На этом заканчивается процесс определения абсолютного положения исполнительного механизма. Если требуется отработка программного движения, то на третьем выходе задатчика 32 перемещения устанавливается активный сигнал, с помощью которого первый и второй триггеры 35 и 36 постоянно удерживаются в состоянии логического нуля Выход первого коммутатора 34 соединяется с его вторым входом,с которого поступают коды заданного положения для обработки программного движения.
При движении от одной контрольной точки до другой текущий код абсолютного положения на втором выходе формирователя 6 кода определяется путем суммирования выходного кода счетчика 4 импульсов и кода абсолютного положения пройденной контрольной точки.
Если в процессе движения от одной контрольной точки до другой произошла смена знака направления движения возврат в предыдущую контрольную точку, то при этом код, сформированный на выходе реверсивного сдвигового регистра 28, не является истинным и сигнал записи в первый регистр 26 не формируется.
Аналогичным образом происходит формирование кода контрольной точки при движении в отрицательном направлении, при этом считывание последовательного кода происходит в обратном направлении, например, при движении к той же контрольной точке в отрицательном направлении на выходе регистра 26 формируется код 1010/10/, которому в соответствии с фиг.2 соответствует код абсолютного положения равный 256.
Работа устройства, включающего блок 7 задания и реализованного по второму варианту, происходит аналогично. Отличие заключается в том, что при достижении первой контрольной точки выход второго коммутатора 41 подключается ко второму входу, и знак заданного положения инвертируется в инверторе 38, тем самым обеспечивается движение в противоположном на- правлении. При достижении второй контрольной точки после прихода активного сигнала с третьего выхода задатчика 32 перемещения, второй триггер 36 переводится в состояние логической единицы, с помощью которого выход второго коммутатора 41 подключается к его первому входу, чем обеспечивается отработка программного движения.
При использовании кодовой шкалы 18, выполненной в соответствии с фиг.Тбв, в виде чередующихся прозрачных и непрозрачных участков, и шкалы 14, выполненной в виде радиального растра с постоянным шагом, и шкалы 15 содержат от 1 до К равномерно расположенных растровых участков 16, приборный редуктор 17 имеет передаточное отношение, выраженное формулой ,
,м н- 1 V К |-(1 ±та) -ргде М - количество контрольных точек,
К - число растровых участков 16 на шкале 15 диска 13,
Р - число прозрачных или непрозрачных участков и кодовой шкалы 18,
Преобразователь 5 кода, выполненный по второму варианту (см.фиг.6), предназначен для преобразования последовательного кода, поступающего на его вход г, в параллельный двоичный код. При этом синхронизация входного кода осуществляется сигналами, поступающими на вход в, а начало и конец преобразования кода определяется импульсами, поступающими на вход д преобразователя 5,
Преобразователь 5 работает следующим образом. На первый а и второй б входы поступают импульсы при движении соответственно в положительном и отрицательном направлении. На третий вход в поступают импульсы для синхронизации работы преобразователя 5 кода. На четвертый вход г поступает последовательный код Джонсона. На пятый вход д -индексные импульсы. На разрядных выходах ж преобразован еля 5 кода поступает код абсолютного положения на момент появления импульсного сигнала на дополнительном выходе е. В исходном состоянии на инверсном выходе третьего триггера 47 присутствует уровень лог 1, а второй реверсивный счетчик 59 обнулен, Первый элемент задержки 57, третий 47 и элемент 56 2И обеспечивают выделение первого синхронизирующего импульса, поступающего на третий вход после появления индексного импульса, Второй
триггер 46 предназначен для запоминания первого сигнала преобразуемого кода Джонсона в каждом цикле преобразования по переднему перепаду логического уровня
синхронизирующего импульса, четвертый триггер 48 предназначен для запоминания сигнал направления вращения в начале очередного цикла преобразования в момент появления индексного импульса. Если за0 фиксированный и текущий сигналы направления вращения не совпадают, на выходе третьего элемента 52 Исключающее ИЛИ устанавливается в уровень лог.0, запирающий элемент 55 ЗИ. А в исходном состоя5 нии на прямом выходе пятого триггера 49 присутствует уровень лог.О. Пятый триггер 49, элемент 55 ЗИ и второй элемент задержки 58 предназначены для формирования на дополнительном выходе преобразователя 5
0 кода импульсного сигнала, начиная с момента появления второго индексного импульса. Второй элемент задержки 58 обеспечивает задержку импульсного сигнала сброса второго реверсивного счетчика 59
5 поотношению к моменту появления сигнала на дополнительном выходе преобразователя кода 5, второй триггер 46, первый и второй элементы 50 и 51.Исключающее ИЛИ, первый и второй элементы 53 и 54 ЗИ-НЕ
0 обеспечивают переключение счетных входов второго реверсивного счетчика 59. Формула изобретения 1, Устройство для определения абсолютного положения1 вала исполнительного
5 механизма, содержащее блок привода, силовой вал которого соединен с исполнительным механизмом, а приборный вал - с датчиком перемещений, первый и второй выходы которого соединены с первым и вто0 рым входами счетчика импульсов, блок задания, выход которого соединен с первым входом блока привода, отличающееся тем, что, с целью повышения быстродействия и надежности устройства, в него введе5 ны преобразователь кода и формирователь кода, первый и второй информационные входы преобразователя кода подключены к третьему и четвертому выходам датчика перемещений, вход синхронизации преобра0 зователя кода подключен к первому выходу формирователя кода, второй выход которого соединен с первым входом блока задания и вторым входом блока привода, первый выход счетчика импульсов соединен с пер5 вым входом формирователя кода, второй вход которого подключен к первому выходу преобразователя кода, второй выход которого соединен с третьим входом счетчика импульсов, второй выход которого подключен к замковому входу преобразователя кода, второй и третий выходы которого соединены с вторым и третьим входами блока задания соответственно.
2.Устройство поп.1,отличающее- с я тем, что датчик перемещений содержит инкрементальный диск с двумя шкалами, расположенный на приборном валу и кинематически связанный через редуктор с кодовым диском, первый, второй, третий и четвертый оптоэлектронные считывающие элементы, соединенные с одноименными выходами датчика перемещений, причем первая шкала инкрементального диска выполнена в виде измерительного растра с постоянным шагом, вторая шкала инкрементального диска содержит К индексных меток, где К- целое натуральное число, шкала кодового диска выполнена в виде череду- ющихся прозрачных и непрозрачных участков, а редуктор выполнен с передаточным отношением
1 (1±)-Ј,
где М - количество контрольных точек;
Р - число прозрачных участков шкалы кодового диска.
3.Устройство поп.1,отличающее- с я тем, что преобразователь кода содержит регистр, формирователь импульсов синхронизации и реверсивный сдвиговый регистр, при этом первый и второй входы формирователя импульсов синхронизации являются первым информационным и знаковым входами преобразователя кода, соответственно, вторым информационным входом которого является информационный вход реверсивного сдвигового регистра, входом синхронизации преобразователя кода является вход записи реверсивного сдвигового регистра, выход которого соединен с информационным входом регистра, выход которого является первым выходом преобразователя кода, первый выход формирователя импульсов синхронизации соединен с входом сброса реверсивного сдвигового регистра и является вторым выходом преобразователя кода, второй выход формирователя импульсов синхронизации соединен с входом записи регистра и является третьим выходом преобразователя кода, знаковый вход которого подключен к входу заданий режима реверсивного сдвигового регистра и к знаковому входу регистра.
4.Устройство поп.1,отличающее- с я тем, что формирователь кода содержит двоичный сумматор, преобразователь кода и дешифратор, первым входом формирователя кода является первый вход двоичного
сумматора, который соединен с входом дешифратора, вторым входом формирователя кода является вход преобразователя кода, выход которого соединен с вторым входом двоичного сумматора, выход которого является вторым выходом формирователя кода, первым выходом которого является выход дешифратора.
5.Устройство поп.1,отличающее- 0 с я тем, что блок задания содержит задатчик
перемещения, блок умножения, первый и второй триггеры, коммутатор и регистр, первым входом блока задания является информационный вход регистра, выход которого
5 соединен с первым входом коммутатора, выход которого является выходом блока задания, вторым и третьим входами блока задания являются соответственно С-входы второго и первого триггеров, С-вход второго
0 триггера соединен с входом записи регистра, первый и второй выходы задатчика перемещений соединены с первым и вторым входами блока умножения, третий выход задатчика перемещений соединен с R-входа5 ми триггера, выходы которых соединены с первым и вторым входами задатчика перемещений соответственно, выход блока умножения соединен с вторым входом коммутатора, третий вход которого соеди0 нен с выходом первого триггера, D-входы первого и второго триггеров соединены с источником логической единицы.
6.Устройство поп.1,отличающее- с я тем, что блок задания содержит задатчик
5 перемещения, блок умножения, первый и второй триггеры, первый и второй коммутаторы, регистр, элемент И, элемент ИЛИ, инвертор, первым входом блока задания является информационный вход регистра,
0 выход которого соединен с первым входом первого коммутатора, первый выход задатчика перемещений соединен с первым входом блока умножения, второй выход задатчика перемещений соединен с первым
5 входом второго коммутатора непосредственно и с вторым входом - через инвертор, выход второго коммутатора соединен с вторым входом блока умножения, выход которого соединен с вторым входом первого
0 коммутатора, выход которого является выходом блока задания, вторым входом которого является вход записи регистра, который подключен к первому входу элемента И, второй вход которого подключен к,
5 инверсному выходу первого триггера, третьим входом блока задания является первый вход элемента ИЛИ, который подключен к С-входу первого триггера, третий выход задатчика перемещений соединены с вторым входом элемента ИЛИ, выход которого соединен с R-входом второго триггера, прямой выход первого триггера соединен с первым входом задатчика перемещений и с третьим входом первого коммутатора, прямой выход второго триггера соединен с вторым входом
задатчика перемещений и с третьим входом второго коммутатора, выход элемента И соединен с С-входом второго триггера, D-вхо- ды первого и второго триггера соединены с источником логической единицы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного счета изделий | 1983 |
|
SU1113824A1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| Многооборотный преобразователь угол - код | 1990 |
|
SU1711329A1 |
| Устройство автоматизированной подготовки программ для станков с ЧПУ | 1986 |
|
SU1354160A1 |
| Устройство для регулирования расхода | 1986 |
|
SU1377832A1 |
| Устройство для коррекции ошибок внешней памяти | 1987 |
|
SU1501173A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
| Устройство для управления фотоколориметрическим газоанализатором | 1982 |
|
SU1092468A1 |
| Электропривод | 1987 |
|
SU1476584A1 |
| Устройство для коррекции шкалы времени | 1990 |
|
SU1709268A1 |

Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах автоматического управления и контроля в качестве преобразователя угла поворота вала в код. Цель изобретения - повышение быстродействия и надежности преобразования угла поворота вала в код. Устройство содержит исполнительный механизм 1, блок 2 привода, датчик 3 перемещения, счетчик 4 импульсов, преобразователь 5 кода, формирователь 6 кода, блок 7 задания, силовой 8 и приборный 9 валы. Поставленная цель достигается тем, что в известное устройство введены преоб-. разователь и формирователь кодов, а в датчик перемещения дополнительно введен кодовый диск. Вновь введенные элементы и связи между ними позволили производить отсчет текущего значения абсолютного положения от контрольных точек с заранее
Ш 256 Ш 0 128 256 Ш
Q .„.„,...„,..„, , Р, ,„I -in . t.,1.,1III-., и ... . tin ,,,.4 -J-им., J...
В 7017
t 0000 i 0001 i OOfpj.. fi 15 11 в П Ю
; ij LjLjM i,jgifLijggg« 1100 r.
toe 2
Физ.В
/4
6
Фие. 7а
| Фотоэлектрический преобразователь угловых перемещений в код | 1974 |
|
SU506892A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
