Изобретение относится к способам радиолокационного наблюдения за местностью в целях обнаружения на фоне земной (водной) поверхности малоразмерных объектов, их распознавания и определения с высокой точностью местоположения этих объектов относительно наблюдаемого изображения (РЛИ) этой местности.
Такая задача возникает, например, при доставке грузов с помощью летательных аппаратов (ЛА) в заданную зону и их десантировании (спуске) с высокой точностью в выявленную по РЛИ (или по другому изображению) точку наблюдаемой местности. Это проводится, например, при оказании помощи пострадавшим от бедствия с использованием парапланов, управляемых с ЛА (см. «Способ точного десантирования грузов» Шумилова М.В., www.sciteclibrary.ru/rus/catalog/pages/3106,html), при тушении очага возгорания (Автоматизированная система доставки грузов к местам тушения пожаров: Техническое описание и инструкция по эксплуатации №2104-91, ГосНИИАС, 1991.) и в других случаях управляемого спуска грузов (см., например, патент РФ 2078368 от 26.02.1993 «Система управления парапланом»).
В приведенных примерах на ЛА решают две задачи: вначале - обнаруживают и распознают требуемый объект и определяют его местоположение, а затем - выводят параплан или другую систему спуска груза в точку местности, определяемую обнаруженным объектом. При этом решение обеих задач желательно осуществлять в одной и той же системе координат, что позволит устранить дополнительные погрешности, обусловленные как техническими средствами привязки разных систем координат, так и ошибками пересчета.
Как правило, начальное обнаружение объекта осуществляют в системе координат, связанной с ЛА. При обнаружении объекта на местности обычно используют РЛИ или другое изображение, получаемое на ЛА и отражаемое на экране системы лоцирования, т.е. применяют экранную систему координат.
В способе управления парапланом, изложенном в упомянутом ранее сайте Шумилова М.В., обнаружение и распознавание объекта проводят по телевизионному изображению, а определение местоположения выявленного объекта на местности осуществляют в системе координат, связанной с этим телевизионным изображением. В указанной ранее автоматизированной системе доставки грузов к месту тушения пожаров, разработки ГосНИИАС, при проведении указанных действий использовался тепловизор, а в соответствии с патентом 2078368 обнаружение, распознавание и привязку объекта к местности осуществлял сам оператор, наблюдая за парапланом и управляя его полетом с помощью передаваемых по радио команд. Эти способы являются аналогами предлагаемого способа.
Основным недостатком указанных аналогов является сильная зависимость эффективности их работы от метеоусловий. Обнаружение и распознавание объектов происходит только в хороших погодных условиях и при существенных ограничениях по дальности.
Практически не зависят от погодных условий и обеспечивают существенное увеличение дальности радиолокационные системы. Однако обнаружение, распознавание объектов, особенно малоразмерных с малой эффективной площадью рассеивания (ЭПР), определение их местоположения с высокой точностью требует локационных систем с высоким разрешением. Необходим переход к системам радиовидения, основанным на широкополосных зондирующих сигналах и на синтезированных антеннах-решетках (CAP). Но создание и практическое применение радиолокаторов с синтезированной апертурой (РСА) с нужными характеристиками и формирующими РЛИ в реальном времени сопряжено с определенными трудностями, так как такие системы оказываются сложными, требуют существенных вычислительных средств и, как правило, участия в работе специального оператора. Поэтому в настоящее время такие РСА находят ограниченное применение, например, при решении таких задач, как мониторинг земной (водной) поверхности, с применением специальных ЛА.
Вместе с тем широкое применение находят достаточно простые РСА с относительно невысокими характеристиками. Часто они сопрягаются с системами экстремального регулирования (см., например, И.Н.Белоглазов, В.П.Тарасенко «Корреляционно-экстремальные системы», изд-во «Сов. Радио», М., 1974). Например, в системах навигации для привязки положения ЛА к пролетаемой местности используют ранее полученное опорное РЛИ этого участка и текущее РЛИ, формируемое на ЛА с помощью РСА во время полета. Точная привязка может быть обеспечена при использовании корреляционно-экстремального способа (КЭС). При этом способе, последовательно выполняя операции вычисления функции сходства двух изображений и операции поиска экстремума этой функции (см., например, В.А.Андросов, Ю.В.Бойко, Ю.В., Бочкарев A.M., Однорог А.П. «Совмещение изображений в условиях неопределенности» в журнале «Зарубежная радиоэлектроника», 1985 г. №4, стр.54), достигают совмещения опорного РЛИ с текущим и тем самым определяют местоположение ЛА относительно данной местности и, при необходимости, географические координата ЛА. В качестве функции сходства часто используется взаимная корреляционная функция этих изображений. Этот способ определения местоположения также является аналогом предлагаемого способа.
Наиболее близким аналогом - прототипом предлагаемого способа - является способ определения местоположения объекта на местности (см., например, Г.С.Кондратенков, А.Ю.Фролов «Радиовидение», изд-во «Радиотехника», Москва, 2005), при котором с ЛА с помощью РСА лоцируют местность и формируют ее РЛИ, затем обнаруживают объекты (см., например, раздел 7.3 указанной книги), проводят их распознавание (см., там же раздел 7.4) и осуществляют привязку объектов к РЛИ, например, за счет привязки к ориентирам на местности (см. раздел 7.5 той же книги, стр.278).
Но, как уже отмечалось ранее, такой способ выявления объекта и определения его положения на местности для ЛА, обеспечивающего доставку и спуск груза при работе по малоразмерным объектам, в настоящее время трудно реализуем, так как РСА с необходимыми для этого характеристиками достаточно сложны, дороги и, как правило, требуют для своей работы специального оператора.
Задачей предлагаемого изобретения является разработка способа, обеспечивающего всепогодное обнаружение и распознавание на местности малоразмерного объекта, определение с высокой точностью его положения с использованием обзорных РЛИ этой местности, формируемых относительно простыми РСА, установленными на ЛА доставки и десантирования грузов. Обзорные РЛИ этих РСА значительно уступают по своим параметрам детальным РЛИ, необходимым для обнаружения и распознавания указанных объектов и для определения их положения с высокой точностью. Для достижения требуемого результата предлагается дополнительно использовать специальные ЛА, оснащенные РСА с требуемыми характеристиками и осуществляющие, например, мониторинг поверхности с высоким разрешением.
Сущность изобретения состоит в том, что в способе определения местоположения объекта, включающем лоцирование подстилающей поверхности, например с помощью установленного на ЛА РСА, и формирование РЛИ этой поверхности, с последующим обнаружением, распознаванием и определением положения искомого объекта в экранной системе координат, связанной с полученным РЛИ, на ЛА используют РСА с разрешением, обеспечивающим формирование только обзорного РЛИ, но дополнительно с помощью установленной, например, на ЛА системы мониторинга (ЛА СМ) РСА с высоким разрешением, достаточным для обнаружения и распознавания искомого объекта и для определения с требуемой точностью его координат, проводят лоцирование соответствующего участка подстилающей поверхности и формируют два дополнительных РЛИ этого участка: первое - обзорное с разрешением, согласованным с разрешением РСА ЛА, и второе - детальное с высоким разрешением, после чего по второму дополнительному РЛИ производят процедуры обнаружения и распознавания искомого объекта, а также определяют точное положение этого объекта в координатах, жестко связанных с экранной системой координат РЛИ ЛА СМ, а затем фиксируют полученные координаты объекта на первом дополнительном РЛИ, которое привязывают к РЛИ ЛА, тем самым определяя положение искомого объекта в экранной системе координат ЛА.
При этом для увеличения точности привязки друг к другу обзорных РЛИ, полученных на ЛА и ЛА СМ, их совмещение осуществляют корреляционно-экстремальным способом (КЭС).
Кроме того, для улучшения точности привязки друг к другу обзорных РЛИ траектории полета ЛА и ЛА СМ выбирают исходя из максимального сближения ракурсов формирования РЛИ на 2-х ЛА.
Одновременно, в целях уменьшения ошибок КЭС при совмещении двух РЛИ, шаг вычисления обзорного РЛИ ЛА СМ по каждой оси согласовывают с соответствующим шагом вычисления обзорного РЛИ на ЛА, формируя при этом две или более версии дополнительного обзорного РЛИ, отличающиеся друг от друга сдвигом по каждой оси на величину, кратную шагу детального РЛИ и определяемую числом версий дополнительного обзорного РЛИ ЛА СМ, а взаимную привязку обзорных РЛИ двух ЛА с помощью КЭС осуществляют с использованием всех версий дополнительного обзорного РЛИ ЛА СМ.
При этом лоцирование местности с помощью РСА ЛА СМ может проводиться одновременно с полетом ЛА, осуществляющего доставку и спуск груза, или предшествовать ему. Важно, чтобы за время задержки в лоцировании двумя ЛА не произошло существенного, с точки зрения системы доставки и спуска груза, изменения положения искомого объекта.
Возможность осуществления изобретения подтверждается наличием современных средств космической и авиационной разведки с высоким линейным разрешением и по дальности, и по азимуту. Например, беспилотный летательный аппарат-разведчик «Предейтор» оснащен РСА Lynx, обеспечивающим разрешение до 0.1 м. Вместе с тем имеется возможность за счет изменения обработки информации, получаемой при лоцировании, формировать обзорные РЛИ с разрешением значительно ниже, чем позволяют получить характеристики лоцирования. Важно, что при этом возможно одновременное формирование и детальных РЛИ с максимально возможным разрешением. Загрубление разрешения обзорных РЛИ по дальности при использовании цифровой обработки сигналов может осуществляться, например, путем введения предварительного суммирования (группирования) выборок сигнала после его оцифровки на выходе приемника РСА. Уменьшение линейного разрешения «по азимуту» можно осуществить, например, за счет уменьшения синтезированной апертуры или путем суммирования выборок соседних зондирований (на одной дальности) по аналогии с обработкой по дальности (см., например, раздел «Некогерентное накопление» стр.156 уже приводимой ранее книги Г.С.Кондратенкова и А.Ю.Фролова «Радиовидение»). Меняя при суммировании число выборок, можно изменять разрешение и по дальности, и по азимуту.
Необходимо отметить, что, так как детальное и обзорное РЛИ, формируемые на ЛА СМ, получаются из одних и тех же сигналов, привязку этих РЛИ к друг к другу можно считать абсолютно точной.
Возможность достижения поставленной задачи при применении предлагаемого способа связана с возможностью точной привязки 2-х РЛИ разных ЛА: обзорного РЛИ ЛА СМ и РЛИ ЛА доставки и спуска груза. Эта точность должна соответствовать разрешению детального РЛИ ЛА СМ. Достижимость такой привязки 2-х РЛИ подтверждается литературными источниками. Так в работе А.С.Василейского «Программно-алгоритмическое обеспечение прецизионного совмещения данных ДЗЗ, получаемых разными съемочными системами, в разных спектральных зонах и в разное время» (см. сайт http://arc.iki.rssi.ru/earth/trudi/2-04.pdf, где ДЗЗ-дистанционное зондирование земли) показано, что достижимая точность совмещения может составлять (5...10)% от величины пикселя (шага вычисления) изображений. Это означает, что для сохранения требуемой точности привязки разрешение обзорного РЛИ может быть на порядок хуже разрешения детального РЛИ, что и наблюдается на практике.
Перечень чертежей.
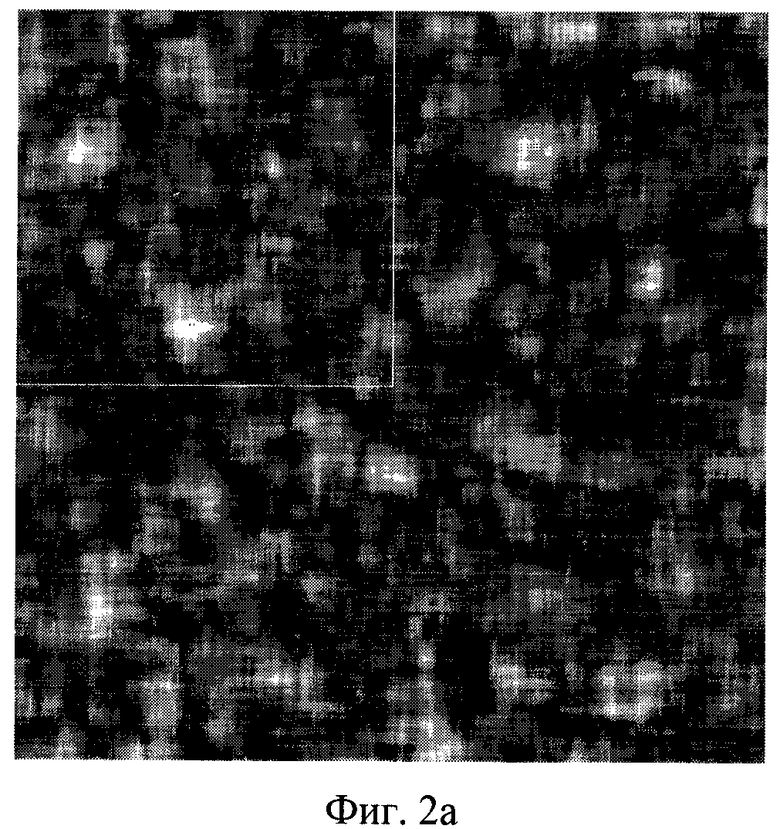
На фиг.1 приведено детальное РЛИ с корреляцией k=6.
На фиг.2б приведено грубое (обзорное) РЛИ размером 50×50 выборок, полученное из участка (выделенного квадратом) детального РЛИ, размером 250×250 выборок (фиг.2а).
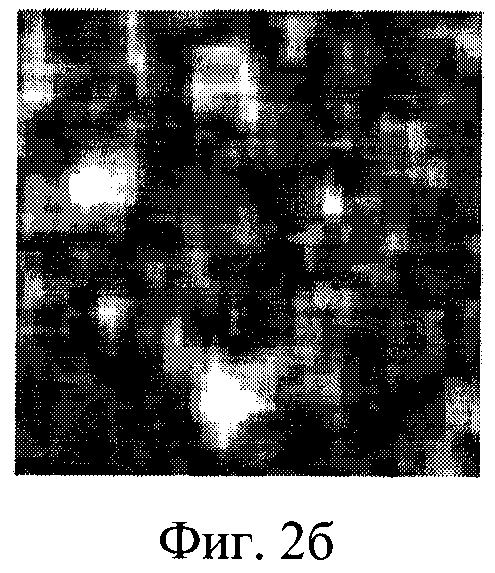
На фиг.3 приведен график функции сходства двух изображений - разности (среднеквадратического отклонения) выборок 2-х обзорных РЛИ - в зависимости от их смещения относительно друг друга по двум осям.
Для анализа точности совмещения двух обзорных РЛИ было проведено также численное моделирование. Для этого рассматривалось РЛИ для случайной статистически однородной поверхности. При этом РЛИ представлялось дискретными выборками комплексных случайных величин, корреляция по двум осям которых вводилась за счет суммирования в скользящем окне k независимых выборок по каждой оси:
где IMNi,j=crand-выборки, имитируемые как случайные независимые величины, имеющие нормальное распределение и нулевое среднее. На фиг.1 приведено получаемое при этом исходное для моделирование детальное РЛИ при k=6.
Для создания грубого (обзорного) изображения IMSa проводилось загрубление разрешения за счет суммирования выборок исходного РЛИ по квадратам s*s.

На фиг.2б приведено грубое (обзорное) РЛИ, получаемое из исходного при s*s=25.
Рассмотрен вариант сопоставления грубых изображений при условии их относительного сдвига между собой: второе изображение относительно первого сдвинуто на i0 дискретов исходного детального РЛИ (фиг.2а) по горизонтали и j0 по вертикали:

Функция сходства 2-х РЛИ - разность между изображениями - определяется по формуле:

Результаты расчета указанной разности в зависимости от i0 (no горизонтали) и j0 (по вертикали) приведены на фиг.3.
Оценка взаимного смещения 2-х РЛИ проводилась в два этапа. Предварительная оценка соответствовала такому взаимоположению двух грубых изображений, при котором в области перекрытия их разность являлось минимальной, т.е. оценка проводилась с точностью до шага вычисления обзорных РЛИ. При этом для корректности результата площадь перекрытия при всех сдвигах одного РЛИ относительно другого не изменялась для всех случаев сравнения.
При этом существует четко различимая точка минимума, по координатам которой можно определить смещение двух обзорных РЛИ относительно друг друга с точностью до шага загрубления s. Далее по значениям соседних разностей в области ее минимума путем линейной аппроксимации смещение определяется более точно.
Проведены статистические испытания модели, и найден модуль среднеквадратического отклонения. Проводилось 100 испытаний, при этом в каждом испытании сдвиг выбирался случайным с равновероятным распределением на интервале [-50,50]. Точное исходное изображение составляло поверхность 500 на 500 значений с заданной корреляцией, грубое изображение - 50 на 50 точек. Результаты моделирования в виде суммарной ошибки совмещения 2-х РЛИ по двум осям приведены в таблице. Расстояние между выборками детального РЛИ полагалось равным 1 м.
Как видно из таблицы, ошибка не превышает 20%, что показывает возможность совмещения двух обзорных изображений с точностью, сопоставимой с шагом вычисления детального (точного) изображения.
В общем случае, точность привязки зависит от многих факторов и, в частности, от соответствия ракурса наблюдения требуемого участка местности с 2-х ЛА. Наилучшее совмещение достигается при совпадении ракурсов.
В зависимости от вида лоцируемой поверхности точность и даже сама возможность привязки двух обзорных РЛИ может существенно меняться при изменении шага вычисления РЛИ. Для случайной статистически однородной поверхности важно соотношение интервала корреляции k и шага загрубления s. Шаг вычисления обзорного РЛИ не должен превышать интервал корреляции. При сопоставимости этих величин существенное значение имеют смещения i0 и j0 вычисляемых выборок двух РЛИ. Для уменьшения влияния в этом случае шага вычисления s и величин смещения i0 и j0 важно, во-первых, чтобы шаг вычисления дополнительного обзорного РЛИ ЛА СМ соответствовал шагу вычисления РЛИ ЛА, а во-вторых, желательно формирование нескольких версий обзорного РЛИ, отличающихся между собой сдвигом по двум осям при сохранении шага их вычисления.
При формировании двух версий дополнительного обзорного РЛИ этот сдвиг должен составлять s/2. В общем случае, при числе версий N сдвиг каждой версии относительно соседней может определяться, например, как s/N.
Наличие нескольких версий дополнительного обзорного РЛИ ЛА СМ позволяет провести более точную привязку этого РЛИ к РЛИ ЛА. Это достигается тем, что при определении этой привязки с помощью, например, КЭС для КЭС применяют все названные версии РЛИ ЛА МС. При этом уменьшается ошибка предварительной оценки взаимоположения двух грубых изображений, так как оценка производится по версии, для которой достигается минимальная разность (4) уже с точностью до s/N. Это, в свою очередь, приводит к уменьшению ошибки и на втором этапе, на котором привязка определяется по значениям соседних разностей (4) в области ее минимума путем, например, линейной аппроксимации разности между двумя РЛИ при двух (или более) смещениях.
Практическая реализация предлагаемого способа достигается уже при имеющемся состоянии техники. В качестве ЛА СМ может быть использован, например, ЛА типа U-2S с РСА ASARS-2 (см. стр.365 приводимой уже ранее книги Г.С.Кондратенкова и А.Ю.Фролова «Радиовидение»). Разрешение этого РСА лежит в пределах 1...18 м, что позволяет формировать как детальное РЛИ с разрешением 1 м, чтобы обеспечить обнаружение малоразмерных объектов и их привязку к РЛИ местности с точностью, даже превышающей минимальное значение из указанного диапазона разрешения, так и дополнительное обзорное РЛИ с разрешением, например, 10 м. В качестве ЛА, обеспечивающих доставку и сброс (десантирование) груза, могут использоваться самолеты и вертолеты с установкой на них, например, таких РЛС, как «Копье». Так, по данным НИИ экономики авиационной промышленности (см. сайт http://www.avias.com/news/2004/10/20/84687.html со ссылкой на газету "Воздушный транспорт" N39-40, октябрь 2004 г) «высокие технические характеристики БРЛС "Копье-А"... позволяют использовать ее для широкого круга вертолетов, в том числе для обеспечения поисково-спасательных работ, вести в заданном секторе картографирование береговой зоны с разрешением до 10 метров...».
В данном случае на ЛА СМ типа U-2S возможно формирование дополнительного детального РЛИ с разрешением порядка 1 м. Это РЛИ позволяет обнаружить искомый малоразмерный объект и провести его распознавание и точную привязку к местности. Одновременно формируется дополнительное обзорное РЛИ с отметкой положения на нем обнаруженного объекта и осуществляется передача этого РЛИ на вертолет, на котором имеется РЛИ, сформированное по данным БРЛС «Копье-А». Дополнительное обзорное РЛИ на ЛА СМ рассчитывается с шагом, соответствующим шагу формирования РЛИ в БРЛС «Копье-А». На вертолете осуществляется совмещение двух РЛИ, например, с использованием КЭС, и это позволяет иметь на вертолете точную информацию об объекте без непосредственного его наблюдения и выделения в БРЛС «Копье» (в силу малого разрешения и других свойств этой БРЛС).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСКОМОГО ОБЪЕКТА | 2008 |
|
RU2392635C2 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ОБЪЕКТА | 2015 |
|
RU2596610C1 |
| Способ поиска и обнаружения объекта | 2017 |
|
RU2648234C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| СПОСОБ НАВИГАЦИИ, ПОСАДКИ И ВЗЛЕТА ВЕРТОЛЕТА | 2014 |
|
RU2578202C1 |
| Способ оценки радиальной скорости объекта | 2018 |
|
RU2696084C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРА СКОРОСТИ ЛОКАЛЬНЫХ ОТРАЖАТЕЛЕЙ В КОСМИЧЕСКОМ РСА | 2017 |
|
RU2668570C1 |
| СПОСОБ ОБРАБОТКИ СВЕРХШИРОКОПОЛОСНЫХ СИГНАЛОВ | 2016 |
|
RU2624005C1 |
| СПОСОБ РАСПОЗНАВАНИЯ И ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБРАЗА ОБЪЕКТА НА РАДИОЛОКАЦИОННОМ ИЗОБРАЖЕНИИ | 2012 |
|
RU2516000C2 |
| СПОСОБ ИМИТАЦИИ НАЗЕМНОГО ОБЪЕКТА ПРИ РАДИОЛОКАЦИОННОМ НАБЛЮДЕНИИ | 2006 |
|
RU2310884C1 |

Изобретение относится к способам радиолокационного наблюдения за местностью в целях обнаружения малоразмерных объектов, их распознавания и определения с высокой точностью местоположения этих объектов относительно наблюдаемого изображения (РЛИ) этой местности. Сущность изобретения состоит в том, что в способе определения местоположения объекта, включающем лоцирование и формирование РЛИ поверхности с помощью установленного на летательном аппарате (ЛА) радиолокатора с синтезированной апертурой (РСА), обнаружение, распознавание и определение положения объекта в системе координат, связанной с полученным РЛИ, на ЛА используют РСА с разрешением, обеспечивающим формирование только обзорного РЛИ. Кроме того, с помощью установленной, например, на ЛА системы мониторинга (ЛА СМ) РСА с высоким разрешением проводят лоцирование соответствующего участка подстилающей поверхности и формируют два дополнительных РЛИ этого участка: первое - обзорное с разрешением, согласованным с разрешением РСА ЛА, и второе - детальное с высоким разрешением. По второму дополнительному РЛИ обнаруживают, распознают искомый объект и определяют его точное положение, фиксируют полученные координаты объекта на первом дополнительном РЛИ, которое привязывают к РЛИ ЛА, тем самым определяя положение искомого объекта в системе координат ЛА. Для увеличения точности привязки друг к другу обзорных 2-х РЛИ их совмещение осуществляют корреляционно-экстремальным способом (КЭС), согласовывают траектории полета 2-х ЛА и шаг вычисления обзорных РЛИ, формируют несколько версий дополнительного обзорного РЛИ. Достигаемым техническим результатом является обеспечение всепогодного обнаружения и распознавания на местности малоразмерного объекта, определение его положения с высокой точностью при применении ЛА с относительно простыми РСА и специальных ЛА СМ, оснащенных РСА с требуемыми характеристиками, возможность привязки 2-х обзорных РЛИ разных ЛА с точностью, соответствующей разрешению детального РЛИ ЛА СМ. 4 з.п. ф-лы, 4 ил., 1 табл.
| СИСТЕМА УПРАВЛЕНИЯ ПАРАПЛАНОМ | 1993 |
|
RU2078368C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ПОЛЯРИЗАЦИОННОГО ПОРТРЕТА ЗЕМНОЙ ИЛИ МОРСКОЙ ПОВЕРХНОСТИ В ДВУХЧАСТОТНОЙ ЦИФРОВОЙ РСА | 1999 |
|
RU2166774C2 |
| WO 2004113950 A1, 29.12.2004 | |||
| US 6166677 А, 26.12.2000 | |||
| Объемная логическая игрушка | 1982 |
|
SU1057045A1 |

