Настоящее изобретение относится к устройству ориентации типа «двухосной» головки ориентации, в частности к головке ориентации с большими углами, обладающей исключительной способностью ориентации и быстродействия, что позволяет применять ее для разных функций оптроники, требующих большое угловое покрытие, высокую точность и быстродействие наводки, небольшие размеры и малую массу.
Известны устройства ориентации типа так называемой «двухосной» головки для ориентации, по меньшей мере, одного блока для передачи, по меньшей мере, одного светового и/или электромагнитного пучка для угла места цели и/или для азимута путем вращения передающего блока вокруг соответственно оси угла места цели и/или оси азимута.
В этих известных головках передающий блок, например оптический блок с зеркалами или призмами для приема падающего светового пучка, отклоняемого для получения переданного пучка, установлен на вилке с возможностью поворота вокруг первой оси, так называемой оси угла места цели, и приводится во вращение вокруг указанной оси угла места цели посредством первого двигателя, установленного на указанной вилке, причем эта вилка расположена на опорном основании с возможностью вращения вокруг второй оси, так называемой оси азимута, перпендикулярной оси угла места цели, и может приводиться во вращение вокруг оси азимута вторым двигателем, установленным на той же опорной поверхности, которая может оборудоваться на платформе, являющейся наземной и неподвижной или подвижной и устанавливаемой на наземном транспортном средстве, судне или летательном аппарате.
В существующих устройствах ориентации этого типа оба двигателя представляют собой ротационные электродвигатели, т.е. обычные электромагнитные двигатели, которые могут быть сдвоенными или шаговыми.
Для получения повышенных вращающих моментов, обеспечивающих угловые ускорения и/или угловые скорости, достаточные для достижения времени приведения головки ориентации в заданный сектор пространства, и соответствующих разным намеченным оптико-электронным функциям, эти двигатели имеют значительные размеры и массу, чем вызвана большая инерционность головки, отрицательно сказывающаяся на требуемых параметрах. Поэтому для увеличения вращающего момента при сохранении массы и размеров электрических двигателей в разумных пределах приведение в действие подвижных частей для угла места цели или для азимута обеспечивается электрическими двигателями с применением приводов с механическими редукторами. Однако применение механических редукторов для механизированного привода головок ориентации, применяемых в настоящее время, влечет за собой, в свою очередь, недостатки, выражающиеся в затратах, использовании сухого трения, средств для устранения люфтов и следящей системы для восполнения недостатков, т.е. для гарантии по возможности точного позиционирования пучка, в частности светового, испускаемого головкой ориентации.
Применяемые сдвоенные двигатели хотя и позволяют отказаться от редукторов и люфта, зато они не обладают соотношением «вращающий момент/масса», обеспечивающим снижение объема и массы, требуемое для применения головки ориентации со сдвоенным двигателем на платформах малого размера (летательные аппараты или наземные транспортные средства) вследствие естественной легкости встраивания такой головки.
В том случае, когда электрическими двигателями существующих головок ориентации служат шаговые двигатели, то их основной недостаток состоит в том, что элементарный шаг этих двигателей не является достаточно малым, что предопределяет отсутствие точности при ориентации головок.
Таким образом, применение электромагнитных двигателей сопряжено с массой, объемом, расходом энергии и затратами, которые целесообразно было бы уменьшить, причем эти параметры имеют существенное значение для систем, применяемых в летательных аппаратах или наземных транспортных средствах, в которых ограничено наличие свободного места.
Следовательно, существующие устройства ориентации такого типа, основанные на использовании традиционных технологий, не позволяют достигнуть требуемые, упомянутые выше параметры, а именно большое угловое покрытие с высокой точностью и быстродействием наводки при одновременно малых размерах, массы и стоимости, предпочтительно дополненных существенно упрощенной конструкцией, в связи с чем, в частности, обычные технологии оснащения приводами не позволяют получать необходимое соотношение «вращающий момент/масса», которое возможно разве что за счет показателей массы и объема, которые не позволяют использовать в ориентируемой головке устройство для целей и назначения, предусмотренных настоящим изобретением. Действительно, в таких головках ориентации оптико-механическое выполнение должно характеризоваться компактностью и центрированием, содействующими уравновешенности и общей компактности устройства ориентации согласно настоящему изобретению.
Следовательно, особо важной целью изобретения является создание головки для ориентации, в частности, лазерного луча при возможно коротком времени приведения в любой сектор пространства, расположенного, по меньшей мере, в полусфере (пространство, превышающее 2π стерадиана), в частности, при времени приведения оптической линии визирования на 90° менее чем за 100 мс, предпочтительно менее чем за 50 мс.
Другой целью изобретения является создание головки ориентации описанного выше типа, обеспечивающей по возможности максимально точную ориентацию и смещение двигателя по возможности с максимально малым элементарным шагом, составляющим, например, около одного микрорадиана.
Дополнительной целью изобретения служит оснащение головки ориентации приводами для элементов ориентации пучка или пучков, обладающими большим удельным вращающим моментом. Действительно, оснащение двигателями с большим вращающим моментом позволяет не только отказаться от редуктора, но также и минимизировать воздействие массы самих двигателей на инерционность головки, что обеспечивает лучший контроль за перемещением и ориентацией пучка или пучков, в частности световых, и одновременно сводит к минимуму общий объем головки.
С учетом вышесказанного представляется чрезвычайно оптимальным создать головку ориентации, способную обеспечить вращение линии визирования менее чем за 100 мс, минимизировать объем, массу и потребление тока, свести к минимуму наружные участки носителя, на котором закреплена такая головка ориентации, и, следовательно, минимизировать отрицательные эффекты, такие как след и уменьшение радиуса действия, отказаться от любого редуктора, упростить размещение на летательном аппарате (или на любом наземном или морском транспортном средстве или установке), повысить удельный вращающий момент, иметь пространственную адресацию или покрытие, составляющее 2π ср или более, и являющуюся простой и экономичной при пользовании и создании.
С этой целью изобретением предлагается устройство ориентации описанного выше типа, в котором, по меньшей мере, один из первого и второго двигателей представляет собой пьезоэлектрический ротационный двигатель с бегущей волной, содержащий:
- статор с зубчатым венцом круглого сечения, расположенным соответственно на вилке или опорном основании,
- ротор с кольцевым сегментом круглого сечения, установленным практически соосно со статорным зубчатым венцом вокруг оси угла места цели или азимута и опирающимся соосно на упомянутый венец под действием предварительного напряжения,
- по меньшей мере, одно пьезоэлектрическое кольцо с секторами возбуждения зубчатого статорного венца, причем это кольцо установлено также практически соосно с венцом вокруг соответствующей оси угла места цели или азимута и прижато к радиальной поверхности венца таким образом, чтобы возбуждался статорный венец и происходило вращательное движение ротора в момент, когда на указанные секторы возбуждения пьезоэлектрического кольца подается соответствующий электрический ток.
Пьезоэлектрические ротационные двигатели с бегущей волной представляют собой известные приводы, в частности, из патентов US 6,288,475; US 6,573,636; US 6,674,217 и ЕР 0884832, к этим документам можно обратиться за дополнительными уточнениями, касающимся конструкций двигателей, их приводов и принципа действия.
Для сокращения времени приведения устройства ориентации согласно изобретению каждый из первого и второго двигателей представляет собой предпочтительно пьезоэлектрический ротационный двигатель с бегущей волной.
В целях снижения инерционности и, следовательно, улучшения времени приведения благодаря увеличению угловых ускорений и скоростей кольцевой роторный сегмент, по меньшей мере, одного пьезоэлектрического ротационного двигателя, предпочтительно каждого из этих обоих двигателей, жестко связан при вращении с ведомым элементом, который, в свою очередь, жестко связан с передающим блоком (предпочтительно с совместимым с лазером блоком) или вилкой и приводится во вращение вокруг оси угла места цели или азимута пьезоэлектрическим ротационным двигателем.
Что касается подвижной части устройства согласно изобретению для угла места цели, то целесообразно, чтобы ведомый элемент, жестко связанный с передающим блоком, служил первым держателем этого блока, установленного в первом держателе с возможностью вращения вокруг оси угла места цели на первом из обоих концов вилки, между которыми поворачивается передающий блок.
Согласно первому варианту выполнения подвижной части для угла места цели первый двигатель представляет собой пьезоэлектрический ротационный двигатель с ротором, кольцевой сегмент которого установлен непосредственно на осевом конце приводного вала для угла места цели, расположенного практически соосно с роторным сегментом вокруг оси угла места цели и жестко связанного с первым держателем передающего блока при вращении вокруг оси угла места цели.
Для дополнительного снижения инерционности предпочтительно уменьшить осевой размер приводного вала для угла места цели до точки, в которой приводной вал практически оканчивается, в этом случае кольцевой сегмент ротора первого пьезоэлектрического ротационного двигателя будет, согласно второму варианту выполнения, непосредственно располагаться на первом держателе передающего блока в виде соосного выступа вокруг оси угла места цели на радиальной поверхности первого держателя, расположенного напротив статорного венца первого двигателя, причем этот венец располагается на первом конце вилки.
В приведенных обоих вариантах выполнения подвижной части для угла места цели передающий блок предпочтительно закрепляется между первым держателем и вторым держателем, установленным с возможностью вращения вокруг оси угла места цели на втором конце вилки посредством подвижного по оси монтажа, связывающего передающий блок с кодирующим блоком для угла места цели, который может измерять вращение передающего блока вокруг оси угла места цели.
В данном случае, согласно предпочтительно простому и практичному варианту выполнения, второй держатель передающего блока имеет продолжение по оси угла места цели в виде цилиндрического стержня, установленного с возможностью вращения вокруг оси угла места цели и соосного скольжения в отверстии, выполненном соосно в ступице диска круглого сечения, вращающегося вокруг оси угла места цели на втором конце вилки, по меньшей мере, в одном подшипнике, при этом ступица также продолжена соосно вокруг оси угла места цели посредством цилиндрической насадки, соосно вставленной в кодирующий блок для угла места цели, содержащий оптический кодер, установленный на втором конце вилки, при этом диск во время вращения связан со вторым держателем средствами блокирования вращения вокруг оси угла места цели.
Относительно статора первого пьезоэлектрического ротационного двигателя следует отметить, что в том случае, когда подвижная часть для угла места цели выполнена, как описано выше, то зубчатый венец статора, а также при необходимости, по меньшей мере, одно пьезоэлектрическое кольцо первого двигателя расположены предпочтительно простым и компактным способом соосно вокруг оси угла места цели в виде выступа на радиальной, обращенной к передающему блоку поверхности фланца, закрепленного на первом конце вилки для размещения первого двигателя.
Что касается подвижной части для азимута, то ведомый элемент, жестко связанный с вилкой, представляет собой предпочтительно опорную пластину вилки, выполненную в виде кольцевого диска, с помощью которого вилка смонтирована с возможностью вращения вокруг оси азимута на кольцевой пластине опорной поверхности, при этом центральные отверстия диска вилки и пластины опорной поверхности обеспечивают проход, по меньшей мере, одного пучка и/или средств передачи и/или приема, по меньшей мере, одного пучка в направлении к передающему блоку и/или от него.
Подобно подвижной части для угла места цели и по тем же причинам, в частности в целях простоты, компактности и уменьшения инерционности, подвижная часть для азимута может быть выполнена таким образом, чтобы кольцевой сегмент ротора второго пьезоэлектрического ротационного двигателя располагался непосредственно на осевом конце приводного вала для азимута, который является трубчатым, жестко связанным с кольцевым диском вилки и заходит по оси азимута на участке против передающего блока в центральное отверстие кольцевого диска для прохождения, по меньшей мере, одного пучка и/или средств передачи и/или приема, по меньшей мере, одного пучка в направлении к передающему блоку и/или от него.
Однако согласно второму варианту выполнения, более простому, менее инерционному и аналогичному варианту выполнения подвижной части для угла места цели, компактность подвижной части для азимута может быть улучшена за счет уменьшения осевого размера приводного вала для азимута, при необходимости, за счет полного отказа от него, в этом случае кольцевой сегмент ротора второго пьезоэлектрического ротационного двигателя будет непосредственно располагаться на кольцевом диске вилки и иметь вид выступа на радиальной поверхности кольцевого диска, обращенной в сторону опорной поверхности.
Независимо от варианта выполнения подвижной части для азимута предпочтительно, чтобы в целях упрощения конструкции и уменьшения размеров и массы зубчатый венец статора и, при необходимости, по меньшей мере, одно пьезоэлектрическое кольцо второго двигателя были установлены в виде выступа соосно оси азимута на радиальной поверхности кольцевой пластины опорной поверхности, обращенной в сторону вилки.
Кроме того, для измерения величины углового поворота передающего блока вокруг оси азимута предпочтительно, чтобы второй пьезоэлектрический ротационный двигатель был соединен на опорной поверхности с кодирующим блоком для азимута, служащим для измерения углового вращения вилки вокруг оси азимута.
Согласно варианту особо компактного выполнения второй пьезоэлектрический ротационный двигатель и кодирующий блок для азимута объединены в общий блок «двигатель-кодер», установленный на опорной поверхности таким образом, чтобы второй двигатель и кодер для азимута располагались практически с обеих сторон кольцевой пластины опорной поверхности.
Однако независимо от рассмотренного варианта выполнения для уменьшения сил трения и улучшения управления вращением подвижных частей вокруг своей оси угла места цели или оси азимута предпочтительно, чтобы кольцевой сегмент ротора первого и второго пьезоэлектрических ротационных двигателей, а также элемент или элементы, жестко связанные при вращении с этим сегментом, проходили через устройства качения, установленные соответственно на вилке и опорной поверхности.
Что касается передающего блока, то предпочтительно, чтобы им служил совместимый с лазером оптический блок, состоящий, по меньшей мере, из двух зеркал или одной бипризмы, предпочтительно описанного в документах FR 2 882 440 или FR 2 882 441 типа, в которых эта бипризма, входящая в состав головки ориентации, принимающей падающий когерентный световой пучок и отклоняющей его для получения переданного пучка, сама способна разделять передаваемый пучок на два частичных пучка, при этом бипризма соединена с устройством оптической задержки, предназначенным для введения разницы оптического пути между обоими частичными пучками, которая превышает когерентную длину падающего пучка, таким образом, чтобы оба частичных пучка не являлись когерентными между собой и чтобы при этом исключалась любая интерференция между ними.
Другие преимущества и признаки настоящего изобретения поясняются ниже с помощью отдельного, не являющегося ограничительным примера выполнения со ссылками на приложенные чертежи, на которых изображено:
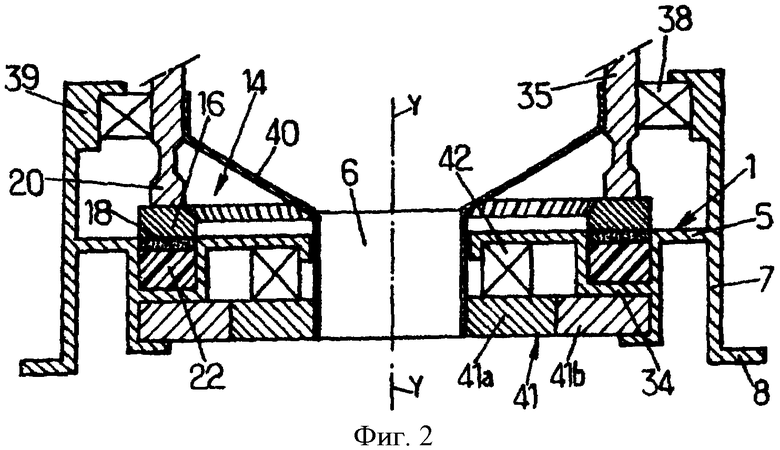
фиг.1 - схематический частичный вид на головку ориентации согласно изобретению, в разрезе по оси угла места цели головки;
фиг.2 - схематический частичный вид на головку ориентации согласно примеру на фиг.1, более точный вид в разрезе по оси азимута головки.
Изображенная на фиг.1, 2 головка ориентации содержит по существу три основных сборочных единицы, которыми являются механическая сборочная единица, совместимый с лазером оптический блок и двигатели со следящей системой.
Механическая сборочная единица содержит опорную поверхность 1 (фиг.2), на которой установлена вилка 2 (фиг.1) с возможностью вращения вокруг оси УУ азимута, при этом подвижная часть 3 расположена на вилке 2 с возможностью вращения вокруг оси XX угла места цели, перпендикулярной оси УУ азимута.
Кроме того, предпочтительно расположить опорную поверхность 1 на несущей платформе с помощью четвертой главной сборочной единицы, представляющей собой устройство для гироскопической стабилизации, которое не изображено, так как оно может быть любого известного приемлемого типа, например с «трехосным» сердечником гироскопического датчика, установленного в корпусе и связанного подвеской с опорной поверхностью 1, под которой расположен корпус.
Опорная поверхность 1, вилка 2 и подвижная часть 3 для угла места цели предназначены для обеспечения вращения оптического блока 4 и, следовательно, линии визирования этого блока в соответствии с осью XX угла места цели и осью УУ азимута таким образом, чтобы покрывалось пространство ориентации, по меньшей мере, полусферы, т.е., по меньшей мере, 2π стерадиана без наличия мертвого угла, и обеспечивалась зенитная наводка.
Оптический блок 4, совместимый с источниками лазерного излучения, в частности инфракрасными, и встроенный в подвижную часть 3 для угла места цели, может содержать зеркала, однако предпочтительно, чтобы в данном примере он содержал бипризму, закрепленную своими основаниями между двумя держателями 9, 10, установленными между двумя концами 11, 12 вилки 2 с возможностью вращения вокруг оси XX угла места цели, перпендикулярной основаниям бипризмы 4 и проходящей через ее геометрический центр, а ось УУ азимута располагалась параллельно основаниям бипризмы 4 и проходила также через его геометрический центр.
Бипризма 4 служит для приема, по меньшей мере, одного когерентного падающего светового пучка, испускаемого, например, источником лазерного излучения (не показан), расположенным на опорной поверхности 1, или освещенной мишенью в пространстве, отражающей пучок на бипризму 4, способную отклонять падающий пучок для получения переданного пучка и разделять переданный пучок на два частичных пучка, направляемых соответственно на мишень в секторе перекрытого пространства или в систему формирования изображений (не показана), расположенную на опорной поверхности 1, например в тепловую камеру, при этом бипризма 4 объединена с устройством оптической задержки, которое вводит разницу оптического пути между двумя частичными пучками, превышающую когерентную длину падающего пучка. Для этого бипризма 4 может содержать две призмы из разных материалов, как описано в FR 2 882 440, в результате чего разница коэффициентов преломления между призмами включает в себя разницу оптического пути, однако согласно варианту выполнения бипризма может содержать оптическую пластинку, расположенную подвижно между обеими призмами и образующую устройство оптической задержки, описанное в FR 2 882 441. В обоих вариантах выполнения бипризма является совместимой с лазером при его использовании, в частности она совместима с применяемыми спектральными полосами для наводки головки при разных возможных типах слежения (пассивное, активное, с тремя полосами), при этом не образуется интерференции ни при излучении, ни во время приема.
Приводной узел состоит из двух пьезоэлектрических ротационных двигателей с бегущей волной, из которых один двигатель 13 является двигателем для угла места цели, приводящим подвижную часть для угла места цели во вращение вокруг оси XX угла места цели, а второй двигатель 14 - двигателем для азимута, приводящим во вращение вокруг оси УУ азимута подвижную часть для азимута, состоящую в основном из вилки 2 и расположенных на ней компонентов.
Как и всякий пьезоэлектрический ротационный двигатель с бегущей волной, каждый из двигателей 13, 14 содержит:
- статор в виде зубчатого венца круглого сечения, соответственно 15 или 16, установленного в жестком держателе,
- пьезоэлектрическое кольцо, соответственно 17 или 18, из керамических элементов, образующее секторы возбуждения соответствующего статорного кольца 15, 16 при подаче сдвинутого по фазе синусоидального тока на секторы возбуждения, образующего бегущую волну, деформирующую по оси статорный венец 15, 16, прижатого радиальной поверхностью своего осевого конца, обращенного к жесткому держателю, к соответствующему пьезоэлектрическому кольцу 17, 18, расположенному между жестким держателем и соответствующим статорным венцом 15, 16, с которым пьезоэлектрическое кольцо 17,18 соосно,
- ротор в виде кольцевого сегмента круглого сечения 19, 20, опирающегося практически по оси на соответствующий статорный венец 15, 16 под действием осевого усилия от предварительного напряжения,
- прижимные средства 21, 22, обеспечивающие прижатие по оси зубчатого статорного венца 15, 16 к соответствующему кольцевому роторному сегменту 19, 20 посредством предварительного напряжения.
Благодаря указанным прижимным средствам 21, 22 осевая деформация статорного венца 15, 16 под действием кольца 17, 18 из пьезоэлектрических элементов, сопровождающаяся бегущей волной, вызывает известным образом вращение соответствующего кольцевого роторного сегмента 19, 20 в направлении, противоположенном направлению движения бегущей волны по статорному венцу 15, 16, при этом роторный сегмент 19, 20 приводится в действие благодаря трению между зубцами статорного венца 15,16 и противоположной контактной поверхностью роторного сегмента 19, 20, причем качество контакта определяет правильность работы двигателя и частично максимальный вращающий момент двигателя. Роторный сегмент 19, 20 предварительно статически напряжен соосно по отношению к соответствующему статорному венцу 15, 16 для обеспечения соответствующего контактного усилия порядка 200 Н в двигателе диметром, например, 50-60 мм.
Для этого целесообразно выполнить каждый двигатель 13, 14, используя данные из заявки на патент Франции FR 0600170, таким образом, чтобы жесткий держатель соответствующего статорного венца 15, 16 был таким, чтобы статорный венец 15, 16 располагался кольцеобразно и чтобы усилия нагрузки приходились на венец 15, 16 в основном симметрично по отношению к плоскости средней цилиндрической части этого венца и одновременно соответствующий контактирующий кольцевой роторный сегмент 19, 20 был жестко связан с вращающимся, перемещаемым элементом, в данном случае это - держатель 10 бипризмы 4 в двигателе 13 для угла места цели и вилка 2 в двигателе 14 для азимута.
В варианте выполнения на фиг.1 жесткий держатель статорного венца 15 и кольца 17 содержит кольцевой венец 23, расположенный соосно вокруг оси XX угла места цели под статорным венцом 15, выполненный соосно в виде выступа в сторону наружной поверхности конца 12 вилки 2, образуя кольцевую выемку четырехугольного сечения в радиальном фланце 24 (по отношению к оси XX угла места цели) для перекрытия наружного осевого конца соосного сквозного отверстия на конце 12, причем этот фланец 24 закреплен, например, винтовым креплением по периферии на конце 12 и служит для размещения статических компонентов двигателя 13 для угла места цели, а именно статорного венца 15, пьезоэлектрического кольца 17 и прижимных средств 21. Эти прижимные средства 21, создающие усилие предварительного напряжения, обеспечивающее прижатие между собой роторного сегмента 19 и статорного венца 15, состоят в данном примере из упруго деформируемого по оси кольцевого элемента, расположенного в жестком опорном венце 23 и, следовательно, между, с одной стороны, дном этого венца 23 и, с другой стороны, пьезоэлектрическим кольцом 17 и зубчатым статорным венцом 15, который располагается по отношению к фланцу 24 в виде выступа в направлении к внутренней поверхности вилки 2, а именно в направлении к внутренней поверхности осевого отверстия на конце 12 этой вилки 2. Кольцевой элемент, образующий прижимные средства 21, представляет собой в простом и экономичном варианте выполнения кольцевой блок из упруго деформируемого материала, например эластомера. Также кольцо 17 может быть расположено, по меньшей мере, частично внутри венца 23 или же, наоборот, в виде выступа вместе со статорным венцом 15 над фланцем 24 и ориентированным внутрь вилки 2.
Следовательно, своей радиальной поверхностью (по отношению к оси XX угла места цели), противоположной поверхности, которой статорный венец 15 контактирует с пьезоэлектрическим кольцом 17, статорный венец 15 прижимается с предварительным напряжением к радиальной поверхности кольцевого роторного сегмента 19, непосредственно жестко связанного с осевым концом приводного вала 25 для угла места цели, являющегося трубчатым, расположенным соосно статорному венцу 15, пьезоэлектрическому кольцу 17 и эластомерному кольцевому блоку 21, обладающий тем же средним диаметром, что и последние, причем этот трубчатый вал 25 непосредственно жестко связан своим другим осевым концом с боковым держателем 10 бипризмы 4 и вращается соосно вокруг оси XX угла места цели в подшипнике 26 с шариками или другими телами качения, установленном радиально с наружной стороны вала 25 между этим валом и концом 12 вилки 2 и обеспечивающим вращение подвижной части 3 для угла места цели на конце 12 вилки 2.
Таким образом, статорный венец 15 непосредственно приводит во вращение подвижную часть 3 для угла места цели благодаря непосредственному расположению кольцевого роторного сегмента 19 на приводном вале 25 для угла места цели, относящемся к подвижной части 3, причем такой монтаж возможен благодаря тому, что элементарный шаг пьезоэлектрического двигателя 13, т.е. наименьшее расстояние смещения этого двигателя, составляет несколько микрорадианов, при этом двигатель 13 имеет диаметр порядка 50-60 мм и управляется контуром следящей системы в очень точном положении благодаря оптическому угловому кодеру 27, установленному на наружном концевом участке соосного отверстия конца 11 вилки 2 с помощью фланца 28 с винтовым креплением, а ротор кодера 27 связан при вращении с бипризмой 4 посредством соосного диска 29, вращающегося на конце 11 вилки 2 во втором подшипнике 30 с шариками или любыми другими соответствующими телами качения, при этом цилиндрический стержень 31 расположен по оси с возможностью скольжения, жестко связан с держателем 9 бипризмы 4 и заведен по оси с возможностью скольжения в соосное отверстие ступицы диска 29, который, в свою очередь, продолжен в сторону оптического кодера 27 соосной цилиндрической насадкой 32. Кроме того, диск 29 жестко связан при вращении с держателем 9 и призмой 4 посредством соединительного элемента 33, обеспечивающего вращение диска 29 и держателя 9.
Согласно варианту выполнения, в целях дополнительного уменьшения осевых размеров подвижной части 3 для угла места цели и, следовательно, ее инерционности, приводной трубчатый вал 25 для угла места цели может не применяться, а кольцевой роторный сегмент 19 может быть выполнен непосредственно в виде соосного кольцевого выступа на радиальной поверхности держателя 10, обращенной в сторону фланца 24 и зубчатого статорного венца 15, в который упирается предварительно напряженный роторный сегмент 19. В этом варианте выполнения направленность вращения подвижной части 3 для угла места цели может обеспечиваться со стороны двигателя 13 для угла места цели подшипником 26, установленным радиально вокруг держателя 10 бипризмы 4 между этим держателем 10 и концом 12 вилки 2.
В обоих описанных вариантах выполнения двигателя 13 для угла места цели статорный венец 15 и кольцевой роторный сегмент 19, прижатые друг к другу под действием предварительного напряжения по оси (XX), постоянно имеют вид осевого выступа, расположенного между фланцем 24, внутри жесткого опорного венца 23 которого расположены, по меньшей мере, частично прижимные средства 21, с одной стороны, и держателем 10 бипризмы 4, с другой стороны.
Что касается пьезоэлектрического ротационного двигателя 14 для азимута, то он может быть выполнен аналогично описанному выше двигателю 13 для угла места цели. Действительно, опорная поверхность 1, содержащая радиальную круглую, кольцевую пластину 5 (по отношению к оси УУ азимута) с центральным круглым отверстием 6, периферийная часть которой связана трубчатой юбкой 7 со свободной ребордой 8, содержащей точки крепления опорной поверхности на платформе, выполнена таким образом, что ее кольцевая пластина 5 содержит жесткий опорный венец 34, аналогичный жесткому опорному венцу 23 фланца 24, т.е. кольцевой и соосно расположенный вокруг оси УУ, имеющий четырехугольное сечение и вид выступа на пластине 5 на противоположной стороне кольцевого роторного сегмента 20 для ограничения кольцевой канавки, вмещающей прижимные средства 22, выполненные предпочтительно в виде кольцевого блока из упруго деформируемого материала, такого как эластомер, расположенного между венцом 34, с одной стороны, и пьезоэлектрическим кольцом 18 и зубчатым статорным венцом 16, с другой стороны, причем этот венец выполнен, по меньшей мере, частично в виде выступа над кольцевой пластиной 5, при этом эластомерный блок 22 прижимается под действием предварительного напряжения к кольцевому роторному сегменту 20, жестко связанному непосредственно с нижним концом (фиг.2) соосного трубчатого приводного вала 35 при вращении вилки 2 и расположенных на ней компонентов вокруг оси УУ азимута, при этом другой осевой конец вала 35 жестко связан при вращении вокруг оси УУ с вилкой 2, предпочтительно, как показано на фиг.1, с единственной деталью и опорной пластиной 36 вилки 2, причем эта пластина 36 выполнена в виде круглого диска с центральным отверстием 37, расположенным практически на осевом продолжении (по оси УУ азимута) центрального отверстия 6 на кольцевой пластине 5 опорной поверхности 1.
Следовательно, подвижная часть для азимута, состоящая, по существу, из вилки 2 и расположенных на ней компонентов, а также приводного вала 35 для азимута, приводится во вращение непосредственно зубчатым статорным венцом 16, приводящим также в действие кольцевой роторный сегмент 20, выполненный за одно целое с валом 35, вращающимся вокруг оси УУ азимута в подшипнике 38 с шариками или любыми другими телами качения, удерживаемым, например, на опорной поверхности 1 трубчатым держателем 39.
В качестве варианта кольцевой роторный сегмент двигателя 14 может быть выполнен, как показано на фиг.1, позиция 20′, в виде выступа под радиальной нижней поверхностью кольцевого опорного диска 36 обоих концов 11 и 12 вилки 2 в том случае, когда приводной вал 35 для азимута исключен, в результате чего кольцевой роторный сектор 20′ непосредственно контактирует с зубчатым статорным венцом 16 двигателя 14 для азимута, при этом направленность вращения может обеспечиваться подшипником 38 радиально вокруг нижней части кольцевого диска 36 и между этой нижней частью и закрепленным на опорной поверхности 1 кольцевым держателем 39.
Кроме того, в примере выполнения, содержащем приводной вал 35 для азимута (см. фиг.2), частично усеченно-конический трубчатый элемент 40 позволяет жестко связать вал 35 с ротором 41а углового кодера 41, статор 41b которого расположен на опорной поверхности 1, например, под жестким опорным венцом 34 невращающихся компонентов двигателя 14, как это схематически показано на фиг.2. При таком монтаже направленность вращения вокруг оси УУ азимута может обеспечиваться посредством другого подшипника 42, установленного между ротором 41а углового кодера 41 и кольцевой выемкой на опорной поверхности 1 вокруг центрального отверстия 6 кольцевой пластины 5.
В отношении описанных выше обоих вариантов выполнения привода вилки 2 двигателем 14 для азимута можно отметить, что зубчатый статорный венец 16 и кольцевой роторный сегмент 20 или 20' располагаются постоянно напротив друг друга и соосно в виде выступа по отношению к круглой пластине 5 опорной поверхности 1, несущей на себе невращающиеся части двигателя 14 с другой стороны кольцевой пластины 36, служащей основанием вилки 2.
В обоих случаях двигатель 14 для азимута выполнен в виде двигателя с полой или трубчатой осью, приводящего в действие вилку 2 для азимута, при этом центральные отверстия 6, 37 образуют центральный проход для светового пучка или пучков (например, при лазерной телеметрии и формировании изображений), необходимых для применения головки, а именно для наводки при пассивном или активном слежении, даже сканировании при наблюдении.
Выполненная таким образом головка ориентации обладает очень простой конструкцией и большим быстродействием, позволяя достигать показатели покрытия 90° линии визирования бипризмы 4 менее чем за 100 мс благодаря пьезоэлектрическим двигателям с большим соотношением вращающего момента к массе, которое существенно превышает (от 3 до 4 раз) такое же соотношение традиционных электромагнитных двигателей и которое дополнительно улучшено благодаря очень низкой инерционности этой головки, в которой низкая масса двигателей 13, 14 благодаря их простоте, компактности конструкции и малому количеству составных частей позволяет дополнительно снизить инерционность головки ориентации. Отсюда следует, что при этом достигается не только очень высокое соотношение вращающего момента к массе, но и может быть получен практически мгновенно максимальный вращающий момент, что обеспечивает очень большие угловые ускорения порядка 3000 радиан/с2.
Кроме того, такая конструкция позволяет применять в головке подшипники, такие как подшипники 26 и 38, в качестве опоры для двигателей 13, 14 благодаря непосредственному размещению роторов 19 и 20 в приводимых во вращение элементах (25, 35), что дополнительно позволяет упростить конструкцию и существенно сократить количество механических деталей, а следовательно, массу и размеры головки. Кроме того, в детали или деталях, приводимых во вращение вокруг оси УУ азимута, может быть высвобождена центральная часть в приводном валу 35 для азимута и/или в кодере 41 для азимута для прохода, по меньшей мере, одного светового пучка или для размещения любого другого устройства, для которого требуется расположение по оси УУ азимута.
В качестве варианта выполнения угловой кодер 41 и двигатель 14 для азимута могут быть выполнены в виде блока «двигатель-кодер» для азимута, который устанавливается на опорной поверхности 1 таким образом, чтобы двигатель 14 и кодер 41 располагались практически с обеих сторон кольцевой пластины 5 опорной поверхности 1, при этом двигатель 14 находится, по существу, на стороне пластины 5, обращенной в сторону вилки 2, а кодер 41 располагается на другой стороне, предохраняемой внутри трубчатой юбкой 7.
В качестве альтернативы также возможно приводить в действие опорную пластину 36 вилки 2 с помощью блока «двигатель-кодер» со сплошной осью, смещенной относительно оси УУ азимута и способной приводить в действие опорную пластину 36 с помощью ремня или зубчатого зацепления.
Согласно другим вариантам выполнения средства прижатия 21, 22 могут не иметь вид кольцевых тел из эластомера, они могут быть выполнены в соответствии с другими вариантами, раскрытыми в FR 06 00170, например, в виде герметичных трубчатых тел, образованных, по меньшей мере, одной упруго деформируемой стенкой, предпочтительно двумя боковыми противоположенными стенками практически С- или S-образной простой или сложной формы, соединенными герметично с соответствующим статорным венцом 15 или 16 и заполненные газом под давлением, или же двумя подвесными рычажными узлами, равномерно распределенными и размещенными между соответствующим статорным венцом 15 или 16 и двумя неподвижными венцами, образующими соответствующий жесткий держатель, расположенными радиально с обеих сторон статорного венца 15, 16, один внутри, другой снаружи, причем оба радиально удалены от статорного венца 15, 16, при этом рычаги подвески имеют форму С и/или S, необходимую для упругой деформации и симметричного расположения между соответствующим статорным венцом 15 или 16 и двумя неподвижными венцами.
Благодаря угловым кодерам 27, 41 оба пьезоэлектрических двигателя 13, 14 автоматически регулируются по закону управления моделью со специфическими свойствами. Этот закон управления предусматривает применение специальной карты питания двигателя и учитывает характеристики двигателя, а также нелинейность частоты в зависимости от скорости для беспрепятственного прохождения рабочего диапазона двигателя в зоне «частота - скорость» без риска остановки двигателя.
Применение такого управления обеспечивает максимальную эффективность каждого двигателя 13, 14 в отношении вращающего момента, скорости и точности позиционирования при всех перемещениях.
Следящая система двигателей 13, 14 состоит из контуров скорости и позиционирования, обладающих нелинейными характеристиками, присущими пьезоэлектрическим двигателям.
Контур скорости, представляющий собой тип более низкого уровня, обеспечивает характеристику «скорость/частота» двигателя 13 или 14. Эта характеристика измеряется при заданной рабочей температуре, при этом компенсируются эффекты, связанные с термодинамикой (колебаниями рабочей температуры) и воздействующие на характеристики двигателей 13, 14. Предпочтительно, чтобы управление пьезоэлектрическим ротационным двигателем 13 и/или 14 производилось в соответствии с описанием заявки на патент Франции FR 0606438. Помимо этой модели, призванной обеспечить линейные характеристики двигателя, контур скорости оснащен линейным корректором.
Контур положения (более высокого уровня) содержит нелинейный корректор, которым учитываются показатели динамической мощности двигателя 13 или 14. Этот контур вырабатывает команды скорости, на основе которых оптические элементы 4 занимают заданные положения и исключаются остановки двигателя 13 или 4, вызванные командами, не совместимыми с областью применения этих двигателей.
Контуры следящей системы для снабженных приводами осей являются эквивалентными и позволяют дополнительно вводить данные о слежении и стабилизации от датчиков, таких как головки наведения или гироскопы.
Таким образом, каждая подвижная часть, вращающаяся вокруг оси (угла места цели или азимута), регулируется по положению и/или скорости с обеспечением контроля за вращающим моментом и/или ускорением при вращении рассматриваемой подвижной части (для угла места цели или азимута).
За пределами надира стабилизация пучка возможна единственно с помощью устройства ориентации согласно изобретению. Действительно, такая инновация возможна благодаря выбору следующей компоновки:
- пьезоэлектрические двигатели с непосредственным приводом и измененный закон управления, позволяющий достигнуть ускорения линии визирования 3000 радиан/с2;
- блок 4 оптической передачи и ориентации линии визирования центрируется при пониженной инерционности и
- встраивание кодеров 27,41 известного типа с высокой степенью разрешения.
Применение совокупности этих приемов позволяет использовать устройство ориентации линии визирования согласно изобретению для наводки и стабилизации. Очень большая полоса пропускания при ориентации подвижных частей по углу места и азимуту позволяет предложить описанную выше компоновку и принцип инерциальной стабилизации. Это возможно благодаря тому, что в устройстве ориентации согласно изобретению пьезоэлектрические двигатели используются в полной мере для контроля инерциальной стабилизации линии визирования, в т.ч. и при высоких частотах. Действительно, если «двухосные» традиционные устройства ориентации основываются на инерционности оптронной части или стабилизирующих зеркал при обработке высоких частот спектра дестабилизации, то устройство ориентации согласно изобретению позволяет активно их компенсировать.
Как известно, пьезоэлектрический ротационный двигатель с бегущей волной блокируется в состоянии покоя посредством сухого трения в том случае, когда на возбуждающие секторы пьезоэлектрического кольца не поступает питания, и обладает тормозом при поступлении питания (жидкое трение). В то же время ему присущи значительные параметры вращающего момента, позволяющие достигать угловые ускорения порядка 3000 радианов/с2, как уже отмечалось выше.
Устройство ориентации согласно изобретению использует, по меньшей мере, один, предпочтительно два пьезоэлектрических ротационных двигателя, вращающий момент которых применяется для блокирования или торможения. Каждый из обоих пьезоэлектрических двигателей может быть использован во всем диапазоне своей мощности, не ограничиваемой следящей системой, для компенсации высоких частот дестабилизации без применения инерционности оптронной части или зеркал или бипризмы 4. Следствием такого выбора согласно изобретению стала возможность создания очень компактной головки ориентации. Ее механическая часть выполнена с обеспечением минимизации инерционности движущихся деталей, объема и общей массы головки ориентации. Подвижные части для угла места цели и азимута уравновешены, т.е. их центр тяжести расположен на оси азимута для подвижной части для азимута и с большой вероятностью на пересечении оси угла места цели с осью азимута для подвижной части для угла места цели, в результате чего предупреждаются вращательные движения линии визирования, вызываемые линейными ускорениями при дисбалансах.
Наконец, контур системы слежения за скоростью и/или положением предпочтительно содержит, как указывалось выше, встроенный гироскоп для инерциальной стабилизации линии визирования и устройство точной стабилизации для устранения известного недостатка стабилизации «двухосных» головок с надиром, а также для компенсации остаточных движений линии визирования на выходе из головки ориентации.
Наряду с отмеченными преимуществами головка ориентации согласно изобретению позволяет компенсировать вибрации активным способом единственно с помощью более широкой полосы пропускания следящей системы с высокими частотами благодаря полному использованию параметров пьезоэлектрических двигателей, что стало возможным благодаря оригинальной оптико-механической компоновке инерциальной системы слежения за линией визирования при высоких частотах, обеспечиваемой головкой ориентации согласно изобретению.
Таким образом, создана эффективная, простая и быстродействующая головка ориентации со световым пучком, обладающая превышающим от трех до четырех раз вращающим моментом на единицу массы по сравнению с аналогичными сдвоенными электромагнитными двигателями, известными из уровня техники, и позволяющая в результате этого свести к минимуму воздействие массы самих двигателей на инерционность оптронной платформы, отказаться от устройства для снижения скорости/повышения необходимого вращающего момента, применяемого в известных из уровня техники устройствах, обеспечивающая быстрое и точное управление световым пучком, при этом минимальное смещение каждого двигателя 13, 14 составляет несколько микрорадианов при диаметре двигателя около 50 мм.
Также необходимо отметить, что головка для ориентации/стабилизации пучка согласно изобретению хорошо приспособлена не только к любым системам наведения пучка при использовании в наземных, морских и воздушных условиях, но также и к системам панорамного оптронного наблюдения в том случае, когда головка согласно изобретению применяется в качестве головки для панорамного сканирования, при котором применяется так называемый принцип "Step and stare" (шаг/внимательный взгляд) без применения дополнительного специального устройства для встречного вращения.
Действительно, с помощью оптико-механического устройства согласно изобретению можно создать систему без пластины встречного вращения и без блока стабилизации, в котором все функции будут выполняться единственным оптико-механическим устройством ориентации/стабилизации и встречного вращения линии визирования согласно настоящему изобретению.
В рамках авиационной безопасности разработка системы автоматического обнаружения и предупреждения требует создание оптико-механических головок ориентации, которые способны ориентировать оптическую линию визирования (формирование изображений и лазер) в панорамном пространстве, покрывающем 360° по азимуту и, по меньшей мере, тридцать градусов по углу места цели. В такой системе автоматического обнаружения и предупреждения устройство наблюдения, позволяющее обнаруживать летательные аппараты в районе соответствующей площадки и следить за ними в ближнем воздушном пространстве, состоит в принципе из оптико-механической головки панорамного сканирования, объединенной с оптронным устройством пассивного слежения, наделенным телеметрической функцией, содержащим лазер и контрольный электронный корпус. Оптико-механическая головка такого устройства наблюдения должна отвечать определенным требованиям:
- пространственное покрытие: оптико-механическая конструкция устройства наблюдения может основываться на бипризме, головке с двумя или четырьмя зеркалами, управляемой по углу места цели и азимуту, благодаря чему головка может покрывать пространство более чем на 2π ср, обеспечивая при этом покрытие, по меньшей мере, одного поля в 30° угла по месту цели, отцентрированного по горизонту и компенсируемого, по меньшей мере, на ±45° по углу места цели (для соблюдения горизонтальной плоскости наблюдения) и на 360° по азимуту,
- быстродействие пространственной адресации (20° линии визирования по азимуту в течение менее чем за 50 мс): смещение одной кадровой съемки по отношению к другой является главным фактором, способствующим времени сканирования, так как среднее время оптического интегрирования при захвате изображений составляет порядка 1 мс, при этом время приведения позиции изображения к другой последующей позиции для панорамного покрытия 360° составляет несколько десятков микросекунд, в частности, скорость обновления панорамного визирования составляет порядка 1-2 Гц.
Достижение такого быстродействия возможно благодаря головке ориентации согласно изобретению, обеспечивающей одновременно низкую инерционность оптико-механических деталей и оснащение пьезоэлектрическими двигателями с бегущей волной, которые обеспечивают очень высокий удельный вращающий момент, как уже отмечалось выше.
Кроме того, устройство наблюдения, известное их уровня техники, выполняет функцию "Step and Stare" для линии визирования посредством головки ориентации, вращающейся с постоянной скоростью, движение которой, вызываемое линией визирования, компенсируется устройством встречного вращения (пластина или зеркало с возвратно-поступательным движением), вращающимся в обратном направлении и при той же одинаковой оптической скорости, что и головка ориентации, в результате чего достигается инерциальная стабильность линии визирования в течение времени интеграции изображения.
Преимущество головки ориентации согласно настоящему изобретению состоит в том, что она может обходиться без устройства встречного вращения благодаря оснащению пьезоэлектрическими двигателями для прямого привода при ориентации линии визирования оптического блока 4, а также благодаря большой мощности вращающего момента двигателей такого типа.
Наконец, в отношении других требований, касающихся инерциальной стабилизации и совместимости со спектральными полосами оптронного устройства, следует отметить, что они являются общими в случае проведения панорамного наблюдения посредством сканирования и активного или пассивного слежения путем наводки и, следовательно, являются выполнимыми с помощью ориентируемой головки согласно изобретению благодаря рассмотренным выше свойствам.
Во время применения при панорамном наблюдении посредством сканирования подвижную часть для угла места цели устройства ориентации согласно изобретению регулируют по положению или скорости с использованием инерциальной метки, эта подвижная часть позволяет пересечь поле, по меньшей мере, порядка 30° и отцентрировать ее по горизонту с учетом движений платформы, по меньшей мере, на 30°, при этом подвижная часть для азимута позволяет привести вилку во вращательное движение на 360° вокруг оси УУ азимута.
Таким образом, головка ориентации согласно изобретению особенно хорошо пригодна в качестве головки панорамного сканирования пучка в устройстве наблюдения в наземных, морских и воздушных условиях. Также и в этом назначении она обеспечивает инерциальное автоматическое регулирование линии визирования при высоких частотах благодаря полному использованию параметров пьезоэлектрических двигателей 13, 14. При этом назначении преимущества головки ориентации согласно изобретению, заключающиеся в минимизации объема, массы и потребления тока, негативных явлений в виде следа и сокращения радиуса действия, компенсации вибраций с помощью активного метода благодаря более широкой полосе пропускания следящей системы при высоких частотах, сохраняются и дополняются преимуществами, присущими наблюдению сканированием, а именно упрощением функции сканирования в режиме "Step and Stare" благодаря отказу от устройства встречного вращения, параметрам крутящего момента пьезоэлектрических двигателей в сочетании с указанными выше специфическими законами управления двигателями 13, 14 головки согласно изобретению и благодаря большому быстродействию при ориентации с достижением 20° вращения линии визирования менее чем за 50 мс, позволяющему достигать скорости обновления панорамного сканирования порядка 1-2 Гц при 360° поля для азимута и пространственной адресации не менее ±45° для угла места цели, при этом поле составляет не менее 30° для угла места цели.
Само собой разумеется, что принцип изобретения применим и в том случае, когда только один из двигателей 13, 14 является пьезоэлектрическим двигателем с бегущей волной.
Предпочтительно, чтобы пьезоэлектрические двигатели 13, 14 с бегущей волной, применяемые в головке ориентации согласно изобретению, были такого же типа, что и описанные в заявке на патент Франции FR 06 06439, согласно которой статор двигателя возбуждается двумя соосными кольцами пьезоэлектрических элементов, приложенных каждый соответственно к одной из обеих радиально противоположенных поверхностей кольцевого статора, и к которой можно обратиться за соответствующими дополнительными уточнениями.
Изобретение относится к устройствам ориентации типа «двухосной» головки ориентации в различных транспортных средствах. В устройстве ориентации блока (4) для передачи, по меньшей мере, одного пучка для угла места цели и/или для азимута этот блок установлен на вилке (2) с возможностью вращения вокруг оси (XX) угла места цели и приводится во вращение вокруг этой оси двигателем (13), установленным на вилке (2), которая расположена на опорной поверхности с возможностью вращения вокруг оси (УУ) азимута, перпендикулярной оси (XX) угла места цели, и приводится во вращение вокруг этой оси (УУ) вторым двигателем, установленным на опорной поверхности, при этом, по меньшей мере, один из двигателей представляет собой пьезоэлектрический ротационный двигатель с бегущей волной. Достигаемым техническим результатом изобретения является повышение точности ориентации, уменьшение размеров, расхода электроэнергии и материальных затрат. 16 з.п. ф-лы, 2 ил.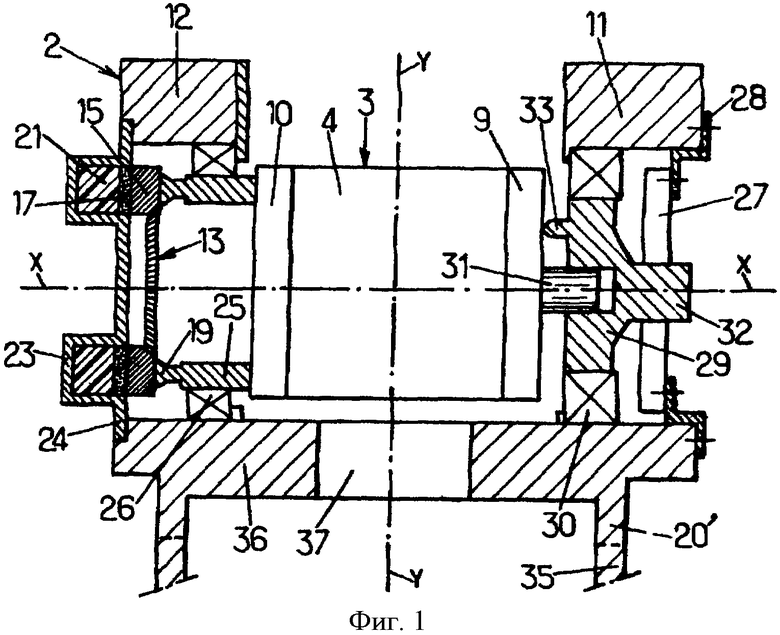
1. Устройство для ориентации типа «двухосной» головки ориентации, предназначенное для ориентации, по меньшей мере, одного блока (4) для передачи, по меньшей мере, одного светового и/или электромагнитного пучка для угла места цели и/или для азимута путем вращения этого передающего блока (4) вокруг соответственно оси (XX) угла места цели и/или оси (УУ) азимута, устройство, в котором передающий блок (4) установлен на вилке (2) с возможностью поворота вокруг первой оси, называемой осью (XX) угла места цели, и способный приводиться во вращение вокруг указанной оси угла места цели первым двигателем (13), установленным на вилке (2), расположенной на опорной поверхности (1) с возможностью поворота вокруг второй оси, называемой осью (УУ) азимута, перпендикулярной к оси (XX) угла места цели, и способной приводится во вращение вокруг оси азимута вторым двигателем (14), установленным на опорной поверхности (1),
отличающееся тем, что, по меньшей мере, один из названных первого (13) и второго (14) двигателей является пьезоэлектрическим ротационным двигателем с бегущей волной, содержащий:
- статор с зубчатым венцом (15, 16) круглого сечения, расположенным соответственно на вилке (2) или опорной поверхности (1),
- ротор с кольцевым сегментом (19, 20), расположенный практически соосно с зубчатым статорным венцом (15, 16) вокруг оси (XX) угла места цели или оси (УУ) азимута и опирающийся по оси на указанный венец под действием предварительного напряжения и
- по меньшей мере, одно пьезоэлектрическое кольцо (17, 18) с секторами для возбуждения зубчатого статорного венца (15, 16), при этом кольцо (17, 18) расположено также, по существу, соосно с венцом (15, 16) вокруг оси (XX) угла места цели или оси (УУ) азимута и прижато к радиальной поверхности этого венца (15, 16) таким образом, чтобы возбуждался статорный венец (15, 16) и происходило вращательное смещение ротора (19, 20) в тот момент, когда на упомянутые секторы возбуждения пьезоэлектрического кольца (17, 18) поступает соответствующий электрический ток.
2. Устройство для ориентации по п.1, отличающееся тем, что каждый из первого (13) и второго (14) двигателей представляет собой пьезоэлектрический ротационный двигатель с бегущей волной.
3. Устройство для ориентации по п.1, отличающееся тем, что кольцевой роторный сегмент (19, 20), по меньшей мере, одного пьезоэлектрического ротационного двигателя (13, 14) жестко связан при вращении с ведомым элементом (10, 36), жестко связанным соответственно с передающим блоком (4) или вилкой (2) и приводимым во вращение вокруг соответствующей оси (XX) угла места цели или оси (УУ) азимута пьезоэлектрическим ротационным двигателем.
4. Устройство для ориентации по п.3, отличающееся тем, что ведомый элемент, жестко связанный с передающим блоком (4), является первым держателем (10) этого блока, установленного посредством первого держателя (10) с возможностью вращения вокруг оси (XX) угла места цели на первом (12) из обоих концов (12,11) вилки (2), между которыми блок передачи поворачивается.
5. Устройство для ориентации по п.4, отличающееся тем, что первый двигатель (13) является пьезоэлектрическим ротационным двигателем, кольцевой роторный сегмент (19) которого непосредственно связан с первым держателем (10) передающего блока (4) и выполнен в виде соосного выступа вокруг оси (XX) угла места цели на радиальной поверхности первого держателя (10), установленного напротив статорного венца (15) первого двигателя (13), при этом венец (15) расположен на первом конце (12) вилки (2).
6. Устройство для ориентации по п.4, отличающееся тем, что первый двигатель (13) является пьезоэлектрическим ротационным двигателем, кольцевой роторный сегмент (19) которого установлен непосредственно на осевом конце приводного вала (25) для угла места цели, практически соосно с роторным сегментом (19) вокруг оси (XX) угла места цели и жестко связан с первым держателем (10) передающего блока (4) при вращении вокруг оси (XX) угла места цели.
7. Устройство для ориентации по любому из пп.4-6, отличающееся тем, что передающий блок (4) закреплен между первым держателем (10) и вторым держателем (9), установленным на втором конце (11) вилки (2) с возможностью вращения вокруг оси (XX) угла места цели с помощью подвижного по оси монтажа, связывающего передающий блок (4) с кодирующим блоком (27) угла места цели, производящим измерение вращения передающего блока (4) вокруг оси (XX) угла места цели.
8. Устройство для ориентации по п.7, отличающееся тем, что второй держатель (9) передающего блока (4) имеет продолжение по оси (XX) угла места цели в виде цилиндрического стержня (31), расположенного с возможностью вращения вокруг оси (XX) угла места цели и способного скользить по оси в соосном отверстии ступицы диска (29) круглого сечения, вращающегося вокруг оси (XX) угла места цели на втором конце (11) вилки (2) посредством, по меньшей мере, одного подшипника (30), причем ступица также имеет соосное продолжение вокруг оси (XX) угла места цели в виде цилиндрической насадки (32), установленной соосно в кодирующий блок (27) для угла места цели, содержащий предпочтительно оптический кодер на втором конце (11) вилки (2), при этом диск (29) связан при вращении со вторым держателем (9) средствами (33) блокирования вращения вокруг оси (XX) угла места цели.
9. Устройство для ориентации по любому из пп.4-6, отличающееся тем, что зубчатый статорный венец (15) и, при необходимости, по меньшей мере, одно пьезоэлектрическое кольцо (17) первого двигателя (13) расположены соосно вокруг оси (XX) угла места цели в виде выступа на радиальной, обращенной в сторону передающего блока (4) поверхности фланца (24), закрепленного на первом конце (12) вилки (2), для размещения первого двигателя (13).
10. Устройство для ориентации по любому из пп.4-6, отличающееся тем, что ведомый элемент, жестко связанный с вилкой (2), представляет собой опорную пластину (36) вилки (2), выполненную в виде кольцевого диска, посредством которого вилка (2) установлена на кольцевой пластине (5) опорной поверхности (1) с возможностью вращения вокруг оси (УУ) азимута, при этом центральные отверстия (37, 6) диска (36) вилки (2) и пластины (5) опорной поверхности (1) обеспечивают прохождение, по меньшей мере, одного пучка и/или средств передачи и/или приема, по меньшей мере, одного пучка в направлении к передающему блоку (4) и/или от него.
11. Устройство для ориентации по п.10, отличающееся тем, что второй двигатель (14) является пьезоэлектрическим ротационным двигателем, кольцевой роторный сегмент (20′) которого непосредственно связан с кольцевым диском (36) вилки (2) и выполнен в виде выступа на радиальной поверхности кольцевого диска (36), обращенного в сторону опорного основания (1).
12. Устройство для ориентации по п.10, отличающееся тем, что второй двигатель (14) является пьезоэлектрическим ротационным двигателем, кольцевой роторный сегмент (20) которого непосредственно связан с осевым концом приводного вала (35) для азимута, который выполнен трубчатым, жестко связанным с кольцевым диском (36) вилки (2) и входит по оси (УУ) азимута на участке напротив передающего блока (4) в центральное отверстие (37) кольцевого диска (36) для прохождения, по меньшей мере, одного пучка и/или средств передачи и/или приема, по меньшей мере, одного пучка в направлении к передающему блоку (4) и/или от него.
13. Устройство для ориентации по п.10, отличающееся тем, что зубчатый статорный венец (16) и, при необходимости, по меньшей мере, одно пьезоэлектрическое кольцо (18) второго двигателя (14) расположены в виде соосного выступа вокруг оси (УУ) азимута на радиальной поверхности кольцевой пластины (5) опорной поверхности (1), обращенной в сторону вилки (2).
14. Устройство для ориентации по п.10, отличающееся тем, что второй пьезоэлектрический ротационный двигатель (14) соединен на опорной поверхности (1) с кодирующим блоком (41) для азимута, служащим для измерения углового вращения вилки (2) вокруг оси (УУ) азимута.
15. Устройство для ориентации по п.14, отличающееся тем, что пьезоэлектрический ротационный двигатель (14) и кодирующий блок (41) для азимута объединены в блок «двигатель/кодер», установленный на опорной поверхности (1) таким образом, что второй двигатель (14) и кодер (41) азимута расположены практически по обе стороны кольцевой пластины (5) опорной поверхности (1).
16. Устройство для ориентации по любому из пп.3-6, отличающееся тем, что кольцевой роторный сегмент (19, 20) первого (13) и второго (14) пьезоэлектрических ротационных двигателей, а также элемент или элементы (25, 35), жестко связанные при вращении с указанным сегментом, проходят через устройства качения (26, 38), расположенные соответственно на вилке (2) и опорной поверхности (1).
17. Устройство для ориентации по любому из пп.1-6, отличающееся тем, что передающий блок представляет собой совместимый с лазером оптический блок, содержащий бипризму (4) или узел, по меньшей мере, из двух зеркал.
| FR 2882440 A1, 25.08.2006 | |||
| КОНТРОЛЬНАЯ ДОСКА С ПОДВИЖНЫМИ КУБИКАМИ ДЛЯ ПЛАНИРОВАНИЯ И УЧЕТА ПРОИЗВОДСТВА | 1925 |
|
SU3165A1 |
| СПУТНИКОВАЯ ЛАЗЕРНАЯ ДАЛЬНОМЕРНАЯ СИСТЕМА | 1992 |
|
RU2037849C1 |
| ЛАЗЕРНО-РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2004 |
|
RU2263930C1 |
| СПОСОБ ПОЛУЧЕНИЯ УГЛЕРОДНОГО АДСОРБЕНТА | 2020 |
|
RU2740559C1 |
| EP 0427649 A1, 15.05.1991 | |||
| WO 9308449 A1, 29.04.1993. | |||

