Изобретение относится к трубопроводному транспорту и может быть использовано для контроля за техническим состоянием пересечений магистральных трубопроводов (МТ).
При взаимном пересечении МТ могут возникать нежелательные процессы, связанные с их взаимодействиями, имеющими различную физическую природу. В пересечениях может наблюдаться нестабильность пространственного положения трубопроводов, которая приводит как к появлению силового контакта между МТ, так и к превышению уровня его напряженно-деформированного состояния.
С другой стороны, в МТ, подключенных к устройствам катодной защиты, может наблюдаться повышение разности потенциалов между трубопроводами, превышающее допустимый уровень. Это может привести к резкому ускорению коррозионных процессов трубопровода, находящихся в анодной зоне.
Изменения климата, приводящие к изменениям многолетней динамики температурных режимов, еще больше обостряют указанные выше проблемы.
В настоящее время в патентной и научно-технической литературе отсутствуют источники, касающиеся диагностики технического состояния пересечений МТ.
Ниже описываются способ и система, направленные на решение задачи диагностики технического состояния пересечений МТ, не имеющие аналогов.
Технический результат состоит в реализации этого назначения.
Способ диагностики технического состояния пересечений МТ заключается в том, что измеряют значения линейных деформаций D1(t), D2(t) пересекающихся трубопроводов во времени t в местах их пересечения и контролируют принадлежность измеренных значений соответствующим интервалам допустимых значений (Dн1…Dв1), (Dн2…Dв2) и в случае выхода хотя бы одного измеренного значения D1(t) или D2(t) за границы соответствующего интервала допустимых значений диагностируют угрозу опасного состояния пересечения.
Система того же назначения включает на каждом трубопроводе в месте пересечения m датчиков напряженно-деформированного состояния, m аналого-цифровых преобразователей, микропроцессор и средство связи с диспетчерским пунктом, при этом оси чувствительности датчиков напряженно-деформированного состояния направлены вдоль трубопровода, на котором они расположены, выход каждого датчика подключен через соответствующий аналогово-цифровой преобразователь к микропроцессору, а микропроцессор - к средству связи с диспетчерским пунктом (m=1, 2, 3…).
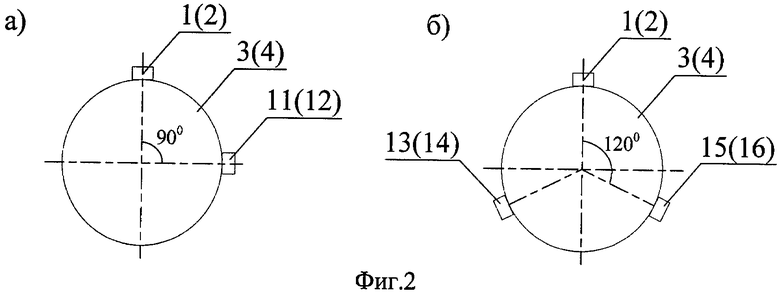
Система содержит на каждом трубопроводе в месте пересечения по два датчика напряженно-деформированного состояния трубопровода, отстоящих друг от друга на угол ±90°.
Система содержит на каждом трубопроводе в месте пересечения по три датчика напряженно-деформированного состояния трубопровода, отстоящих друг от друга на ±120°.
В системе средство связи с диспетчерским пунктом выполнено в виде радиомодема.
В системе средство связи с диспетчерским пунктом выполнено в виде блока передачи цифровой информации по кабелю.
В системе средство связи с диспетчерским пунктом выполнено в виде блока передачи цифровой информации по трубопроводу.
Изобретение поясняется чертежами. На фиг.1 представлена схема системы для реализации способа на примере одного пересечения двух МТ; на фиг.2 - диаграммы, поясняющие различные варианты выполнения системы; на фиг.3 - временные диаграммы, поясняющие существо способа и работу системы.
Система для реализации способа содержит датчики 1 и 2 напряженно-деформированного состояния, установленные соответственно на трубопроводах 3, 4, усилители 5, 6, аналогово-цифровые преобразователи 7, 8 (АЦП 7, 8), микропроцессор 9 (МП 9) и средство связи с диспетчерским пунктом (не показан). Средство связи может быть выполнено в частном случае в виде радиомодема 10.
Система может содержать в качестве резервных средств связи блоки передачи цифровой информации по кабелю и (или) трубопроводу (не показаны).
Оси чувствительностей датчиков 1, 2, установленных в месте пересечения (скрещивания) МТ 3, 4, направлены вдоль трубопроводов, на которых установлены датчики.
Количество датчиков напряженно-деформированного состояния в общем случае может быть любым и ограничено относительными размерами зоны пересечения трубопроводов и самих датчиков. Наиболее оптимальными случаями реализации системы является установка в месте пересечения МТ двух датчиков на каждом из трубопроводов под углом ±90°, например на трубопроводе 3 - датчиков 1, 11, а на трубопроводе 4 - датчиков 2, 12 (фиг.2а), или установка трех датчиков на каждом из трубопроводов под углом ±120°, например на трубопроводе 3 - датчиков 1, 3, 15, а на трубопроводе 4 - датчиков 2, 14, 16 (фиг.2б).
Выходы датчиков 1, 2 (фиг.1) подключены через усилители 5, 6 ко входам АЦП 7, 8, соединенных выходами с МП 9, выход которого подключен к управляемому входу средства связи с диспетчерским пунктом, в данном случае - к радиомодему 10.
Способ диагностики технического состояния пересечений МТ реализуется в системе того же назначения следующим образом.
С помощью датчиков 1, 2 измеряют значения линейных деформаций D11, D12 … и D21, D22 … в месте пересечения трубопроводов 3 и 4 в различные моменты времени t.
Выходной сигнал с датчиков 1, 2 усиливают в усилителях 5, 6 и оцифровывают в АЦП 7, 8 и затем направляют на МП 9.
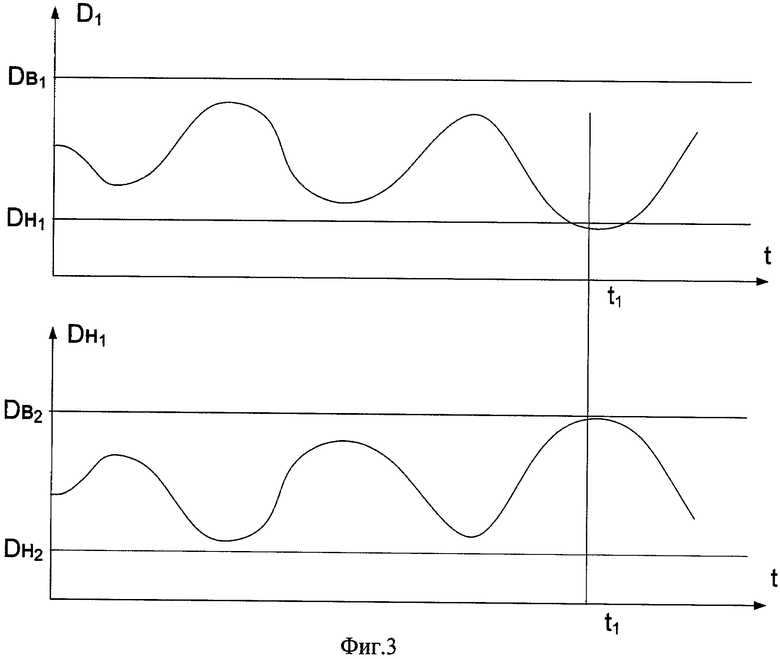
В МП 9 измеренные значения линейных деформаций D11, D12, … и D21, D22 … проверяются на предмет их принадлежности наперед заданным интервалам (Dн1…Dв1), (Dн2…Dв2) допустимых значений линейных деформаций (фиг.3).
Интервалы допустимых значений линейных деформаций для каждого из пересекающих трубопроводов задаются в МП 9 исходя из многолетних наблюдений значений линейных деформаций трубопроводов в штатном режиме их работы. Обычно они составляют величины порядка 10-3.
В случае выхода хотя бы одного измеренного значения D1(t) или D2(t) за границы соответствующего интервала допустимых значений линейных деформаций диагностируют угрозу опасного состояния пересечения.
МП 9 в этом случае формирует специальный предупредительный сигнал, передаваемый по радиомодему 10 на диспетчерский пункт.
При наличии на МТ нескольких датчиков (фиг.2а, б) надежность контроля опасного состояния пересечения трубопроводов повышается.
При диагностике нескольких пересечений МТ существо способа не изменяется. При этом каждое пересечение дополняется своими датчиками напряженно-деформированного состояния и своими блоками обработки сигналов, совпадающими с описанными выше и представленными на чертежах (фиг.1, 2).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПЕРЕСЕЧЕНИЙ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2413902C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2009 |
|
RU2423644C2 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ВЗАИМНЫХ ПЕРЕСЕЧЕНИЙ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2009 |
|
RU2427752C2 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПЕРЕСЕЧЕНИЙ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2009 |
|
RU2423643C2 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДВОДНОГО МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2009 |
|
RU2433334C2 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПЕРЕХОДА МАГИСТРАЛЬНОГО ТРУБОПРОВОДА ЧЕРЕЗ ДОРОГУ | 2009 |
|
RU2433335C2 |
| СПОСОБ МОНИТОРИНГА И ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2451874C1 |
| СПОСОБ ДИСТАНЦИОННОГО НАБЛЮДЕНИЯ ЗА СОСТОЯНИЕМ ЛИНЕЙНОЙ ЧАСТИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2616736C1 |
| АППАРАТУРА ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ДЕФОРМАЦИЙ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2007 |
|
RU2334162C1 |
| СИСТЕМА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПЕРЕХОДА МАГИСТРАЛЬНОГО ТРУБОПРОВОДА С УСТРОЙСТВОМ КАТОДНОЙ ЗАЩИТЫ ЧЕРЕЗ ДОРОГУ | 2009 |
|
RU2433333C2 |
Способ диагностики технического состояния пересечений магистральных трубопроводов и система для его реализации относятся к трубопроводному транспорту и могут быть использованы для контроля технического состояния пересечений магистральных трубопроводов. Способ заключается в том, что измеряют значения линейных деформаций D1(t), D2(t) пересекающихся трубопроводов во времени t в местах их пересечения и контролируют принадлежность измеренных значений соответствующим интервалам допустимых значений (Dн1…Dв1), (Dн2…Dв2) и в случае выхода хотя бы одного измеренного значения D1(t) или D2(t) за границы соответствующего интервала допустимых значений диагностируют угрозу опасного состояния пересечения. Система для диагностики технического состояния пересечений магистральных трубопроводов содержит на каждом трубопроводе в месте пересечения m датчиков напряженно-деформированного состояния, m аналого-цифровых преобразователей, микропроцессор и средство связи с диспетчерским пунктом, при этом оси чувствительности датчиков напряженно-деформированного состояния направлены вдоль трубопровода, на котором они расположены, выход каждого датчика подключен через соответствующий аналогово-цифровой преобразователь к микропроцессору, а микропроцессор - к средству связи с диспетчерским пунктом (m=1, 2, 3…). Технический результат - повышение надежности контроля технического состояния пересечений магистрального трубопровода. 2 н. и 5 з.п. ф-лы, 3 ил.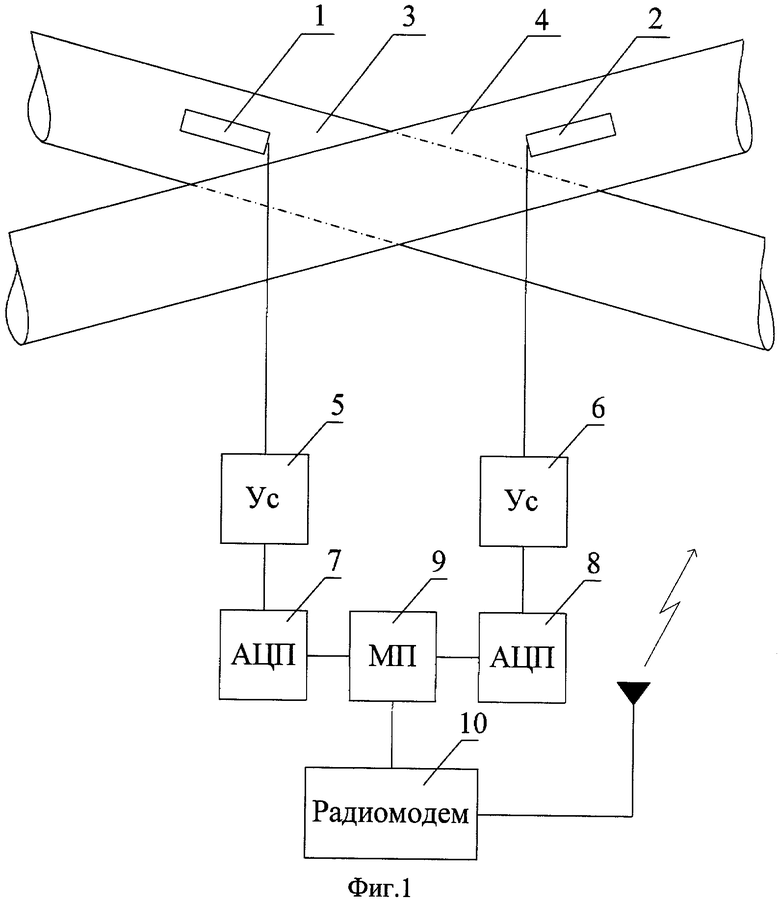
1. Способ диагностики технического состоящая пересечений магистральных трубопроводов, заключающийся в том, что измеряют значения линейных деформаций D1(t), D2(t) пересекающихся трубопроводов во времени t в местах их пересечения и контролируют принадлежность измеренных значений соответствующим интервалам допустимых значений (Dн1…Dв1), (Dн2…Dв2) и в случае выхода хотя бы одного измеренного значения D1(t) или D2(t) за границы соответствующего интервала допустимых значений диагностируют угрозу опасного состояния пересечения.
2. Система для диагностики технического состояния пересечений магистральных трубопроводов, содержащая на каждом трубопроводе в месте пересечения m датчиков напряженно-деформированного состояния, m аналого-цифровых преобразователей, микропроцессор и средство связи с диспетчерским пунктом, при этом оси чувствительности датчиков напряженно-деформированного состояния направлены вдоль трубопровода, на котором они расположены, выход каждого датчика подключен через соответствующий аналогово-цифровой преобразователь к микропроцессору, а микропроцессор - к средству связи с диспетчерским пунктом (m=1, 2, 3…).
3. Система по п.2, содержащая на каждом трубопроводе в месте пересечения по два датчика напряженно-деформированного состояние трубопровода, отстоящие друг от друга на угол ±90°.
4. Система по п.2, содержащая на каждом трубопроводе в месте пересечения по три датчика напряженно-деформированного состояния трубопровода, отстоящие друг от друга на ±120°.
5. Система по п.2, у которой средство связи с диспетчерским пунктом выполнено в виде радиомодема.
6. Система по п.2, у которой средство связи с диспетчерским пунктом выполнено в виде блока передачи цифровой информации по кабелю.
7. Система по п.2, у которой средство связи с диспетчерским пунктом выполнено в виде блока передачи цифровой информации по трубопроводу.
| СПОСОБ ПЕРЕМЕЩЕНИЯ ВЫСОКОВЯЗКИХ ЖИДКОСТЕЙ ПО ТРУБОПРОВОДУ | 2007 |
|
RU2334161C1 |
| УСТРОЙСТВО ДЛЯ МОНИТОРИНГА НАПРЯЖЕНИЯ В СТАЛЬНЫХ ПОДЪЕМНЫХ ТРУБОПРОВОДАХ, УЛОЖЕННЫХ ПО ЦЕПНОЙ ЛИНИИ | 2003 |
|
RU2326345C2 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПАРЫ МАГИСТРАЛЬНЫЙ ТРУБОПРОВОД-ЗАЩИТНЫЙ ПАТРОН | 2006 |
|
RU2317479C1 |
| Способ контроля протяженных цилиндрических металлопроводов | 1986 |
|
SU1363080A1 |
| US 4289019 A, 15.09.1981 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЕМКОСТИ ПОЛУПРОВОДНИКОВОГО ПРИБОРА | 2012 |
|
RU2498325C1 |

