Изобретение относится к области авиационного приборостроения и может быть использовано для раннего оповещения экипажа летательного аппарата, преимущественно вертолета, о ведении огня по летательному аппарату из стрелкового оружия.
В технике широко используются акустические методы распознавания звуков, в том числе летящего вертолета, движущегося автомобиля или звука выстрела (см., например, JP 9033331, G01H 3/08, 1997 или JP 9033629, G01S 3/808, 1997). В обоих случаях используется система микрофонов и пороговый анализатор спектра.
Однако при размещении подобной системы на борту вертолета, шумы и вибрации создают столь значительные помехи, что распознать звук выстрела на их фоне чрезвычайно сложно. Кроме того, данное устройство не позволяет четко отличить выстрел в сторону вертолета от выстрела в ином направлении, т.е. выделить выстрелы, представляющие угрозу для безопасности летательного аппарата.
Наиболее близкой к предложенной является система повышения безопасности летательного аппарата, содержащая блок датчиков и процессор выживаемости с блоком приоритетов, на который поступает также навигационная информация (см. US 2009173788, G06F 19/00, 09.07.2009). Данная система распознает визуальные угрозы и выделяет наиболее опасные.
Недостатком известной системы повышения безопасности летательного аппарата является недостаточная эффективность в условиях отсутствия прямой видимости и сложность конструкции, а также вероятностный характер распределения целей по их опасности, отсутствие однозначной уверенности в том, что ведется направленный огонь по вертолету или имеются попадания.
Техническим результатом, ожидаемым от использования изобретения, является создание простой и надежной системы раннего оповещения экипажа летательного аппарата, бортовых систем жизнеобеспечения и наземных служб о ведении огня вблизи, ведении его в направлении летательного аппарата и попадании в него, причем во всех случаях речь идет о повышении достоверности, а в последнем - о достижении практически 100%-ной достоверности. Еще одной задачей, решаемой в предложении, является создание системы, которая информировала бы экипаж о реальной обстановке средствами, не отвлекающими его от выполнения основных функций, в частности, за счет панорамного представления информации оператору акустическими и оптическими средствами с учетом эволюции летательного аппарата. Кроме того, в предложении решается задача увеличения отношения сигнал/шум и выделения на фоне шумов механической природы, в частности шума двигателя, редуктора и т.п. - нештатных сигналов механической природы, например стука разрушающейся обшивки о корпус летательного аппарата. В предложении решается также задача ранжирования угроз по степени опасности (близость точки ведения огня; калибр, когда он определен по звуковому образу; направление на источник угрозы относительно направления движения и риск сближения и т.п.).
Указанный результат достигается тем, что известная система повышения безопасности летательного аппарата, содержащая первый блок датчиков и процессор, снабжена вторым блоком датчиков, причем первый и второй блоки датчиков выполнены в виде блоков акустических и вибропреобразователей соответственно, а процессор выполнен с возможностью выделения сигналов, соответствующих выстрелу, пролету и попаданию в корпус летательного аппарата, из выходных сигналов блоков акустических и вибропреобразователей и анализа выделенных сигналов на фоне шумов путем выявления корреляции между последовательностями выделенных сигналов, соответствующих выстрелу, пролету и попаданию соответственно.
Целесообразно также выполнить процессор с возможностью представления информации, являющейся результатом анализа выделенных сигналов на фоне шумов, в виде панорамной картины с учетом эволюции летательного аппарата, информация о которых поступает в него от системы управления летательного аппарата.
Кроме того, процессор может быть выполнен с возможностью определения направления выстрела и точки попадания по величине задержки между выходными сигналами блоков акустических и вибропреобразователей, обусловленных одним и тем же выстрелом и попаданием соответственно.
При этом процессор может быть выполнен в виде блока сигнализации, блока корреляции и двух каналов, каждый из которых образован последовательно соединенными пороговыми блоками, анализаторами частоты, анализаторами задержки и формирователями последовательности, выходы которых соединены с первым и вторым входами блока сигнализации и входами блока корреляции, выход которого подключен к третьему входу блока сигнализации.
Рассмотрим существо предложения более подробно. Итак, особенностью предложенной системы повышения безопасности летательного аппарата является наличие блоков акустических и вибропреобразователей. Это означает, что на поверхности летательного аппарата размещены два множества преобразователей. Причем элементы этих множеств распределены по всей поверхности летательного аппарата равномерно или, во всяком случае, по той части поверхности, которая обращена к земле. Далее, у выстрела сверхзвуковым снарядом есть три отличительных признака - расположим их в порядке времени поступления информации: попадание с локализацией места в системе борта; прохождение мимо волны конуса сверхзвукового барьера при промахе - «щелчок» вблизи преобразователей при промахе, по которому может строиться траектория; приходящий с земли звук выхлопа с характерными особенностями калибра или хлопка старта.
Комбинации этих трех признаков с учетом эволюции борта за время хода звуковой волны позволяют однозначно определить координату угрозы, если система обладает достаточным динамическим диапазоном. Для дозвукового оружия и стартов различных управляемых снарядов в качестве признака имеем только характерный выхлоп, а место и время попадания, ввиду сложной управляемой траектории или работы систем самонаведения, вовсе не определяет направление на точку старта.
Наличие акустических преобразователей (микрофонов) позволяет принимать акустические сигналы и, после соответствующей обработки в процессоре, анализа амплитуды, фазы и «отпечатка» в целом, путем сопоставления с другими сигналами, принятыми остальными преобразователями, фиксировать факт выстрела и определять траекторию движения снаряда и точку старта, и передавать всю эту информацию экипажу или наземным службам.
Наличие вибропреобразователей позволяет очищать акустическую картину от посторонних периодических шумов (например, шума двигателя), фиксировать новые звуки, характерные для нештатных ситуаций, попадания в корпус и близкий полет снаряда. В связи с этим необходимо пояснить, что если множественные попадания в элементы конструкции летательного аппарата являются событием уже катастрофическим, представляющим впоследствии интерес для наземных служб, то близкий пролет сверхзвукового объекта и связанный с этим характерный «щелчок», регистрируемый системой, должен мобилизовать именно экипаж. В то же время именно наличие двух множеств преобразователей (акустических и вибро) позволяет четко идентифицировать «щелчок», отличить его от ударов насекомых по корпусу и т.п. Поэтому под термином «попадание» будем иметь в виду не только прямое попадание в корпус, но и пролет в некоторой заранее определенной близости от него.
Правильная интерпретация сигналов от двух множеств преобразователей, размещенных на корпусе летательного аппарата, достигается путем «обучения», «тренировки» совокупности преобразователей и процессора, то есть настройки алгоритма распознавания упомянутых событий.
Для учета эволюции летательного аппарата за интервал времени, например, с момента поступления первого импульсного сигнала от выстрела, процессор получает от блока управления летательным аппаратом или его навигационной системы и учитывает в расчетах данные о величине и направлении скорости, угловой скорости, линейного и угловых ускорений борта.
Учитывая изложенное, выполнение процессора с возможностью выделения сигналов, соответствующих выстрелу, пролету и попаданию в корпус летательного аппарата, из выходных сигналов блоков акустических и вибропреобразователей означает, что процессор выполнен с возможностью различения сигналов, соответствующих выстрелу, пролету и попаданию (например, сигналы выстрела и пролета воспринимаются в основном акустическими преобразователями и различаются по спектру, амплитуде и времени относительно прочих сигналов, а попадания или близкого пролета регистрируются преимущественно вибропреобразователями и выделяются на фоне шумов также по спектру, амплитуде и величине задержки).
При этом выявление корреляции между последовательностями выделенных сигналов, соответствующих выстрелу, пролету и попаданию соответственно, означает, что процессор выявляет корреляцию как между однородными, так и между разнородными сигналами, что и позволяет создать у оператора наиболее полную картину происходящего. Однородными сигналами здесь именуются сигналы преобразователей одного типа, например акустических, а разнородными - различного типа, акустических и вибропреобразователей. Так, если снаряд пролетает мимо летательного аппарата снизу вверх, то акустические датчики, размещенные вдоль траектории, зафиксируют последовательность близко расположенных идентичных импульсных сигналов, интервал между которыми очевидным образом определяется только скоростью снаряда и расстоянием между преобразователями. А если величина интервала будет отличаться от описанной, значит, траектория определенным образом наклонена по отношению к линии расположения акустических датчиков. Корреляция между близко расположенными сигналами линейки акустических датчиков и вибропреобразовалем будет свидетельствовать о попадании и также укажет на направление, откуда ведется огонь.
Например, летательный аппарат идет на высоте 500 метров с крейсерской скоростью 250 км/ч (ок. 70 м/с), одновременно совершая маневр с левым креном (например, угловая скорость относительно продольной оси 10 град/с). Для простоты рассмотрим одиночное попадание сверхзвуковым боеприпасом по корпусу в момент t0 на второй секунде маневра: учет высоты и скорости боеприпаса дают оценку подлетного времени, например, ок. 0,7 секунды, что дает соответственно угловую поправку направления на источник угрозы 7 градусов. Зарегистрированное далее событие выстрела по звуковому сигналу соответствует, например, моменту t0+2 секунды и в привязке к системе координат внешних датчиков борта требует поправок к определенному датчиками направлению на источник 20 градусов за счет угловой скорости и по координате угрозы - за счет скорости движения. При этом звуковой образ самого выстрела в процессе регистрации должен корректироваться с доплеровской поправкой на относительную скорость движения.
Выявление корреляции может быть реализовано в процессоре так же, как накопительная корреляция между выстрелами очереди, а параметры при вычислениях (скорость боеприпаса и т.п.) могут корректироваться итерационно.
Таким образом, акустическая система повышения безопасности летательного аппарата обеспечивает летчика следующей акустической или визуальной информацией (разумеется, будучи снабжена соответствующими средствами отображения на выходе процессора): перечнем угроз летательному аппарату с возможностью их ранжирования по степени опасности; информацией о каждом выстреле и направлении, адаптированной с учетом скорости звука, предполагаемой скорости и длины пути снаряда, а также эволюции борта за соответствующий интервал времени - что значительно облегчает восприятие такой информации пилотом и уменьшает время его реакции. При этом критерием выделения наиболее опасных угроз может быть опасность сближения с точкой ведения огня, близость пролета или даже попадание в корпус летательного аппарата, причем возможное направление определяется путем нахождения корреляции с последующим приходом звукового сигнала с поверхности или выявления направления других прошедших мимо борта выстрелов.
И, наконец, сам способ представления информации оператору (пилоту) - выбирается наиболее комфортный - в виде акустической картины, адаптированной к особенностям слуха (изменение спектра, длительности и т.п.), что может осуществляться как в индивидуальном шлемофоне, так и созданием соответствующей акустической обстановки в рамках всей кабины и сопровождаться, при необходимости, оптическими метками, хорошо воспринимаемыми, в том числе периферическим зрением человека. При этом для беспилотного аппарата вариант с кабиной (комнатой оператора) безусловно удобнее, поскольку не требует, как в случае шлемофона, регистрации положения головы пилота, в то время как в пилотируемом аппарате вариант шлемофона лучше, поскольку система регистрации положения головы часто является составляющей прицельной системы, а создать требуемую звукоизоляцию всей кабины довольно сложно. С этой целью на выходе процессора устанавливаются соответствующие средства преобразования и/или передачи сигналов датчиков, подвергнутых обработке, которая заключается в исключении шумов, выделении и формировании информации о положении угроз, направлении стрельбы, попаданиях, в удобный для восприятия экипажем вид.
Иными словами, система обеспечивает определение события одиночного выстрела или очереди (что чаще присутствует и что удобнее выявлять); способ организации панорамной аудиокартины с удобными для восприятия оператора сигналами - помимо голосовых и визуальных сообщений, а также традиционных отмечаний источников угроз на карте или схематическом рельефе поверхности и т.п. может присутствовать также возможность полной или частичной компенсации звуковой картины самого борта, что может использоваться для выявления характерных звуков неисправностей (в том числе вызванных попаданиями) и возможности адаптировать, например, режим полета к факту колебаний элементов поврежденной обшивки и т.п.
На фиг.1 приведен один из множества возможных примеров реализации предлагаемой системы, на фиг.2 - временная диаграмма, поясняющая работу устройства. Система содержит (фиг.1) блок 1 акустических преобразователей, блок 2 вибропреобразователей и процессор 3. Блок 1 образован N (N=1, 2…) акустическими преобразователями (микрофонами) 4, расположенными на нижней и боковой поверхности вертолета. Блок 2 образован М (М=1, 2…) вибропреобразователей (датчиков вибрации, акселерометров или иных элементов, фиксирующих ударное воздействие) 5, также расположенными на нижней и боковой поверхности вертолета.
В варианте, показанном на фиг.1, процессор выполнен в виде двух каналов, каждый из которых образован последовательно соединенными пороговыми блоками 6, 7, анализаторами частоты 8, 9, анализаторами задержки 10, 11 и формирователями последовательности 12, 13, выходы которых соединены с первым и вторым входами блока 14 сигнализации и входами блока 15 корреляции, выход которого подключен к третьему входу блока 14 сигнализации.
Работу устройства рассмотрим совместно с вариантами реализации отдельных блоков.
Блоки 6 и 7 могут быть образованы компараторами 16, сравнивающими входной сигнал с пороговым значением, зависящим от типа преобразователя (4 или 5) и расположения акустического преобразователя 4 или вибропреобразователя 5. Т.е. пороговое значение компараторов 16 блока 6 отличается от порогового значения компараторов 16 блока 7, а внутри блоков 6 и 7 пороговое значение компараторов 16 также устанавливается различным в зависимости от расположения преобразователя (скажем, для боковой поверхности вертолета порог ниже, чем для днища). Блоки 8, 9 предназначены для выделения по частоте (полосе частот) и/или фронту звука выстрела (для блока 8) или ударного воздействия пули (для блока 9). Эти блоки могут быть выполнены на базе полосовых фильтров 17. Выходные сигналы последовательно соединенных компараторов 16 и полосовых фильтров 17 уже являются «отпечатком» выстрела или попадания, в зависимости от того, к какому каналу они относятся, то есть выделенные фильтрами 17 сигналы соответствуют выстрелу и попаданию. Отпечатками являются также выходные сигналы формирователей 12, 13. Иными словами, выполнение процессора 3 с возможностью выделения и последующего анализа отпечатка звука выстрела или ударного воздействия от попадания означает, что в процессоре из выходных сигналов блоков 1, 2 выделяются сигналы, импульсы, амплитуда и частотный спектр которых или форма которых характерны для стрелкового оружия и именно между этими двумя последовательностями или группами импульсов устанавливается наличие корреляционной связи.
Назначением анализаторов 10, 11 является устранение влияния задержки, обусловленной различным расположением преобразователей на корпусе вертолета или использование задержки для определения месторасположения стрелка. Например, если выстрел произведен на некотором расстоянии по курсу вертолета, то на выходе полосового фильтра 17 блока 8, расположенного на носу летательного аппарата, фронт звуковой волны появится раньше, чем на выходе полосового фильтра 17 того же блока, расположенного на хвосте. В первом случае анализаторы 10, 11 выполняют в виде тактируемых элементов задержки 18, осуществляющих привязку входных импульсов к частоте тактового генератора, что позволяет исключить влияние задержки, обусловленной различным расположением преобразователей на корпусе вертолета.
Во втором случае анализаторы 10, 11 выполняют в виде элементов задержки 18, тактируемых (запускаемых) тем элементом задержки 18 данного блока 10 или 11, на который первым поступил входной импульс. В обоих случаях элементы 18 формируют одинаковые по форме прямоугольные импульсы, поступающие на формирователи последовательности 12 и 13, которые в простейшем случае представляют собой логический элемент ИЛИ.
В первом из рассмотренных случаев на его выходе появится одиночный импульс, соответствующий приему микрофонами 4 (формирователь последовательности 12) или вибропреобразователями 5 (формирователь последовательности 13) соответственно акустической волны от выстрела или ударного воздействия от попадания в корпус. Во втором - последовательность импульсов от каждого из выстрелов (попаданий), причем интервал между импульсами несет информацию о точке, из которой произведен выстрел (для формирователя последовательности 12) или точке попадания (для формирователя последовательности 13).
Выходной сигнал преобразователей 4 свидетельствует о наличии любых источников акустической энергии: выстрелов в том или ином направлении, шумов иной природы, например карбюраторных выхлопов. Однако на вход формирователя последовательности 12 поступают только импульсы, соответствующие выстрелам, так что его выходной сигнал свидетельствует о том, что в данной местности ведется стрельба.
Аналогичным образом выходной сигнал вибропреобразователей 5 несет информацию о любых источниках вибрации на борту, в то время как на вход формирователя последовательности 12 поступают только импульсы, соответствующие попаданиям из стрелкового оружия или очень сходные по силе и спектру воздействия. Та же информация анализируется в блоке 15 и при установлении корреляции делается однозначный вывод о попадании из стрелкового оружия (соответствующий сигнал с выхода блока 15 поступает на блок 14).
Разумеется, процессор 3 может быть выполнен иначе, например, блоки 10-15 могут быть реализованы программными средствами или с целью упрощения блоки 10, 11 и 14 исключены, так что импульсные последовательности просто сопоставляются в блоке 15 и при наличии корреляции делается вывод о попадании.
Рассмотренное выше выполнение процессора 3 позволяет установить корреляцию между отпечатками выстрелов и попаданий, но не определить откуда сделан выстрел или куда произошло попадание. Для решения этой задачи используют процессор 3, реализованный программными средствами. В нем также анализируется форма импульсов и, дополнительно, задержка между импульсами, поступающими от преобразователей одного блока 1 (2) датчиков. При этом, как и в вышеописанном примере, по обоим каналам выделяются «отпечатки» выстрелов и, если задержка виброканала 7-9-11-13 от акустического канала 6-8-10-12 близка к времени полета пули с учетом высоты летательного аппарата, выдается сигнал о попадании в корпус. Средства же обработки выходных сигналов блоков 1, 2 в процессоре 3 могут быть самыми различными, аппаратными или программными, в том числе и любыми из известных, важно лишь выделить сигналы, сходные с теми, что дают выстрелы и выявить корреляцию между сигналами с блоков 1 и 2. Наличие нескольких преобразователей 4 и 5 позволяет по величине задержки между их выходными сигналами получить дополнительную информацию о точке, из которой ведется стрельба или той точке корпуса, в которую произошло попадание. Алгоритм определения направления выстрела по задержкам выходных сигналов преобразователей 4 определяется геометрией расположения последних. Например, если первым появился сигнал на носовом преобразователе 4, а затем одновременно на симметрично размещенных боковых, после чего на хвостовом, выстрел произведен точно по курсу, если сначала на левом, а затем одновременно на носовом и хвостовом - точно слева и т.д. Так же относительные задержки вибропреобразователей 5 пересчитываются для определения точки попадания.
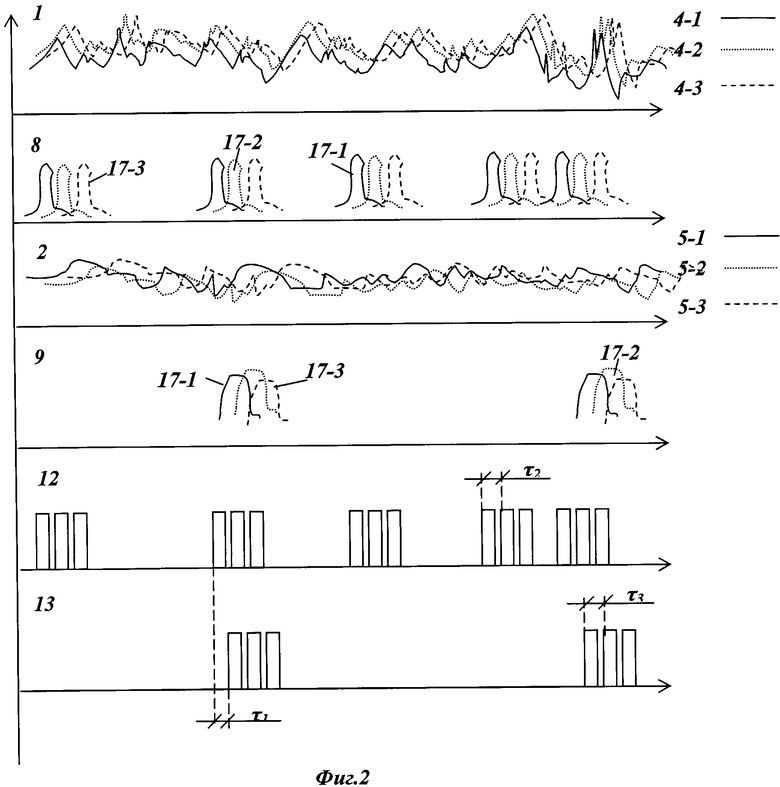
Сказанное иллюстрируется временными диаграммами (фиг.2), на которых сверху вниз изображены выходные сигналы трех акустических преобразователей 4-1, 4-2 и 4-3 блока 1, выходные сигналы полосовых фильтров 17-1, 17-2 и 17-3 блока 8, выходные сигналы вибропреобразователей 5-1, 5-2, 5-3 блока 2, выходные сигналы полосовых фильтров 17-1, 17-2 и 17-3 блока 9, выходные сигналы формирователей 12 и 13 соответственно. Задержка τ1 равна времени полета пули, так что ее измерение в процессоре и сопоставление с расчетным временем полета пули позволяет выявить корреляцию даже одиночных акустического и виброимпульсов. Задержка t2 равна времени распространения звуковой волны в воздухе от одного акустического преобразователя до другого, так что анализ задержек этого типа позволяет при известном расположении преобразователей 4 на корпусе вертолета определить направление выстрела. Задержка τ3 равна времени распространения звуковой волны в корпусе от одного вибропреобразователя до другого, так что анализ задержек этого типа позволяет при известном расположении преобразователей 5 на корпусе вертолета определить точку попадания.
Рассмотренные выше примеры не исчерпывают возможностей реализации заявленного устройства, задачей которого является адекватное освещение акустической обстановки, позволяющее дать пилоту или командиру информацию о локализации (местоположении) источников угроз вне зависимости (т.е. с учетом) эволюции борта и притом наиболее наглядным образом. Например, индикация выстрелов и попаданий может быть организована путем передачи соответствующих адаптированных звуковых отпечатков в акустическую систему кабины, специализированный шлемофон с функцией регистрации положения головы и т.п., что служит созданию у оператора (пилота) иллюзии звуковой прозрачности аппарата и отсутствия задержки (от собственной скорости аппарата - за счет внесенных поправок), когда он ощущает перемещающиеся вокруг звуковые метки угрожающих направлений, адаптированные до удобного для слуха уровня (расширением огибающей, повторами и т.п.), снабженные комментариями (например, указанием типа угрозы, калибра), и, сливаясь с машиной, интуитивно уходит из-под удара. Изложенное реализуется в процессоре 3 программными средствами.
Все вышеизложенное относится также к полуавтоматическим беспилотным системам, где оператор находится на земле, «мысленно сливаясь» с объектом управления. Там также информация должна вбрасываться квадрофонически или иным способом в доработанный шлем (и может дублироваться помимо этого малоразмерными оптическими метками, если координата угрозы находится в передней полусфере и должна быть условно "видна") либо в звуковое пространство кабины соответствующими излучателями, создавая панорамную картину обстановки.
При освещении окружающей акустической обстановки при быстрых маневрах ЛА, известной высоте полета или другой дополнительной информации о локализации источников звука (например, на поверхности земли) информация перед предоставлением пилоту может быть скорректирована соответствующим образом с учетом скорости распространения звука в воздушной среде и изменения положения ЛА за время распространения (а при определении факта обстрела стрелковым оружием с попаданием по корпусу информация системы с учетом эволюции ЛА используется для уточнения этого факта и местоположения источника угрозы).
Предлагаемые решения предназначены для улучшения живучести ЛА в сложной обстановке за счет лучшей информированности пилота в момент принятия решений.
Необходимо подчеркнуть также, что в процессоре 3 может осуществляться предварительная фильтрация шумов механической природы и прежде всего шума двигателя и других систем борта. При возникновении различных неисправностей, связанных с усилением или изменением звучания различных агрегатов (имеющих при этом непрерывные спектры звучания, в отличие от выстрелов и попаданий и легко вычитаемых системой ввиду этого) у оператора должен быть выбор их полной или неполной компенсации по звуку - для возможности диагностики и наблюдения за развитием аварийной ситуации. Средства реализации подобного алгоритма широко известны.
Таким образом, предлагаемая акустическая система позволяет на фоне любых шумов и помех с высокой надежностью зафиксировать различные угрозы аппарату, включая попадание в корпус ЛА. Кроме того, система обеспечивает получение дополнительной информации, отличается простотой и высокой надежностью. Предлагаемые решения предназначены для улучшения живучести ЛА в сложной обстановке за счет лучшей информированности пилота в момент принятия решений.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТРЕЛКОВ | 2010 |
|
RU2512128C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПОЛУЧЕНИЯ АКТИВНОГО ПРОГРАММИРУЕМОГО АКУСТИЧЕСКОГО МЕТАМАТЕРИАЛА | 2015 |
|
RU2671643C2 |
| БОРТОВОЕ ОБОРУДОВАНИЕ ДЛЯ ОБНАРУЖЕНИЯ СТРЕЛЬБЫ И СОДЕЙСТВИЯ ПИЛОТИРОВАНИЮ | 2016 |
|
RU2717753C2 |
| Система обеспечения посадки вертолёта (варианты) | 2017 |
|
RU2674283C1 |
| Мобильный радиотелевизионный комплекс | 2023 |
|
RU2836656C1 |
| СПОСОБ УПРАВЛЕНИЯ ЗАГРАДИТЕЛЬНЫМИ ОГНЯМИ ИЛИ, СООТВЕТСТВЕННО, ВЕТРОВОЙ ПАРК ДЛЯ ВЫПОЛНЕНИЯ ТАКОГО СПОСОБА | 2012 |
|
RU2592151C2 |
| СПОСОБ И СИСТЕМА МОНИТОРИНГА АВИАЦИОННОГО ШУМА | 2021 |
|
RU2775874C1 |
| СПОСОБ И УСТРОЙСТВО АКУСТИЧЕСКОГО ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2589290C1 |
| СИСТЕМА АЭРОНАВИГАЦИОННЫХ ДАННЫХ | 1996 |
|
RU2159443C2 |
| Способ разведки ледовой обстановки с использованием дистанционно управляемых беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2778158C1 |
Изобретение относится к области авиационного приборостроения и может быть использовано для раннего оповещения экипажа летательного аппарата, преимущественно вертолета, о ведении огня по летательному аппарату из стрелкового оружия. Техническим результатом является повышение надежности системы безопасности летательного аппарата за счет панорамного представления информации оператору акустическими и оптическими средствами. Система содержит первый блок датчиков и процессор, причем система снабжена вторым блоком датчиков, при этом первый и второй блоки датчиков выполнены в виде блоков акустических и вибропреобразователей соответственно, а процессор выполнен с возможностью выделения сигналов, соответствующих выстрелу, пролету и попаданию в корпус летательного аппарата, из выходных сигналов блоков акустических и вибропреобразователей и анализа выделенных сигналов на фоне шумов путем выявления корреляции между последовательностями выделенных сигналов, соответствующих выстрелу, пролету и попаданию соответственно. 3 з.п. ф-лы, 2 ил.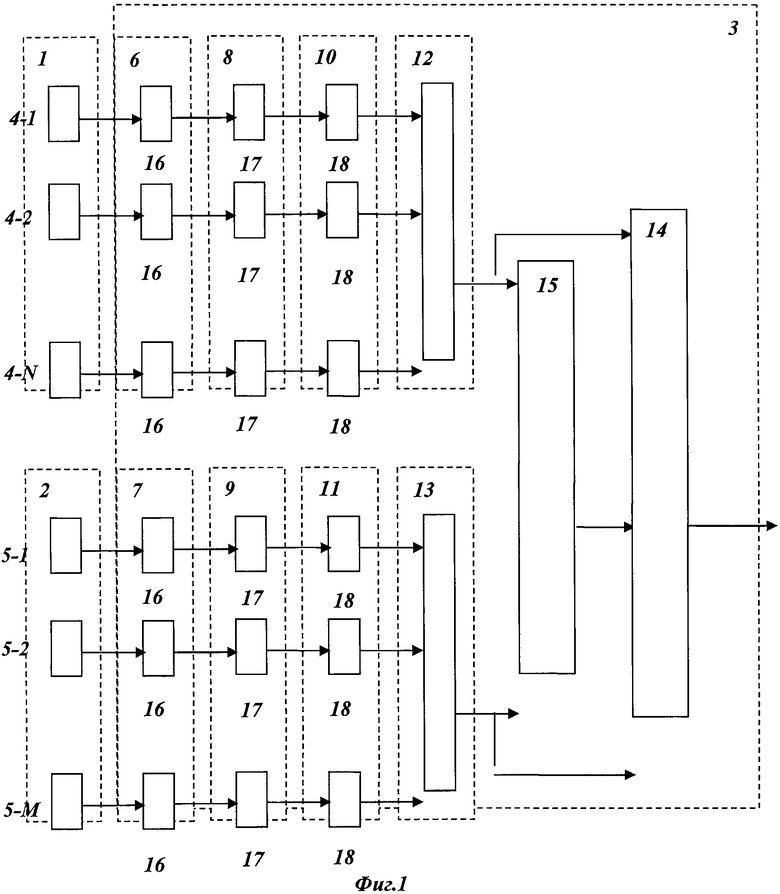
1. Система повышения безопасности летательного аппарата, содержащая первый блок датчиков и процессор, отличающаяся тем, что она снабжена вторым блоком датчиков, причем первый и второй блоки датчиков выполнены в виде блоков акустических и вибропреобразователей соответственно, а процессор выполнен с возможностью выделения сигналов, соответствующих выстрелу, пролету и попаданию в корпус летательного аппарата, из выходных сигналов блоков акустических и вибропреобразователей и анализа выделенных сигналов на фоне шумов путем выявления корреляции между последовательностями выделенных сигналов, соответствующих выстрелу, пролету и попаданию соответственно.
2. Система по п.1, отличающаяся тем, что процессор выполнен также с возможностью представления информации, являющейся результатом анализа выделенных сигналов на фоне шумов, в виде панорамной картины с учетом эволюции летательного аппарата, информация о которых поступает в него от системы управления летательного аппарата.
3. Система по п.1, отличающаяся тем, что процессор выполнен с возможностью определения направления выстрела и точки попадания по величине задержки между выходными сигналами блоков акустических и вибропреобразователей, обусловленных одним и тем же выстрелом и попаданием соответственно.
4. Система по п.1, отличающаяся тем, что процессор выполнен в виде блока сигнализации, блока корреляции и двух каналов, каждый из которых образован последовательно соединенными пороговыми блоками, анализаторами частоты, анализаторами задержки и формирователями последовательности, выходы которых соединены с первым и вторым входами блока сигнализации и входами блока корреляции, выход которого подключен к третьему входу блока сигнализации.
| US 2009173788 A1, 09.07.2009 | |||
| JP 9033331 A, 07.02.1997 | |||
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2003 |
|
RU2234739C1 |
| ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2344439C1 |

