Область изобретения
Настоящее изобретение относится, в общем, к бортовым системам безопасности и более конкретно к бортовой системе и способу обнаружения стрелка и определения его местоположения.
Предпосылки создания изобретения
В связи с последними разработками в области технологии оружия и в сочетании с обостряющейся проблемой мирового терроризма усилилась угроза для авиации, участвующей в боевых действиях, в спасательных и гуманитарных миссиях. В частности, террористы используют недорогое, портативное и доступное оружие, например снайперские винтовки, штурмовые винтовки и ручные реактивные гранатометы, против низколетящих летательных аппаратов, например вертолетов и самолетов, во время полета, приземления и взлета. Многие военные летательные аппараты снабжены бортовыми системами для идентификации приближающихся ракет земля-воздух или воздух-воздух и могут обеспечить защиту применением соответствующих контрмер.
Однако снайперские винтовки и штурмовые винтовки больше проблем представляют для гражданских летательных аппаратов, а также для обычных бортовых систем обороны на военных летательных аппаратах. Это оружие легкое и его эксплуатация требует незначительного обучения или обучение не требуется вовсе. Кроме того, снаряды, выпускаемые из этого оружия, намного меньше, чем обычные ракеты. Следовательно, их трудно обнаружить с помощью обычных бортовых систем противоракетной обороны. Кроме того, наносить удар по такому оружию трудно из-за его портативности. Стрелять по летящему вверху самолету может любое количество вооруженных людей, при этом перемещающихся с одного места на другое. Поэтому самолет-мишень должен не только предпринимать ответные меры, но также и идентифицировать, и нейтрализовать источник артиллерийского огня.
Существует несколько систем определения местоположения стрелка с летательного аппарата. Эти системы, как правило, включают датчики, которые регистрируют акустические сигналы только ударной волны, генерированной снарядом. Одна такая бортовая система обнаружения стрелка описана в заявке на патент США №12/220745, содержание которой включено в настоящее описание во всей полноте. Однако когда на самолет выпущен ряд снарядов и/или когда эти снаряды выпущены группой стрелков, определение с помощью этих систем местоположения стрелка (ков) может быть затруднительным. Бортовые системы обнаружения стрелка могут включать инфракрасные (ИК) или ультрафиолетовые (УФ) датчики для обнаружения трассирующего огня приближающегося снаряда, но эти системы имеют существенный недостаток - они не способны обнаруживать боевые патроны общего назначения.
Соответственно, требуется бортовая система для обнаружения стрелка, которая способна определять местоположение одного или нескольких стрелков, выпускающих множество снарядов на летательный аппарат.
Раскрытие изобретения
Системы и способы, представленные в данном описании, включают усовершенствованные системы и способы обнаружения с летательного аппарата источника снарядов, например пуль. Традиционная наземная технология снятия неоднозначности местоположения стрелка с помощью сигналов дульной волны не подходит для таких летательных аппаратов, как вертолет. Это связано с тем, что частотный диапазон сигналов дульной волны накладывается на частотный диапазон акустического шума на вертолете, а акустические шумы на корпусе вертолета заглушают сигналы дульных волн. Таким образом, бортовые системы обнаружения стрелка на летательном аппарате, например вертолете, основаны исключительно на сигналах только ударной волны, которые ассоциируются с проблемой неоднозначности стрелка, то есть, поскольку они основаны на сигналах только ударной волны, эти системы не всегда можно использовать, чтобы легко определить однозначное местоположение стрелка. Это особенно справедливо в случае множества стрелков и/или множества снарядов.
Проблема неоднозначности стрелка заключается в следующем: для данной позиции стрелка и траектории пули существует другая позиция стрелка и траектория пули, для которых сигнал только ударной волны, поступивший на данный набор акустических датчиков, почти идентичен. Два неоднозначных решения - так называемое «истинное» решение и так называемое «ложное» решение или местоположение стрелка - в основном идентичны, если в упрощенной модели сигнал только ударной волны по предположению распространяется через датчики в виде плоской волны. Пуля истинного стрелка создает коническую ударную волну, которая поражает цель в точке. Коническая образующая линия в этой точке имеет ассоциированное направление, тогда как кривизна в плоскости, перпендикулярной этой линии, имеет ассоциированную величину. Ложное местоположение стрелка - это точка, из которой выстрел поразил бы цель в той же точке контакта, образуя идентичную коническую образующую линию, имеющую идентичную кривизну. Таким образом, каждое из местоположений истинного и ложного стрелка дает в результате идентичные конические ударные волны, которые попадают в цель в одной и той же точке. Одно различие между этими двумя конусами состоит в их изменяющейся кривизне, поскольку плоскость только ударной волны, перпендикулярная линии, удаляется от целевой точки контакта. В частности, радиус кривизны конуса уменьшается, поскольку плоскость удаляется от направления истинного стрелка. Таким образом, способ правильного выбора между местоположениями истинного и ложного стрелка должен правильно определять, в каком направлении радиус кривизны конуса уменьшается или увеличивается. Однако правильно идентифицировать местоположение истинного стрелка таким способом трудно, особенно при наличии шума окружающей среды, или когда на летательный аппарат выпущено множество снарядов, и/или когда эти снаряды выпускаются множеством стрелков. В системах и способах, представленных в данном описании, эти и другие недостатки исключаются.
Системы и способы, представленные в данном описании, предполагают, что по летательному аппарату произведено как минимум два выстрела, например из пулемета произведено много отдельных выстрелов. Эти два выстрела могут производиться из одного и того же орудия или из двух разных орудий. В некоторых примерах осуществления изобретения и местоположения истинного, и местоположения ложного стрелка вычисляются для каждого выстрела. Как правило, местоположения истинного стрелка группируются компактнее, поскольку стрелок физически не может перемещаться на большие расстояния во время выстрела. И наоборот, местоположения ложного стрелка разнесены шире, потому что и движение летательного аппарата, и повороты орудия вызывают перемещение местоположения ложного стрелка. Обычно одно из двух возможных местоположений стрелка (истинное и ложное), установленное для каждого выстрела, расположены ближе к одной точке в пространстве (первая группа), тогда как разброс входящих в эту группу местоположений более широкий относительно другой точки в пространстве (вторая группа). В одном примере осуществления изобретения выбрано правильное местоположение, находящееся в центре группы или «кластере» компактно расположенных местоположений стрелка. В одном примере осуществления изобретения может использоваться алгоритм кластеризации для установления среднего интервала между точками в каждой группе или кластере местоположений стрелка, и центр группы или кластера с меньшим интервалом может использоваться для установления местоположения истинного стрелка.
Более конкретно, в одном аспекте изобретение относится к бортовой системе обнаружения стрелка для определения местоположения стрелка на основании сигналов только ударной волны, ассоциированных с рядом снарядов, выпущенных на летательный аппарат. Система включает ряд датчиков, разнесенных на поверхности корпуса летательного аппарата. Датчики конфигурированы для приема сигналов, указывающих на одну или несколько характеристик ударной волны снаряда, то есть сигналы только ударной волны. Каждый из принятых сигналов только ударной волны может соответствовать потенциально неоднозначным решениям для местоположения стрелка. Система также включает как минимум один процессор. Данный как минимум один процессор связан с множеством датчиков и конфигурирован для анализа полученных сигналов только ударной волны, вычисления набора неоднозначных решений для местоположения стрелка, кластеризации набора неоднозначных решений и определения однозначного местоположения стрелка на основании кластеризации. Однозначное решение может затем выводиться на устройство вывода, которое связано с указанным как минимум одним процессором. Устройство вывода может включать как минимум одно из следующих устройств - дисплей, индикатор на лобовом стекле (ИЛС), нашлемный индикатор, внутреннее переговорное устройство, радио и наушники.
В некоторых примерах осуществления изобретения анализ сигналов может включать измерение как минимум начальной части сигналов. Анализ сигналов, кроме того, может включать определение на основании измеренной начальной части сигналов разности времен прихода сигнала (TDOA-РВП). В некоторых примерах осуществления изобретения анализ сигналов включает определение на основании времен прихода сигнала (ов) только ударной волны на датчики как минимум угла прихода, радиуса кривизны или пространственного градиента радиуса кривизны ударной волны. Пространственный градиент радиуса кривизны может использоваться для однозначного определения местоположения источника снаряда.
В некоторых примерах осуществления изобретения как минимум один процессор принимает данные от бортовой авионики. Данные из бортовой электронной системы могут включать как минимум температуру, пространственное положение, высоту и путевую скорость.
В некоторых примерах осуществления изобретения кластеризация набора неоднозначных решений включает как минимум один процессор, конфигурированный для определения набора компактно расположенных неоднозначных решений, ассоциированных как минимум с одним истинным стрелком, и набора широко разнесенных неоднозначных решений, ассоциированных как минимум с одним ложным стрелком. В некоторых примерах осуществления изобретения кластеризация набора неоднозначных решений включает как минимум один процессор, конфигурированный для компоновки кластера вокруг набора компактно расположенных неоднозначных решений. Компактно расположенные неоднозначные решения ассоциированы с однозначным местоположением стрелка. В некоторых примерах осуществления изобретения подбор кластера включает наличие как минимум одного процессора, конфигурированного для выбора центра кластера для набора компактно расположенных неоднозначных решений. В некоторых примерах осуществления изобретения кластер представляет собой эллипс. В некоторых примерах осуществления изобретения подбор кластера включает определение подбора как минимум в виде квадратов для кластера, охватывающего набор компактно расположенных неоднозначных решений. В некоторых примерах осуществления изобретения указанный как минимум один процессор конфигурирован для выбора центра кластера как однозначное местоположение стрелка.
В некоторых примерах осуществления изобретения система, кроме того, включает как минимум один процессор, конфигурированный для определения, что как минимум два стрелка ассоциированы с полученными сигналами только ударной волны. Как минимум один процессор может вычислять соответствующие наборы неоднозначных решений для каждого соответствующего местоположения стрелка и определять как минимум два однозначных местоположения стрелка, которые ассоциированы с каждым из указанных как минимум двух стрелков.
В некоторых примерах осуществления изобретения вычисление набора неоднозначных решений включает наличие как минимум одного процессора, конфигурированного для вычисления TDOA на основании начальных частей каждого полученного сигнала только ударной волны для каждой пары датчиков из множества датчиков, определение азимута и высоты для каждой соответствующей плоскости распространяющейся ударной волны, определение точки максимального сближения (СРА) для каждой соответствующей траектории снаряда, а также определение набора неоднозначных местоположений стрелка. Набор неоднозначных решений определяется на основании как минимум частично вычисленных TDOA, азимута и высоты для плоскости приближающейся ударной волны, а также СРА для соответствующей траектории снаряда. В некоторых примерах осуществления изобретения такое определение включает использование генетического алгоритма. Генетический алгоритм может использовать ряд значений как минимум для трех из вычисленных TDOA, азимута и высоты для плоскости приближающейся ударной волны, СРА для соответствующей траектории снаряда, числа Маха снаряда и угла между СРА для соответствующей траектории снаряда и нормалью к соответствующей плоскости ударной волны.
В другом аспекте изобретение относится к бортовой системе обнаружения стрелка для определения как минимум двух местоположений стрелка как минимум для двух стрелков. Определение основано на сигналах только ударной волны, ассоциированных с множеством снарядов, выпущенных по летательному аппарату. Система включает множество датчиков, разнесенных на поверхности корпуса летательного аппарата. Датчики конфигурированы для приема сигналов только ударной волны, а сигналы только ударной волны указывают на потенциально неоднозначные решения, соответствующие как минимум двум местоположениям стрелка. Система также включает как минимум один процессор, связанный с множеством датчиков. Как минимум один процессор конфигурирован для определения, что как минимум два стрелка ассоциированы с принятыми сигналами только ударной волны. Указанный как минимум один процессор также конфигурирован для вычисления соответствующих наборов неоднозначных решений для каждого соответствующего местоположения стрелка и определения как минимум двух однозначных местоположений стрелка, ассоциированных с этими как минимум двумя стрелками. Упомянутый как минимум один процессор связан также с устройством выхода, с которым связаны как минимум два однозначных местоположения стрелка.
В некоторых примерах осуществления изобретения определение как минимум двух стрелков, ассоциированных с принятыми сигналами только ударной волны, включает анализ каждого принятого соответствующего сигнала только ударной волны и ассоциирование каждого принятого сигнала только ударной волны с каждым соответствующим стрелком из указанных как минимум двух стрелков. В некоторых примерах осуществления изобретения ассоциирование включает вычисление характеристики, ассоциированной с каждым соответствующим стрелком. Характеристикой может быть темп стрельбы, ассоциированный с первым из указанных как минимум двух стрелков, и/или темп стрельбы, ассоциированный со вторым из указанных как минимум двух стрелков. Альтернативно, или дополнительно, характеристикой может быть калибр снаряда, ассоциированный с первым из указанных как минимум двух стрелков, и/или калибр снаряда, ассоциированный со вторым из указанных как минимум двух стрелков.
В некоторых примерах осуществления изобретения указанный как минимум один процессор включает ряд процессоров. В этих примерах осуществления изобретения первый процессор из указанного ряда процессоров может быть конфигурирован для вычисления набора неоднозначных решений для местоположения первого стрелка, а второй процессор из указанного ряда процессоров может быть конфигурирован для вычисления набора неоднозначных решений для местоположения второго стрелка.
В некоторых примерах осуществления изобретения как минимум один процессор конфигурирован для кластеризации соответствующих наборов неоднозначных решений и для определения однозначных местоположений стрелка на основании кластеризации.
В некоторых примерах осуществления изобретения вычисление набора неоднозначных решений включает наличие как минимум одного процессора, конфигурированного для вычисления TDOA, исходя из начальных частей каждого принятого сигнала только ударной волны для каждой пары датчиков из множества датчиков, определение азимута и высоты для каждой соответствующей плоскости приближающейся ударной волны, определение СРА для каждой соответствующей траектории снаряда, вычисление как минимум одного показателя темпа (ов) стрельбы и калибра (ов) снаряда, соответствующих указанным как минимум двум стрелкам, и определение набора неоднозначных местоположений стрелка. Набор неоднозначных решений определяется на основании как минимум частично вычисленных TDOA, азимута и высоты для плоскости приближающейся ударной волны, СРА для соответствующей траектории снаряда и как минимум одного из вычисленных темпов стрельбы и калибра (ов) снаряда. В некоторых примерах осуществления изобретения такое определение включает использование генетического алгоритма. Генетический алгоритм может использовать ряд значений как минимум для трех из вычисленных TDOA, азимута и высоты для плоскости приближающейся ударной волны, СРА для соответствующей траектории снаряда, числа Маха снаряда и угла между СРА для соответствующей траектории снаряда и нормалью к соответствующей плоскости ударной волны.
В третьем аспекте изобретение относится к способу определения местоположения стрелка на основании сигналов только ударной волны, ассоциированных с множеством снарядов, выпущенных по летательному аппарату. Способ включает прием сигналов только ударной волны, анализ принятых сигналов только ударной волны, вычисление набора неоднозначных решений для местоположения стрелка, кластеризацию набора неоднозначных решений, определение однозначного местоположения стрелка на основании кластеризации и вывод однозначного местоположения стрелка на устройство вывода. Сигналы только ударной волны соответствуют потенциально неоднозначным решениям для местоположения стрелка.
В некоторых примерах осуществления изобретения способ также включает определение, что как минимум два стрелка ассоциированы с принятыми сигналами только ударной волны, вычисление соответствующих наборов неоднозначных решений для каждого соответствующего местоположения стрелка и определение как минимум двух однозначных местоположений стрелка, ассоциированных с каждым из указанных как минимум двух стрелков.
В четвертом аспекте изобретение относится к способу определения как минимум двух местоположений стрелка как минимум для двух стрелков на основании сигналов только ударной волны, ассоциированных с множеством снарядов, выпущенных по летательному аппарату. Способ включает прием сигналов только ударной волны, определение, что как минимум два стрелка ассоциированы с принятыми сигналами только ударной волны, вычисление соответствующих наборов неоднозначных решений для каждого соответствующего местоположения стрелка, определение как минимум двух однозначных местоположений стрелка, ассоциированных с указанными как минимум двумя стрелками, и вывод указанных как минимум двух однозначных местоположений стрелка на устройство вывода.
В некоторых примерах осуществления изобретения способ, кроме того, включает определение, что как минимум два стрелка ассоциированы с принятыми сигналами только ударной волны, путем анализа каждого принятого соответствующего сигнала только ударной волны, и ассоциирование каждого принятого сигнала только ударной волны с каждым соответствующим стрелком из указанных как минимум двух стрелков.
В некоторых примерах осуществления изобретения способ, кроме того, включает кластеризацию соответствующих наборов неоднозначных решений и определение однозначных местоположений стрелка на основании кластеризации.
Краткое описание чертежей
На следующих фигурах представлено изображение конкретных иллюстративных примеров осуществления изобретения, на которых одинаковые элементы имеют одинаковые идентификационные номера. Изображенные примеры осуществления изобретения представлены не в масштабе, их следует понимать как иллюстрацию изобретения и никоим образом не как ограничительные.
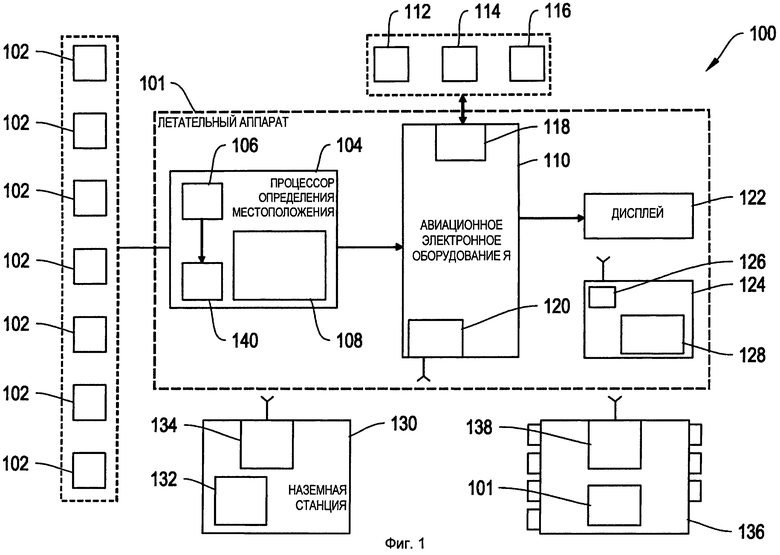
Фигура 1 - блок-схема, изображающая систему обнаружения на летательном аппарате для определения местоположения стрелка, в соответствии с иллюстративным примером осуществления изобретения;
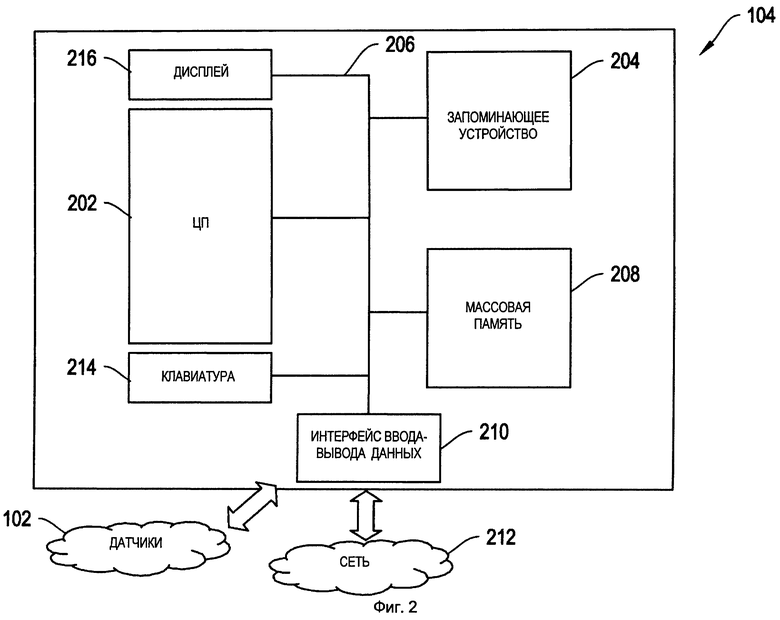
Фигура 2 - блок-схема, изображающая физические компоненты компьютерной системы, в соответствии с иллюстративным примером осуществления изобретения;
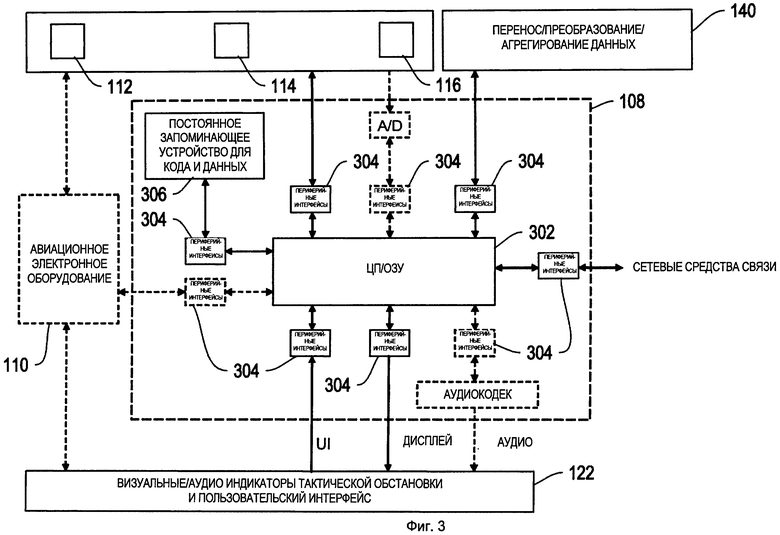
Фигура 3 - более подробная блок-схема, изображающая физические компоненты компьютерной системы, представленной на Фигуре 2, в соответствии с иллюстративным примером осуществления изобретения;
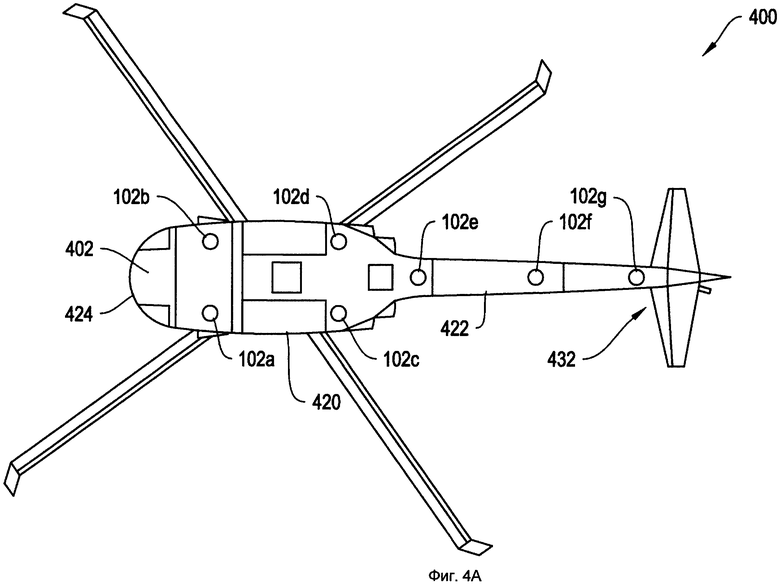
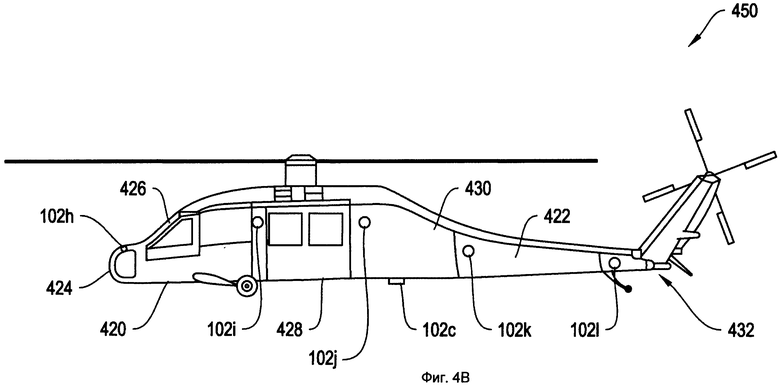
на Фигурах 4А и 4В изображен вид снизу и сбоку соответственно вертолета с расположенным на фюзеляже множеством датчиков в соответствии с иллюстративным примером осуществления изобретения;
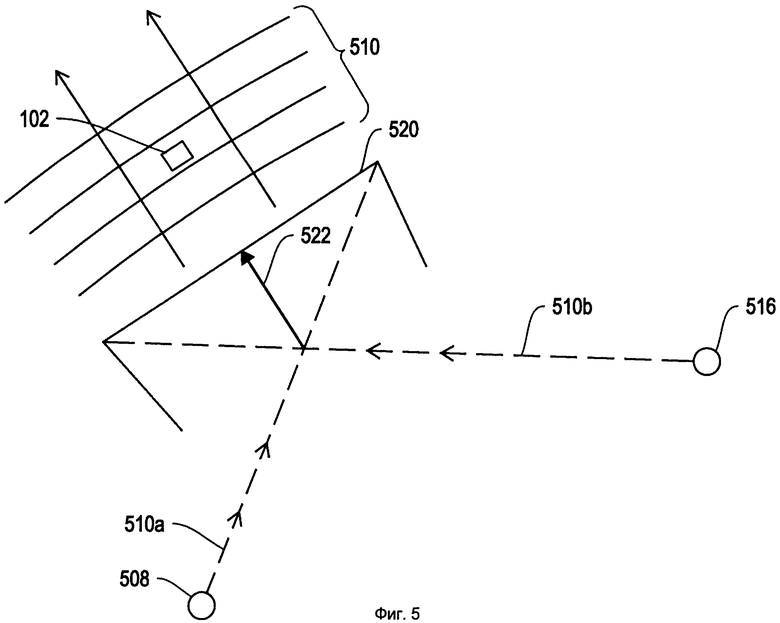
на Фигуре 5 схематично изображена неоднозначность, характерная для систем обнаружения, использующих сигналы только ударной волны от приближающегося снаряда;
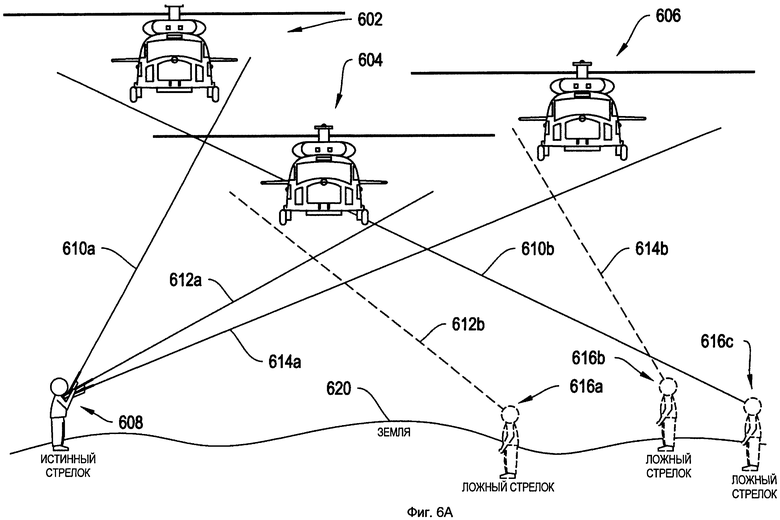
Фигура 6А - иллюстрация стрелка, выпускающего множество снарядов по движущемуся вертолету, в соответствии с иллюстративным примером осуществления изобретения;
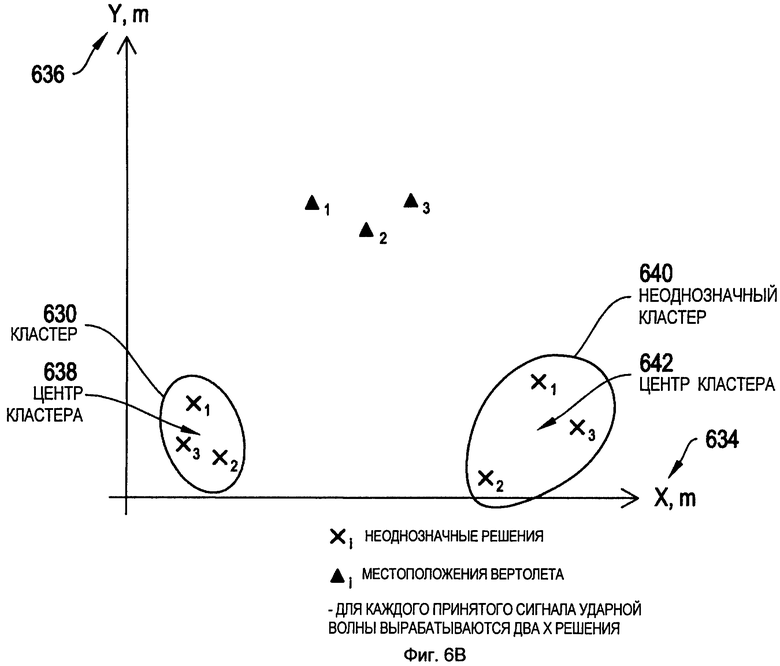
Фигура 6В - иллюстрация кластеров неоднозначных местоположений стрелка, соответствующих стрелку на Фигуре 6А, в соответствии с иллюстративным примером осуществления изобретения;
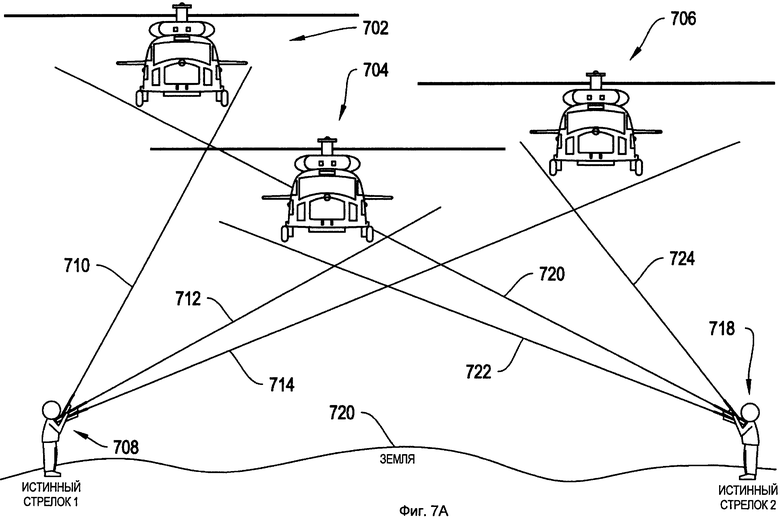
Фигура 7А - иллюстрация двух стрелков, выпускающих множество снарядов по движущемуся вертолету, в соответствии с иллюстративным примером осуществления изобретения;
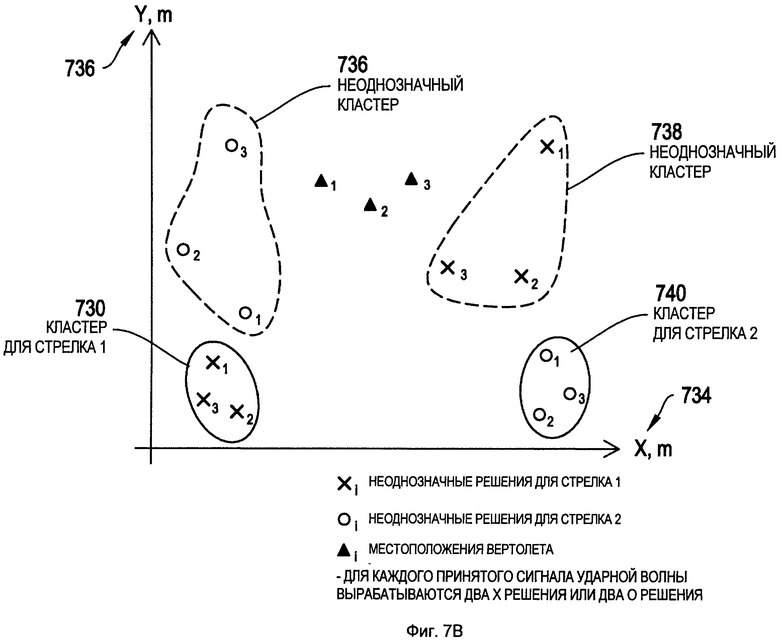
Фигура 7В - иллюстрация кластеров неоднозначных местоположений стрелка, соответствующих двум стрелкам на Фигуре 7А, в соответствии с иллюстративным примером осуществления изобретения; и
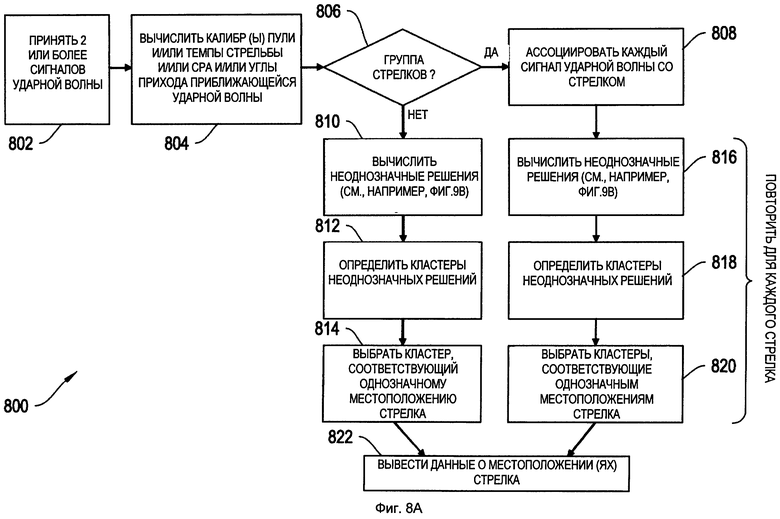
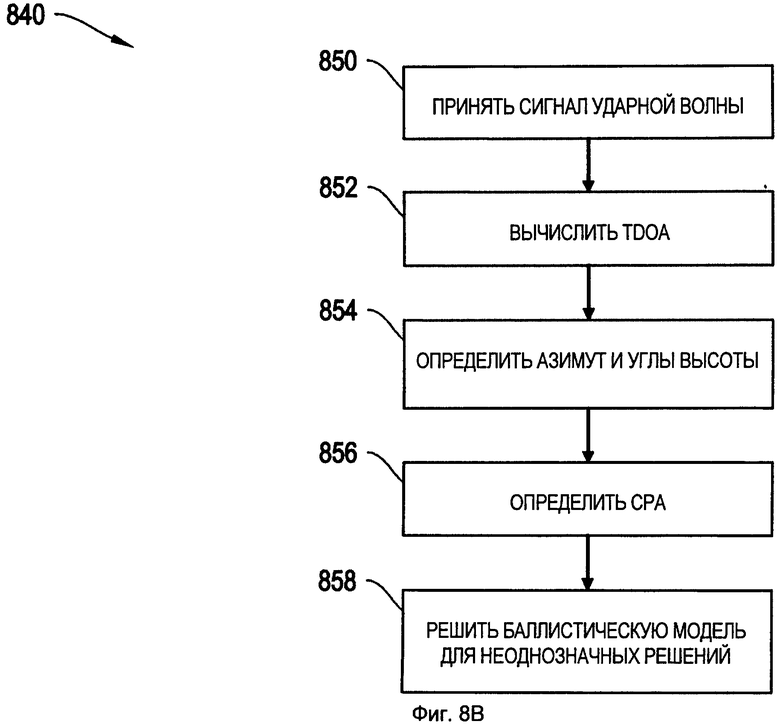
Фигуры 8А и 8В - принципиальные схемы иллюстративных процессов для определения однозначного местоположения стрелка, в соответствии с иллюстративным примером осуществления изобретения.
Подробное описание изобретения
Для полного понимания изобретения ниже будет приведено описание некоторых иллюстративных примеров осуществления изобретения, включая аппарат отображения и его составляющие компоненты. Однако специалистам в данной области очевидно, что описанный аппарат может быть приспособлен и изменен соответственно применению, и что системы и способы, описанные здесь, могут найти другие подходящие применения, и что подобные другие дополнения и модификации не будут выходить за пределы объема изобретения.
На Фигуре 1 представлена блок-схема, изображающая бортовую систему обнаружения 100, предназначенную для определения местоположения стрелка, в соответствии с иллюстративным примером осуществления изобретения. Система обнаружения 100 включает множество акустических датчиков 102, расположенных на корпусе летательного аппарата 101. Датчики 102 связаны с процессором определения местоположения 104 и авиационным электронным оборудованием (авионикой) 110, которая может находиться внутри корпуса летательного аппарата 101. Процессор определения местоположения может включать один или несколько процессоров, конфигурированных для выполнения одного или нескольких способов, описанных здесь. Процессор определения местоположения 104 включает различные функциональные приложения и/или аппаратные субкомпоненты для управления датчиками 102 и обработки данных, поступающих от датчиков 102. Некоторые функциональные приложения включают приложение для поверки датчиков и их контроля 106, обеспечивающее регулирование датчиков 102 и получение данных от них, и приложение определения местоположения стрелка 108 для расчета местоположения стрелка. Процессор местоположения 104, кроме того, включает компонент переноса/преобразования/агрегирования данных 140, предназначенный для агрегирования данных датчика, преобразования данных в соответствующий формат и передачи данных в приложение определения местоположения стрелка 108. Авиационное электронное оборудование 110 включает ряд электронных схем и процессоров для управления, контроля и регулирования различных характеристик летательного аппарата. Авиационное электронное оборудование 110 включает, помимо всего прочего, схему связи 120, обеспечивающую связь с наземной станцией 130 или с другим летательным аппаратом 136. Авиационное электронное оборудование 110 также включает блок контроля датчиков параметров окружающей среды 118 для передачи и сбора данных от одного или нескольких датчиков параметров окружающей среды 112, 114 и 116. В некоторых примерах осуществления изобретения датчики 112, 114, 116 могут быть напрямую соединены с процессором местоположения 104. Датчики параметров окружающей среды, включая температурные датчики 112, датчики пространственного положения летательного аппарата, датчики векторной скорости 114 и другие датчики 116, например альтиметры среднего уровня моря (MSL) и/или альтиметры высоты над уровнем земли = истинной высоты (AGL), блоки глобальной навигационной системы (GPS), блоки инерционной навигационной системы (INS), a также датчики путевой скорости, расположены на наружной поверхности фюзеляжа и/или внутри.
Авиационное электронное оборудование 110 связано с индикатором на лобовом стекле 122, предоставляя пилоту, помимо всего прочего, соответствующую информацию о местоположении стрелка. Авиационное электронное оборудование 110 может быть также дистанционно связано со шлемными электронными средствами пилота 124, включая нашлемный индикатор 128, через шлемную схему связи 126. Авиационное электронное оборудование 110, кроме того, связано с одной или несколькими наземными станциями 130. В некоторых примерах осуществления изобретения авиационное электронное оборудование 110 передает информацию об обнаружении выстрела или местоположении стрелка пилоту путем оповещений по средствам аудио/внутренней связи. Авиационное электронное оборудование 110 может также помогать процессору определения местоположения 104 в определении местоположения стрелка, предоставляя соответствующие данные, собранные от датчиков 112, 114 и 116, и другую информацию, полученную с наземной станции 130, от системы обнаружения наземной станции 132, с другого летательного аппарата 136 или от пилота.
Когда снаряд, например пуля, движущийся со сверхзвуковой скоростью, приближается к системе обнаружения 100, снаряд генерирует акустическую ударную волну. Поверхность ударной волны представляет собой типично расширяющуюся коническую поверхность, ось которой совпадает с траекторией пули. Поверхность ударной волны также называют конусом Маха. Чтобы рассчитать местоположение стрелка, на основании времен прихода, измеренных на множестве датчиков 102, определяются угол прихода, радиус кривизны и пространственный градиент радиуса кривизны расширяющейся конической поверхности.
В одном примере осуществления изобретения во время работы датчики 102, чьи корпусные координаты (позиции на фюзеляже) точно известны, принимают один или несколько акустических сигналов, характерных для ударной волны, генерированной пулей или другим снарядом. Множество датчиков принимают сигнал только ударной волны в разное время и генерируют электрические сигналы в ответ на давление ударной волны. Приложение определения местоположения стрелка 108 в процессоре 104 определяет «разность времен прихода сигнала» (TDOA) на основании начальной части сигналов только ударной волны. В одном примере осуществления изобретения приложение местоположения стрелка 108 определяет TDOA, обозначая датчик, который первым встретил ударную волну, как эталонный датчик, и определяя время прихода ударной волны на других датчиках относительно эталонного датчика. Приложение определения местоположения стрелка 108 может определить направление (азимут и угол высоты) источника пули на основании, среди всего прочего, информации о TDOA и корпусных координатах датчиков 102. Более подробное описание данного процесса с TDOA по определению местоположения стрелка представлено в патенте США №7126877, включенном в настоящее описание в качестве ссылки полностью. Приложение местоположения стрелка 108 может быть создано и реализовано в процессоре 104 с помощью аппаратных схем или языков программного обеспечения, включая, но не ограничиваясь этим, С, С++ и JAVA.
В определенных ситуациях вычисление угла прихода, относительно корпуса, конической поверхности, которая первой достигает датчиков 102, может дать два возможных решения (часто называемые неоднозначными углами или неоднозначными решениями). Неоднозначные углы или решения будут описаны более подробно ниже со ссылкой на Фигуру 4. Радиус кривизны конической поверхности на датчиках 102 может определять и расстояние до траектории, и направление к траектории. Неоднозначность между двумя возможными решениями может быть устранена путем определения и оценки градиента радиуса кривизны конуса.
Чтобы точно определить эти свойства ударной волны (угол прихода, радиус кривизны и пространственный градиент радиуса кривизны расширяющейся конической поверхности) и сделать выбор между двумя возможными неоднозначными траекториями, необходимо выполнить очень точные измерения. Как описано в заявке США №12/220745, система обнаружения 100 предпочтительно включает достаточное число датчиков, стратегически размещенных на поверхности корпуса летательного аппарата таким образом, что большую часть ударных волн, или даже все ударные волны, приводящих к потенциально неоднозначным решениям по определению местоположения, обнаруживают предпочтительно семь, и как минимум пять, датчиков 102.
Фигура 2 - общая блок-схема, изображающая физические компоненты процессора определения местоположения 104, в соответствии с иллюстративным примером осуществления изобретения. Типичный процессор определения местоположения 104 включает центральный процессор (ЦП) 202, запоминающее устройство 204 и соединительную шину 206. ЦП 202 может включать один микропроцессор или группу микропроцессоров для конфигурирования процессора определения местоположения 104 в виде мультипроцессорной системы. В некоторых примерах осуществления изобретения как минимум один процессор конфигурирован для определения местоположения стрелка. В некоторых примерах осуществления изобретения группа процессоров конфигурирована для определения местоположения стрелка. Например, при наличии двух стрелков может использоваться один процессор для обработки сигналов только ударной волны, поступивших от одного из стрелков, а другой процессор может использоваться для обработки сигналов только ударной волны, поступивших от другого стрелка. Специалистам в данной области ясно, что для процессора определения местоположения 104 допустимо множество однопроцессорных или мультипроцессорных конфигураций.
Запоминающее устройство 204 иллюстративно включает оперативное запоминающее устройство и постоянное запоминающее устройство. Компьютер 110, кроме того, включает устройство массовой памяти 208, имеющее, например, различные дисковые накопители, ленточные накопители, флэш-память, и т.д. Оперативная память 204 также включает динамическое ЗУ с произвольной выборкой (ДЗУПВ-DRAM) и высокоскоростную кэш-память. При эксплуатации оперативное запоминающее устройство 204 хранит как минимум части инструкций и данных, предназначенных для выполнения центральным процессором 202.
Устройство массовой памяти 208 может включать один или несколько магнитных дисков, или ленточных носителей, или накопителей на оптических дисках для хранения данных и инструкций по использованию центральным процессором 202. По крайней мере в одном компоненте системы массовой памяти 208, предпочтительно в виде дискового накопителя или ленточного накопителя, хранится база данных, которая используется для обработки сигналов, измеренных датчиками 102. Система массовой памяти 208 может также включать один или несколько накопителей для различных портативных носителей, таких как дискета, постоянная память на компакт-дисках (CD-ROM), DVD или адаптер энергонезависимой памяти на интегральных схемах (то есть PC-MCIA адаптер) для ввода данных и программ в микропроцессор определения местоположения 104 и вывода данных и программ из него.
Процессор определения местоположения 104 может также включать один или несколько интерфейсов ввода/вывода для средств связи, показанных в виде примера как интерфейс 210 для передачи данных через сеть 212. Интерфейсом данных 210 может быть модем, сетевая плата, последовательный порт, шинный адаптер или любой другой подходящий механизм передачи данных для связи с одной или несколькими системами на борту летательного аппарата или на земле. Для представления функций компьютера 104 в соответствии с Фигурой 1 интерфейс данных 210 обеспечивает относительно высокоскоростную связь с сетью 212, например бортовой интрасетью авиационного электронного оборудования, или наземными сетями, например Интернетом. Линия связи с сетью 212 может быть, например, оптической, проводной или беспроводной (например, через спутниковую или сотовую сеть). И наоборот, процессор определения местоположения 104 может включать универсальную ЭВМ или систему главного компьютера другого типа, способного обеспечивать связь через сеть 212.
Процессор местоположения 104, кроме того, включает соответствующие порты ввода-вывода или использует соединительную шину 206 для взаимосвязи с авиационным электронным оборудованием 110, местный дисплей 216 и клавиатуру 214 или подобные средства, которые служат в качестве местного пользовательского интерфейса для целей программирования и/или поиска данных. И наоборот, персонал может взаимодействовать с процессором 104 для контроля и/или программирования системы с удаленных терминальных устройств через сеть 212.
Процессор определения местоположения 104 может выполнять множество прикладных программ и хранить соответствующие данные в базе данных в системе массовой памяти 208. Одно или несколько таких приложений способны осуществлять прием и отправку сообщений для обеспечения работы в качестве сервера, для реализации функций сервера, касающихся измерения акустических сигналов, и определения местонахождения стрелка системой 100, изображенной на Фигуре 1.
В некоторых примерах осуществления изобретения центральный процессор 202 включает схему аналого-цифрового преобразователя и/или цифроаналогового преобразователя. В таких примерах осуществления изобретения схема аналого-цифрового преобразователя преобразует аналоговые сигналы, принятые датчиками, в цифровые сигналы для дальнейшей обработки процессором местоположения 104.
Содержащиеся в процессоре определения местоположения 104 компоненты - это компоненты, обычно присутствующие в авиационных компьютерных системах, авиационном электронном оборудовании в кабине экипажа, боевом авиационном электронном оборудовании, универсальных компьютерных системах, используемых как серверы, рабочие станции, персональные компьютеры, сетевые терминалы, и т.п. Фактически эти компоненты представляют широкую категорию известных в данной области узлов вычислительной машины. Определенные аспекты изобретения могут относиться к элементам программного обеспечения, например рабочей программе и базе данных для серверных функций системы обнаружения 100.
Фигура 3 - более подробная блок-схема, изображающая физические компоненты компьютерной системы, представленной на Фигуре 2, в соответствии с иллюстративным примером осуществления изобретения. В частности, процессор определения местоположения 104 включает блок ЦП/ОЗУ 302 и множество интегрированных и/или присоединенных периферийных интерфейсов («PI») 704. Периферийный интерфейс 304 может служить в качестве канала связи как минимум между двумя из перечисленных ниже: блок переноса данных 140, датчики 112,114 и 116, хранилище данных 306, дисплеи 122, включая нашлемный индикатор, аудиосредства и сетевые средства связи. Периферийный интерфейс 304 может содержать соответствующий интерфейс, включающий как минимум один из последовательных портов RS232, RS432, RS422 и RS485. Периферийный интерфейс 304 может также содержать как минимум одну из универсальных последовательных шин (USB), параллельный порт, 1-квадратичную С шину, 1-квадратичную S шину, ARINC 429 шину, MIL-STD-1553 шину, Ethernet, LVDS. Периферийный интерфейс 304 может также быть полностью изготовленным по заказу для специального применения.
Процессор определения местоположения 104 может быть, кроме того, напрямую связан с датчиком 102. На расположение датчиков могут влиять определенные математические ограничения, как описано ниже, и оно может также ограничиваться физической структурой летательного аппарата 101. Теоретически, предпочтительно было бы разместить датчики 102 в основном на одинаковом расстоянии друг от друга на корпусе летательного аппарата, создавая, таким образом, равномерно распределенную систему 100. Однако такое размещение может быть трудноосуществимо из-за физических ограничений, налагаемых на летательные аппараты. Наоборот, математические ограничения, налагаемые на систему 100, например предпочтительное разнесение датчиков, можно успешно приспособить для летательного аппарата ввиду его физического размера.
На Фигурах 4А и 4В изображен вид снизу 400 и сбоку 450 соответственно вертолета 420 с расположенным на фюзеляже множеством датчиков 102 в соответствии с иллюстративным примером осуществления изобретения. Как описано в заявке США №12/220745, для ясности, но не в качестве ограничения, одно иллюстративное размещение датчиков 102 в системе 100 может быть представлено в настоящем описании в контексте расположения датчиков 102 на вертолете. Однако следует понимать, что принципы настоящего описания можно применить к другому летательному аппарату. Например, принципы данного описания могут быть применены к самолетам, где датчики размещаются на основании ограничений, налагаемых физической структурой самолета. В более широком смысле, описанные здесь системы могут использоваться как пригодные и с учетом ограничений, присутствующих в любом летательном аппарате, где требуется установить систему обнаружения 100.
На днище 400 фюзеляжа вертолета 420 расположены семь датчиков 102a-102g, расположенных от носовой зоны 424 до хвостовой зоны 432. Как показано, в зоне под кабиной пилота 426 расположены два датчика 102а и 102b. В зоне под кабиной 428 и двигателем/трансмиссией/топливным баком 530 находятся два датчика 102 с и 102d. Снизу на участке хвостовой балки 422 расположены три датчика 102e, 102f и 102g. При таком расположении как минимум два датчика могут быть отделены друг от друга расстоянием не менее 10 м. Например, датчик 102а или 102b под носовой зоной 424 может быть отделен от датчика 102g под хвостовой балкой 422 расстоянием более, чем приблизительно 10 м. Одно или несколько физических ограничений, имеющихся на днище 400 вертолета 420, могут влиять на размещение датчиков 102a-102g. В некоторых примерах осуществления изобретения днище 400 включает механизм для посадки, например полозья или ниши шасси. Датчики 102a-102g могут быть размещены вокруг этих физических ограничений соответственно. В некоторых примерах осуществления изобретения датчики 102a-102g могут быть установлены на полозьях. В некоторых примерах осуществления изобретения датчики 102a-102g могут быть установлены в любом месте на днище 400 по желанию. В разных местах вдоль днища 400 можно разместить дополнительные датчики.
Верхняя и боковая части 450 фюзеляжа вертолета 420 содержат множество датчиков 102h-1021, расположенных от носовой зоны 424 до хвостовой зоны 432. Датчик 102h расположен на носовой части 424 вертолета 420. Датчик 102i помещен между кокпитом 426 и кабиной 428 вертолета 420. Датчик 102j помещен на двигателе/трансмиссии/топливном баке 430, а датчики 102k и 1021 расположены на хвостовой балке 422. В некоторых примерах осуществления изобретения датчик 102h может быть помещен в любом месте на носовой части 424, включая переднюю часть. При таком размещении как минимум два датчика могут быть отделены друг от друга расстоянием как минимум 10 м. Например, датчик 102h в носовой зоне 424 может быть отделен от датчика 1021 на хвостовой балке 422 расстоянием больше, чем приблизительно 10 м. Одно или несколько физических ограничений, имеющихся на передней и боковой частях 450 вертолета 420, могут влиять на размещение датчиков 102h-1021. В качестве примера сбоку у вертолета 420 может быть множество дверей, окон и отсеков для технического обслуживания. Датчики 102h-1021 могут быть соответственно размещены вокруг этих физических ограничений.
Датчики, подобные датчикам 102h-1021, могут быть размещены на борту, противоположном борту 550 вертолета 520. В одном примере осуществления изобретения вертолет 520 имеет в общей сложности семнадцать датчиков, включая по четыре на правом и левом борту, два впереди на носовой части 524 и семь на днище 500.
В некоторых примерах осуществления изобретения датчики 102 (Фигуры 1, 2, 3, 4А, 4В) включают акустические датчики, например микрофоны. В некоторых примерах осуществления изобретения датчики 102 включают цифровые микрофоны, которые имеют выводы дельта модулированных сигналов, или аналоговые выводы. В таких примерах осуществления изобретения датчики 102 могут включать установленные заподлицо микрофоны диаметром приблизительно 1 см. В таких примерах осуществления изобретения датчики 102 могут включать смонтированные на обтекателе микрофоны, когда обтекатели имеют ветровые стекла и впадины для смещения микрофонов из воздушного потока.
На Фигуре 5 схематично изображена неоднозначность, характерная для систем обнаружения, в которых используется только информация об ударной волне от приближающегося снаряда, которая достигает одного или нескольких датчиков 102, показанных на Фигурах 1, 2, 3, 4А, 4В. Для данной позиции стрелка 508 и траектории пули 510а существует другая позиция стрелка 516 и траектория пули 510b, для которых время прихода (ТОА) на датчик, или TDOA ударной волны на данной набор датчиков, почти идентичное. Два неоднозначных решения - местоположения истинного и ложного стрелка - в основном идентичны, если в упрощенной модели ударная волна 510, по предположению, проходит через датчик 102 как плоская волна 520 или «общий элемент ударной волны», как показано на Фигуре 5. В частности, вектор прихода удара 522 плоской ударной волны 520 одинаковый для каждого из этих двух решений, что делает их неоднозначными решениями. Если разрешение TDOA достаточно высокое, чтобы разрешить кривизну ударной волны, то в отношении двух почти одинаковых решений неоднозначность может быть вообще устранена. При допущении, что измерения TDOA достаточно точные, и принимая во внимание, что множество выстрелов могли быть выполнены одним стрелком, или что множество выстрелов могли быть выполнены как минимум двумя стрелками, процессор определения местоположения 104 может получить градиент кривизны и, таким образом, получить истинное решение для местоположения стрелка и траектории пули путем вычисления комбинации стрелок/траектория, которая минимизирует среднеквадратичный (RMS) остаточную погрешность измеренных и вычисленных значений TDOA ударной волны. Такой способ решения описан в патенте США №7126877, содержание которого включено в настоящее описание во всей полноте. В указанных способах может использоваться подходящая баллистическая модель в соответствии с описанием в этом патенте.
Разнесение и положение датчиков на летательном аппарате важны по отношению к проблеме неоднозначности стрелка. Как упомянуто выше, летательный аппарат может иметь множество датчиков, стратегически размещенных по его фюзеляжу. Неоднозначность определения местоположения стрелка может существовать со всех сторон летательного аппарата, потому что, как отмечалось ранее, для каждого местоположения истинного стрелка существует другое (ложное) местоположение стрелка, которое можно отнести на счет ударной волны, воспринятой датчиками. В зависимости от траектории снаряда относительно летательного аппарата, а также ориентации летательного аппарата относительно уровня земли, ложное местоположение стрелка может быть не наземным, то есть расположено в воздухе выше земли. Чтобы обнаружить наземных стрелков, решения, соответствующие не наземным местоположениям стрелка, можно просто игнорировать. Однако, как описано ниже со ссылкой на Фигуры 6А и 7А, когда один или несколько стрелков находятся под летательным аппаратом и пролетевшие мимо цели снаряды проходят под фюзеляжем летательного аппарата (пролет ниже цели), ложный (ые) стрелок (ки) находится, как правило, на земле. То есть есть два возможных наземных местоположения стрелка - истинное и ложное решение. Как правило, устранить неоднозначность единственного выстрела нельзя, если точка максимального сближения (СРА) ударной волны больше расстояния, которое регулируется интервалом между датчиками, а также флуктуациями времени прихода, вызванными скошенным турбулентным потоком от летательного аппарата, например, вертолета. Это расстояние может быть меньше 60 м, например, 30 м для вертолетов в процессе полета.
Фигуры 6А и 6В относятся к иллюстративным примерам осуществления изобретения, в которых один стрелок выпускает два или более снарядов по летательному аппарату. Фигуры 7А и 7В относятся к иллюстративным примерам осуществления изобретения, в которых два или более стрелков выпускают два или более снарядов по летательному аппарату. Определение однозначного (ых) местоположения (ий) стрелка процессором местоположения 104, показанного на Фигуре 1, в отношении этих примеров осуществления изобретения будет описано ниже. В описаниях Фигур 6А, 6В, 7А и 7В на процессор определения местоположения 104 не всегда дается ссылка как на выполняющий определенные задачи. Тем не менее, следует подразумевать, что процессор местоположения 104, показанный на Фигуре 1, конфигурирован для выполнения взаимосвязей, определений и вычислений, описанных ниже. Фактические вычисления неоднозначных решений относительно местоположения стрелка процессором местоположения 104, показанным на Фигуре 1, будут описаны относительно Фигур 9А и 9В ниже. Снова вернемся к Фигуре 6А и проиллюстрируем, как можно использовать системы и способы, описанные здесь, для определения однозначного местоположения стрелка, когда один стрелок выпускает два или более снарядов по летательному аппарату.
Фигура 6А - иллюстрация истинного стрелка 608, выпускающего множество снарядов (например, пули из винтовки) по движущемуся вертолету с земли 620. На фигуре движущийся вертолет показан в трех позициях, обозначенных как позиции 602, 604 и 606. Истинный стрелок 608 выпускает снаряды по траекториям 610а, 612а, и 614а. Каждая из этих «истинных» траекторий ассоциирована с выстрелами, которые выполнены истинным стрелком 608, и направлена на вертолет, находящийся в позициях 602, 604 и 606 соответственно. В иллюстративных целях эти истинные траектории показаны как пролет ниже цели. Таким образом, для каждой из истинных траекторий существует соответствующая «ложная» траектория, то есть траектория, полученная в результате решения уравнений подходящей баллистической модели, которая соответствует несуществующему или ложному стрелку на земле 620. Например, траектория 610а имеет соответствующую ложную траекторию 610b, траектория 612а имеет соответствующую ложную траекторию 612b, а траектория 614а имеет соответствующую ложную траекторию 614b. Ложные траектории 612b, 614b и 616b соответствуют ложным местоположениям стрелка 616а, 616b и 616с.
Снова ссылаясь на Фигуру 6А, следует отметить, что каждое из ложных местоположений стрелка 616а, 616b и 616с могло бы теоретически соответствовать снарядам, которые ассоциированы с плоскостями ударной волны, в основном подобными плоскостям ударной волны, ассоциированным со снарядами от истинного стрелка 608. Системы и способы, описанные здесь, можно использовать для устранения неоднозначности истинного местоположения стрелка на основании ложного (ых) местоположения (ий) стрелка. Более конкретно, при решении баллистической модели, используя информацию от одного или нескольких сигналов только ударной волны, получен набор неоднозначных решений, более подробное описание которого приведено ниже со ссылкой на Фигуры 9А и 9В. Этот набор неоднозначных решений включает решения, соответствующие местоположению истинного стрелка, и решениям, соответствующим местоположениям ложного стрелка, как показано на Фигуре 6В.
Фигура 6В - график с Х (634) и Y (636) координатами кластеров 630 и 640 неоднозначных местоположений стрелка xi, соответствующих истинному (608) и ложному стрелкам (616а, 616b, 616 с), изображенным на Фигуре 6А. Местоположение движущегося вертолета обозначено треугольниками с нижними индексами, то есть Δ1, Δ2 и Δ3. Каждый принятый сигнал ударной волны в конкретном местоположении вертолета дает два неоднозначных местоположения стрелка. Например, плоскость ударной волны, распространяющаяся в сторону вертолета Δ1, дает два неоднозначных решения x1. Как правило, решения для местоположений истинного стрелка группируются компактнее, потому что истинный стрелок физически не может перемещаться на большие расстояния во время выстрела. И наоборот, решения для местоположения ложного стрелка разнесены шире, потому что и движение летательного аппарата, и повороты орудия (например, винтовки) вызывают перемещение местоположения ложного стрелка. Это происходит на иллюстрации на Фигуре 6В, где группа или кластер 630 содержит неоднозначные решения x1, x2 и x3, разнесенные компактно (обычно ассоциированы с истинным стрелком), тогда как группа или кластер 640 содержит неоднозначные решения x1, x2 и x3, которые разнесены широко (обычно ассоциированы с ложным стрелком).
Устранить неоднозначность кластеров неоднозначных решений можно путем определения, какой из кластеров соответствует однозначному местоположению или местоположению истинного стрелка. Для такого определения и/или поиска наборов кластеров может быть применен любой подходящий алгоритм кластеризации. Например, алгоритм кластеризации может использоваться для идентификации всех допустимых кластеров неоднозначных решений, а также кластера с наиболее компактно разнесенными решениями, ассоциированными с истинным стрелком. В некоторых примерах осуществления изобретения ожидаемый угол между кластерами решений истинного и ложного стрелка может использоваться, чтобы определить, какие наборы неоднозначных решений допустимы. В зависимости от числа Маха для пули, выпущенной в летательный аппарат, ожидаемый угол может быть в диапазоне между 80 и 130 градусами, то есть угол между кластером, соответствующим истинному стрелку, и кластером, соответствующим ложному стрелку, находится приблизительно в диапазоне между 80 и 130 градусами. В некоторых примерах осуществления изобретения для определения, какие наборы неоднозначных решений допустимы, можно также использовать ожидаемый радиус действия стрелка (основанный, например, на числе Маха пули). Например, если ожидаемый радиус действия стрелка составляет 100 м, любой кластер неоднозначных решений, соответствующий радиусу действия стрелка больше 150 м или меньше 50 м, не будет допустимым кластером. В некоторых примерах осуществления изобретения, используя комбинацию ожидаемого угла между кластерами истинных и ложных решений и/или ожидаемый радиус действия стрелка, можно определить два допустимых кластера неоднозначных решений - один кластер, соответствующий местоположению истинного стрелка, а другой кластер, соответствующий местоположению ложного стрелка.
В одном примере осуществления изобретения местоположение однозначного или истинного стрелка выбирается как местоположение стрелка, ассоциированное с набором наиболее компактно разнесенных неоднозначных решений для местоположения стрелка. В некоторых примерах осуществления изобретения может использоваться алгоритм кластеризации для поиска среднего расстояния между решениями в каждом кластере местоположений стрелка, а центр кластера с наименьшим средним расстоянием определяется как местоположение истинного стрелка. Специалистам в данной области ясно, что может быть выполнено много подобных вычислений характеристик кластера, можно использовать много подобных правил для определения, какой кластер соответствует местоположению истинного стрелка. На Фигуре 6В показаны два таких кластера 630 и 640 с центрами 638 и 642 соответственно. В иллюстративных целях на Фигуре 6В показаны только два кластера, однако, как описано выше, может использоваться любой подходящий алгоритм кластеризации для определения всех допустимых кластеров неоднозначных решений. В некоторых примерах осуществления изобретения кластер представляет собой эллипс, и для поиска местоположения истинного стрелка может использоваться алгоритм кластеризации подбором эллипса вокруг наборов неоднозначных решений. В некоторых примерах осуществления изобретения выбирается эллипс, который является наименьшим, например в пересчете на площадь или объем, как ассоциированный с местоположением истинного стрелка, а центр эллипса выбирается как местоположение истинного стрелка.
Снова со ссылкой на Фигуру 7А проиллюстрируем, как системы и способы, описанные здесь, можно использовать для определения однозначного местоположения стрелка, когда как минимум два стрелка выпускают один или несколько снарядов по летательному аппарату.
Фигура 7А представляет собой иллюстрацию двух стрелков 708 и 718, выпускающих множество снарядов (например, пули из винтовок) по движущемуся вертолету с земли 720. Движущийся вертолет показан в трех позициях на фигуре, обозначенных как положения 702, 704, и 706. Истинный стрелок 1 708 выпускает снаряды по траекториям 710, 712 и 714. Истинный стрелок 2 718 выпускает снаряды по траекториям 722, 720 и 724. Выстрелы направлены на вертолет в позициях 702, 704 и 706 соответственно. В иллюстративных целях эти траектории истинного стрелка изображены как пролет ниже цели. Как показано в примере осуществления изобретения со ссылкой на Фигуру 6А, каждая из этих истинных траекторий 710, 712, 714, 722, 720 и 724 имеет соответствующую ложную траектория. Для упрощения иллюстрации на Фигуре 7А ложные траектории для истинного стрелка 1 708 и истинного стрелка 2 718 не показаны. Однако, как описано ниже более подробно со ссылкой на Фигуры 9А и 9В, при решении баллистической модели, используя информацию от одного или более сигналов только ударной волны, принятых от снарядов, выпущенных истинным стрелком 1 708 или истинным стрелком 2 718, получены наборы неоднозначных решений. Каждый из этих наборов неоднозначных решений включает решения, соответствующие местоположениям истинных стрелков, и решениям, соответствующим местоположениям ложных стрелков, как показано на иллюстрации Фигуры 7В.
Фигура 7В - график с Х (734) и Y (736) координатами кластеров 730, 736, 738 и 740 неоднозначных местоположений стрелка, соответствующих местоположениям истинного и ложного стрелка из примера осуществления изобретения на Фигуре 7А. Снова ссылаясь на Фигуры 7А и 7В, неоднозначные решения, соответствующие истинному стрелку 1 708, обозначены как xi, а решения, соответствующие истинному стрелку 2 718, обозначены как oi. Как и в случае на Фигуре 6В, местоположение движущегося вертолета обозначено треугольниками с нижними индексами, то есть Δ1, Δ2 и Δ3. Каждый принятый сигнал ударной волны от каждого истинного стрелка в конкретном местоположении вертолета дает два неоднозначных местоположения стрелка - либо два x1 решения, либо два oi решения. При определении этих решений, как описано ниже относительно Фигур 9А и 9В, каждый из принятых сигналов только ударной волны ассоциирован с каждым из истинных стрелков. В некоторых примерах осуществления изобретения такое определение выполняется путем расчета калибра пули, ассоциированной с каждым принятым сигналом только ударной волны. Дополнительно, или альтернативно, можно вычислить темп стрельбы, ассоциированный с каждым стрелком, и этот темп стрельбы можно использовать, чтобы ассоциировать каждый принятый сигнал только ударной волны с каждым из истинных стрелков. Темп стрельбы можно вычислить на основании, хотя бы частично, частоты, на которой датчики на вертолете принимают сигналы только ударной волны. Таким образом, вычисленный калибр (ы) пули и/или темп (ы) стрельбы обеспечивают однозначное соответствие между стрелками и сигналами только ударной волны. Когда такое соответствие обеспечено, можно вычислить набор неоднозначных решений и можно провести ассоциацию между этим набором решений и одним из указанных двух стрелков. Например, плоскость ударной волны, распространяющаяся в сторону вертолета Δ1 от истинного стрелка 1 708, дает в результате вычисление двух неоднозначных решений x1, тогда как плоскость ударной волны, распространяющаяся в сторону вертолета Δ1 от истинного стрелка 2718, дает в результате вычисление двух неоднозначных решений o1.
Снова со ссылкой на Фигуры 7А и 7В, решения для каждого местоположения истинных стрелков группируются компактнее, потому что каждый истинный стрелок физически не может перемещаться на большие расстояния при стрельбе очередью. Например, кластер 730 содержит неоднозначные решения x1, x2 и x3, соответствующие истинному стрелку 1 708, которые разнесены компактно. Кластер 740 содержит неоднозначные решения o1, o2 и o3, соответствующие истинному стрелку 2 718, которые также разнесены компактно. Наоборот, кластеры 736 и 738 содержат решения, которые разнесены шире, чем кластеры 730 и 740 соответственно. Эти кластеры вмещают решения для ложного стрелка, которые разнесены шире, потому что и движение летательного аппарата, и повороты орудия (например, винтовки), как правило, вызывают перемещение местоположения ложного стрелка. В иллюстративных целях на Фигуре 7В показаны только четыре кластера решений, однако специалистам в данной области очевидно, что можно определить еще несколько допустимых кластеров неоднозначных решений. В одном примере осуществления изобретения допустимый кластер - это кластер, который соответствует набору неоднозначных решений, ассоциированных с конкретным стрелком, и таким образом, с конкретным набором принятых сигналов только ударной волны. Следовательно, кластер, содержащий набор неоднозначных решений, которые ассоциированы с двумя разными стрелками, например, двумя «о» решениями и одним «х» решением, не являются допустимыми кластерами.
В некоторых примерах осуществления изобретения ожидаемый угол между каждым из кластеров решений для истинных и ложных стрелков может использоваться для определения, какие наборы неоднозначных решений допустимы. В зависимости от числа Маха для пули, направленной на летательный аппарат, ожидаемый угол может быть в диапазоне между 80 и 130 градусами, то есть угол между кластером, соответствующим истинному (ым) стрелку (ам), и кластером, соответствующим ложному (ым) стрелку (ам), находится приблизительно в диапазоне между 80 и 130 градусами. В некоторых примерах осуществления изобретения для определения, какие наборы неоднозначных решений допустимы, можно также использовать ожидаемый (ые) радиус (ы) действия стрелка (основанный (ые), например, на числе Маха пули). Например, если ожидаемый радиус действия стрелка составляет 100 м, любые кластеры неоднозначных решений, соответствующие тому стрелку, который имеет радиус действия больше 150 м или меньше 50 м, не будет допустимым кластером. В некоторых примерах осуществления изобретения, используя комбинацию ожидаемых углов между кластерами истинных и ложных решений и/или ожидаемых радиусов действия стрелка, можно определить как минимум четыре допустимых кластера неоднозначных решений - как минимум два кластера, соответствующие местоположениям истинного стрелка, и как минимум два кластера, соответствующие местоположениям ложного стрелка.
Для каждого стрелка неоднозначность кластеров неоднозначных решений может быть устранена путем определения, какой кластер соответствует однозначному решению для местоположения стрелка. Для такого определения и/или поиска наборов допустимых кластеров неоднозначных решений может быть применен любой подходящий алгоритм кластеризации. Например, алгоритм кластеризации может использоваться для идентификации всех допустимых кластеров неоднозначных решений, а также кластера с наиболее компактно разнесенными решениями. В одном примере осуществления изобретения однозначные местоположения стрелка выбираются как местоположения стрелка, ассоциированные с наборами наиболее компактно разнесенных неоднозначных решений для каждого местоположения истинного стрелка. В некоторых примерах осуществления изобретения может использоваться алгоритм кластеризации для поиска среднего расстояния между решениями в каждом кластере решений, а центр кластера с наименьшим средним расстоянием определяется как местоположение истинного стрелка. Специалистам в данной области ясно, что можно выполнить много подобных вычислений характеристик кластера и можно применить много подобных правил для определения, какой кластер соответствует местоположению истинного стрелка. В одном примере осуществления изобретения однозначные местоположения стрелка для каждого истинного стрелка 1 708 и истинного стрелка 2 718 выбраны как местоположения стрелка, ассоциированные с наборами компактно разнесенных кластеров неоднозначных решений, то есть кластеры 730 и 740.
На Фигурах 8А и 8В изображены блок-схемы иллюстративных процессов 800 и 840. Блок-схемы 800 и 840 касаются систем и способов, описанных здесь, для определения однозначных местоположений стрелка, когда по летательному аппарату множество снарядов выпущено одним или несколькими стрелками. Такие определения были рассмотрены выше относительно Фигур 6А и 7А. Следует понимать, что каждый этап на блок-схемах 800 и 840 может быть выполнен системой 100 (Фигура 1) путем выполнения инструкций, находящихся в процессоре определения местоположения 104 (Фигура 1). Процессор определения местоположения 104 может быть конфигурирован как однопроцессорная или мультипроцессорная система.
Снова со ссылкой на Фигуры 1, 8А и 8В, в одном примере осуществления изобретения в процессор определения местоположения 104 поступают два или более сигналов только ударной волны (802). Процессор определения местоположения 104 затем вычисляет калибр (ов) пули и/или темпа (ов) стрельбы, соответствующих двум или более сигналам только ударной волны (804). Процессор определения местоположения 104 может также вычислить траекторию СРА и/или угол прихода приближающейся ударной волны, соответствующий сигналам только ударной волны. В некоторых примерах осуществления изобретения вычисленный калибр (ы) пули и/или темп (ы) стрельбы используются для определения, соответствуют сигналы ударной волны одному стрелку или множеству стрелков (806).
В некоторых примерах осуществления изобретения как минимум два из следующих показателей - вычисленный (ые) калибр (ы) пули, вычисленный темп (ы) стрельбы, вычисленная (ые) точка (и) максимального сближения [СРА], а также вычисленный (ые) угол (углы) прихода ударной волны - используются для определения, соответствуют сигналы ударной волны одному стрелку или множеству стрелков (806). В некоторых примерах осуществления изобретения угол прихода приближающейся ударной волны вычисляется на основании TDOA только ударной волны с использованием формирователя диаграммы направленности плоской волны. Этот формирователь луча вычисляет нормальную (N) волну для сигнала только приближающейся ударной волны. Следует отметить, что формирователь луча обрабатывает порядки величины TDOA только ударной волны быстрее, чем решатель для неоднозначных решений, который описан на этапе 910 далее. СРА и калибр пули оцениваются на основании пиковой амплитуды ударной волны и крутизны волны. Эти оценки основаны на двух теоретических наблюдениях: крутизна волны N не зависит от калибра пули, а зависит только от СРА и числа Маха пули; амплитуда волны N зависит от СРА, калибра и числа Маха пули. Кроме того, число Маха пули связано с СРА и амплитудой волны N приблизительно таким образом, что можно оценить СРА на основании крутизны волны N и впоследствии использовать оцененную точку максимального сближения [СРА] для оценки калибра пули на основании амплитуды волны N.
В некоторых примерах осуществления изобретения процессор определения местоположения 104 может вычислить калибр пули, используя как минимум одно из следующих показателей -максимальная величина принятого сигнала только ударной волны, длительность начальной части принятого сигнала только ударной волны и величина начальной части принятого сигнала только ударной волны. Например, максимальная величина принятого сигнала только ударной волны может соответствовать конкретному калибру пули или длительность начальной части сигнала может соответствовать конкретному калибру пули.
В некоторых примерах осуществления изобретения темп стрельбы ассоциируется процессором определения местоположения 104 с конкретным стрелком на основании, хотя бы частично, известных показателях темпа стрельбы боевого оружия, например снайперских винтовок и штурмовых винтовок. Некоторые виды боевого оружия имеют известные максимальные темпы стрельбы, известные минимальные темпы стрельбы или известные фиксированные темпы стрельбы. Процессор определения местоположения 104 может вычислить темп стрельбы, ассоциированный с группой принятых сигналов только ударной волны, анализируя группу принятых сигналов только ударной волны. Например, если время прихода каждого принятого сигнала только ударной волны на датчики 102 соответствует равномерно распределенным интервалам времени, то процессор определения местоположения 104 может определить, что эти сигналы только ударной волны соответствуют известному темпу стрельбы боевого оружия, и процессор определения местоположения 104 выдаст решение, что существует только один стрелок, ассоциированный с принятыми сигналами только ударной волны. Напротив, если время прихода каждого принятого сигнала только ударной волны на датчики 102 соответствует неравномерно распределенным интервалам времени, то процессор определения местоположения 104 может определить, что эти сигналы только ударной волны соответствуют как минимум двум разным известным темпам стрельбы как минимум двух разных единиц боевого оружия. В этом случае каждый принятый сигнал только ударной волны, соответствующий одному и тому же стрелку, может быть обработан одним и тем же процессором в рамках процессора определения местоположения 104.
Таким образом, процессор определения местоположения 104 определяет наличие только одного стрелка или двух или более стрелков на основании принятых сигналов только ударной волны. В одном примере осуществления изобретения процессор определения местоположения 104 ассоциирует стрелка с каждым принятым сигналом только ударной волны, используя вычисленные параметры, описанные выше. Например, если каждый принятый сигнал только ударной волны соответствует другому калибру пули, и/или темпу стрельбы, и/или другим значениям СРА траектории, и/или углам прихода приближающейся ударной волны, то процессор определения местоположения 104 определит, что есть как минимум два разных стрелка, ассоциированных как минимум с двумя разными калибрами пули, и/или темпами стрельбы, и/или значениями СРА траектории, и/или углами прихода приближающейся ударной волны.
Если процессор определения местоположения 104 определяет, что есть только один стрелок, то вычисляются наборы неоднозначных решений для принятых сигналов только ударной волны. При желании, процессор определения местоположения 104 может быть конфигурирован как мультипроцессорная система таким образом, что вычисления и определения для каждого принятого сигнала только ударной волны выполняются другим процессором. Такое вычисление может выполняться с использованием процесса 840, иллюстрация которого приведена на Фигуре 8В. В частности, процессор определения местоположения 104 может принимать сигнал (850) ударной волны и выполнять анализ как минимум начальной части принятого сигнала ударной волны, чтобы вычислить значения TDOA для каждой пары датчиков 102, которые приняли сигнал (852) ударной волны. Процессор определения местоположения 104 может затем вычислить азимут и углы высоты плоскости ударной волны, приближающейся к датчикам 102 (854). Эти углы могут использоваться для определения траектории снаряда, ассоциированной с принятыми сигналами только ударной волны. После этого процессор определения местоположения 104 вычисляет точку максимального приближения (СРА) траектории снаряда, ассоциированной со значениями TDOA, и азимутом, и углами высоты (856). В некоторых примерах осуществления изобретения точка (и) максимального приближения, вычисленная (ые) на этапе 904, может (ут) использоваться на этапе 856. В некоторых примерах осуществления изобретения вычисленная СРА может быть кратчайшим расстоянием от нормального вектора плоскости ударной волны до датчиков 102.
Вычисленные значения TDOA, угол азимута, угол высоты, информация о СРА могут использоваться для решения уравнений, представляющих баллистическую модель для траектории снаряда и местоположения стрелка (858). Решение таких уравнений и подходящей баллистической модели описаны в патенте США №7126877. В некоторых примерах осуществления изобретения для определения траектории снаряда и местоположения стрелка может использоваться вычислительный алгоритм, например метод градиентного поиска (например, алгоритм Левенберга-Маркварта). В некоторых примерах осуществления изобретения вычислительный алгоритм представляет собой генетический алгоритм, который вычисляет решения уравнений подходящей баллистической модели. В этих примерах осуществления изобретения процессор определения местоположения 104 в качестве входных данных или «затравки» для генетического алгоритма использует подходящие диапазоны для азимутального угла (например, вычисленный азимутальный угол плюс случайный угол с нулевым средним значением и стандартным отклонением 30 градусов), угол высоты (например, вычисленный азимутальный угол плюс случайный угол с нулевым средним значением и стандартным отклонением 30 градусов), СРА (например, вычисленная СРА плюс случайный угол с нулевым средним значением и стандартным отклонением 10 градусов), число Маха снаряда (например, равномерно распределенное между приблизительно 1,1 и приблизительно 2,6) и угол прихода (например, равномерно распределенный между 0 и 360 градусами) плоскости ударной волны на датчики 102.
После вычисления наборов неоднозначных решений, соответствующих принятым сигналам только ударной волны, процессор определения местоположения 104 определяет кластеры неоднозначных решений (812). Как описано выше относительно Фигуры 6В, кластеризация неоднозначных решений может включать определение наборов компактно и широко разнесенных неоднозначных решений для местоположения стрелка. Процессор определения местоположения 104 затем определяет, какой кластер соответствует однозначному местоположению стрелка (814). В некоторых примерах осуществления изобретения процессор определения местоположения 104 может использовать алгоритм кластеризации для поиска среднего расстояния между решениями в каждом таком кластере решений для местоположения стрелка, и центры кластера с наименьшим средним расстоянием определяются как местоположения истинного стрелка. Специалистам в данной области ясно, что известно много алгоритмов кластеризации, которые можно использовать для определения кластеров компактно и широко разнесенных неоднозначных решений и для определения, какой из кластеров соответствует однозначному местоположению стрелка.
С другой стороны, если процессор определения местоположения 104 определяет, что присутствует несколько стрелков (806), тогда каждый принятый сигнал ударной волны сначала ассоциируется со стрелком (808). Для каждого из этих стрелков процессор определения местоположения 104 вычисляет наборы неоднозначных решений, соответствующих каждому из принятых сигналов только ударной волны (816). По желанию, процессор определения местоположения 104 может быть конфигурирован как мультипроцессорная система таким образом, что вычисления и определения для каждого стрелка выполняются другим процессором. Альтернативно, или дополнительно, процессор определения местоположения 104 может быть конфигурирован как мультипроцессорная система таким образом, что вычисления и определения для каждого принятого сигнала ударной волны выполняются другим процессором. Это вычисление может выполняться с помощью процесса 840, который иллюстрируется на Фигуре 8В, как описано выше. После вычисления наборов неоднозначных решений, соответствующих принятым сигналам только ударной волны, процессор определения местоположения 104 определяет кластеры неоднозначных решений (818). Как описано выше относительно Фигур 6В и 7В, кластеризация наборов неоднозначных решений включает определение наборов неоднозначных решений для местоположения стрелка. Процессор определения местоположения 104 затем определяет, какой из кластеров соответствует однозначным местоположениям стрелка (820).
После определения однозначного (ых) местоположения (и) стрелка процессор определения местоположения 104 выводит однозначное (ые) местоположение (я) стрелка, соответствующее (ие) одному или нескольким стрелкам, на устройство вывода. Устройство вывода может включать как минимум одно из следующих устройств: дисплей, индикатор на лобовом стекле (ИЛС), нашлемный индикатор, внутреннее переговорное устройство, радио и наушники и т.д. Местоположение стрелка может быть выведено в любом аудиовизуальном формате, например речевое сообщение с заявлением о местоположении (ях) стрелка, визуальное сообщение на нашлемном индикаторе пилота и т.д.
Как правило, описанные здесь способы можно выполнять на базе обычной платформы обработки данных, например компьютера, совместимого с персональным компьютером фирмы IBM, управляющим операционными системами Windows, автоматизированного рабочего места SUN, управляющего операционной системой UNIX, или другого эквивалентного персонального компьютера, или автоматизированного рабочего места. Альтернативно, система обработки данных может содержать специализированную систему обработки, которая включает встроенный программируемый блок обработки данных.
Способы, описанные здесь, могут быть также реализованы как компонент программного обеспечения, работающий на базе обычной системы обработки данных, например автоматизированное рабочее место UNIX. В таком примере осуществления изобретения способы могут быть осуществлены в виде компьютерной программы, составленной на любом из нескольких языков, известных специалистам в данной области, например (но не ограничиваясь этим), С, C++, FORTRAN, Java или BASIC. Способы могут быть также выполнены на основании общедоступных кластеров процессоров, например Western Scientific Linux кластеров, которые способны обеспечить параллельное выполнение всех или некоторых из этапов настоящего процесса.
Способ в соответствии с настоящим изобретением может быть выполнен либо аппаратными средствами, программными средствами, либо любой их комбинацией, известными в настоящее время в данной области. В частности, предлагаемый способ может быть выполнен с помощью программных средств, встроенных программ или микропрограмм на компьютере или компьютерах любого типа, включая ранее существовавшее или уже установленные средства обработки данных, полученных от авиационного электронного оборудования, способные поддержать любые или все функции процессора местоположения. Кроме того, программное обеспечение, с помощью которого осуществляется настоящее изобретение, может включать машинные команды в любой форме (например, исходная программа, объектная программа, интерпретируемый код, и т.д.), записанные на любом машиночитаемом носителе (например, ПЗУ, ЗУПВ, магнитные носители, перфорированная лента или карта, компакт-диск (CD) в любой форме, DVD, и т.д.). Соответственно, системы и способы, описанные здесь, не ограничиваются какой-либо конкретной платформой, если особо не оговаривается в настоящем описании изобретения.
Изобретение может быть осуществлено в других специальных формах в пределах объема или существенных особенностей изобретения. Поэтому предшествующие примеры осуществления изобретения следует считать во всех отношениях иллюстративными, а не ограничивающими изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ СРЕДСТВ ОГНЕВОГО ПОРАЖЕНИЯ ПО АКУСТИЧЕСКИМ КОЛЕБАНИЯМ НА ДАЛЬНОСТИ ОТ 500 М | 2023 |
|
RU2810603C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СВЕРХЗВУКОВОГО СНАРЯДА | 2005 |
|
RU2358275C2 |
| СПОСОБ ОЦЕНКИ ДАЛЬНОСТИ ДО ТОЧКИ ВЫСТРЕЛА | 2008 |
|
RU2494336C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СВЕРХЗВУКОВОГО СНАРЯДА | 2005 |
|
RU2408025C2 |
| Способ и устройство для позиционирования в системе беспроводной связи | 2023 |
|
RU2805220C1 |
| СПОСОБ КАЛИБРОВКИ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ДАТЧИКОВ В СИСТЕМЕ ОБНАРУЖЕНИЯ ВЫСТРЕЛА | 2005 |
|
RU2347234C2 |
| АКУСТИЧЕСКАЯ СИСТЕМА ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434278C1 |
| СПОСОБЫ И ОТНОСЯЩИЕСЯ К НИМ СИСТЕМЫ ПОСТРОЕНИЯ МОДЕЛЕЙ И ПРОГНОЗИРОВАНИЯ ОПЕРАЦИОННЫХ РЕЗУЛЬТАТОВ ОПЕРАЦИИ БУРЕНИЯ | 2013 |
|
RU2600497C2 |
| УКАЗАНИЕ ПАРАМЕТРОВ ВЕТРА | 2013 |
|
RU2571439C1 |
| СПОСОБ МОНИТОРИНГА ТЕРРИТОРИИ С ПОМОЩЬЮ БПЛА | 2023 |
|
RU2828511C1 |
Изобретение относится к бортовой системе обнаружения стрелка, содержащей множество датчиков, прикрепленных к корпусу летательного аппарата, например вертолета. Датчики предназначены для приема сигналы только ударной волны. Принятые сигналы анализируются с целью определения однозначного местоположения стрелка. Анализ может включать измерение времени прихода ударных волн от снарядов на каждый из датчиков, определение разности времен прихода сигнала на датчики, вычисление набора неоднозначных решений, соответствующих стрелку, и кластеризацию этого набора решений для определения однозначного местоположения стрелка. Указанный кластер представляет собой эллипс. Технический результат заключается в обеспечении возможности повышения степени однозначности определения истинного местоположения стрелка. 2 н. и 2 з.п. ф-лы, 8 ил.
1. Бортовая система для определения местоположения стрелка на основании сигналов только ударной волны, ассоциированных с множеством снарядов, выпущенных по летательному аппарату, включающая:
множество датчиков, расположенных на поверхности корпуса летательного аппарата, конфигурированных для приема сигналов только ударной волны, в которой сигналы ударной волны соответствуют потенциально неоднозначным решениям для определения местоположения стрелка;
как минимум один процессор, связанный с множеством указанных датчиков, конфигурированный для
анализа принятых сигналов только ударной волны;
вычисления набора неоднозначных решений для определения местоположения стрелка;
кластеризации набора неоднозначных решений, при этом кластер представляет собой эллипс; и
определения однозначного местоположения стрелка на основании кластеризации; и
устройство вывода, связанное с указанным как минимум одним процессором для вывода данных об однозначном местоположении стрелка.
2. Система по п.1, в которой указанный как минимум один процессор для кластеризации набора неоднозначных решений конфигурирован для определения набора компактно расположенных неоднозначных решений и набор широко расположенных неоднозначных решений.
3. Система по п.2, в которой как минимум один процессор конфигурирован для
подбора кластера вокруг набора компактно расположенных решений, в котором компактно расположенные решения ассоциированы с однозначным местоположением стрелка.
4. Система по п.3, в которой как минимум один процессор конфигурирован для выбора центра кластера для набора компактно расположенных решений.
5. Система по п.3, в которой подбор кластера осуществляется методом наименьших квадратов для кластера, охватывающего набор компактно расположенных неоднозначных решений.
6. Система по п.3, в которой как минимум один процессор конфигурирован для выбора центра кластера как однозначного местоположения стрелка.
7. Система по п.1, дополнительно включающая как минимум один процессор, конфигурированный для
определения, что как минимум два стрелка ассоциированы с принятыми сигналами только ударной волны;
вычисления соответствующих наборов неоднозначных решений для каждого соответствующего местоположения стрелка; и
определения как минимум двух однозначных местоположений стрелка, ассоциированных с каждым из указанных как минимум двух стрелков.
8. Система по п.1, в которой как минимум один процессор для вычисления набора неоднозначных решений конфигурирован для
вычисления времен прихода (TDOA) на основании начальных частей каждого принятого сигнала только ударной волны для каждой пары датчиков из множества датчиков,
определения азимута и высоты для каждой соответствующей плоскости приближающейся ударной волны;
определения точки максимального сближения (СРА) для каждой соответствующей траектории снаряда; и
определения набора неоднозначных местоположений стрелка на основании, хотя бы частично, вычисленных значений TDOA, азимута и высоты для плоскости приближающейся ударной волны, и СРА для соответствующей траектории снаряда.
9. Система по п.8, в которой определение набора неоднозначных местоположений стрелка включает использование генетического алгоритма.
10. Система по п.9, в которой генетический алгоритм использует ряд значений как минимум для трех из вычисленных TDOA, азимута и высоты для плоскости приближающейся ударной волны, СРА для соответствующей траектории снаряда, числа Маха снаряда и угла между СРА для соответствующей траектории снаряда и нормалью к соответствующей плоскости ударной волны.
11. Способ определения местоположения стрелка на основании сигналов только ударной волны, ассоциированных с множеством снарядов, выпущенных по летательному аппарату, включающий:
прием сигналов только ударной волны, которые соответствуют потенциально неоднозначным решениям для определения местоположения стрелка;
использование как минимум одного процессора, анализирующего принятые сигналы только ударной волны, вычисляющего набор неоднозначных решений для определения местоположения стрелка, выполняющего кластеризацию набора неоднозначных решений, при этом кластер представляет собой эллипс, определяющего однозначное местоположение стрелка на основании кластеризации и выводящего однозначное решение на устройство вывода.
12. Способ по п.11, в котором кластеризация набора неоднозначных решений дополнительно включает определение набора компактно расположенных неоднозначных решений и набора широко разнесенных неоднозначных решений.
13. Способ по п.12, в котором кластеризация набора неоднозначных решений дополнительно включает подбор кластера вокруг набора компактно расположенных неоднозначных решений, в котором компактно расположенные неоднозначные решения ассоциированы с однозначным местоположением стрелка.
14. Способ по п.12, в котором подбор кластера включает выбор центра кластера для набора компактно расположенных неоднозначных решений.
15. Способ по п.12, в котором подбор кластера осуществляется методом наименьших квадратов для кластера, охватывающего набор компактно расположенных неоднозначных решений.
16. Способ по п.15, включающий выбор центра кластера как однозначное местоположение стрелка.
17. Способ по п.11, дополнительно включающий
определение, что как минимум два стрелка ассоциированы с принятыми сигналами только ударной волны;
вычисление соответствующих наборов неоднозначных решений для каждого соответствующего местоположения стрелка; и
определение как минимум двух однозначных местоположений стрелка, ассоциированных с каждым из указанных как минимум двух стрелков.
18. Способ по п.11, в котором вычисление набора неоднозначных решений включает
вычисление разности времен прихода (TDOA) на основании начальных частей каждого принятого сигнала только ударной волны для каждой пары датчиков из множества датчиков;
определение азимута и высоты для каждой соответствующей плоскости приближающейся ударной волны;
определение точки максимального сближения (СРА) для каждой соответствующей траектории снаряда; и
определение набора неоднозначных местоположений стрелка на основании, хотя бы частично, вычисленных значений TDOA, азимута и высоты для плоскости приближающейся ударной волны, и СРА для соответствующей траектории снаряда.
19. Способ по п.18, в котором определение набора неоднозначных местоположений стрелка включает использование генетического алгоритма.
20. Способ по п.19, в котором генетический алгоритм использует ряд значений как минимум для трех из вычисленных TDOA, азимута и высоты для плоскости приближающейся ударной волны, СРА для соответствующей траектории снаряда, числа Маха снаряда и угла между СРА для соответствующей траектории снаряда и нормалью к соответствующей плоскости ударной волны.
| US 5241518 A, 31.08.1993, | |||
| WO 2006096208 A2, 14.09.2006 | |||
| US 2006044941 A1, 02.03.2006, | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТРЕЛКА НА МЕСТНОСТИ | 2005 |
|
RU2285272C1 |

