Изобретение относится к военной технике, а именно к системам управления вращающимися ракетами, и может быть использовано, например, для угловой стабилизации реактивных снарядов систем залпового огня, которая, как правило, осуществляется на активном участке траектории полета в течение нескольких секунд после схода снаряда с направляющей.
Известно устройство угловой стабилизации вращающейся ракеты по патенту РФ №2126129, F42B 10/00, 15/01, опубл. 10.02.1999 г, бюл. №4, которое содержит датчик угловых отклонений с чувствительным элементом, оснащенным постоянным магнитом и связанным с электроприводом, сигнальную и опорную обмотки, блок преобразования сигналов, исполнительный орган.
Такое устройство позволяет осуществить стабилизацию углового положения продольной оси реактивного снаряда.
Однако из-за существующих в датчике перекрестных связей и конечного быстродействия исполнительного органа в системе появляются динамические ошибки, приводящие к возникновению спиральных движений в переходных процессах, что ограничивает повышение точности стабилизации снаряда.
Задачей данного технического решения являлось повышение точности стабилизации ракеты за счет снижения инструментальных ошибок преобразования сигнала датчика угловых отклонений.
Общими признаками с предлагаемым авторами устройством угловой стабилизации является наличие в устройстве-аналоге датчика угловых отклонений с чувствительным элементом, оснащенным постоянным магнитом и связанным с электроприводом, сигнальной и опорной обмотками, блока преобразования сигналов и исполнительного органа.
Наиболее близким по технической сути и достигаемому техническому результату является устройство угловой стабилизации реактивного снаряда по патенту РФ №2181875, F42B 10/00, 15/01, опубл. 27.04.2002 г, бюл. №12, принятое авторами за прототип, содержащее датчик угловых отклонений с чувствительным элементом, выполненным в виде сферического поплавка с постоянным магнитом, размещенным в сферической камере, заполненной жидкостью и механически связанной с приводом, с сигнальной и двумя опорными обмотками, смещенными на 90° по отношению друг к другу, блок преобразования сигналов, входы которого соединены с сигнальной и опорными обмотками, а выход - с газодинамическим исполнительным органом, угол установки осей сопел которого относительно опорных обмоток определяется по формуле φ=ωτ+arc·tg·Кпс, где φ - угол установки осей сопел относительно опорных обмоток, ω - частота вращения снаряда, τ - время запаздывания газодинамического исполнительного органа, Кпс - коэффициент перекрестной связи датчика угловых отклонений.
К недостаткам прототипа необходимо отнести следующее.
Для питания электропривода вращения сферической камеры и блока преобразования сигналов при полете снаряда система угловой стабилизации снабжается бортовой батареей постоянного тока, например термохимической, требующей дополнительной электрической связи ее пирозапала с наземной аппаратурой для задействования батареи, а также бортового устройства защиты цепи пирозапала от токов наводки и статического электричества, что усложняет конструкцию устройства.
Кроме того, после задействования бортовой батареи перед пуском не представляется возможности провести задержку пуска, а также дальнейшего использования реактивного снаряда с системой угловой стабилизации при отмене пуска.
Другой недостаток заключается в том, что момент инерции, а следовательно, и кинетический момент ротора со сферической камерой внутри, имеющего наружную сферическую поверхность (см., например, Андрейченко К.П. Динамика поплавковых гироскопов и акселерометров. - М.: Машиностроение, 1987, стр.7, рис.1.3), меньше, чем у ротора в форме цилиндра со сферической камерой того же диаметра внутри. Однако ротор в форме цилиндра имеет большой момент аэродинамического сопротивления, на что расходуется до 60% мощности привода вращения (см., например, Гироскопические системы: Элементы гироскопических приборов: Учебник для вузов по спец. «Гироскопические приборы и устройства» / Е.А.Никитин, С.А.Шестов, В.А.Матвеев: под ред. Д.С.Пельпора. - 2-е изд. перераб. и доп. - М.: Высш. шк., 1988, стр.62-65), что требует повышенной мощности для разгона двигателя до рабочей угловой скорости и уменьшает время выбега.
Задачей прототипа являлось повышение точности стабилизации снаряда за счет снижения динамических ошибок системы и повышения эффективности управления.
Общими признаками с предлагаемым устройством угловой стабилизации снаряда является наличие в прототипе датчика угловых отклонений с чувствительным элементом в виде оснащенного постоянным магнитом сферического поплавка, размещенного в сферической камере, заполненной жидкостью и механически связанной с приводом, сигнальной и опорных обмоток, блока преобразования сигналов и исполнительного органа.
В отличие от прототипа в предлагаемом авторами устройстве угловой стабилизации вращающегося реактивного снаряда в датчике угловых отклонений сферическая камера выполнена внутри ротора, имеющего форму цилиндра с торцевыми поверхностями в виде усеченного конуса, диаметр основания которого равен диаметру цилиндра, диаметр усеченного конуса и его высота определяются из соотношений d/D=0,4-0,6 и h/D=0,3-0,5, где d - диаметр усеченного конуса, h - высота усеченного конуса, D - диаметр ротора, при этом привод выполнен в виде электродвигателя постоянного тока с возбуждением от постоянного магнита, размещенного внутри полого немагнитного якоря, и электрически связан с блоком преобразования сигналов.
В частном случае, т.е. в конкретных формах выполнения, изобретение характеризуется тем, что вращение полого немагнитного якоря противоположно направлению вращения датчика угловых отклонений вокруг его продольной оси.
Именно это позволяет сделать вывод о наличии причинно-следственной связи между совокупностью существенных признаков заявляемого технического решения и достигаемым техническим результатом.
Указанные признаки, отличительные от прототипа, и, на которые распространяется испрашиваемый объем правовой защиты, во всех случаях достаточны.
Задачей предлагаемого изобретения является упрощение конструкции устройства, повышение эксплуатационной надежности и расширение функциональных возможностей.
Указанный технический результат при осуществлении изобретения достигается тем, что в устройстве угловой стабилизации вращающегося реактивного снаряда сферическая камера датчика угловых отклонений выполнена внутри ротора, имеющего форму цилиндра с торцевыми поверхностями в виде усеченного конуса, диаметр основания которого равен диаметру цилиндра, диаметр усеченного конуса и его высота определяются из соотношений d/D=0,4-0,6 и h/D=0,3-0,5, где d - диаметр усеченного конуса, h - высота усеченного конуса, D - диаметр ротора, при этом привод выполнен в виде электродвигателя постоянного тока с возбуждением от постоянного магнита, размещенного внутри полого немагнитного якоря, и электрически связан с блоком преобразования сигналов, а вращение полого немагнитного якоря противоположно направлению вращения датчика угловых отклонений вокруг его продольной оси.
Новая совокупность конструктивных элементов, а также наличие связей между ними позволяют, в частности, за счет выполнения:
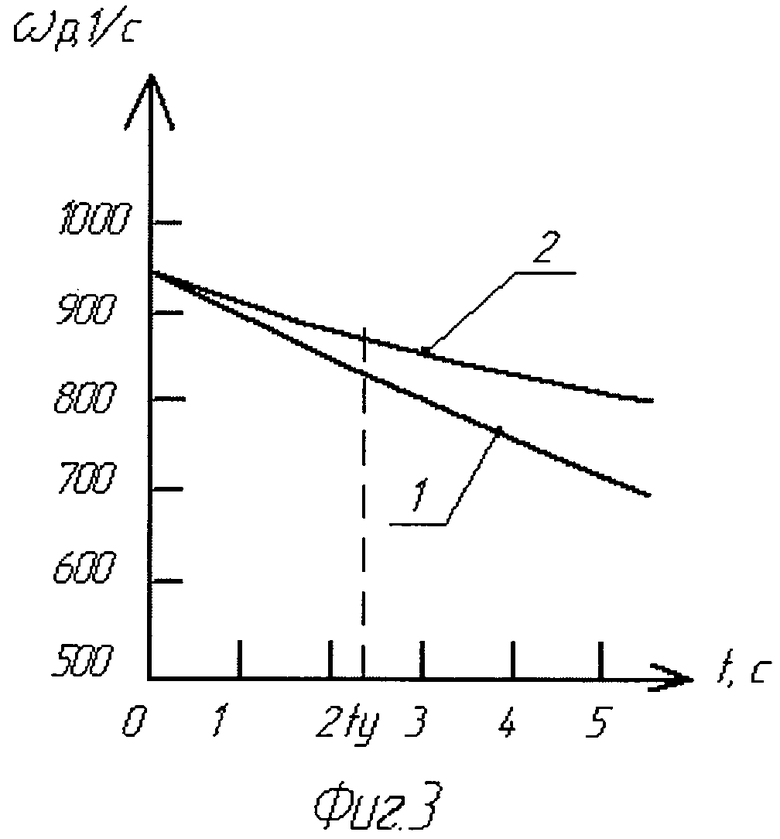
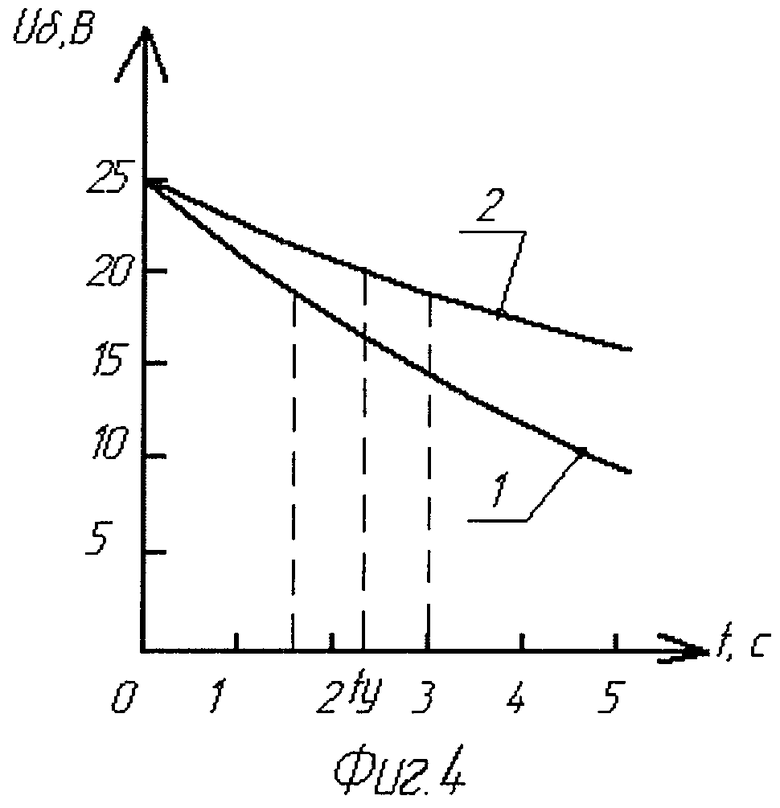
- сферической камеры внутри ротора, имеющего форму цилиндра с торцевыми поверхностями в виде усеченного конуса, диаметр основания которого равен диаметру цилиндра, диаметр усеченного конуса и его высота определяются из соотношений d/D=0,4-0,6 и h/D=0,3-0,5, где d - диаметр усеченной поверхности конуса, h - высота усеченного конуса, D - диаметр ротора, снизить аэродинамический момент сопротивления вращению ротора, что повышает время выбега ротора и выдачи напряжения необходимой величины для питания блока преобразования сигналов при работе электродвигателя постоянного тока в режиме генератора при полете снаряда, выполнение усеченного конуса при соотношении d/D<0,4 конструктивно не позволяет разместить в роторе цилиндрические камеры термокомпенсации плавучести поплавка, сообщающиеся со сферической камерой, а при соотношении d/D>0,6 увеличивает момент аэродинамического сопротивления, выполнение усеченного конуса при соотношении h/D<0,3 не позволяет изготовлять камеры термокомпенсации плавучести поплавка необходимого диаметра, а при соотношении h/D>0,5 увеличиваются габариты ротора вдоль оси его вращения;
- привода в виде электродвигателя постоянного тока, с возбуждением от постоянного магнита, размещенного внутри полого немагнитного якоря и электрически связанного с блоком преобразования сигналов, обеспечить электропитанием бортовую аппаратуру, исключив необходимость в бортовой батарее, повысить точность устройства угловой стабилизации, так как ввиду малой индуктивности обмотки якоря, в котором отсутствует железо, исключается искрение в коллекторе и, следовательно, не возникают наводки в сигнальной обмотке.
Признаки, характеризующие изобретение в конкретных формах исполнения, позволяют, в частности, за счет вращения полого немагнитного якоря противоположно направлению вращения датчика угловых отклонений вокруг его продольной оси обеспечить повышение эксплуатационной надежности и расширение функциональных возможностей.
Сущность изобретения заключается в том, что в известном устройстве угловой стабилизации вращающегося ракетного снаряда, содержащем датчик угловых отклонений с чувствительным элементом в виде оснащенного постоянным магнитом сферического поплавка, размещенного в сферической камере, заполненной жидкостью и механически связанной с приводом, сигнальной и опорными обмотками, блок преобразования сигналов и исполнительный орган, в отличие от прототипа, согласно изобретению сферическая камера выполнена внутри ротора, имеющего форму цилиндра с торцевыми поверхностями в виде усеченного конуса, диаметр основания которого равен диаметру цилиндра, диаметр усеченного конуса и его высота определяются из соотношений d/D=0,4-0,6 и h/D=0,3-0,5, где d - диаметр усеченного конуса, h - высота усеченного конуса, D - диаметр ротора, при этом привод выполнен в виде электродвигателя постоянного тока с возбуждением от постоянного магнита, размещенного внутри полого немагнитного якоря и электрически связан с блоком преобразования сигналов.
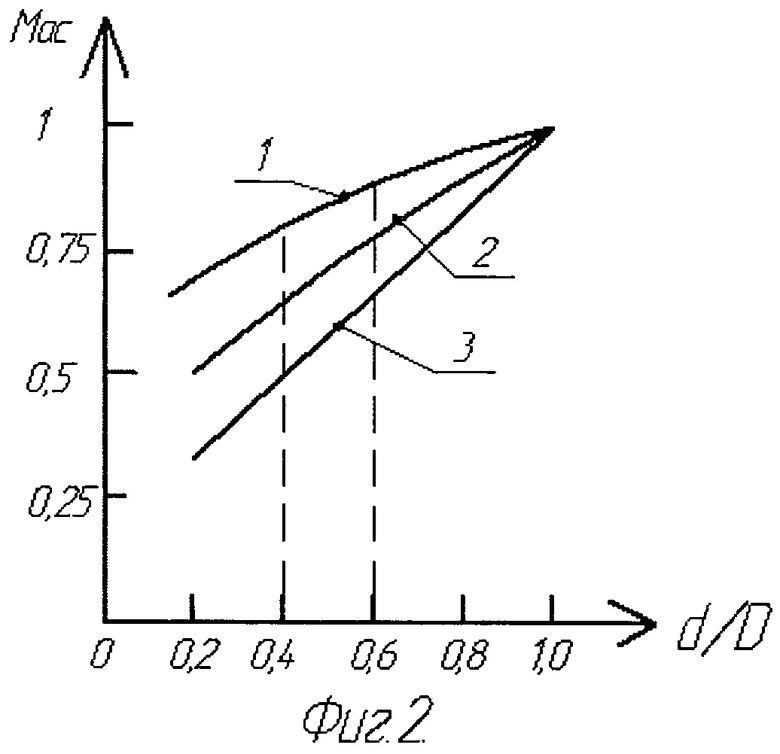
Сущность предлагаемого изобретения поясняется чертежом, где на фиг.1 изображен общий вид устройства угловой стабилизации вращающегося реактивного снаряда, на фиг.2 приведена зависимость момента аэродинамического сопротивления вращению ротора Мас в относительных единицах от соотношения размеров ротора, имеющего форму цилиндра с торцевыми поверхностями в виде усеченного конуса: 1 - h/D=0,3; 2 - h/D=0,4; 3 - h/D=0,5, на фиг.3 приведена зависимость угловой скорости вращения ротора ωд вращения ротора, работающего на выбеге, от времени t: 1 - ротор выполнен в форме цилиндра; 2 - ротор выполнен в форме цилиндра с торцевыми поверхностями в виде усеченного конуса, на фиг.4 показана зависимость напряжения Uб, вырабатываемого электродвигателем постоянного тока, работающего на выбеге в режиме генератора, от времени t полета снаряда; ty - требуемое время работы устройства угловой стабилизации.
Предлагаемое изобретение расположено во вращающемся реактивном снаряде 1 и содержит датчик угловых отклонений 2, блок преобразования сигналов 3, исполнительный орган 4. Датчик угловых отклонений 2 включает в себя ротор 5 со сферической камерой 6, заполненной жидкостью 7. Ротор 5 выполнен в форме цилиндра 8 с торцевыми поверхностями в виде усеченных конусов 9 и 10, и механически связан с электродвигателем постоянного тока 11. В сферической камере 6 размещен сферический поплавок 12, оснащенный постоянным магнитом 13. Датчик угловых отклонений 2 содержит сигнальную обмотку 14 и опорные обмотки 15 и 16. Электродвигатель постоянного тока 11 содержит постоянный магнит 17, у которого N - северный полюс, S - южный полюс, полый немагнитный якорь 18 с уложенными на нем секциями якорной обмотки 19, подсоединенными к пластинам коллектора 20, контактирующим с электрощетками 21, электрически связанными с блоком преобразования сигналов 3, немагнитный якорь 18 механически связан с ротором 5. Сигнальная обмотка 14 и опорные обмотки 15 и 16 электрически связаны со входом блока преобразования сигналов 3, выход которого электрически связан со входом исполнительного органа 4.
Предлагаемое устройство работает следующим образом.
Перед пуском вращающегося реактивного снаряда 1 на электрощетки 21 электродвигателя постоянного тока 11 от наземного источника питания подается постоянное напряжение Uн, в якорной обмотке 19 немагнитного якоря 18 возникает электрический ток, взаимодействие постоянного магнита 17 с якорной обмоткой 19 приводит к раскрутке ротора 5, при этом ось вращения поплавка 12, находящегося в жидкости 7, устанавливается вдоль оси вращения сферической камеры 6, затем производится пуск вращающегося реактивного снаряда 1, ротор 5 вращается одновременно со связанным с ним немагнитным якорем 18 и в якорной обмотке 19 при пересечении ими магнитного потока Ф постоянного магнита 17 возникает ЭДС индукции и на концах якорной обмотки 19 создается напряжение Uб, которое через коллектор 20 и электрощетки 21 подается на блок преобразования сигналов 3. При угловом отклонении продольной оси вращающегося реактивного снаряда 1 поплавок 12 стремится сохранить свое положение в пространстве за счет гироскопических свойств. Однако под действием моментов сил вязкого трения между жидкостью 7 и сферическим поплавком 12 возникает прецессия, которая при отклонении продольной оси снаряда определяет угол рассогласования между осью вращения сферического поплавка 12 и сферической камеры 6. Появление угла рассогласования приводит к тому, что в сигнальной обмотке 14 постоянный магнит 13 наводит переменное напряжение Uc, амплитуда которого пропорциональна вектору углового отклонения снаряда, а фаза - его направлению. Одновременно в опорных обмотках 15 и 16 постоянный магнит 13 наводит переменное напряжение Uоп1 и Uоп2 постоянной амплитуды, сдвинутые по фазе на 90°. Инерционность сферического поплавка 12 приводит к тому, что при угловом движении снаряда угол рассогласования определяется двумя составляющими, одна из которых пропорциональна угловому отклонению в плоскости тангажа, а вторая - в плоскости рыскания. Напряжение сигнальной обмотки 14 (Uc) и опорных обмоток 15 и 16 (Uоп1 и Uоп2) подается на вход блока преобразования сигналов 3, с выхода которого снимаются два управляющих сигнала Uу1 и Uу2, сдвинутые по фазе на 90° и соответствующие отклонению вращающего реактивного снаряда в плоскостях тангажа и рыскания.
Управляющие сигналы Uу1 и Uу2 поступают на исполнительный орган 4, например, газодинамического типа, который создает управляющие силы в связанной со снарядом системе координат на частоте его вращения, разложенные по плоскостям тангажа и рыскания, что обеспечивает парирование угловых отклонений продольной оси вращающегося реактивного снаряда, то есть стабилизацию его углового положения.
Выполнение устройства угловой стабилизации вращающегося реактивного снаряда в соответствии с изобретением позволило упростить устройство угловой стабилизации вращающегося реактивного снаряда и повысить его эксплуатационную надежность за счет исключения бортового источника питания, а также расширить функциональные возможности в случае отмены пусков.
Указанный положительный эффект подтвержден стендовыми и летными испытаниями опытных образцов, выполненных в соответствии с изобретением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство угловой стабилизации вращающегося реактивного снаряда | 2020 |
|
RU2761912C1 |
| СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 2009 |
|
RU2401975C1 |
| СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ ВРАЩАЮЩЕГОСЯ СНАРЯДА | 2013 |
|
RU2525576C1 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2310163C1 |
| СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2000 |
|
RU2181875C2 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2410645C1 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2433375C2 |
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2001 |
|
RU2205355C2 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2002 |
|
RU2230293C1 |
| ПРЕОБРАЗОВАТЕЛЬ СИГНАЛОВ УСТРОЙСТВА УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2005 |
|
RU2382321C2 |
Изобретение относится к области военной техники, а именно к устройствам угловой стабилизации вращающихся реактивных снарядов. Устройство содержит датчик угловых отклонений с чувствительным элементом, блок преобразования сигналов и исполнительный орган. Чувствительный элемент выполнен в виде сферического поплавка, оснащенного постоянным магнитом и размещенного в сферической камере, заполненной жидкостью. Чувствительный элемент механически связан с приводом сигнальной и опорными обмотками. Сферическая камера выполнена внутри ротора, имеющего форму цилиндра с торцевыми поверхностями в виде усеченного конуса. Диаметр основания усеченного конуса равен диаметру цилиндра, диаметр усеченного конуса и его высота определяются из соотношений d/D=0,4-0,6 и h/D=0,3-0,5, где d - диаметр усеченного конуса, h - высота усеченного конуса, D - диаметр ротора. Привод выполнен в виде электродвигателя постоянного тока с возбуждением от постоянного магнита, размещенного внутри полого немагнитного якоря. Привод электрически связан с блоком преобразования сигналов. Достигаются упрощение конструкции и повышение эксплуатационной надежности устройства. 1 з.п. ф-лы, 4 ил.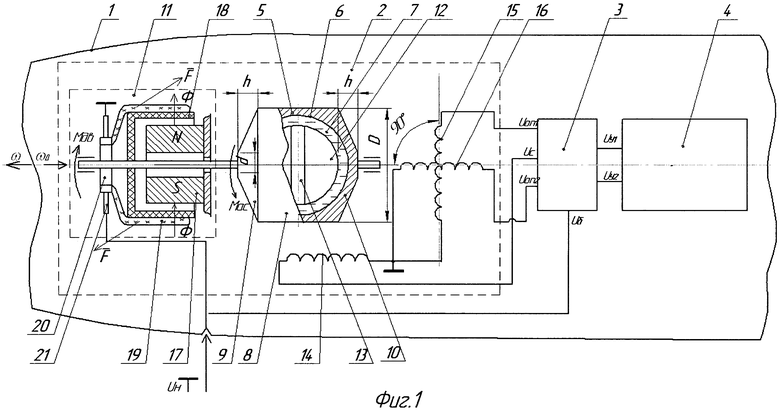
1. Устройство угловой стабилизации вращающегося реактивного снаряда, содержащее датчик угловых отклонений с чувствительным элементом в виде оснащенного постоянным магнитом сферического поплавка, размещенного в сферической камере, заполненной жидкостью и механически связанной с приводом, сигнальной и опорными обмотками, блок преобразования сигналов и исполнительный орган, отличающееся тем, что сферическая камера выполнена внутри ротора, имеющего форму цилиндра с торцевыми поверхностями в виде усеченного конуса, диаметр основания которого равен диаметру цилиндра, диаметр усеченного конуса и его высота определяются из соотношений d/D=0,4-0,6 и h/D=0,3-0,5, где d - диаметр усеченного конуса, h - высота усеченного конуса, D - диаметр ротора, при этом привод выполнен в виде электродвигателя постоянного тока с возбуждением от постоянного магнита, размещенного внутри полого немагнитного якоря, и электрически связан с блоком преобразования сигналов.
2. Устройство по п.1, отличающееся тем, что вращение полого немагнитного якоря противоположно направлению вращения датчика угловых отклонений вокруг его продольной оси.
| СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2000 |
|
RU2181875C2 |
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2001 |
|
RU2205355C2 |
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2002 |
|
RU2231015C1 |
| WO 2009002449 A1, 31.12.2008 | |||
| FR 2845763 A1, 16.04.2004 | |||
| JP 2000111299 A1, 18.04.2000. | |||

