Изобретение относится к области военной техники, а именно к устройствам угловой стабилизации вращающихся снарядов систем залпового огня, и может быть использовано для стабилизации углового положения продольной оси снаряда на активном участке траектории, снижения угловых разбросов в положении вектора скорости и тем самым повышения точностных характеристик снарядов.
Известна система угловой стабилизации реактивного вращающегося снаряда по патенту РФ №2181875, F42B 10/00, 15/01, опубликованная 27.04.2002 г., бюл. №12, принятая авторами за аналог, которая содержит измеритель угловых отклонений с чувствительным элементом, выполненным в виде сферического поплавка с установленным в нем постоянным кольцевым магнитом, размещенным в сферической камере, заполненной жидкостью и механически связанной с приводом, сигнальную и опорную обмотки, блок преобразования сигналов, исполнительный орган.
Такая система позволяет осуществить стабилизацию углового положения продольной оси снаряда на траектории.
Однако из-за существующих в измерителе угловых отклонений перекрестных связей, возникающих при взаимодействии постоянного магнита с приводом и отсутствия демпфирования поплавка в жидкости, существуют динамические ошибки, приводящие к возникновению спиральных движений в переходных процессах и, как следствие, система имеет конечную ошибку сигнала рассогласования, снижает точность стабилизации снаряда.
Задачей решения являлось повышение точности стабилизации путем снижения инструментальных ошибок преобразования сигналов датчика угловых отклонений.
Общими признаками с предлагаемой авторами системой угловой стабилизации вращающегося снаряда является наличие измерителя угловых отклонений с чувствительным элементом, механически связанным с приводом, устройством съема сигнала, блока преобразования сигнала и исполнительного органа.
Наиболее близким по технической сути и достигаемому техническому результату является система угловой стабилизации вращающегося снаряда по патенту РФ №2401975, F42B 10/00, 15/01, опубликованная 20.10.2010 г. в бюл. №29, принятая авторами за прототип, содержащая датчик угловых отклонений с чувствительным элементом, в виде сферического поплавка с установленным в нем постоянным кольцевым магнитом, размещенного в сферической камере, заполненной жидкостью и механически связанной с приводом, цилиндрическим магнитопроводом, устройством съема сигнала, в виде сигнальной и двух опорных обмоток, блок преобразования сигналов, входы которого соединены с сигнальной и опорными обмотками, а выход с исполнительным органом, датчик угловых отклонений снабжен кольцевым короткозамкнутым витком, расположенным между сферическим поплавком и цилиндрическим магнитопроводом в плоскости, перпендикулярной оси вращения сферической камеры, высота цилиндрического магнитопровода определяется из соотношения H/h=7.5-9.5, где Н - высота цилиндрического магнитопровода, h - высота постоянного кольцевого магнита, а постоянная времени датчика угловых отклонений выбирается из соотношения 0.4≤Т≤1.7, где Т - постоянная времени [с].
К недостаткам прототипа необходимо отнести следующее:
- большое время готовности системы угловой стабилизации, так как чувствительный элемент датчика угловых отклонений в виде сферического поплавка приводится во вращение до достижения требуемой угловой скорости от привода через связанную с ним механически сферическую камеру и слой заполняющей ее жидкости,
- сложность конструкции, низкая эксплуатационная надежность, обусловленная необходимостью выполнять герметичной сферическую камеру, заполненную жидкостью, а также размещением короткозамкнутого витка между вращающимся поплавком и неподвижным цилиндрическим магнитопроводом,
- снижение точности датчика углового отклонения в диапазоне температур ±50С из-за изменения вязкости жидкости в сферической камере.
Задачей прототипа являлось повышение точности стабилизации вращающегося реактивного снаряда за счет демпфирования колебаний чувствительного элемента и снижения величины перекрестной связи.
Общими признаками с предлагаемым устройством угловой стабилизации снаряда является наличие в прототипе измерителя угловых отклонений с чувствительным элементом, механически связанным с приводом, устройства съема сигнала, блока преобразования сигналов и исполнительного органа.
В отличие от прототипа в предлагаемом авторами устройстве угловой стабилизации вращающегося снаряда чувствительный элемент датчика угловых отклонений выполнен в виде несимметричного ротора с одной угловой степенью свободы, который подвешен в опоре, жестко связанной с корпусом вращающегося снаряда, с расположением оси опоры перпендикулярно продольной оси снаряда, устройство съема сигнала выполнено в виде двух датчиков, каждый из которых имеет статор с двумя обмотками, соединенными по мостовой схеме, блок преобразования сигналов включает генератор, дифференциальный усилитель, амплитудный детектор, фильтр низкой частоты и релейный усилитель,
при этом первая диагональ мостовой схемы соединена с выходом генератора, вторая - с входом дифференциального усилителя, выход которого последовательно соединен с амплитудным детектором, фильтром низкой частоты, релейным усилителем и исполнительным органом.
В частном случае, т.е. в конкретных формах выполнения, изобретение характеризуется тем, что приводом вращения чувствительного элемента, выполненного в виде несимметричного ротора с одной угловой степенью свободы, который подвешен в опоре, жестко связанной с корпусом вращающегося снаряда, с расположением оси опоры перпендикулярно продольной оси снаряда является корпус вращающегося снаряда.
Именно это позволяет сделать вывод о наличии причинно-следственной связи между совокупностью существенных признаков заявляемого технического решения и заявляемым техническим результатом.
Указанные признаки, отличительные от прототипа, и на которые распространяется испрашиваемый объем правовой защиты, во всех случаях достаточны.
Задачей предлагаемого изобретения являлось сокращение времени готовности системы угловой стабилизации вращающегося снаряда, упрощение конструкции, повышение эксплуатационной надежности.
Указанный технический результат при осуществлении изобретения достигается тем, что в устройства угловой стабилизации вращающегося снаряда чувствительный элемент выполнен в виде несимметричного ротора с одной угловой степенью свободы, который подвешен в опоре, жестко связанной с корпусом вращающегося снаряда, с расположением оси опоры перпендикулярно продольной оси снаряда, устройство съема сигнала выполнено в виде двух датчиков, каждый из которых имеет статор с двумя обмотками, соединенными по мостовой схеме, блок преобразования сигналов включает генератор, дифференциальный усилитель, амплитудный детектор, фильтр низкой частоты и релейный усилитель, при этом первая диагональ мостовой схемы соединена с выходом генератора, вторая - с входом дифференциального усилителя, выход которого последовательно соединен с амплитудным детектором, фильтром низкой частоты, релейным усилителем и исполнительным органом.
Новая совокупность конструктивных элементов, а также наличие новых связей между ними позволяют, в частности, за счет выполнения чувствительного элемента в виде несимметричного ротора с одной угловой степенью свободы, который подвешен в опоре, жестко связанной с корпусом вращающегося снаряда, с расположением оси опоры перпендикулярно продольной оси снаряда использовать в качестве привода сам вращающийся снаряд, что сокращает время готовности устройства, а за счет введения устройство съема сигнала, выполненного в виде двух датчиков, каждый из которых имеет статор с двумя обмотками, соединенными по мостовой схеме, блок преобразования сигналов включает генератор, дифференциальный усилитель, амплитудный детектор, фильтр низкой частоты и релейный усилитель, при этом первая диагональ мостовой схемы соединена с выходом генератора, вторая - со входом дифференциального усилителя, выход которого последовательно соединен с амплитудным детектором, фильтром низкой частоты, релейным усилителем и исполнительным органом, повысить точностные характеристики устройства стабилизации.
Признаки, характеризующие изобретение в конкретных формах исполнения, позволяют, в частности, за счет того, что приводом вращения чувствительного элемента, выполненного в виде несимметричного ротора с одной угловой степенью свободы, который подвешен в опоре, жестко связанной с корпусом вращающегося снаряда, с расположением оси опоры перпендикулярно продольной оси снаряда является корпус вращающегося снаряда, обеспечить сокращение времени готовности устройства угловой стабилизации, сохранить на уровне неуправляемых снарядов темп стрельбы, упростить конструкцию устройства, повысить эксплуатационную надежность.
Сущность изобретения заключается в том, что в известной системе угловой стабилизации вращающегося снаряда, содержащим измеритель угловых отклонений с чувствительным элементом, механически связанным с приводом, устройством съема сигнала, блок преобразования сигналов и исполнительный орган согласно изобретению, чувствительный элемент выполнен в виде несимметричного ротора с одной угловой степенью свободы, который подвешен в опоре, жестко связанной с корпусом вращающегося снаряда, с расположением оси опоры перпендикулярно продольной оси снаряда, устройство съема сигнала выполнено в виде двух датчиков, каждый из которых имеет статор с двумя обмотками, соединенными по мостовой схеме, блок преобразования сигналов включает генератор, дифференциальный усилитель, амплитудный детектор, фильтр низкой частоты и релейный усилитель, при этом первая диагональ мостовой схемы соединена с выходом генератора, вторая - с входом дифференциального усилителя, выход которого последовательно соединен с амплитудным детектором, фильтром низкой частоты, релейным усилителем и исполнительным органом. При этом привод вращения чувствительного элемента измерителя угловых отклонений выполнен в виде вращающегося вокруг продольной оси корпуса снаряда.
На фиг.1 изображено предлагаемая система угловой стабилизации вращающегося снаряда.
Система, установленная в корпусе вращающегося снаряда 1, содержит измеритель угловых отклонений 2, чувствительный элемент выполнен в виде несимметричного ротора 3 с одной угловой степенью свободы - α, опора 14, ось опоры 13 два датчика 4, статоры датчиков 5, 15, обмотки 16, 17, индуктивности которых L1, L2, L3, L4, преобразователь сигнала 6, генератор 7, дифференциальный усилитель 8, амплитудный детектор 9, фильтр низкой частоты 10, релейный усилитель 11, исполнительный орган 12.
Система угловой стабилизации, установленная на снаряде 1, функционирует следующим образом. Производится пуск снаряда 1 с предварительной закруткой, например, из направляющей, имеющей винтовой паз. При этом снаряд снабжен штифтом, который скользит по пазу направляющей, и за время движения по направляющей закручивается до заданной скорости ω. Чувствительный элемент (ротор) 3, связанный посредством опоры 14 с корпусом снаряда 1, приобретает гироскопические свойства (кинетический момент ротора), и на момент выхода снаряда 1 с направляющей устройство угловой стабилизации готово к работе. В дальнейшем вращение снаряда 1 на участке стабилизации поддерживается, например, за счет косопоставленного оперения. При угловом отклонении продольной оси снаряда 1 под действием возмущений чувствительный элемент (несимметричный ротор) 3, который подвешен в опоре 14, связанной с корпусом вращающегося снаряда 1, совершает колебания относительно имеющейся угловой степени свободы с амплитудой, пропорциональной угловой скорости отклонения продольной оси снаряда 1. При этом частота колебаний определяется частотой вращения снаряда 1. Фаза колебаний - направлением вектора угловой скорости отклонения продольной оси стабилизируемого снаряда 1. Колебания чувствительного элемента (несимметричного ротора) 3 изменяют индуктивность катушек L1, L2, L3, L4 датчиков 4 за счет изменения магнитной связи ротора 3 и статоров 5, 15 датчиков съема сигнала 4. Катушки 16, 17 соединены по мостовой схеме для увеличения чувствительности датчиков 4 съема сигнала. Первая диагональ мостовой схемы а-а соединена с выходом генератора 7. При угловом отклонении ротора, например, по часовой стрелке на угол α индуктивное сопротивление катушек L2, L3 увеличивается, а катушек L1, L4 - уменьшается, что приводит к разбалансировке мостовой схемы, при этом со второй диагонали моста б-б снимается напряжение, пропорциональное угловому отклонению ротора.
Учитывая, что ротор 3 совершает угловые колебания по углу α, со второй диагонали мостовой схемы снимается амплитудно-модулированное напряжение, пропорциональное угловому отклонению ротора 3 на несущей частота генератора 7. Это напряжение усиливается дифференциальным усилителем 8 и детектируется амплитудным детектором 9 с последующей фильтрацией несущей генератора 7 фильтром низкой частоты 10 и усилением по мощности релейным усилителем 11, необходимым для переключения, например, газодинамического исполнительного органа 12. Исполнительный орган создает управляющую силу F в связанной со снарядом системе координат на частоте его вращения ω. Вращение самого снаряда ω осуществляет демодуляцию полученной управляющей силы F исполнительного органа, что обеспечивает парирование угловых отклонений продольной оси снаряда, вызванных возмущениями, то есть стабилизацию углового положения снаряда 1.
Выполнение системы угловой стабилизации вращающегося снаряда в соответствии с изобретением позволило повысить точностные характеристики снаряда за счет стабилизации положения его продольной оси, снизить время готовности устройства.
Указанный положительный эффект подтвержден стендовыми испытаниями опытных образцов, выполненными в соответствии с изобретением и летно-конструкторскими испытаниями реактивных снарядов, стабилизируемых заявляемым устройством угловой стабилизации.
В настоящее время разработана конструкторская документация для опытного производства системы угловой стабилизации вращающегося снаряда.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА КОМАНДЫ ОДНОКАНАЛЬНЫХ ВРАЩАЮЩИХСЯ РАКЕТ И СНАРЯДОВ С РЕЛЕЙНЫМ РУЛЕВЫМ ПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2574500C2 |
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2002 |
|
RU2231015C1 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ОБЪЕКТА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ | 2016 |
|
RU2629691C1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК УГЛОВЫХ ПОЛОЖЕНИЙ ОБЪЕКТА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2016 |
|
RU2629690C1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ В ДАТЧИКЕ УГЛОВОЙ СКОРОСТИ С ДИСКРЕТНЫМ ВЫХОДОМ И ДАТЧИК УГЛОВОЙ СКОРОСТИ С ДИСКРЕТНЫМ ВЫХОДОМ | 2004 |
|
RU2272297C1 |
| Устройство угловой стабилизации вращающегося реактивного снаряда | 2020 |
|
RU2761912C1 |
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2001 |
|
RU2205355C2 |
| СПОСОБ СТАБИЛИЗАЦИИ СЛАБОДЕМПФИРОВАННОГО НЕУСТОЙЧИВОГО ОБЪЕКТА УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2581787C2 |
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 2010 |
|
RU2435129C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2006 |
|
RU2313797C1 |
Изобретение относится к области военной техники, а именно к системе угловой стабилизации вращающегося снаряда. Система угловой стабилизации вращающегося снаряда содержит измеритель угловых отклонений с чувствительным элементом, блок преобразования сигналов и исполнительный орган. Измеритель угловых отклонений содержит чувствительный элемент, механически связанный с приводом и устройством съема сигнала. Чувствительный элемент выполнен в виде несимметричного ротора с одной угловой степенью свободы. Ротор подвешен в опоре, жестко связанной с корпусом вращающегося снаряда, с расположением оси опоры перпендикулярно продольной оси снаряда. Устройство съема сигнала выполнено в виде двух датчиков, каждый из которых имеет статор с двумя обмотками, соединенными по мостовой схеме. Блок преобразования сигналов включает генератор, дифференциальный усилитель, амплитудный детектор, фильтр низкой частоты и релейный усилитель. При этом первая диагональ мостовой схемы соединена с выходом генератора, а вторая - со входом дифференциального усилителя. Выход усилителя последовательно соединен с амплитудным детектором, фильтром низкой частоты, релейным усилителем и исполнительным органом. Достигается повышение точности угловой стабилизации. 1 з.п. ф-лы, 1 ил.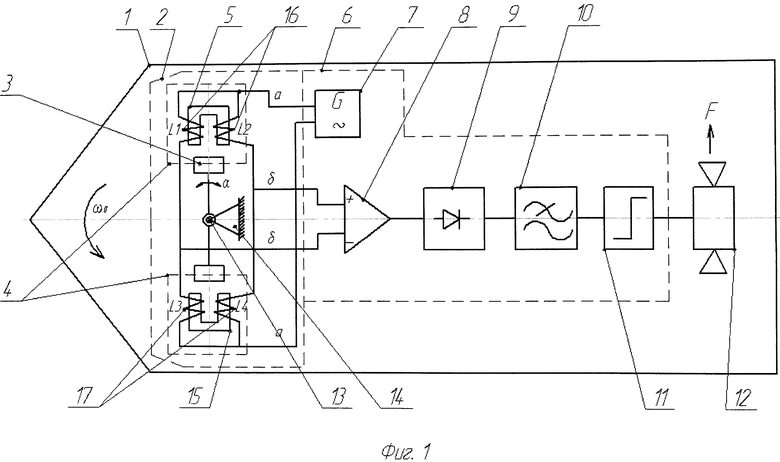
1. Система угловой стабилизации вращающегося снаряда, содержащая измеритель угловых отклонений с чувствительным элементом, механически связанным с приводом, устройством съема сигнала, блок преобразования сигналов и исполнительный орган, отличающаяся тем, что чувствительный элемент выполнен в виде несимметричного ротора с одной угловой степенью свободы, который подвешен в опоре, жестко связанной с корпусом вращающегося снаряда, с расположением оси опоры перпендикулярно продольной оси снаряда, устройство съема сигнала выполнено в виде двух датчиков, каждый из которых имеет статор с двумя обмотками, соединенными по мостовой схеме, блок преобразования сигналов включает генератор, дифференциальный усилитель, амплитудный детектор, фильтр низкой частоты и релейный усилитель, при этом первая диагональ мостовой схемы соединена с выходом генератора, вторая - со входом дифференциального усилителя, выход которого последовательно соединен с амплитудным детектором, фильтром низкой частоты, релейным усилителем и исполнительным органом.
2. Система по п.1, отличающаяся тем, что привод вращения чувствительного элемента измерителя угловых отклонений выполнен в виде вращающегося вокруг продольной оси корпуса снаряда.
| US 20040129166 A1, 08.07.2004 | |||
| US 7541563 B1, 02.06.2009 | |||
| СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 2009 |
|
RU2401975C1 |
| . | |||

