Изобретение относится к области военной техники, а именно к системам управления вращающимися или проворачивающимися по крену ракетами, и может быть использовано, например, для угловой стабилизации реактивных снарядов систем залпового огня.
Известна система угловой стабилизации летательных аппаратов (см. Кузовков Н. Т. Системы стабилизации летательных аппаратов М., Высшая школа, 1976, с. 238. рис. 7.16), принятая за аналог. Система содержит датчик угловых отклонений, блок преобразования и усиления сигналов, исполнительные органы.
Задачей данного технического решения являлось повышение точности стабилизации за счет вращения ракеты вокруг ее продольной оси.
Однако придание вращения ракете приводит к увеличению инструментальных ошибок преобразования сигнала датчика в управляющий сигнал, который отрабатывается исполнительными органами.
Общими признаками с предлагаемой авторами системой угловой стабилизации является наличие в системе-аналоге датчика угловых отклонений, блока преобразования и усиления сигналов, исполнительных органов.
Указанного недостатка лишено устройство угловой стабилизации вращающейся ракеты (см. патент РФ 2126129), являющееся наиболее близким по технической сути к изобретению и принятое за прототип.
Оно содержит датчик угловых отклонений с чувствительным элементом, оснащенным постоянным магнитом, и связанным с электроприводом, сигнальную и опорную обмотки, блок преобразования сигналов, исполнительный орган.
Задачей прототипа являлось повышение точности стабилизации ракеты за счет снижения инструментальных ошибок, путем формирования результирующего сигнала рассогласования с последующим его преобразованием в результирующий сигнал управления без его разложения по каналам.
Недостатком технического решения, используемого в прототипе, является то, что из-за существующих в датчике перекрестных связей, которые возникают из-за связи чувствительного элемента с постоянным магнитом с приводом и конечного быстродействия исполнительного органа, в системе существуют динамические ошибки, приводящие к возникновению спиральных движений в переходных процессах, и как следствие система имеет конечную ошибку сигнала рассогласования, что не позволяет повысить точность стабилизации снаряда.
Общими признаками с предлагаемой системой стабилизации снаряда является наличие в прототипе датчика угловых отклонений с чувствительным элементом с постоянным магнитом, приводом, сигнальной и опорной обмотками, газодинамического исполнительного органа со сверхзвуковыми соплами, блока преобразования сигналов, входы которого соединены с сигнальной и опорной обмотками, а выход - с газодинамическим исполнительным органом.
В отличие от прототипа в предлагаемой авторами системе угловой стабилизации датчик угловых отклонений дополнительно снабжен второй опорной обмоткой, смещенной на 90o градусов по отношению к первой опорной обмотки и соединенной с дополнительным входом блока преобразования сигналов, чувствительный элемент датчика угловых отклонений выполнен в виде сферического поплавка и размещен в сферической камере, механически связанной с приводом, при этом сферическая камера заполнена жидкостью с вязкостью 0,0022...0,04 см2/с, на корпусе снаряда закреплены втулки коаксиально соплам с зазором между наружным диаметром сопла и внутренним диаметром втулки, а угол установки осей сопел относительно опорных обмоток определяется по формуле:
φ = ωτ+arctgKПС,
где φ -угол установки осей сопел относительно опорных обмоток, ω -частота вращения снаряда, τ -время запаздывания газодинамического исполнительного органа, КПС - коэффициент перекрестной связи датчика угловых отклонений.
Именно это позволяет сделать вывод о наличии причинно-следственной связи между совокупностью существенных признаков заявляемого технического решения и достигаемым техническим результатом.
Указанные признаки, отличительные от прототипа и на которые распространяется испрашиваемый объем правовой защиты, во всех случаях достаточны.
Задачей предлагаемого изобретения является повышение точности стабилизации снаряда за счет снижения динамических ошибок системы и повышения эффективности управления.
Выполнение датчика угловых отклонений с сигнальной и двумя опорными обмотками, оси которых развернуты на 90o, позволило сформировать сигналы рассогласования, а после блока преобразования и сигналы управления и управляющие силы на частоте вращения снаряда, сдвинутые по фазе на 90o, что позволило разложить сигнал по плоскостям тангажа, рыскания и соответственно вести управление по этим составляющим. Таким образом, снижаются пульсации по амплитуде и в два раза повышается их частота. Это приводит к снижению динамической ошибки стабилизации.
Выполнение чувствительного элемента в виде сферического поплавка, помещенного в сферическую камеру, заполненную жидкостью с вязкостью 0,0022...0,04 см2/с, исключает погрешности, вызванные продольными и поперечными ускорениями движения снаряда, а также виброускорениями. Точность измерения углового отклонения продольной оси снаряда тем выше, чем больше постоянная времени (инерционность) чувствительного элемента, что может быть достигнуто уменьшением вязкости заполняющей камеру жидкости. Однако при очень малой вязкости жидкости, например приближенной к вязкости воздуха, необходимо обеспечивать значительный разнос собственной частоты поплавка от частот возмущающих воздействий, так как коэффициент относительного демпфирования при этом является крайне малым 10-5...10-6. Это определяет высокую колебательность гидродинамического подвеса в зоне резонанса, приводящей к потере устойчивости вращающегося снаряда (см., например, Д. С. Пельпор, Ю.А. Осокин, Е.Р. Рахтсенко "Гироскопические приборы систем ориентации и стабилизации", М., Машиностроение, 1977 г., стр. 119-120). Кроме того с уменьшением вязкости жидкости увеличивается величина перекрестной связи КПС в чувствительном элементе из-за несферичности поплавка, обусловленной технологическими погрешностями.
Расчетно-теоретическим путем было установлено, что для обеспечения максимально возможного коэффициента передачи датчика (постоянной времени), минимальной величины перекрестной связи КПС и достаточного коэффициента относительного демпфирования, для стабильной работы чувствительного элемента и устойчивой стабилизации реактивного снаряда вязкость жидкости, заполняющая камеру, должна лежать в диапазоне 0,0022...0,04 см2/с.
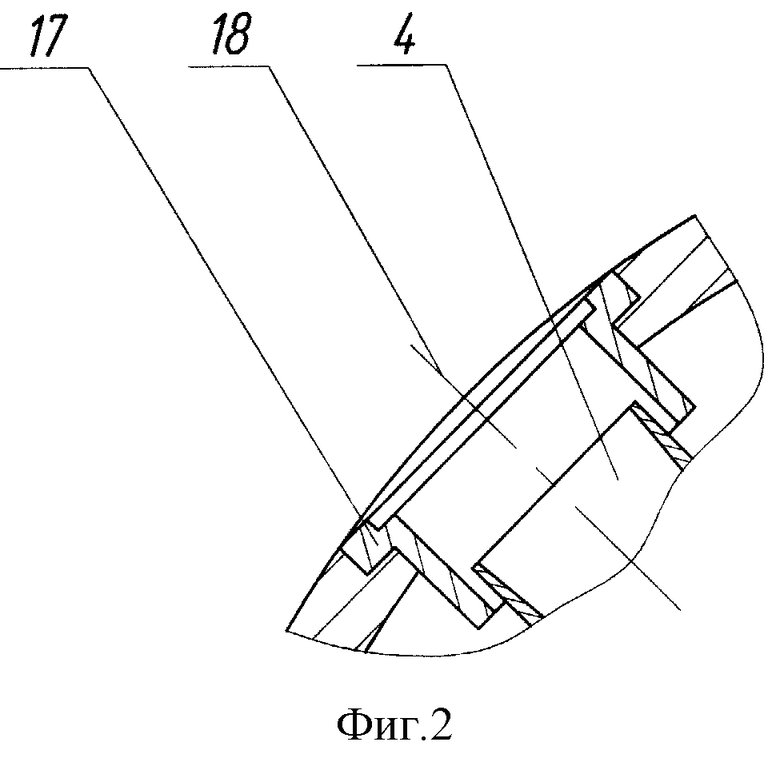
Снабжение каждого сверхзвукового сопла газодинамического исполнительного органа втулкой, которая закреплена коаксиально соплам с зазором между наружным диаметром сопла и внутренним диаметром втулки, обеспечивает уменьшение разброса управляющего усилия (тяги) в широком диапазоне эксплуатационных параметров за счет различных режимов эжекции воздуха и обеспечивает технологичность конструкции.
Конечное значение перекрестной связи датчика, оцениваемое коэффициентом перекрестной связи КПС, а также конечное быстродействие газодинамического исполнительного органа, оцениваемое временем запаздывания τ, приводит к динамическим ошибкам и спиральным пространственным движениям продольной оси стабилизируемого снаряда.
Для снижения указанных ошибок стабилизации, согласно изобретению, угол установки осей сопел относительно опорных обмоток определяется формулой:
φ = ωτ+arctgKПС,
где φ - угол установки осей сопел относительно опорных обмоток, ω - частота вращения снаряда, τ - время запаздывания газодинамического исполнительного органа, КПС - коэффициент перекрестной связи датчика угловых отклонений.
Сущность изобретения заключается в том, что в системе угловой стабилизации реактивного снаряда, содержащей датчик угловых отклонений с чувствительным элементом с постоянным магнитом, приводом, сигнальной и опорной обмотками, газодинамический исполнительный орган со сверхзвуковыми соплами, блок преобразования сигналов, входы которого соединены с сигнальной и опорной обмотками, а выход - с газодинамическим исполнительным органом, датчик угловых отклонений дополнительно снабжен второй опорной обмоткой, смещенной на 90o по отношению к первой опорной обмотке и соединенной с дополнительным входом блока преобразования сигналов, чувствительный элемент датчика угловых отклонений выполнен в виде сферического поплавка и размещен в сферической камере, механически связанной с приводом, при этом сферическая камера заполнена жидкостью с вязкостью 0,0022...0,04 см2/с, на корпусе снаряда закреплены втулки коаксиально соплам с зазором между наружным диаметром сопла и внутренним диаметром втулки, а угол установки осей сопел относительно опорных обмоток определяется по формуле:
φ = ωτ+arctgKПС,
где φ - угол установки осей сопел относительно опорных обмоток, ω - частота вращения снаряда, τ - время запаздывания газодинамического исполнительного органа, КПС - коэффициент перекрестной связи датчика угловых отклонений.
На фиг. 1 изображена предлагаемая система угловой стабилизации реактивного снаряда, содержащая датчик угловых отклонений 1, блок преобразования сигналов 2, газодинамический исполнительный орган 3 со сверхзвуковыми соплами 4, а на фиг.2 укрупненно показано размещение сопла в корпусе реактивного снаряда.
Датчик угловых отклонений 1 включает в себя сигнальную обмотку 5, опорные обмотки 6 и 7, привод 8, механически связанный со сферической камерой 9, которая заполнена жидкостью 10 с размещенным в ней чувствительным элементом 11 с постоянным кольцевым магнитом 12, при этом оси 13 и 14 опорных обмоток 6 и 7 расположены взаимно перпендикулярно и перпендикулярны продольной оси снаряда.
Блок преобразования сигналов 2 включает в себя два демодулятора 15 и 16.
Газодинамический исполнительный орган 3 содержит четыре сверхзвуковых сопла 4 и втулки 17. Оси 18 и 19 сопел 4 взаимно перпендикулярны, лежат в плоскости, перпендикулярной продольной оси снаряда, и развернуты относительно осей 13 и 14 на угол φ.
Снаряд с установленной в нем системой угловой стабилизации вращается вокруг своей продольной оси с частотой ω.
Предлагаемое устройство работает следующим образом.
Перед пуском реактивного снаряда привод 8 раскручивает сферическую камеру 9, заполненную вязкой жидкостью 10, которая вовлекает во вращение чувствительный элемент 11. Так как чувствительный элемент 11 выполнен в виде сферического поплавка, то благодаря этому обеспечивается его радиальное центрирование, а соотношение главных моментов инерции таково, что вектор кинетического момента поплавка совпадает с осью вращения камеры 9. При угловом отклонении продольной оси снаряда чувствительный элемент 11 стремится сохранить свое положение за счет гироскопических свойств. Однако под действием моментов сил вязкого трения между жидкостью 10 и чувствительным элементом 11 возникает прецессия, которая при отклонении продольной оси снаряда определяет угол рассогласования между осью вращения сферической камеры 9 и осью вращения чувствительного элемента 11. Появление угла рассогласования приводит к тому, что в сигнальной обмотке 5 постоянный кольцевой магнит 12 наводит переменное напряжение, амплитуда которого пропорциональна вектору углового отклонения снаряда, а фаза определяет направление вектора отклонения, частота равна частоте вращения чувствительного элемента 11. Одновременно в опорных обмотках 6 и 7 постоянный кольцевой магнит 3 наводит переменные напряжения постоянной амплитуды, сдвинутые по фазе на 90o. Инерционность чувствительного элемента 11 приводит к тому, что при угловом движении снаряда, например, строго в плоскости тангажа, угол рассогласования определяется двумя составляющими, одна из которых пропорциональна угловому отклонению в плоскости тангажа, а вторая определяется перекрестной связью КПС. При этом фаза напряжения сигнальной обмотки 5 также зависит от указанного коэффициента. Напряжение сигнальной обмотки 5 и опорных обмоток 6 и 7 подается на вход блока преобразования сигналов 2, представляющего собой, например, два амплитудно-фазовых демодулятора 15 и 16 с фильтрами НЧ. На выходе последних получается два управляющих сигнала, сдвинутых по фазе на 90o и соответствующих измеренному значению углового положения снаряда на частоте его вращения ω. Управляющие сигналы поступают на газодинамический исполнительный орган 3, сопла 4 которого создают через втулки 17 управляющие силы в связанной со снарядом системе координат на частоте его вращения. Вращение самого снаряда осуществляют в соответствии с углом φ, учитывающим запаздывание исполнительного органа и перекрестную связь датчика угловых отклонений, разложение управляющих сил исполнительного органа 3 по плоскостям тангажа и рыскания, что обеспечивает парирование угловых движений продольной оси снаряда, то есть стабилизацию углового положения.
Выполнение системы угловой стабилизации реактивного снаряда в соответствии с изобретением позволило повысить точность стабилизации снаряда за счет снижения динамических ошибок системы и более эффективного управления, что в целом улучшило точностные характеристики РСЗО в 2...3 раза.
Указанный положительный эффект подтвержден стендовыми и летно-конструкторскими испытаниями опытных образцов, выполненных в соответствии с изобретением.
В настоящее время разработана конструкторская документация, проведены государственные испытания, намечено серийное производство системы угловой стабилизации реактивного снаряда.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 2010 |
|
RU2435129C1 |
| СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 2009 |
|
RU2401975C1 |
| Устройство угловой стабилизации вращающегося реактивного снаряда | 2020 |
|
RU2761912C1 |
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2001 |
|
RU2205355C2 |
| СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ ВРАЩАЮЩЕГОСЯ СНАРЯДА | 2013 |
|
RU2525576C1 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2410645C1 |
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2002 |
|
RU2231015C1 |
| ПРЕОБРАЗОВАТЕЛЬ СИГНАЛОВ УСТРОЙСТВА УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2005 |
|
RU2382321C2 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2002 |
|
RU2230293C1 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 1995 |
|
RU2116623C1 |
Изобретение относится к военной технике, а именно к системам управления летательных аппаратов. Технический результат - повышение точности стабилизации. Система угловой стабилизации реактивного снаряда содержит датчик угловых отклонений с чувствительным элементом с постоянным магнитом, приводом, сигнальной и опорной обмотками, газодинамический исполнительный орган со сверхзвуковыми соплами, блок преобразования сигналов, входы которого соединены с сигнальной и опорной обмотками, а выход - с газодинамическим исполнительным органом. В системе датчик угловых отклонений дополнительно снабжен второй опорной обмоткой, смещенной на 90o по отношению к первой опорной обмотке и соединенной с дополнительным входом блока преобразования сигналов, чувствительный элемент датчика угловых отклонений выполнен в виде сферического поплавка и размещен в сферической камере, механически связанной с приводом, при этом сферическая камера заполнена жидкостью с вязкостью 0,0022-0,04 см2/с. На корпусе снаряда закреплены втулки коаксиально соплам с зазором между наружным диаметром сопла и внутренним диаметром втулки, а угол установки осей сопел относительно опорных обмоток определяется по формуле: φ = ωτ+arctgKПС, где φ - угол установки осей сопел относительно опорных обмоток, ω - частота вращения снаряда, τ - время запаздывания газодинамического исполнительного органа, КПС - коэффициент перекрестной связи датчика угловых отклонений. Достигается повышение точности стабилизации реактивного снаряда за счет снижения динамических ошибок системы. 2 ил.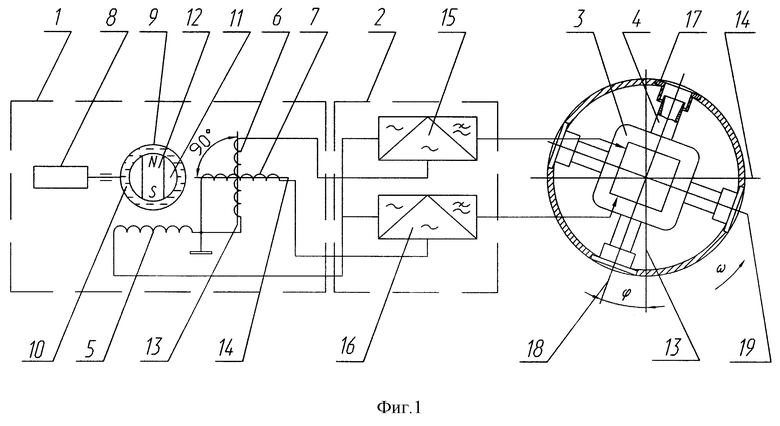
Система угловой стабилизации реактивного снаряда, содержащая датчик угловых отклонений с чувствительным элементом с постоянным магнитом, приводом, сигнальной и опорной обмотками, газодинамический исполнительный орган со сверхзвуковыми соплами, блок преобразования сигналов, входы которого соединены с сигнальной и опорной обмотками, а выход - с газодинамическим исполнительным органом, отличающаяся тем, что датчик угловых отклонений дополнительно снабжен второй опорной обмоткой, смещенной на 90o по отношению к первой опорной обмотке и соединенной с дополнительным входом блока преобразования сигналов, чувствительный элемент датчика угловых отклонений выполнен в виде сферического поплавка и размещен в сферической камере, механически связанной с приводом, при этом сферическая камера заполнена жидкостью с вязкостью 0,0022-0,04 см2/с, на корпусе снаряда закреплены втулки коаксиально соплам с зазором между наружным диаметром сопла и внутренним диаметром втулки, а угол установки осей сопел относительно опорных обмоток определяется по формуле
φ = ωτ+arctgKПС,
где φ - угол установки осей сопел относительно опорных обмоток;
ω - частота вращения снаряда;
τ - время запаздывания газодинамического исполнительного органа;
Кпс - коэффициент перекрестной связи датчика угловых отклонений.
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 1998 |
|
RU2126129C1 |
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |
| Экономайзер | 0 |
|
SU94A1 |
| US 4168813, 25.09.1979. | |||
